
无人机编队多分辨率指控建模分析*
2016-08-11 06:59:50王建宏刘晓光
计算机与数字工程 2016年4期
陈 淼 王建宏 刘晓光
(信息系统工程重点实验室 南京 210007)
无人机编队多分辨率指控建模分析*
陈淼王建宏刘晓光
(信息系统工程重点实验室南京210007)
摘要从功能角度对无人机进行建模,分别描述了无人机编队在高分辨率和低分辨率下模型功能及各功能模块之间的信息交互关系。首先分析了无人机个体单元的组成结构,从体系结构的角度分析了各功能模型,从控制论的角度分析了各组成结构之间的信息交互关系。然后分析了编队队形保持算法,并分析了队形控制信息交互处理流程。
关键词无人机编队; 多分辨率; 指控; 建模; 信息交互
Class NumberTP393
1 引言
无人机编队的指挥控制是近些年来研究的热点问题,研究内容涉及飞行控制、航迹规划、任务分配、决策制定、信息交互、任务下发等多个方面。无人机编队是指多架规格相同或相似的无人机为了有效完成任务,按照一定规则形成的队形,是为适应任务要求和任务分配而采用的多机飞行组织模式,包括队形的形成、保持和变换,无人机编队飞行可以扩大侦察视野及打击范围,提高作战效能[1]。
建模是对实际研究对象(装备/系统/体系)抽象的描述,描述方式通常包括数学、物理或逻辑等。建模是仿真的基础,是在对研究对象进行研究时以模型代替实际研究对象,以达到节省资源成本及安全高效的目的。早期的建模其研究对象主要为具体的实体装备,如无人机,对实体装备的建模研究较多运用微分方程描述物体的运动学及动力学过程,这种用数学或物理的方法构建的模型最大的优点是直观、易于理解,但从功能的角度来讲,装备的诸多功能,如火控、综合航电、操纵系统、任务规划以及与其他战斗单元之间的协同作战、信息交互等,难以完全用微分方程描述。而且伴随着网络技术和信息技术的较快发展,战场上双方的对抗呈明显的体系化特征,不再仅仅局限于装备平台的能力或具体哪几方面的指标,而更多的是各装备平台在共同的作战任务框架下,通过协同协作,构成强大的作战体系,其复杂性体现在体系边界的模糊性、环境的不确定性及整体架构的涌现性和对抗性等[2]。因此,在这样的背景下,传统的用微分方程建立的动力学模型无法有效描述装备作战单元内部各功能模块之间的信息交互关系以及作战单元之间的信息交互与指挥控制关系。
2 问题描述
无人机编队是一个由多个无人机单元组成的系统,从指挥控制的角度讲,更关注编队整体的作战效能,即由多架无人机协同呈现出的体系的涌现性。那么在这种情况下,将每架无人机单元看作是不可再分的描述对象,分析编队内部各单元之间的信息交互关系,从实体行为的角度描述无人机单元。若需要分析无人机单元的运动机理以及任务规划、指控等问题时,再将无人机单元看作不可再分的整体显然无法满足需要,需要从功能实现的角度详细分析无人机各功能模型,以及各功能模型之间的信息交互,从而理解无人机工作原理,构建无人机单元个体的详细模型。以上描述即多分辨率建模问题[4~5]。
无人机编队由多个个体单元组成,根据不同的规划,执行任务的形式也不同,有的个体单元是以个体的形式单独执行任务,有的则要以编队成员的形式共同参与任务。另一方面,对于具体的个体单元,有些任务时刻是单独执行任务,有些任务时刻是以参与编队形式执行任务。因此,传统的单一分辨率建模方式难以灵活描述编队模型[5],需要根据编队状态的变化,运用多分辨率建模思想,准确清晰地描述。
本文以无人机编队为研究对象,从多角度研究无人机个体单元及编队整体建模描述及彼此之间信息交互关系、运动状态控制等信息。
3 无人机编队多分辨率建模分析
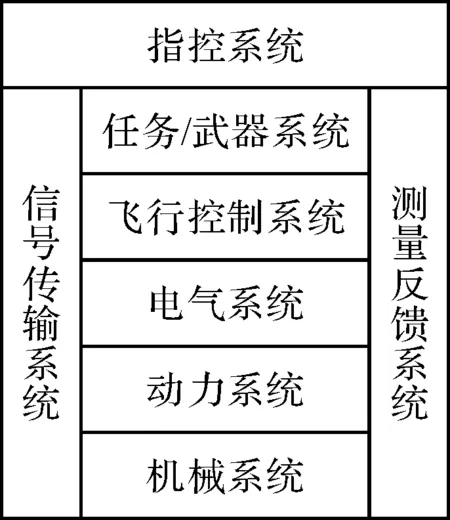
图1 无人机功能模型
关于无人机模型,自无人机问世以来这几十年,已有相当丰富的研究成果。但大多数成果都聚焦于运动学模型以及相应的飞行控制方面的研究[6~10]。但从指控的角度来讲,更需要从功能实现的角度来分析无人机模型,按照多分辨率思想,将无人机按层级划分成若干个功能模块,如图1所示。
图中,将无人机按功能分为机械系统、运动系统、电气系统、飞行控制系统、任务/武器系统、信号传输系统、测量反馈系统及指控系统几个功能模块。
首先,飞机是由若干机械零部件构成,通过组装成为一个整体,构成了整架飞机的机械系统,通俗讲也可称为飞机外壳。但是,这个外壳是静止的,无法运动的,就像一台没安装任何软件系统的计算机,没有任何使用价值。那么,让飞机运动起来,就应当有相应的动力系统,如发动机、舵机等,驱动飞机完成滑跑、爬升、平飞、转弯、降落等运动模式。其次,动力系统的启动与执行各类动作,如发动机推力的增减、舵面的摆等,需要电气系统来驱动。在此基础上,可设计控制系统来控制飞机的精确运动,达到对控制指令(如高度、速度、航向等)稳、快、准地跟踪。然后,便可执行相应的任务,即设计任务规划/武器管理系统,对任务的执行情况进行管理,由此便构成了单个UAV的指控系统功能模型。以上各系统之间通过信号传输系统进行信息的传递与交互,指控系统通过信号传输系统将指令发送相应的功能模块,同时,各功能模块又将自身的运行状况通过测量反馈系统传输给指控系统。这样,就构成了装备级系统(体系)结构,如图2所示。

图2 无人机多分辨率体系架构
图2从体系结构的角度分析了无人机的功能模型。按功能实现,将无人机模型分为支撑层、执行层和指控层三个层级,这实际上也是多分辨率建模思想。支撑层包含了实现飞机正常飞行所需的功能模块,使飞机就可以进行常规的机动飞行。执行层主要负责系统的任务指令的接收、解算、下达,以及武器装备的使用等,指控层负责决策制定、任务规划及分发。这三个层级构成了飞机的多分辨率指控功能模型,飞机执行任务也正是靠着这个架构去实现。那么在执行任务过程中,信息的交互也是时刻在进行着,各模块之间通过信号传输进行信息的交互,通过信息的交互保障任务顺利进行。各功能模型(模块)之间的信息交互关系如图3所示。
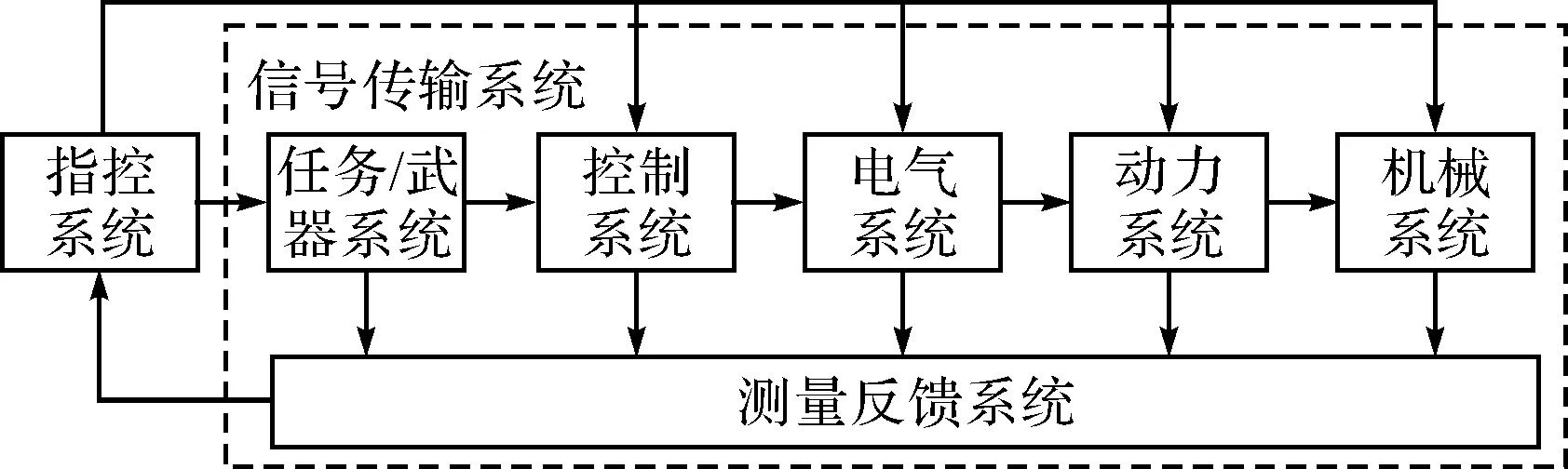
图3 功能模型信息交互关系
图3所示的系统信息交互关系与控制论中的控制回路比较相似,控制指令与测量反馈的实际输出量的偏差量通过控制器解算后成为驱动指令,驱动被控制系统运动,以求被控系统最终的输出对控制指令的跟踪能够符合“稳、快、准”的要求,即系统在外部激励的作用下,暂态响应过程要平稳,不能出现振荡发散现象;系统输出的调节时间要尽可能短;系统输出对外部激励的跟踪误差要尽可能小。那么,为达到上述要求,各功能模型之间需不断进行相应的信息交互,支撑层各功能模型通过测量反馈系统向指控层报告当前状态,机械系统、动力系统、电气系统属硬件设施,主要向指控层报告自身的工作状态,如发动机推力状况、全机电缆(光缆)连通状况,是否出现机故障等;控制系统属软件设施,主要向指控层报告飞机当前的飞行参数,如高度、速度、位置、姿态、航向等;任务/武器系统上报当前任务完成情况及武器使用情况。反过来,指控层的指令可以逐级下发,也可以越级下发,逐级下发可减轻指控系统的计算量,将任务识别的功能交给任务系统,但这样也使得信息计算量和交互量增加,越级下发可减轻信息计算量和交互量,如飞行控制类指令,可直接下发给控制系统,控制飞机按指令飞行。
4 无人机编队指控模型分析
无人机编队控制结构主要有集中式、分散式和分层混合式三种。三种控制结构均是通过各成员之间的信息交互实现队形的形成、保持与变换。以集中式控制结构为例,分析编队指控过程信息交互关系。集中式即长僚机模式,编队中,先确定其中某个成员为长机(Leader),其余均为僚机(Follower)[8,10]。为实现编队飞行及任务的执行,长机与僚机之间需进行信息交互,如图4所示。
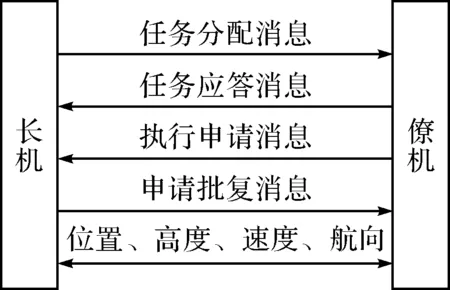
图4 长机与僚机之间信息交互关系
从多分辨率角度来讲,图4描述的指控模型分辨率要低于前述模型的分辨率,图中把每架飞机个体看作一个整体模型,描述各飞机之间的信息交互,而不是每架飞机内部各功能模块之间的信息交互。首先,编队在巡航中应保持一定的队形,那么长机与僚机之间应实时交互位置、高度、速度、航向等信息。从飞行控制角度来讲,长机应将自身的飞行参数,包括位置、高度、速度、航向等,发给僚机,僚机根据队形及编队规则,确定自身当前的飞行参数,与实际飞行参数对比,修正飞行航迹,也需将自身飞行参数发送给长机,便于长机下达修正指令,一般来讲,飞行参数的交互频率通常在秒级。然后,在编队队形保持的前提下,长机与僚机之间交互任务消息,僚机的任务指令由长机下达,接到任务指令后需向长机发送应答消息,如自身出现非正常状况,如发现敌情、机械故障等,可主动向长机发送任务执行申请消息,长机接收后做出决策,发送申请批复消息。另外,需要注意的是,一旦长机与僚机编队解除,那么,编队聚合模型也解聚为每架飞机个体的模型。
4.1无人机编队队形相对运动分析
前文讲述过,各飞机个体单元之间的信息交互中,控制信息属最低层的交互信息,也是保持编队飞行的基本条件。下面以长机-僚机双机编队为例,研究无人机编队过程中控制信息的交互关系。长机与僚机在地球惯性系下的运动态势如图5所示。

图5 双机编队运动平面示意图
图中,vl和vf分别为长机和僚机的速度,φl和φf为航向,d为双机实时距离,x和y分别为双机平等于航向距离及垂直于航向的距离。由图中可看出,编队飞行保持队形完整,平等航向距离x及垂直航向距离y应当保持一致。则双机的速度矢量应保持一致,包括速度大小和航向。经上述分析,得出双机平面位置变化关系,即运动方程为
(1)
进一步分析双机平等航向距离和垂直航向距离的关系为
(2)
两式整理可得
(3)
4.2无人机编队信息交互分析


图6 双机个体单元控制层面信息交互
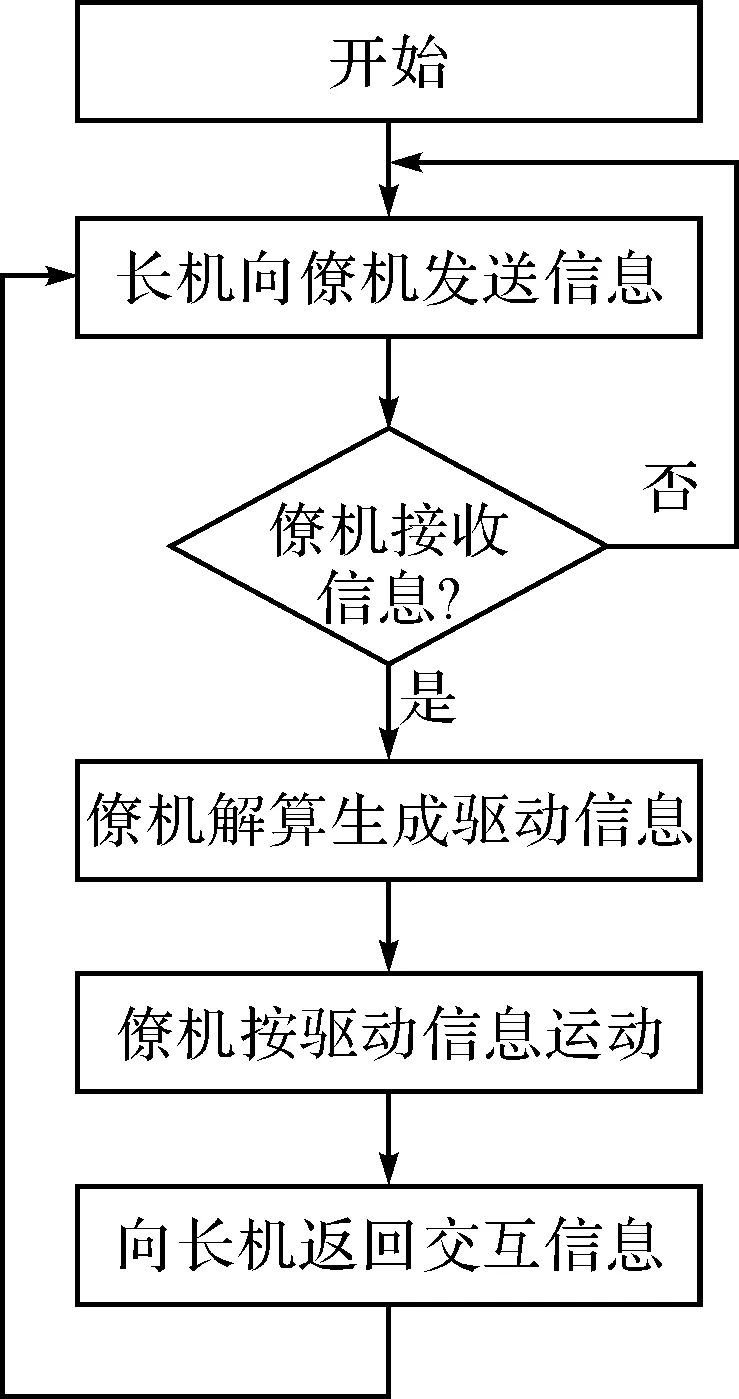
图7 信息交互处理流程
图6从飞行控制的角度分析了长机与僚机个体单元之间的信息交互过程及双机编队飞行控制原理。首先由长机将控制层信息发送给僚机,僚机接收控制信息后,根据式(3)控制算法,生成驱动指令,驱动飞机运动。驱动指令一般指电气信号,驱动动力系统,如油门舵机、气流舵面(升降舵、方向舵、副翼舵等)舵机等,实现飞机六自由度运动。另一方面,僚机将自身的飞行控制信息传递给长机,与长机发出的控制信息进行对比,再运动控制论方法设计控制律,使僚机按控制指令飞行,以保持编队队形。无人机飞行处于运动状态,位置不断变化,因此,指控模型之间的信息交互也要通过数据信息链保持实时交互[11]。信息交互处理流程如图7所示。
图中从软件处理流程的角度描述了编队个体成员之间的信息交互模型。该模型把个体单元当作一个独立的模型,其分辨率低,图3中描述的个体单元内部信息传输模型。
5 结语
本文以无人机编队为研究背景,以多分辨率指控过程中信息交互关系为研究对象,从多角度详细分析了无人机个体单元组成结构,不同功能结构模型之间的信息交互关系;分析了编队队形控制方法,个体单元之间的信息交互关系,模型之间信息交互处理流程,以及各分辨率模型描述信息等,为战场态势推演构建了一定基础。在今后的研究中,还是需进一步细化,将装备级模型机理细化到逻辑描述能够建立良好的衔接,使得顶层逻辑结构设计和底层物理学模型能够结合得更为紧密。
参 考 文 献
[1] 邓亮.无人机编队飞行模型的建立与短时记忆控制[D].重庆:重庆大学,2011:8-10.DENG Liang. Mathematical Model and Short Memory-based Controller Design of Multi-UAVs[D]. Chongqing: Chongqing University,2011:8-10.
[2] 杜伟,吴从晖,杜正军,等.基于指控链的作战体系网络建模分析[J].火力与指挥控制,2014,39(11):93-96.
DU Wei, WU Conghui, DU Zhengjun, et al. Operational System Network Modeling and Analysis Research Based on C2_Link[J]. 2014,39(11):93-96.
[3] 杨慧杰.基于战斗队形的坦克连多分辨率建模方法研究[J].中国电子科学研究院学报,2013,8(2):134-137.
YANG Huijie. Research on the Multi-Resolution Modeling Method of the Tank-Company Based on Combat Formation[J]. Journal of China Academy of Electronics and Information Technology,2013,8(2):134-137.
[4] 李兴兵,谭跃进,杨克巍.基于多分辨率建模的坦克编队作战效能分析[J].系统仿真学报,2007,19(20):4776-4790.
LI Xingbing, TAN Yuejin, YANG Kewei. Operational Effectiveness Analysis of Tank Formation Based on Multi-resolution Modeling[J]. Journal of System Simulation,2007,19(20):4776-4790.
[5] 李京伟.多分辨率建模在航母战斗群作战仿真中的应用研究[J].系统仿真学报,2013,25(8):1924-1929.
LI Jingwei. Research on Application of Multi-resolution Modeling in Carrier Combat Group Operation Simulation[J]. Journal of System Simulation,2013,25(8):1924-1929.
[6] 曹宇,吴森堂.飞行器自主编队鲁棒控制系统的设计[J].内蒙古大学学报(自然科学版),2014,45(1):98-104.
CAO Yu, WU Sentang. A Design of Robust Control System for Aircrafts Autonomous Formation[J]. Journal of Inner Mongolia University(Natural Science Edition),2014,45(1):98-104.
[7] 申振晴,张斌,龚昂,等.无人机着舰引导信息处理处理方法研究[J].电光与控制,2012,19(11):13-16.
SHEN Zhenqing, ZHANG Bin, GONG Ang, et al. Research on Information Processing for Carrier Landing Guidance of UAVs[J]. 2012,19(11):13-16.
[8] 王争,何玉庆,韩建达.多无人直升机的相对动力学建模方法及其编队控制[J].控制理论与应用,2011,28(1):108-112.
WANG Zheng, HE Yuqing, HAN Jianda. Relative dynamic modeling and formation control of multiple unmanned helicopters[J]. Control Theory & Applications,2011,28(1):108-112.
[9] 陈天立,周超,周绍磊,等.面向协同突防的无人飞行器自动编队控制[J].电光与控制,2014,21(5):58-62.
CHEN Tianli, ZHOU Chao, ZHOU Shaolei, et al. Automatic Formation Control of UAVs Toward Cooperative Penetration[J]. Electronics Optics & Control,2014,21(5):58-62.
[10] 林金永,李刚,孙圣和,等.自主编队飞行大系统的建模研究[J].系统仿真学报,2007,19(16):3631-3633.
LIN Jinyong, LI Gang, SUN Shenghe, et al. Modeling Investigation in Large Scale System of Autonomous Formation Flying[J]. Journal of System Simulation,2007,19(16):3631-3633.
[11] 黄强,李有才,刘茂立.数据链对舰艇编队作战指挥效能影响分析[J].舰船电子对抗,2010,33(6):74-80.
HUANG Qiang, LI Youcai, LIU Maoli. Analysis on The Influence of Data Link on Operation Command Effectiveness of Ship Formation[J]. Shipboard Electronic Countermeasure,2010,33(6):74-80.
收稿日期:2015年10月3日,修回日期:2015年11月26日
作者简介:陈淼,男,工程师,研究方向:复杂系统建模仿真与效能评估。王建宏,男,博士后,副教授,研究方向:系统辨识。刘晓光,男,高级工程师,研究方向:指控系统仿真。
中图分类号TP393
DOI:10.3969/j.issn.1672-9722.2016.04.010
Analysis on Multi-resolution Command and Control Model for Unmanned Aerial Vehicle Formation
CHEN MiaoWANG JianhongLIU Xiaoguang
(Science and Technology on Information Systems Engineering Laboratory, Nanjing210007)
AbstractThe problem of formation modeling for unmanned aerial vehicle is studied in this paper. The information included in formation model with higher revolution and lower revolution are separately described, and the information interaction between function models are also separately described. Firstly, the framework of UAV unit are analyzed, and every function model and the information interaction between each other are analyzed within system architecture as well. Then, the algorithm for keeping formation in order designed above is analyzed. Furthermore, the information interaction for keeping formation in order is also analyzed.
Key Wordsunmanned aerial vehicle formation, multi-resolution, command and control, model, information interaction
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:26
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
中国外汇(2019年17期)2019-11-16 09:31:06
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
人民论坛(2016年22期)2016-12-13 10:20:24
中国市场(2016年27期)2016-07-16 04:40:01
现代交际(2016年12期)2016-07-09 02:45:50
电脑知识与技术(2016年6期)2016-06-06 14:22:18
现代防御技术(2014年6期)2014-02-28 18:26:29
