
基于类牛顿学习律的携行外骨骼系统控制*
2016-08-11 07:03杨秀霞杨智勇
计算机与数字工程 2016年4期
杨秀霞 王 亭 杨智勇
(1.海军航空工程学院控制工程系 烟台 264001)(2.海军航空工程学院7系 烟台 264001)
基于类牛顿学习律的携行外骨骼系统控制*
杨秀霞1王亭2杨智勇2
(1.海军航空工程学院控制工程系烟台264001)(2.海军航空工程学院7系烟台264001)
摘要为了提高系统的控制速度及精度,运用携行系统重复运动这一特性,根据类牛顿迭代学习律的理论,构造了时变的下肢外骨骼迭代学习算子,考虑了人机作用力。仿真结果表明了该方法的可行性及有效性。
关键词携行外骨骼系统; 类牛顿学习律; 人机作用力
Class NumberTP241.3
1 引言
“携行外骨骼系统”是一种新概念携行承载外骨骼系统,其将人的智能与机械腿的机器能量结合在一起。人作为整个系统的控制中枢,控制系统的行走方向和速度,可以完成人最擅长而机器却望其项背的那些任务;携行系统则承载人所背负的负荷,跟随人的运动[1]。
外骨骼的力控制、虚拟力矩控制等控制方法需要在每个时刻对系统动态方程及控制算法进行解算,没有充分利用人体运动的信息,这势必造成不必要的资源浪费,并且系统的动态响应过程也会存在相应的延迟,同时,虚拟力矩控制需要下肢外骨骼的精确质量属性,而摩擦、死区等非线性均会影响模型的准确性。在正常行走一段时间后,若根据人体行走的生物力学模型及穿戴者的一些信息,对外骨骼加入学习控制,则可减少人体及外骨骼的能量消耗。
学习控制可采用模型预测法、神经网络学习、迭代学习等方法,而其中迭代学习特别适于下肢外骨骼的重复运动学习,为此本文采用迭代学习控制,利用人体行走的这一重复过程,提高控制的速度和精度。一般的PID型迭代学习控制律,采用的学习因子是事先选定的常数,不能随着外骨骼特性的变化而调整,这就使迭代学习控制律无法得到令人满意的收敛速率。根据类牛顿迭代学习律的理论,可以构造出时变的迭代学习算子。结合下肢外骨骼的动力学方程,把类牛顿迭代学习律应用在下肢外骨骼的迭代学习控制中。
2 下肢外骨骼的类牛顿学习控制
文献[2]给出了如下定理。
用算子F:U→Y描述对象系统,其中U,Y都是Banach空间。当系统执行迭代运行时,在每个周期有yk(t)=f(uk(t)),k=0,1…。其中yk∈Y,uk∈U分别为第k个工作周期的控制器输出和系统对象输出。并假设每个工作周期都在有限时间区间[0,T]上进行。令yd为系统期望输出,则控制目标就是寻找控制解ud,使yd(t)=f(ud(t))。
考虑迭代学习控制律
uk+1(t)=uk(t)-L(uk(t))ek(t),k=0,1…,t∈[0,T]
(1)

定理1:F:U→Y在S(ud,r)={u∈U|‖u-ud‖
1) ‖L(u)‖≤β,u∈S(ud,r);
2) ‖F′(u1)-F′(u2)‖≤γ‖u1-u2‖,u1,u2∈S(ud,r);
3) ‖L(u)F′(u)-I‖≤δ<1,u∈S(ud,r)。
那么存在ε>0,对任何u0∈S(ud,r),上述迭代学习控制律收敛。收敛速率可以由下式估计:
与机器人迭代学习控制不同,下肢外骨骼的控制有人的干预,下面以摆动相为例,参考机器人的迭代学习控制[2~3],给出下肢外骨骼的时变迭代学习控制律。下肢外骨骼的动力学运动方程如下所示:
(2)
忽略电机的动态特性,令控制器输入信号u(t)=Ta,人机作用力Thm可采用弹簧-阻尼器装置模拟[4],即
(3)
则
(4)
方程(4)满足Lipschitz条件,即存在常数b>0,对等式
和
有不等式‖q1(t)-q2(t)‖≤b‖u1(t)-u2(t)‖。
携行系统要求人机之间的和谐相处,若外骨骼和穿戴者之间存在角度差,则会存在人机力,角度差越大,人的负重感越强,因此,系统的控制需要外骨骼快速跟踪人的运动。采用预测方法或在行走几个周期后,运用外骨骼的角度测量输出可估算出穿戴者的期望轨迹qd(t)。在每个行走周期,控制器输出控制转矩uk(t),t∈[0,T],可观测系统的输出yk(t)=qk(t),t∈[0,T],误差ek(t)=qk(t)-qd(t),t∈[0,T],k=1,2…。
将下肢外骨骼的动力学方程在第k个工作周期的轨迹附近线性化,得:

注意到上述线性时变系统的解,可以表示为Δq=F′(uk(t))Δu,由Δq(t)=qd(t)-qk(t)=-ek(t),根据上式,设计学习律:
其中,k=1,2…,初始值可以取为
则控制律与式(1)相同。
3 下肢外骨骼的迭代学习控制实现
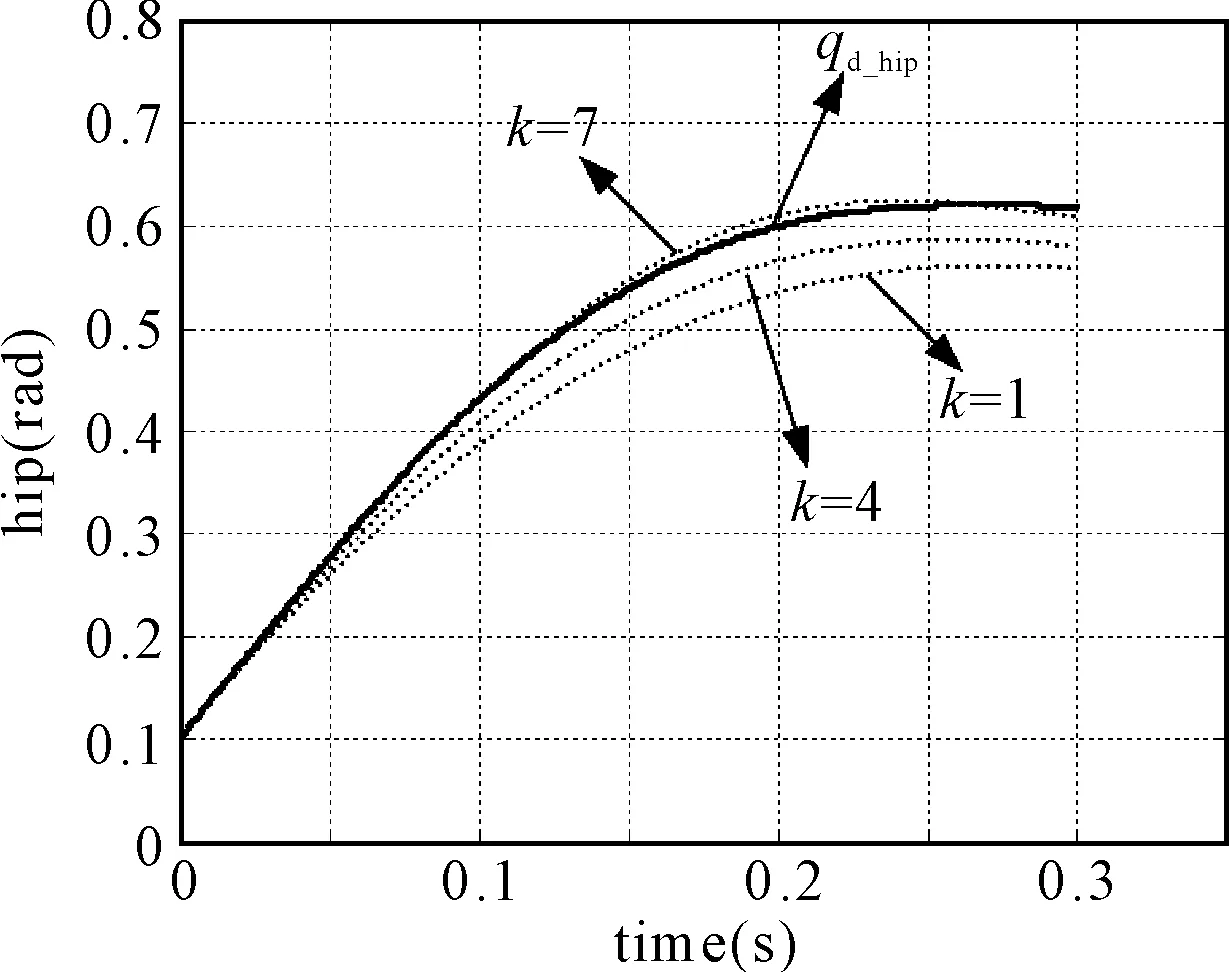
图1 髋关节的角度跟踪曲线
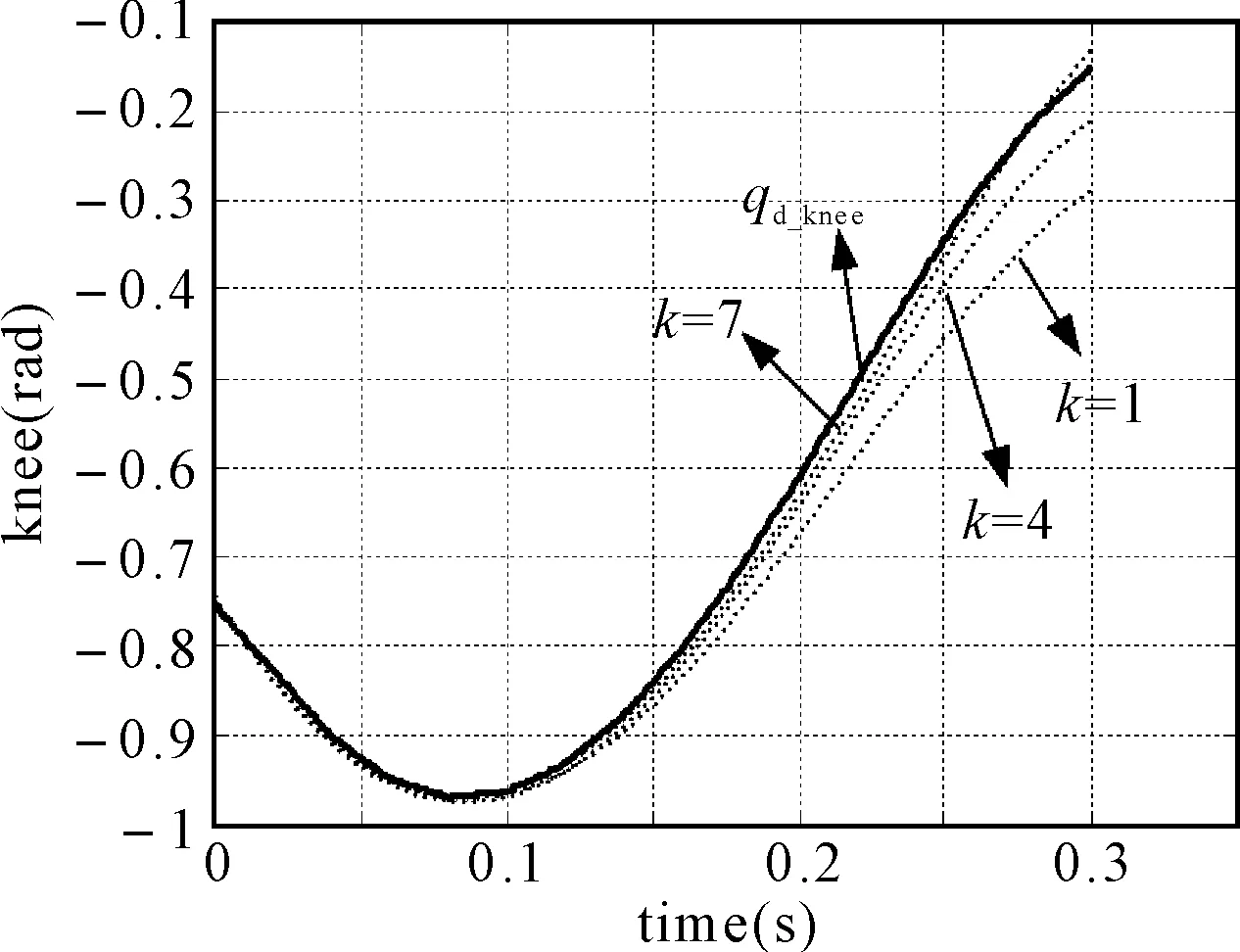
图2 膝关节的角度跟踪曲线
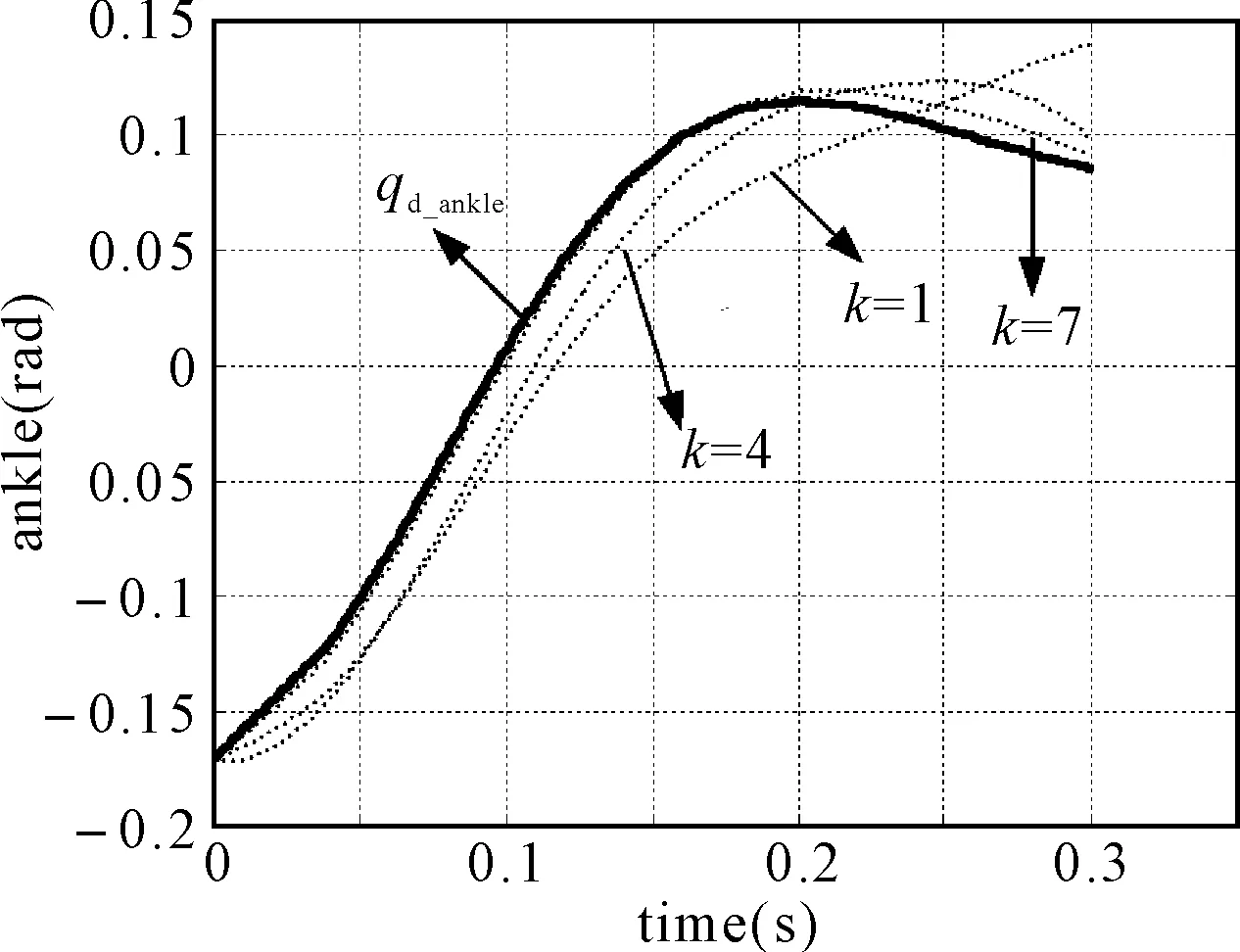
图3 踝关节的角度跟踪曲线
在本仿真实例中,对下肢外骨骼的摆动阶段进行仿真,经过7次迭代,实际被控系统输出达到期望的跟踪精度,各关节的收敛过程如图1~图3所示,学习结束后,人机力及驱动器施加的力矩如图4所示。从图中可以看出,虽然建立的外骨骼数学模型存在误差,但经过学习,外骨骼的角度输出能够跟踪穿戴者的角度输出,人机作用力非常小,能够实现外骨骼的携行。
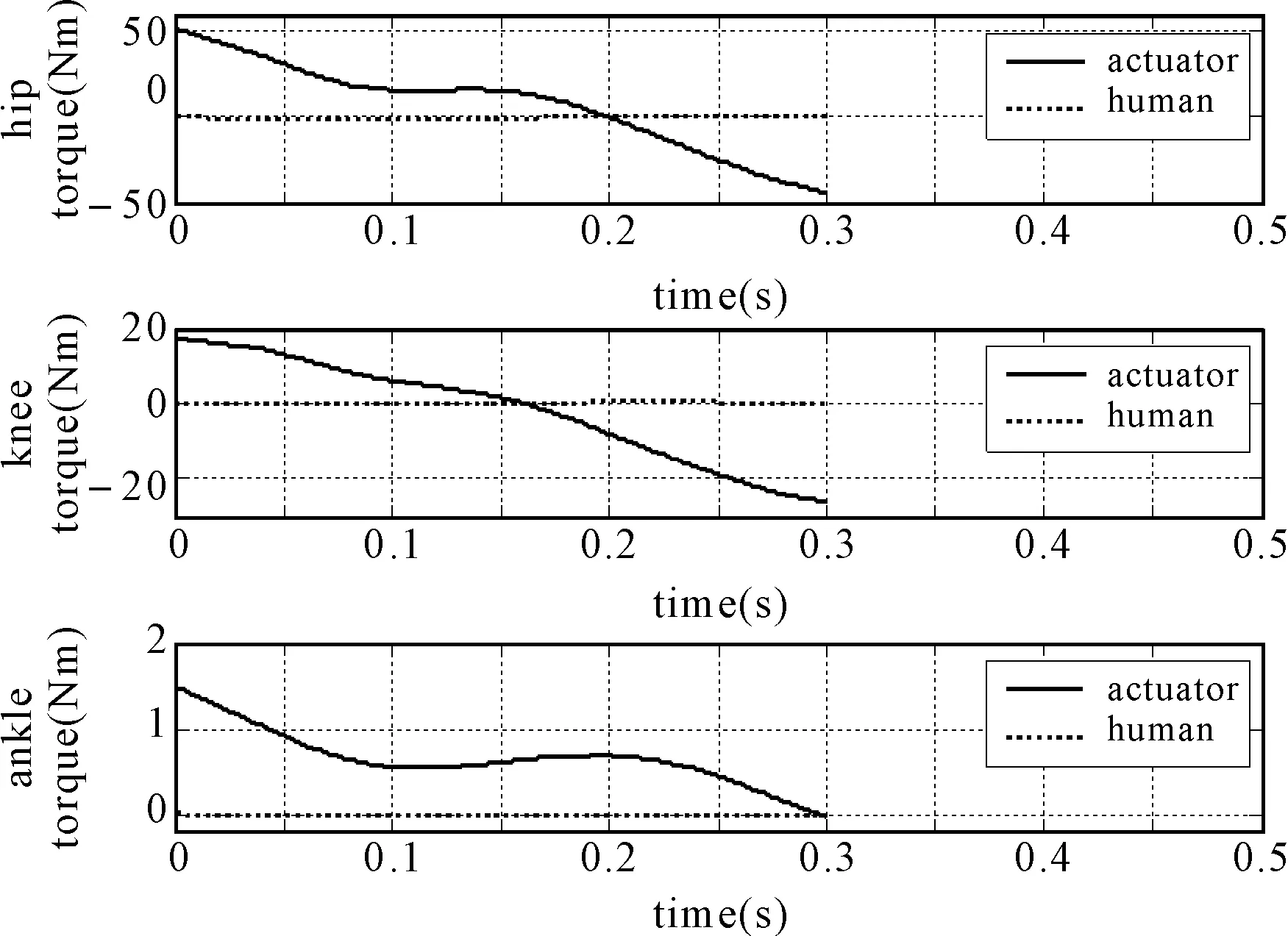
图4 操作者施加的力矩与驱动器施加的力矩
4 结语
为了克服虚拟力矩控制的不足,运用下肢携行系统重复运动这一特性,根据类牛顿迭代学习律的理论,构造出了时变的下肢外骨骼迭代学习算子,仿真结果说明了此方法的有效性。
参 考 文 献
[1] 陈鹰,杨灿军.人机智能系统理论与方法[M].杭州:浙江大学出版社,2006.
CHEN Ying, YANG Canjun. The Human-machine Intelligent System[M]. Hangzhou: Zhejiang University Press,2006.
[2] K. E. Avrachenkov. Iterative learning control based on quasi-Newton methods[C]//Proc. 1998 Conf. Decision and Control,1998:170-174.
[3] 丁学恭.机器人控制研究[M].杭州:浙江大学出版社,2006.
DING Xuegong. Research on Robot Control[M]. Hangzhou: Zhejiang University Press,2006.
[4] 陈峰.可穿戴型助力机器人技术研究[D].合肥:中国科学技术大学,2007.
CHEN Feng. Technology Research of Wearable Power Assist Robot[D]. Hefei: University of Science and Technology of China Press,2007.
收稿日期:2015年10月9日,修回日期:2015年11月23日
基金项目:总装预研基金(编号:9140A26020313JB14370)资助。
作者简介:杨秀霞,女,博士,副教授,研究方向:导航、制导与控制。
中图分类号TP241.3
DOI:10.3969/j.issn.1672-9722.2016.04.019
Carrying Extreme Exoskeleton Control Based on Quasi-Newton Iterative Learning Rule
YANG Xiuxia1WANG Ting2YANG Zhiyong2
(1. Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai264001)(2. Department of 7, Naval Aeronautical and Astronautical University, Yantai264001)
AbstractTo improve the control velocity and accuracy, using the characteristic of the carrying system repeat movement, according to quasi-Newton iterative learning rule, the time-varying iterative learning operator of the lower extreme exoskeleton is constructed. The human-machine interactive force is considered. Simulation results test the feasibility and validity of this method.
Key Wordscarrying extreme exoskeleton, quasi-Newton iterative learning rule, human-machine interactive force
