
基于干扰补偿的不确定机器人鲁棒滑模跟踪控制
2016-08-22 07:13唐传胜李忠敏
组合机床与自动化加工技术 2016年7期
唐传胜,李忠敏 ,李 超
(1.南阳理工学院 机械与汽车工程学院,河南 南阳 473004;2.南阳工业学校 机电工程系,河南 南阳 473035;3.南阳市红阳锻造有限公司,河南 南阳 473000)
基于干扰补偿的不确定机器人鲁棒滑模跟踪控制
唐传胜1,李忠敏2,李超3
(1.南阳理工学院 机械与汽车工程学院,河南 南阳473004;2.南阳工业学校 机电工程系,河南 南阳473035;3.南阳市红阳锻造有限公司,河南 南阳473000)
以含有参数不确定和外部扰动的机器人系统为对象,研究不确定机器人系统的轨迹跟踪问题。结合系统辨识理论和滑模理论,提出了一种基于干扰补偿的机器人鲁棒滑模控制方法。该方法采用非线性观测器实现系统不确定项的在线估计与补偿,利用滑模控制来增强系统的鲁棒性,并利用基于sigmoid函数的新型滑模趋近率来抑制传统滑模控制的固有抖振现象。最后,以2关节机器人为例,通过仿真验证了文中方法的有效性,不仅有效解决了传统滑模控制的固有抖振现象,而且对系统存在的不确定性扰动具有很强的鲁棒性。
机器人;滑模控制;非线性观测器
0 引言
随着工业自动化程度的提高和人工成本的增加,机器人代替手工劳动已经成为当前诸多行业广泛采用的手段,譬如在锻压、物流、装配、焊接等行业,尤其适用于环境恶劣的情况下。然而,环境的变化、非线性摩擦、负载扰动及未建模动态等不确定因素的影响会增加机器人的控制难度。工业中最常用的控制方法是经典的PID控制,多自由度机器人系统是一个复杂的、时变强耦合非线性的,该方法是建立在确定机器人系统的精确模型基础之上。而在实际工程中很难得到其精确的数学模型。有学者用智能算法来实现PID控制参数的自适应优化,如模糊PID控制、神经网络PID控制等[1-3],致使控制系统变成复杂的多输入多输出控制器设计(输出kp、kI和kd),这会增加设计的复杂程度。针对含有参数不确定的机器人系统,Bong Seok Park等[4]利用自适应方法来实现移动机器人参数的在线估计,但是该方法增加了计算量,增加系统开支,在一定程度上降低其动态响应能力。吴常铖等[5]将反步方法用于机器人手抓的控制,然而反步控制需要每步进行微分求导,这会造成“知识爆炸”等问题。模糊系统和神经网络具有高度的非线性逼近能力,成为解决复杂非线性系统的有力工具。有学者将模糊控制、神经网络控制等[6-7]应用到机器人中,提出了机器人的智能控制方法。在应用中,神经网络控制和模糊控制的结构比较复杂,网络的权值和结构难以确定,模糊控制的规则至今没有统一的形式,在应用中有一定的难度。
滑模控制对系统的参数变化和外部扰动不敏感,且无需系统的在线辨识,在机器人控制中得到广泛的应用。但是,滑模控制[8]固有的抖振现象称为该方法在实际推广中的最大障碍。为了解决抖振问题,文献[9]采用新型趋近率,并将其成功应用于永磁同步电机的控制中。文献[10]将高阶滑模控制应用于非完整移动机器人的轨迹跟踪控制,有效地消弱了滑模控制带来的抖振。高阶滑模控制适用于低阶系统,对于高阶系统来说,该方法需要求解复杂的多元方程组,增加了控制器的复杂性。
本文针对不确定机器人系统存在的参数不确定和外部扰动等不确定因素(本文称为总扰动),利用非线性观测器来实现总扰动的在线估计与反馈补偿,并利用sigmoid函数替换传统滑模控制中的符号开关函数,来降低系统带来的抖振现象,提高机器人的鲁棒性和跟踪精度。
1 不确定机器人模型
采用刚性连接n自由度机器人的数学模型[11]为:
(1)

由系统(1)可知:该系统不仅包含有机器人参数摄动,而且包含摩擦及外部扰动等不确定因素。不确定机器人系统的控制目标就是在考虑上述不确定因素的影响下,通过设计控制输入τ来实现闭环受控机器人系统的精确鲁棒跟踪。
2 不确定机器人鲁棒滑模控制器设计
2.1基于S函数的滑模控制器设计
由于滑模控制不仅结构简单,易于实现,而且对系统参数不确定和外部扰动具有很强的鲁棒性,因此本文采用滑模控制实现机器人的鲁棒轨迹跟踪。
设n自由度机器人的期望轨迹为xd∈Rn,则其跟踪误差为:
xe=xd-x
(2)
定义滑模面:
(3)
其中,C=diag(c1,c2,…,cn)为对角矩阵。
则:
采用新型趋近率[7]:
(4)
则:
(5)
取Lyapunov函数:
(6)
对V沿系统(1)求导,
故采用式(4)的控制率时机器人系统(1)是渐进稳定的,即能够实现机器人的位置跟踪。

ρ(x)=2/(1+e-γx)-1,γ>0
(7)
此时,控制输入的表达式为:
(8)
下面给出非线性干扰观测器的详细设计过程,实现不确定项f在线估计。
2.2非线性干扰观测器设计
根据机器人系统(1),设计的观测器为[12]:
(9)
(10)
设其观测误差为:
(11)
则:
根据微分方程知识,可求得:
(12)

总之,本文设计的控制器结构如图1所示。

图1 基于干扰补偿的鲁棒滑模控制器
故系统是全局渐进稳定的。
3 仿真实验与分析
下面以双关节机械手为例,对所设计的方法进行仿真验证。机械手的重要参数如下:


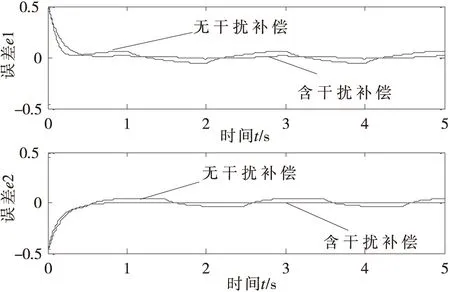
图2 关节角跟踪误差
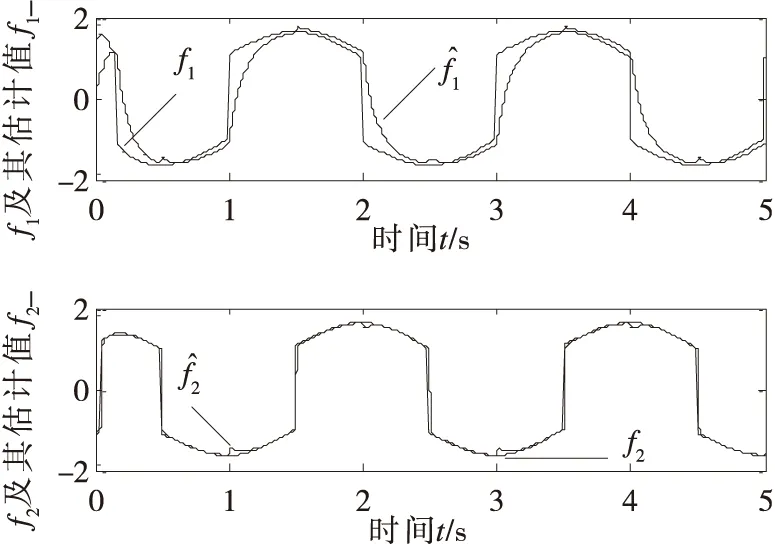
图3 不确定项的在线估计
由图2可知,采用非线性观测器补偿的机器人跟踪精度比无观测器时得到了明显的提高,后者在速度为零附近的误差较大,而前者则没有明显变化,有效地实现了零速跟踪。
图3给出了非线性观测器来观测系统总不确定项的效果。从图3可以看出,该方法均能有效辨识出两个关节的不确定项,关节2的辨识精度更高。
图4和图5分别给出了本文基于sigmoid函数新型趋近率的滑模控制SMC和传统滑模控制的控制输入,从图中可以明显看出,本文的方法有效地抑制了滑模控制存在的固有抖振现象,大大提高了跟踪性能。
总之,本文提出的方法能够实现2关节机器人的高精密跟踪。
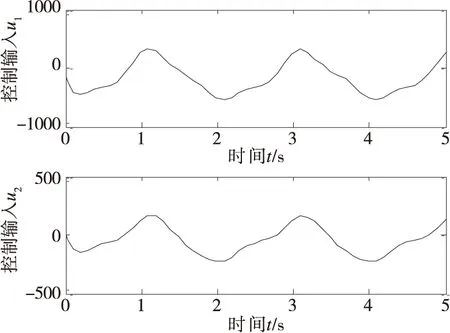
图4 本文方法的控制输入
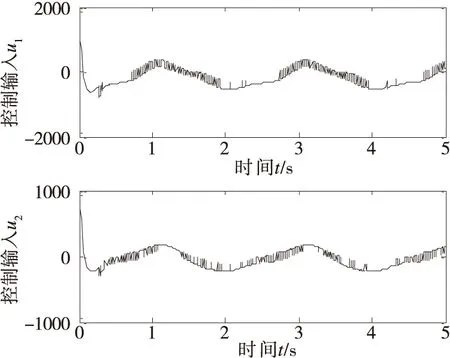
图5 传统SMC控制的控制输入
4 结论
机器人代替手工劳动是当前工业自动化的一个重要方向。本文以多关节机器人为研究对象,提出了一种利用非线性测器进行干扰补偿的不确定机器人滑模跟踪控制方法。该方法通过引入Sigmoid函数有效降低了传统滑模控制固有的抖振问题,提高系统的鲁棒性能;并利用非线性观测器实现系统不确定性的在线估计与补偿,进一步提高了系统的跟踪性能。最后,通过在2关节机器人的仿真实例验证了本文提出方法所具有的优越性。
[1] 昝鹏,颜国正,于莲芝. 基于自适应模糊PID控制的气动微型机器人系统[J].仪器仪表学报,2007,28(9):1543-1547.
[2] 昝鹏,颜国正,于莲芝. 基于神经网络PID控制的柔性微机器人系统[J]. 机器人, 2007,20(3):219-223,229.
[3] F G Rossomando, C M Soria. Design and implementation of adaptive neutral PID for non Linear dynamics in mobile robots[J]. IEEE Latin America Transactions, 2015, 13(4):913-918.
[4] Bong Seok Park, Sung Jin Yoo, Jin Bae Park, Yoon Ho Choi. A simple adaptive control approach for trajectory tracking of electrically driven nonholonomic mobile robots[J]. IEEE TRANSACITIONS ON Control Systems Technology, 2010, 18(5):1199-1206.
[5] 吴常铖,宋爱国,章华涛,等. 基于刚度模糊观测的假手反演控制策略[J].机器人, 2013,35(6):686-691.
[6] 梁浩,余跃庆.基于模糊控制的3R欠驱动机器人轨迹跟踪研究[J]. 组合机床与自动化加工技术,2015(5):91-94,103.
[7] Xiang Li, Chien Chern Cheah. Adaptive neural network control of robot based on a unified objective bound[J]. IEEE TRANSACITIONS ON Control Systems Technology, 2014, 22(3):1032-1043.
[8] 李艳,王勇,陈正洪. 滑模控制在并联机器人轨迹跟踪中的应用[J].组合机床与自动化加工技术,2008(9):45-48.
[9] 张晓光,赵克,孙力,等. 永磁同步电动机滑模变结构调速系统新型趋近率控制[J].中国电机工程学报,2011,31(24):77-82.
[10] 晁红敏,胡跃明,吴忻生.高阶滑模控制在非完整移动机器人鲁棒输出跟踪中的应用[J].控制理论与应用,2002, 19 (2): 253-257.
[11] Pliego-Jimenez Javier, A Arteaga Perez Marco. Adaptive position/force control for robot manipulators in contact with a rigid surface with uncertain parameters[J]. European Journal of Control, 2015, (22):1-12.
[12] 蒲明,吴庆宪,姜长生,等. 新型快速Terminal滑模及其在进空间飞行器上的应用[J].航空学报,2011,32(7):1283-1291.
(编辑赵蓉)
Disturbance Compensation Based Robust Sliding-Mode Tracking Control for Uncertain Robots
TANG Chuan-sheng1, LI Zhong-min2, LI Chao3
(1.School of Mechanical and Automotive Engineering, Nanyang Institute of Technology, Nanyang Henan 473004, China;2.Department of Electrical and Mechanical Engineering, Nanyang Industrial College, Nanyang Henan 473035, China)
The problem of trajectory tracking for uncertain robot system, which contains uncertain parameters and external distance, is researched in this paper. Combined with the system identification theory and sliding mode theory, a robot robust sliding mode control method was proposed with disturbance compensation in this paper. Nonlinear observer was used to estimate and compensate system uncertainties, and sliding mode control was used to enhance the robustness of the system. Then, a new rate with sigmoid function was used to suppress the intrinsic chatting phenomenon in the traditional sliding mode control. Finally, the effectiveness of the presented approach was validated by the 2-joint robot, which is not only effective solution to the traditional sliding mode control inherent chattering phenomenon, and the uncertainty of the system is robust to disturbances.
robots;sliding mode control;nonlinear observer
1001-2265(2016)07-0099-03DOI:10.13462/j.cnki.mmtamt.2016.07.028
2015-08-01;
2015-08-19
唐传胜(1982—),男,河南邓州人,南洋理工学院讲师,博士,研究方向为电机伺服系统驱动与控制,(E-mail)tcs111@163.com。
TH16;TG65
A
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
农业机械学报(2020年2期)2020-03-09
北京航空航天大学学报(2019年9期)2019-10-26
中华建设(2019年7期)2019-08-27
自动化学报(2019年6期)2019-07-23
北京航空航天大学学报(2017年6期)2017-11-23
自动化学报(2017年4期)2017-06-15
电子制作(2017年24期)2017-02-02
