
基于机载LiDAR点云的道路点滤波提取方法研究*
2016-08-11 07:04:13李武奇
计算机与数字工程 2016年4期
关键词:滤波
李武奇 袁 磊
(1.湖北文理学院数学与计算机科学学院 襄阳 441053)(2.中国地质大学(武汉)计算机学院 武汉 430074)
基于机载LiDAR点云的道路点滤波提取方法研究*
李武奇1,2袁磊1
(1.湖北文理学院数学与计算机科学学院襄阳441053)(2.中国地质大学(武汉)计算机学院武汉430074)
摘要提取出道路地面点对于从机载LiDAR数据中提取地物有重要意义,论文提出了一种滤波方法提取道路地面点。首先,通过LiDAR数据中的道路特征的高程值进行区域分割,保存粗略数据;然后再根据LiDAR数据中的反射强度进行第二次滤波,超出反射强度某阈值的点划分为非地面点,剔除此部分点;第三次对已提取出的点进行分析,根据道路点密集的特征剔除周围反射强度符合阈值但形状稀疏的孤立点。实验结果表明该算法对地面点的提取效果较好,具有一定的实用性。
关键词LiDAR数据; 滤波; 高程值; 反射强度; 剔除
Class NumberP23
1 引言
激光LiDAR点云数据的滤波过程主要是基于若干相关信息构建判别规则(也称作假设条件),然后根据这些判断规则,从LiDAR点云数据中判断出地物点、非地物点,并将非地物点滤除,获得地面点[1]。目前,从原始数据当中提取出地面点的算法已经很多,其中一些算法在ISPRS的报告中也进行了描述和比较。在2000年Vossleman提出的连续地面中基于坡度的算法[2],该算法基本思想是:地面引起的坡度变化小于地物的坡度变化;对于一个LiDAR数据地面点来说,它和地物点之间形成的坡度大于其与周围地面点形成的坡度值;殷国伟等在2010年在Vossleman的基础上提出改进,首先根据激光的回波次数和反射强度信息进行滤波,经过初步滤波之后根据角度限制法则和窗口移动法进行地面点提取工作,并使用不同地形特征的数据进行了试验[3]。2009年,PoonamS.Tiwari[4]等结合了IKONOS遥感数据和三维激光LiDAR数据实现道路的自动化提取。2009年,张皓[5]等提出了虚拟格网的概念,将虚拟格网与坡度滤波算法结合,进行激光LiDAR数据的滤波,该方法避免了点云数据内插或平滑过程中造成信息的损失。同年,苏伟[6]等对移动窗口滤波法进行改进,提出了一种基于多级移动曲面的拟合滤波法。另外还有渐进三角网滤波法,例如Axelsson提出的基于渐进三角网(TIN)的加密滤波算法[7]。此后,2009年,李夲[8]等将渐进三角网法与区域增长法融合,提高了滤波精度;何正斌提出了一种对非地面点剔除算法[9],该算法将点云数据中的地面数据和非地面数据分离。2010年,黄燕[10]等对TIN网的种子点选择进行了改进,提出一种最小残差法和移动窗口法相结合的选点方式。2011年,曾静静[11]等提出了一种基于LiDAR回波信息提取道路的方法。针对以上算法的局限性和适用范围限制,本文提出一种结合点云高程强度滤波的提取方法来提取路面点,最后根据道路的特征进行分析剔除部分噪点,可以达到良好的效果。
2 滤波算法描述
2.1数据可视化
LiDAR数据原始格式为.las格式,但本文实验数据把格式转换为.txt格式,其中字段共由以下七个字段构成,其分别代表意义如表1所示。

表1 LiDAR数据字段示例
本文LiDAR数据可视化主要有以下几个步骤:
1) 读取遍历LiDAR数据得到各字段最大值最小值Xmax、Xmin、Ymax、Ymin、Zmax、Zmin、Imax、Imin、Rmax、Rmin、Gmax、Gmin、Bmax、Bmin。
2) 将空间坐标数据归一化,首先按照式(1)将X、Y、Z归一到-1~1(OpenGL绘图坐标范围)之间,其中XN为原始数据,Xn为处理后的数据:
(1)
3) 将RGB数据归一化,同样按照式(2)将R、G、B归一到0~255(标准RGB)之间,RN为原始数据,Rn为处理后的数据:
(2)
4) 利用OpenGL绘图显示LiDAR数据。
2.2滤波提取算法
滤波算法第一步通过LiDAR数据中的高程值进行初步筛选;然后再根据LiDAR数据中的反射强度进行第二次滤波筛选出反射强度符合阈值的点划分地面点;第三次对已提取出的点进行距离分析,剔除孤立点。算法主要流程图如图1所示。
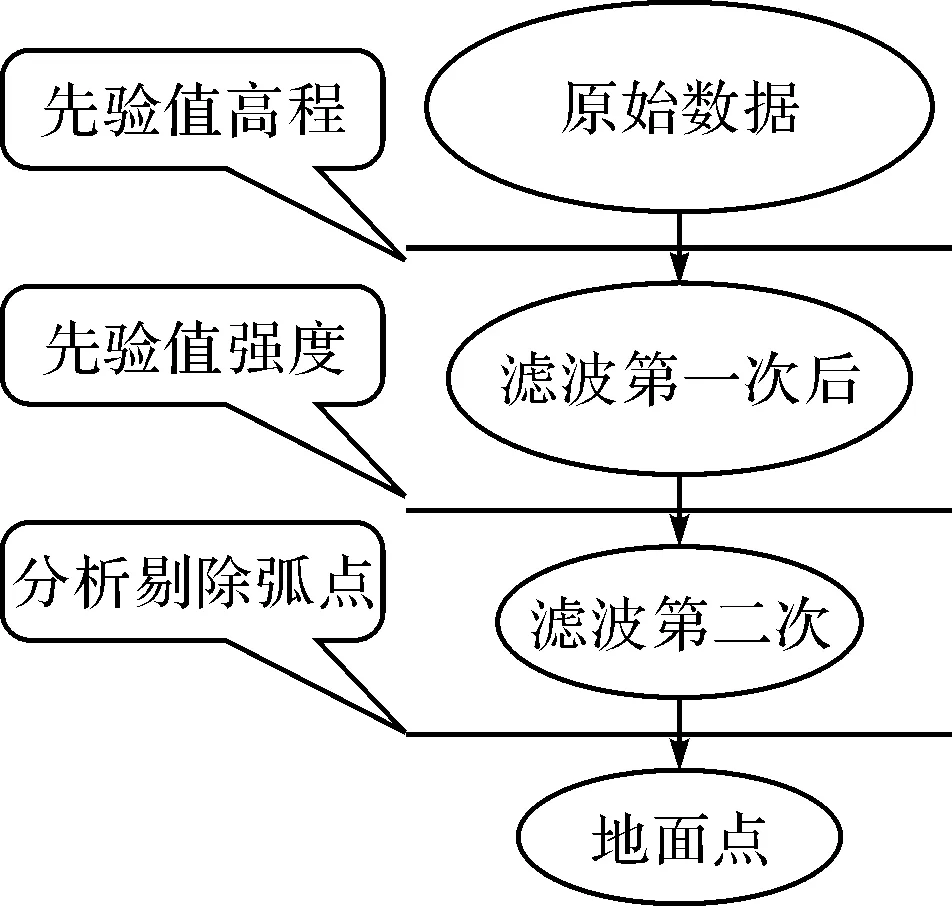
图1 算法主要流程图
1) 通过直观观察出粗略的路面极低点和路面极高点的高程值,分别记为LimitZmin(zmi)和LimitZmax(zma),将此范围之外高程值的点认为是非地面点,剔除;否则认为是地面点。Points为原始数据,PointOne(po)为提取后的点,滤波分类公式为
(3)
2) 计算出PointOne中所有点的反射强度最小值和最大值,分别记为LimitImin(imi)和LimitImax(ima)。将某强度阈值范围之外的的点认为是非地面点,剔除;否则认为是地面点,PointTwo(pt)为提取后的点,其中a,b为强度系数,实验室取值分别为0.5,0.8。滤波分类公式为
(4)
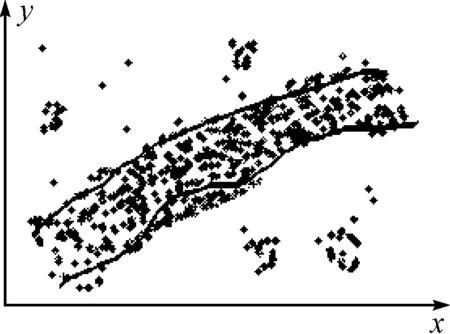
图2 提取后的PointTwo点示例
3)通过前面两次滤波提取出的点已经绝大部分属于地面点,但仍然存在一些噪点影响结果,主要是一些高程和强度都符合阈值的孤立点,如图2所示。
根据道路密集的特性,可以做一些分析。首先计算出pt中相邻最近点的平均距离记为AvgDis,然后遍历pt中的点计算与它最近点的距离。当它小于2*AvgDis,算入一个集合K1,以此类推有K1,K2,…,Kn共n个组合,其中点最多的集合为地面点。
3 实验与分析
将原始机载LiDAR数据显示,如图3所示,图中有道路、路灯、路旁边的山坡以及山上树木等。
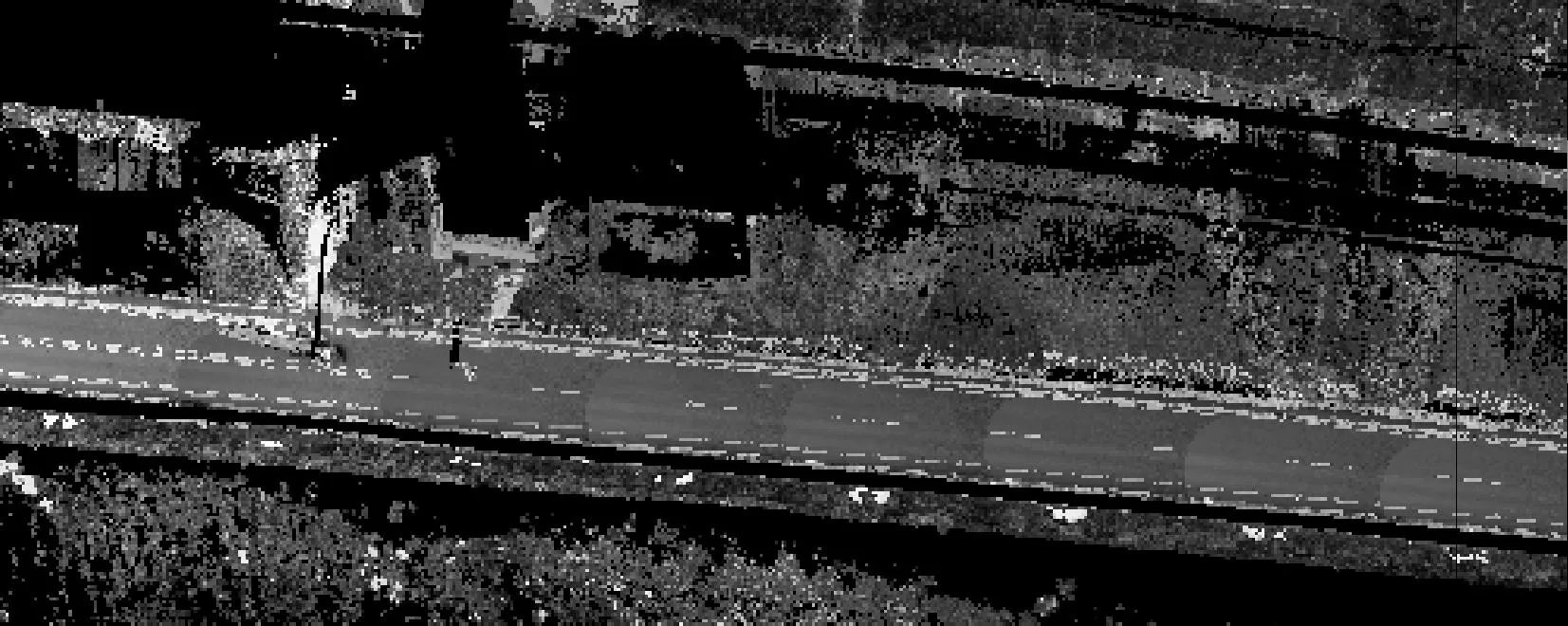
图3 原始LiDAR数据显示图
经过第一次滤波式(4)取高程后如图4所示,显示为PointOne中的数据,从图中4可以看出通过高程筛选之后基本得到了与路面高程阈值之间的点。

图4 提取高程后显示图
经过第二次滤波提取强度后如图5所示,显示为PointTwo中的数据,从图中5可以看到与道路点反射强度阈值不符合的点基本被剔除,出道路两边的石壁、树木等。
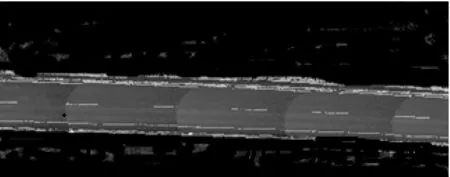
图5 提取强度后显示图

图6 剔除噪点之后道路点显示图
对剩下的道路点进行分析,如图6所示,道路周围有强度和高程符合道路点阈值的点,但这些点形状稀疏,是孤立的点,而道路点密集,即保留集合点中数量最多的集合,即为地面点。
4 结语
本文首先介绍了机载LiDAR数据格式和对数据预处理的过程和方法,在传统的点云滤波算法上结合道路点密集的特征对道路点进行提取。提取道路点的过程中,首先根据LiDAR数据的高程和反射强度分别进行两次过滤,这也是传统滤波方法具有的,进而结合道路点云平整、密集的特点对滤波之后的点进行聚类分析,剔除噪点,保留最大类,删除其它小类。该方法与传统的激光点云滤波算法相比最显著的特点是与被提取物特征相结合,提高了它的通用性,可以适应不同的道路数据。提取出道路点之后,就可以计算道路平面方程和提取道路中线、边线等其他地物。
参 考 文 献
[1] 刘凯斯.机载激光LiDAR点云数据滤波和分类算法研究[D].北京:首都示范大学,2014:3-29.
LIU Kaisi. Airborne laser LiDAR point cloud data filtering and classification algorithm[D]. Beijing: Capital Normal University,2014:3-29.
[2] George Vossleman. Slope based filtering of laser altimetry data[J]. International Archives of Photo- grammetry and Remote Sensing,2000,33(3):935-942.
[3] 殷国伟,张汉德,范学玮.机载三维激光成像系统点云数据滤波与地面点提取算法研究[D].青岛:中国海洋大学,2010:7-16.
YIN Guowei, ZHANG Hande, FAN Xuewei. Airborne 3D laser imaging system point cloud data filtering and ground point extraction algorithm[D]. Qingdao: Ocean University of China,2010:7-16.
[4] Poonam S. Tiwari, H. Pande, et al. Automatic urban road extraction using airborne laser scanning/altimetry and high resolution satellite data[J]. Journal of the Indian Society of Remote Sensing,2009,37(2):223-231.
[5] 张皓.机载LiDAR数据滤波及建筑物提取技术研究[D].郑州:信息工程大学,2009:2-18.
ZHANG Hao. Airborne LiDAR data filtering and building extraction[D]. Zhengzhou: The PLA Information Engineering University,2009:2-18.
[6] 苏伟,孙中平,赵冬玲.多级移动曲面拟合LiDAR滤波算法[J].遥感学报,2009,13(5):833-839.
SU Wei, SUN Zhongping, ZHAO Dongling. LiDAR filtering algorithm for multi-level mobile surface fitting[J]. Journal of Remote Sensing,2009,13(5):833-839.
[7] 赖旭东.机载激光雷达基础原理与应用[M].北京:电子工业出版社,2010:3-180.
LAI Xudong. Basic principle and application of airborne LiDAR[M]. Beijing: Publishing House of Electronics Industry,2010:3-180.
[8] 李卒,李德仁,黄先锋.一种渐进加密三角LiDAR点云滤波的改进算法[J].测绘科学,2010,35(4):91-93.
LI Zu, LI Deren, HUANG Xianfeng. An improved algorithm for LiDAR Point Cloud Filtering in progressive encryption[J]. Science of Surveying and Mapping,2010,35(4):91-93.
[9] 何正斌,田永瑞.机载三维激光扫描点云非地面点剔除算法[J].地球动力学,2009,29(4):98-101.
HE Zhengbin, TIAN Yongrui. Non ground point removal algorithm for airborne 3D laser scanning point cloud[J]. Journal of Geodesy and Geodynamics,2009,29(4):98-101.
[10] 黄燕,刘君城.一种改进的LiDAR数据过滤方法[J].测绘科学,2009,34(3):39-41.
HUANG Yan, LIU Juncheng. An improved LiDAR data filtering method[J]. Science of Surveying and Mapping,2009,34(3):39-41.
[11] 曾静静,卢秀山,王健,等.基于LiDAR回波信息的道路提取[J].测绘科学,2011,36(2):142-143.
ZENG Jingjing, LU Xiushan, WANG Jian, et al. Road Extraction Based on LiDAR echo information[J]. Science of Surveying and Mapping,2011,36(2):142-143.
收稿日期:2015年10月10日,修回日期:2015年11月24日
基金项目:国家自然科学基金项目:路网流量状态识别与均衡研究(编号:61272296)资助。
作者简介:李武奇,男,硕士研究生,研究方向:智能计算、遥感测绘。袁磊,男,博士研究生,教授,硕士生导师,研究方向:数据库技术与信息系统、多媒体技术应用与开发。
中图分类号P23
DOI:10.3969/j.issn.1672-9722.2016.04.025
Filtering and Extracting Road Points Based on Airborne LiDAR Data
LI Wuqi1,2YUAN Lei1
(1. Institute of Mathematics and Computing, Hubei University of Arts and Science, Xiangyang441053)(2. School of Computer Science, China University of Geosciences, Wuhan430074)
AbstractIt is important to extract the road points from the Airborne LiDAR data for feature extraction, a filtering method is presented to extract the road points. First of all, through the elevation of LiDAR data in the feature of road value for the filter, the filtered rough data is saved and then the second filter is carried out according to the LiDAR data in the reflection intensity, beyond the reflection intensity of some threshold points are divided into non road points, excluding the part. The extracted points are analyzed at third time, according to the feature of road value, the points with sparse shape should be filtered but their intensity are congruous. Experiment shows it has good effect on the extraction of road points and it is practical.
Key WordsLiDAR data, filtering, elevation, intensity, excluding
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:34
测控技术(2018年3期)2018-11-25 09:45:32
测绘科学与工程(2017年5期)2017-05-07 06:30:42
海军航空大学学报(2015年1期)2015-11-11 17:18:11
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
空间控制技术与应用(2015年2期)2015-06-05 12:24:55
遥测遥控(2015年2期)2015-04-23 08:15:18
燕山大学学报(2014年2期)2014-03-11 15:28:30
电子设计工程(2014年20期)2014-02-27 12:01:00
测绘科学与工程(2013年4期)2013-03-11 15:07:42
