分布式驱动电动汽车扭矩矢量控制仿真与验证(续1)
2016-08-20 08:36:14熊焱飞凌和平文婷王宁田果周小伟
汽车工程师 2016年10期
熊焱飞 凌和平 文婷 王宁 田果 周小伟
(比亚迪汽车工业有限公司)

电动汽车以驱动电机为动力源,能够实现布置形式和驱动结构的多样化,因其具有响应快、传动效率高、传动链短及易于实现电控技术集成等突出优点而成为了电动汽车研究的一个重要方向,因此以轮边电机为驱动源的分布式驱动电动汽车主动安全技术得到了广泛关注和研究。分布式驱动电动汽车由于采用4个独立的轮边电机做为动力源[1],能够根据汽车的运动状态独立分配驱动轮扭矩,在传统汽车只能靠制动来改变横摆扭矩的基础上,增加了驱动控制,可同时对汽车进行驱动和制动控制,快速产生整车所需要的横摆扭矩,使汽车主动安全性能达到最佳。文章通过Simulink软件建立整车稳定性控制模型,并验证控制模型的有效性,极大地提高了汽车主动安全性能。
1 传统ESP和电机扭矩矢量控制(TVC)功能原理简介
1.1 ESP控制原理
传统ESP通过传感器收集方向盘转角、横摆角速度及侧向加速度等信息输入电控单元,检测方向盘转角输入和实际行驶状态,一旦识别出汽车处于不稳定状态,立刻对制动系统和发动机管理系统等进行综合协调控制,来降低汽车横向滑移,防止在制动时车轮抱死、起步时打滑及汽车侧滑[2],同时因为整车有较大的制动力,汽车瞬间减速明显。当横向滑移导致过多转向时,对左前轮施加制动力,产生一个向外的横摆力矩,修正过多转向。ESP对过多转向的调节原理图,如图1所示。
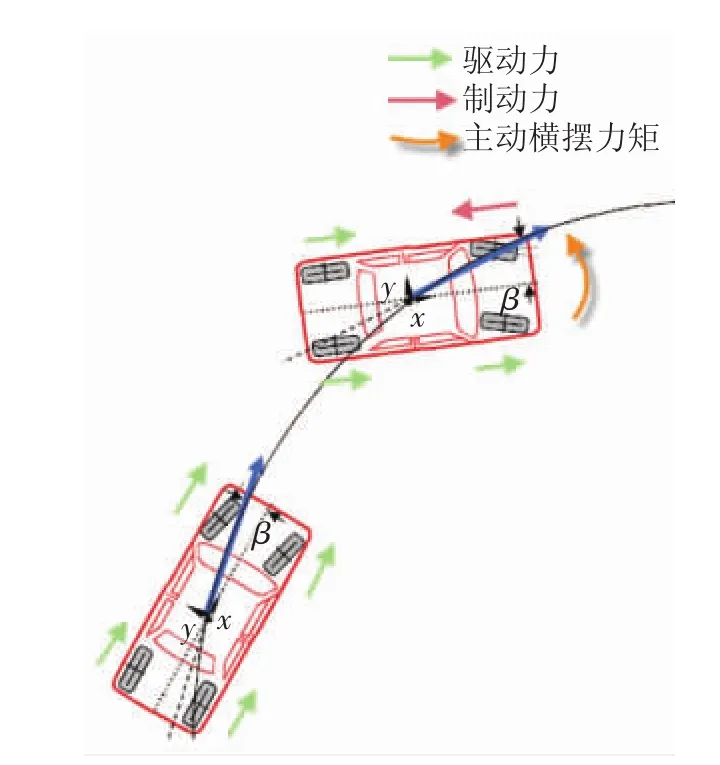
图1 ESP对过多转向的调节原理图
1.2 TVC功能定义
TVC控制原理是根据轮速、理想横摆角速度、传感器横摆角速度、侧向加速度及方向盘转角的输入,判断汽车是否处于转向不足或转向多度的情况,对安装在四轮的轮边电机进行扭矩调节,产生左右轮扭矩差,形成可控的主动横摆力矩,对将要发生失稳的汽车进行有效控制,使其快速进入稳定区,能有效提高汽车主动安全性能,同时修正过多或不足转向,提高过弯能力,实现TVC功能[3]。因为汽车纵向合力未发生变化,在TVC触发前后,车速不会有太大的变化。当过多转向时,对内侧轮增扭驱动,对外侧轮反向驱动,从而产生一个向外的横摆扭矩,短时间内达到修正过多转向的效果[4]。图2示出TVC对过多转向调节原理图,图3示出TVC功能硬件结构图。
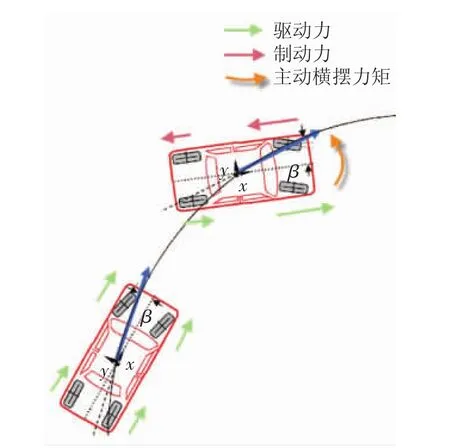
图2 TVC对过多转向的调节原理图
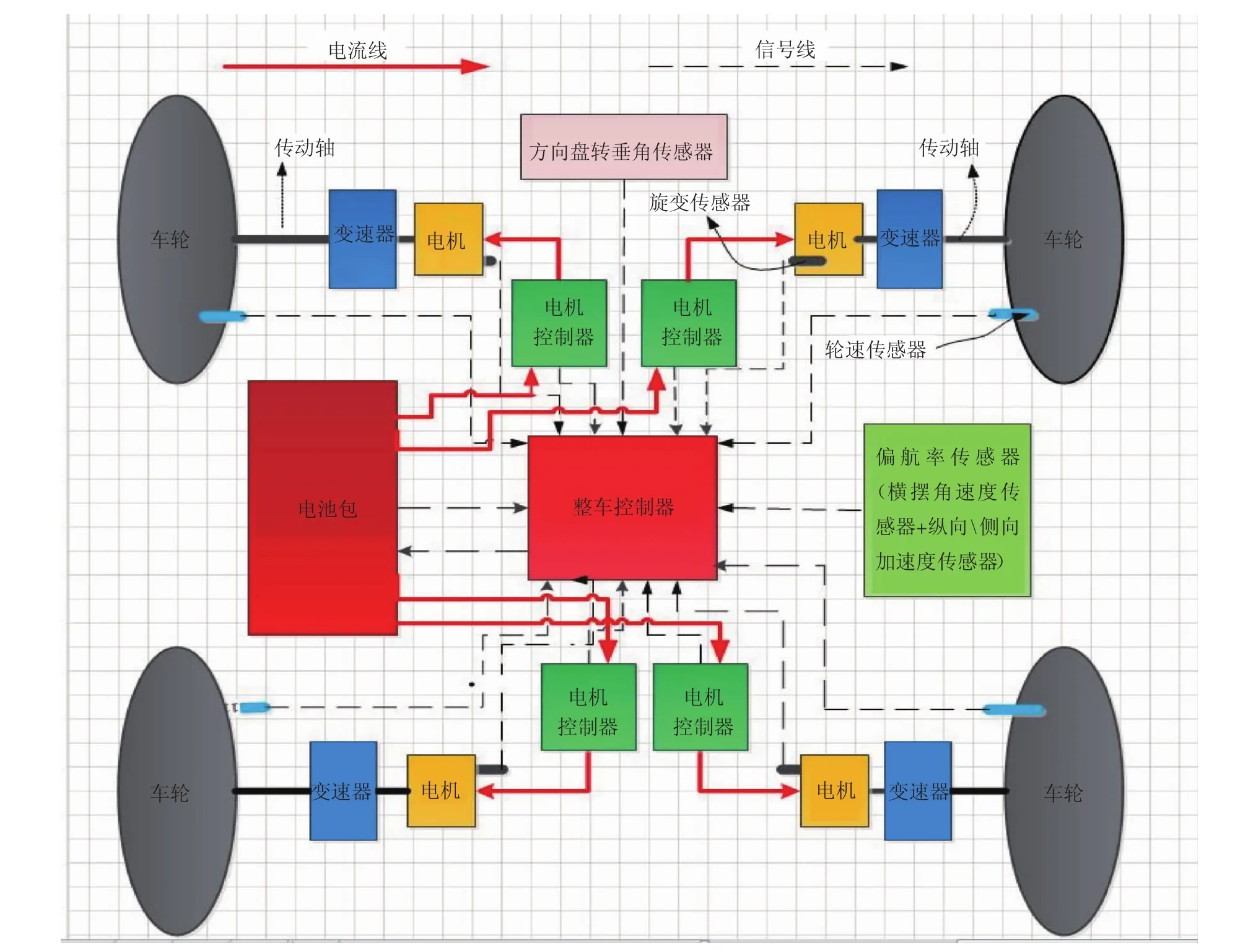
图3 TVC功能硬件结构图
2 整车CarSim建模及TVC模型
CarSim作为成熟的商用软件,具有自由度高、仿真精度高及运算稳定等显著优点。此外,它具有完整的驾驶员模型,用户可以方便地自定义不同工况的开/闭环仿真试验,并能通过3D动画的方式再现汽车对驾驶员、路面及空气阻力等外部输入的响应。图4示出CarSim参数输入界面,包括整车参数输入界面和轮胎参数输入界面,主要输入的参数包括:整车质量、质心位置、高度、迎风面积、风阻系数及测试的轮胎数据等。
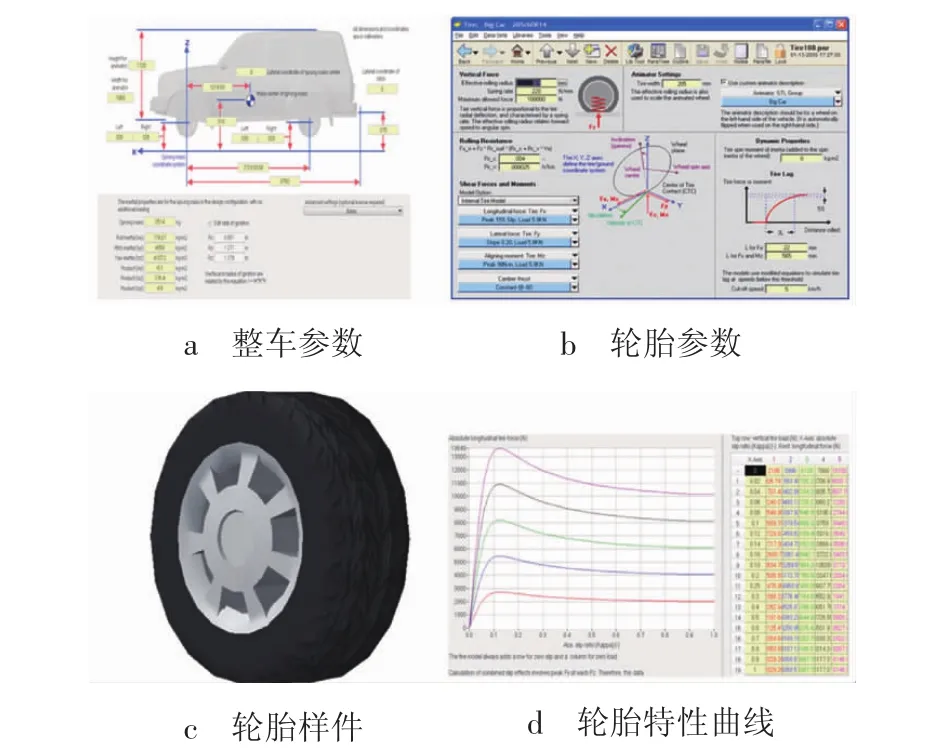
图4 整车CarSim参数输入界面
仿真的结果是否可信,最关键的一步就是CarSim整车模型是否准确,各项参数是否和实车参数设置一致。尤其是在做和操稳相关的仿真时,底盘、悬架及轮胎参数尤为重要,这些数据都必须是实车测试数据,因此本次仿真所需要的所有的关键建模参数都是通过实车做KC(K代表Kinematics,即不考虑力和质量的运动,而只跟悬架连杆有关的运动,C代表Compliance,即由于施加力导致的变形跟悬架系统的弹簧、橡胶村套及零部件的变形有关的运动)试验得到的。图5示出目标试验汽车做KC试验图,轮胎数据是通过轮胎供应商提供的轮胎测试数据,考虑到保密要求,关键测试数据不便于提供,这里仅提供部分整车参数数据,如表1所示。

图5 目标试验车悬架KC试验装置图
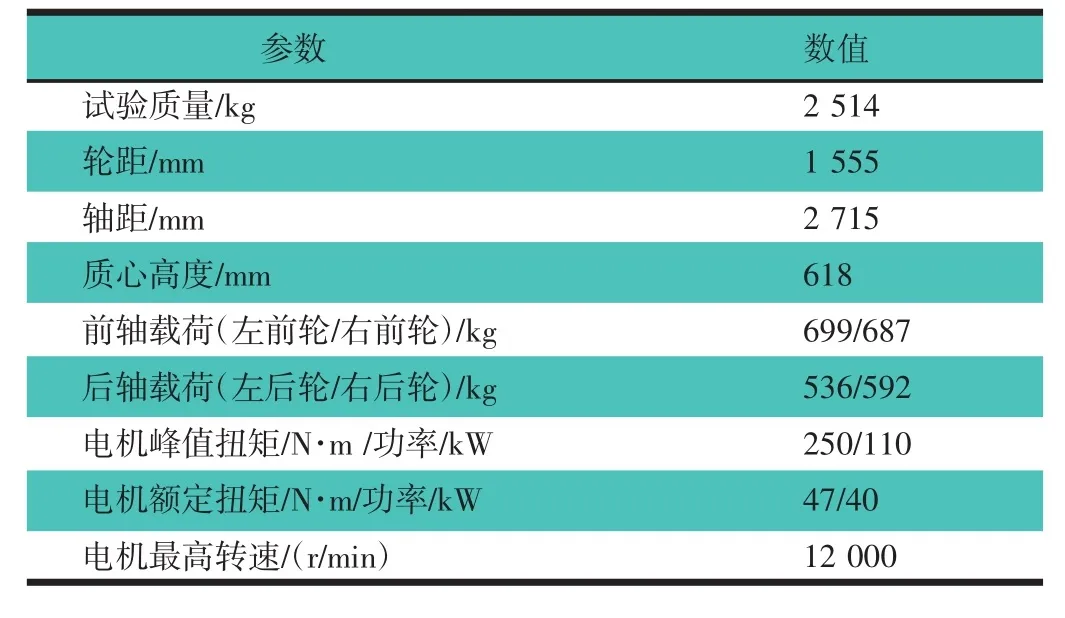
表1 部分整车基本参数
整车模型完成后,接下来就是TVC模型的建模,由于Simulink和CarSim具有良好的数据通信接口,因此在Simulink建立TVC模型有利于仿真的实时性和快速性。图6示出整车TVC模型截图,包括控制模型参数输入输出和参数估计模型。TVC输入信号为四轮扭矩,输出信号为方向盘转角、横摆角速度、质心侧偏角、侧向加速度及车速等。
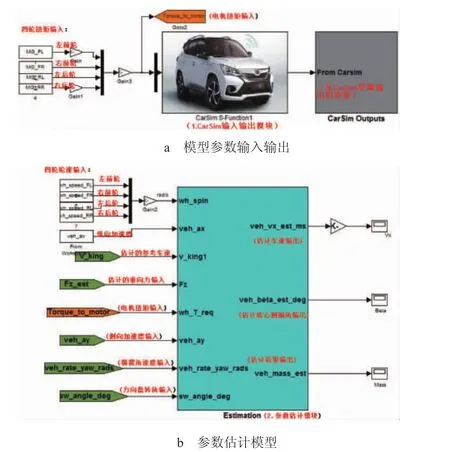
图6 整车扭矩矢量控制模型截图
3 TVC功能仿真验证
在完成整车建模及TVC模型后,需验证TVC模型的有效性。TVC模型的有效性需要在极限工况进行测试,具有一定的危险性,因此在条件不具备的情况下,建议不要轻易尝试。文章依据GB/T30677—2014《轻型汽车电子稳定性控制系统性能要求及试验方法》[5]进行验证。
汽车以(80±2)km/h的初速度滑行,确定方向盘转角(侧向加速度为0.3 g时所对应的转角为A,初始转角设定为1.5A,通过缓慢增加侧向加速度直到0.5 g,然后拟合出0.3 g对应的转角),以频率0.7 Hz正弦转方向盘转到1.5A转角,在第2个波谷停滞500 ms,然后回正。多次试验,第1次为1.5A,第2次为2A,第3次为2.5A……,如果6.5A≤300°,则最后1次试验选用6.5A与270°的最大值;如果6.5A≥300°,则最后一次试验选为300°。最好利用机器人进行试验以保证数据的准确性和重复性。
仿真验证主要对TVC干预过度转向性能、侧向稳定性及横摆响应性能进行考察。
具体试验方法参照FMVSS 126《汽车电子稳定控制系统》或文献[5]进行验证。正弦延迟试验工况的试验条件为:1)高附水泥、沥青及混凝土路面;2)关车窗和天窗;3)汽车载荷为半载;4)在平坦无障碍的试车场上进行;5)挡位 D;6)VDC-ON;7)车速为 80 km/h。
3.1 正弦延迟试验性能要求
图7示出正弦延迟工况性能图。正弦停滞转向输入完成后1 s(图7中T0+1)测得的横摆角速度不应超过方向盘转角方向改变后(在第1个峰值和第2个峰值之间)记录的第1个横摆角速度峰值(图7中的ω)的35%;正弦停滞转向输入完成后1.75 s测得的横摆角速度不应超过本次试验中方向盘转角方向改变后(在第1个峰值和第2个峰值之间)记录的第1个横摆角速度峰值(图7中的ω)的20%。
在转向起点(BOS)后1.07 s时,最大设计总质量不大于3 500 kg的汽车质心相对于其初始直线行驶轨迹的横向位移不小于1.83 m,最大设计总质量大于3 500 kg的汽车质心相对其初始直线行驶轨迹的横向位移不小于1.52 m。
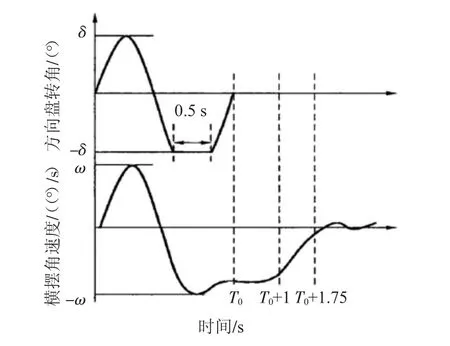
图7 正弦延迟工况性能图
3.2 仿真验证
按照正弦延迟工况要求,设置好仿真工况,将整车模型按照工况进行2组仿真,整车模型正弦工况试验图,如图8所示。
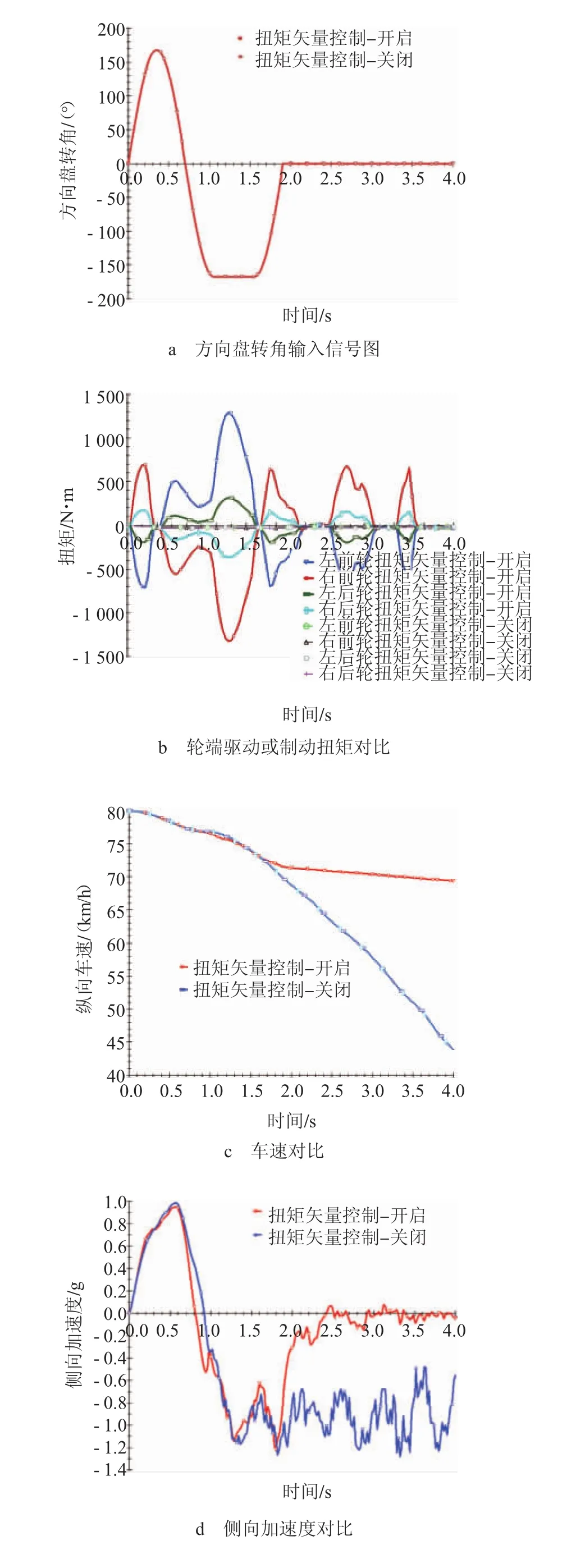
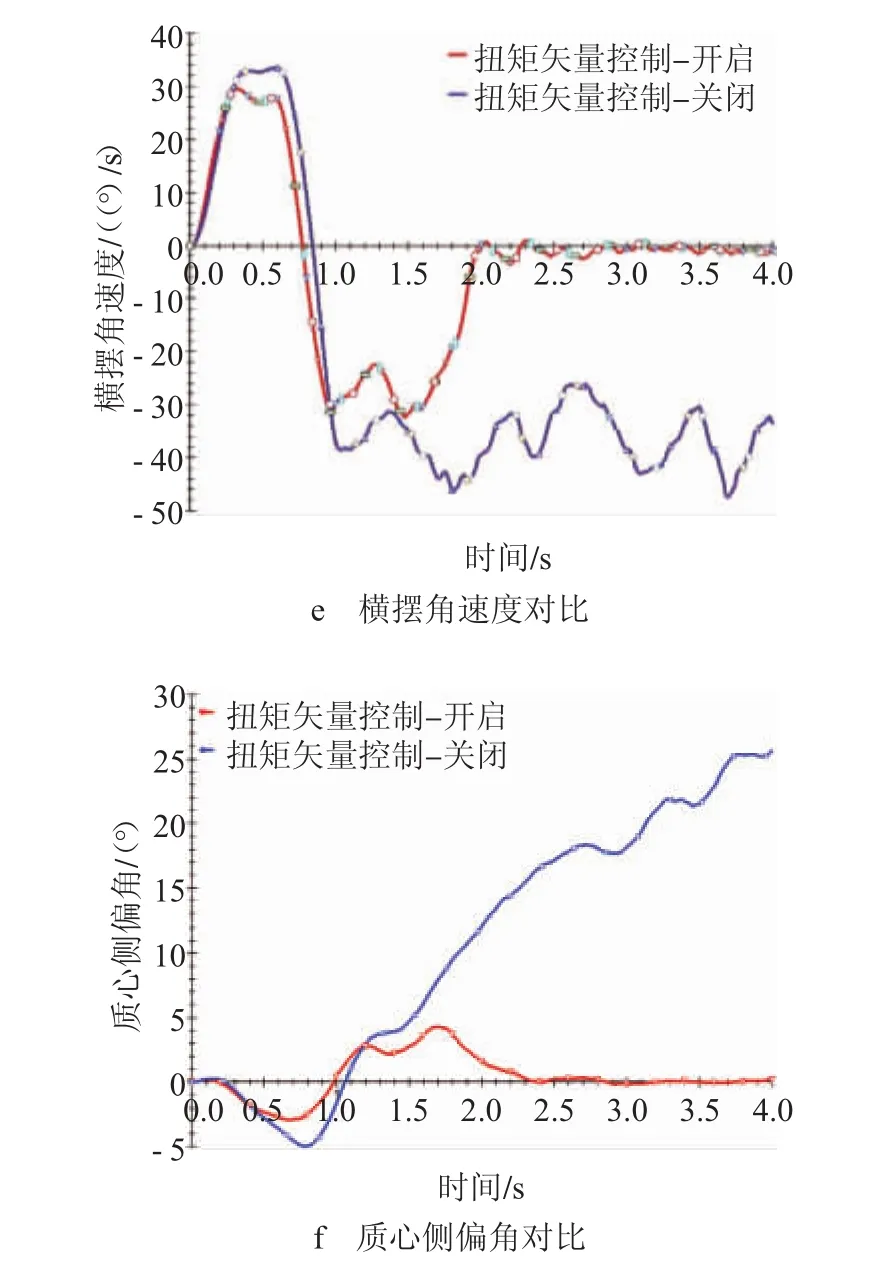
图8 整车模型正弦工况试验图
从图8a可以看出,开启TVC和没有开启TVC功能的汽车方向盘输入信号相同;从图8b可以看出,开启TVC稳定性控制功能的汽车四轮扭矩根据汽车状态的变化既有驱动也有制动,相比于传统ESP对单轮制动来说,该汽车将横摆扭矩分配到4个车轮,减小了单个轮边电机的负担,不至于使电机能力受限,同时电机相应加快,能使汽车快速进入稳定区;从图8c可以看出,开启TVC稳定性控制功能的车速下降幅度小且稳定,这是因为TVC触发前后纵向总扭矩值没有发生改变,改变的只是绕Z轴的横摆扭矩,没有开启TVC功能的汽车由于汽车失稳导致车速大幅下降[5],这在高速上是极其危险的;从图8 d~8f可以明显的看到,开启TVC稳定性控制功能的汽车侧向加速度、横摆角速度及质心侧偏角等在2 s左右都达到收敛,汽车趋于稳定,且横摆角速度满足上述正弦迟滞性能要求,即正弦停滞转向输入完成后1 s(图7中T0+1)测得的横摆角速度(-1.07(°)/s)没有超过方向盘转角方向改变后(在第1个峰值和第2个峰值之间)记录的第1个横摆角速度峰值(-31.2(°)/s)(图 7中的 ω)的 35%。正弦停滞转向输入完成后1.75 s测得的横摆角速度(0.36°/s)没有超过本次试验中方向盘转角方向改变后(在第1个峰值和第2个峰值之间)记录的第1个横摆角速度峰值(-31.2(°)/s)(图 7中的 ω)的 20%,说明有TVC控制的汽车能够有效快速地使汽车进入稳定区。没有开启TVC功能的汽车侧向加速度、横摆角速度及质心侧偏角基本都在方向盘改变后的波谷,即1.5 s后发散,说明汽车此时已经发生了侧滑,之后发生甩尾。从以上仿真结果可以看出,文章设计的TVC稳定性控制模型具有一定的有效性,可以通过实车进行功能验证。
(待续)
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
今日农业(2020年16期)2020-12-14 15:04:59
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
电测与仪表(2015年16期)2015-04-12 00:44:26