全地形沙地策略提升车辆通过性能的试验研究
2016-08-08 09:42赵永坡谢善亮逄淑一
工程与试验 2016年2期
赵永坡,谢善亮,李 康,逄淑一
(长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北 保定 071000)
全地形沙地策略提升车辆通过性能的试验研究
赵永坡,谢善亮,李康,逄淑一
(长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心,河北 保定 071000)
摘要:常规车辆的性能设计主要是针对铺装路面,这有可能导致车辆在沙地路面行驶过程中遇到陷车和动力性差等问题。本文通过对比车轮在铺装路面和沙地路面下的受力状况,分析导致此问题发生的原因。针对此问题,开发了一种能够自动识别路面类型的控制算法。根据路面识别情况,制定发动机、变速器及TCS沙地的控制策略来提高车辆的沙地通过性能。最后通过实车标定,验证该控制策略的有效性。
关键词:路面识别;发动机控制策略;变速器控制策略;TCS控制策略
1车辆沙地行驶面临的问题
沙地路面车辆的通过性能不仅与车辆通过性参数(如通过角、接近角、离去角)相关,而且也取决于车辆电控系统的控制策略及标定匹配结果。汽车在沙地上起步、加速、爬坡时,由于沙地路面的特殊性,即使通过降低胎压增加轮胎接地面积的方式[1],车辆提供的驱动力依然很低,驱动车轮易发生过度滑转,而发生“刨沙”现象,使车轮在很短的时间内下陷很深,甚至原地滑转,出现陷车[2]。因此,无特殊控制策略的车辆,即使是四驱车,在沙地中行驶的通过性也很差。
2路面识别策略原理
由于车辆在铺装路面和沙地路面下的受力不同,为保证车辆在铺装路面和沙地路面都能够有很好的通过性能,首先需识别当前路面,使车辆能够自动识别出车辆所处的路况(铺装路面或者是沙地路面)。
路面识别的原理主要是以车轮的动态变化作为参考,设置相应的轮边加速度门限(如图1点a、点b所示)。当加速度超过门限时,计数器增加;否则,计数器按时间递减。路面识别原理如图1所示。

图1 路面识别工作原理图
根据车辆驱动形式,前驱、后驱或前后驱动比设定车轮不同权重,当所有车轮计数器的加权平均值超过门限时,即设置成相应的路面,见式(1)。
C=(CFL+CFR)*WeightFA
+(CRL+CRR)*WeightRA
(1)
式中,C为计数器加权平均值;CFL、CFR、CRL、CRR为4个车轮计数器数值;WeightFA、WeightRA为前后轴权重系数。
根据实车标定时定义车轮加速度门限和计数器加权平均值C来保证路面识别的鲁棒性,避免误触发。
3车辆沙地策略制定
相较于铺装路面,车辆在沙地中起步时,驾驶员很容易踩出更大的油门踏板行程,进而易引起驱动车轮的过度滑转。沙地加速行驶时,受到的阻力也会越来越大[5]。针对沙地路面下所遇到的车辆打滑和动力性差的问题,通过协调控制发动机管理系统(EMS)、变速器控制单元(TCU)和牵引力控制系统(TCS),提高车辆在沙地路面下的整车动力性,避免陷车。
3.1发动机管理系统和变速器控制单元
为避免车辆起步打滑和行驶过程中动力性不足,从扭矩输出角度出发控制车辆扭矩的输出,要求车辆起步时小扭矩输出,避免打滑出现“刨沙”,行驶过程中大扭矩输出,克服较大的行驶阻力。
发动机管理系统EMS沙地控制策略的原则为:起步或低速时发动机扭矩要缓慢输出,避免滑移;高速时扭矩要快速输出,保证输出足够大的扭矩,使得车辆在沙地上能够顺利行驶。通过改变踏板行程所对应的油门开度的方式实现对发动机扭矩需求的变化,如图2所示。
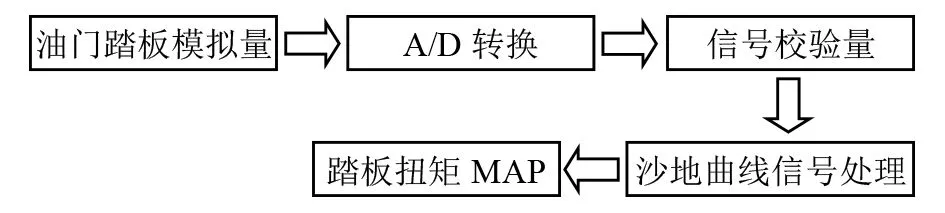
图2 EMS控制策略流程图
沙地油门开度值处理的原则是,先对油门开度值进行缩小,然后进行放大。踏板缩放的具体数值在实车标定过程中确定,在标定过程中修正25%、50%及75%踏板行程时对应的油门开度,通过多项式拟合来修正0~100%之间的油门开度值。油门开度处理的示意图如图3所示,图中,曲线1为正常油门开度,曲线2为沙地模式下油门开度。
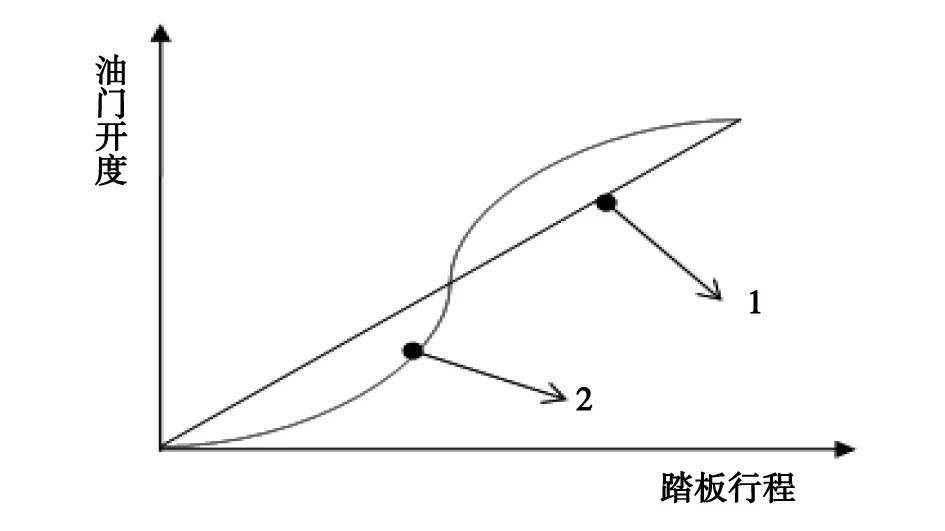
图3 沙地EMS油门开度值处理示意图
由于本文主要是解决沙地路面下车辆起步打滑及加速阶段动力性不足问题,主要考虑变速器升挡情况,不考虑变速器的降挡情况。
再说了,读者可都是主角的亲爹亲妈,当然是要把自家孩子从小看到大啊!那么几万字,甚至十几万字,哪里够呀?
配合发动机扭矩输出,定义变速器换挡曲线要求:与标准换挡曲线相比,小油门时提前升挡,减少扭矩输出,大油门时延迟升挡,维持大扭矩输出。变速器在沙地模式与标准模式下的升挡曲线对比如图4所示。以50%油门开度为基准,小于50%时提前升挡;超过50%时,延迟升挡。

图4 沙地TCU升挡曲线示意图
3.2牵引力控制系统(TCS)
车辆在不同路面情况下最佳滑移率控制范围(阴影区域)不同,而且由于沙地路面的特殊性,滑移率控制不同于普通的铺装路面,如图5所示。

图5 不同路面附着系数与滑移率的关系
牵引力控制系统(TCS)是以滑移率为控制目标,应用PID控制算法,根据实际驱动轴转速与目标转速差值计算车轮端目标转矩,通过发动机扭矩请求与制动器制动实现车轮目标转矩。
考虑到沙地路面遇到的实际问题,要求牵引力控制系统(TCS):低速阶段小滑移率时起作用,保证车辆起步车轮刚有打滑趋势时,系统立即起作用,控制发动机扭矩的输出或在打滑车轮上施加制动力,降低车轮的滑移率,避免车轮过度滑转或出现“刨沙”现象,便于起步;高速阶段大滑移率时起作用,保证在行驶过程中能够给车辆提供足够的动力,便于车辆在沙地中的快速行驶,如图6所示。
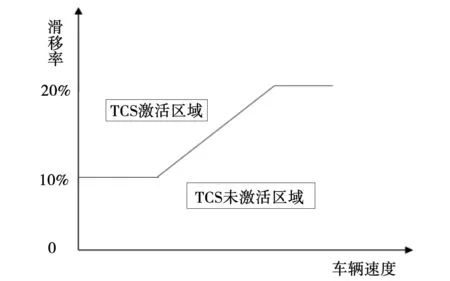
图6 沙地TCS控制策略示意图
4试验验证
车辆的电控系统都需要实车性能标定。针对上述控制策略,驾驶哈弗某四驱车在沙地路面进行了性能标定和策略验证。
连续进行了多次路面识别试验,采集车轮转速进行处理,获得轮边加速度(轮胎与地面接触点的加速度),铺装路面和沙地4个车轮的轮边加速度的波动范围,如图7、图8所示。

图7 铺装路面下4个车轮的轮边加速度

图8 沙地路面下4个车轮的轮边加速度
图7为根据试验数据分析得到的铺装路面的轮边加速度变化情况,其波动范围为-30m/s2~30m/s2,波动范围较小。图8为沙地的轮边加速度变化情况,波动范围为-85m/s2~100m/s2。为防止路面的误触发,保证路面识别的准确性,设置铺装路面轮边加速度的波动范围为-40m/s2~40m/s2。当加减速度超过此门限值时,计数器开始计数,计算计数器的加权平均值。当加权平均值C大于50时,即识别为沙地路面,否则为车辆默认的铺装路面。
在相应沙地路面进行路面识别策略验证工作。图9中,曲线1为TCS工作信号,曲线2为沙地状态信号,曲线3为油门踏板信号,曲线4为发动机转速信号。从曲线2可以看出,车辆能够按照上述策略自动识别出沙地路面(1-沙地,0-非沙地)。
为了验证路面识别功能的鲁棒性,在铺装路面上行驶,如图10所示,没有沙地误识别的情况发生(沙地信号置0)。由此可知,上述路面识别算法是可信的。
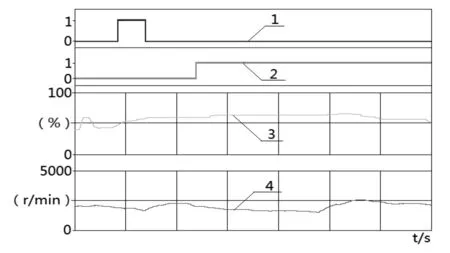
图9 沙地路面识别
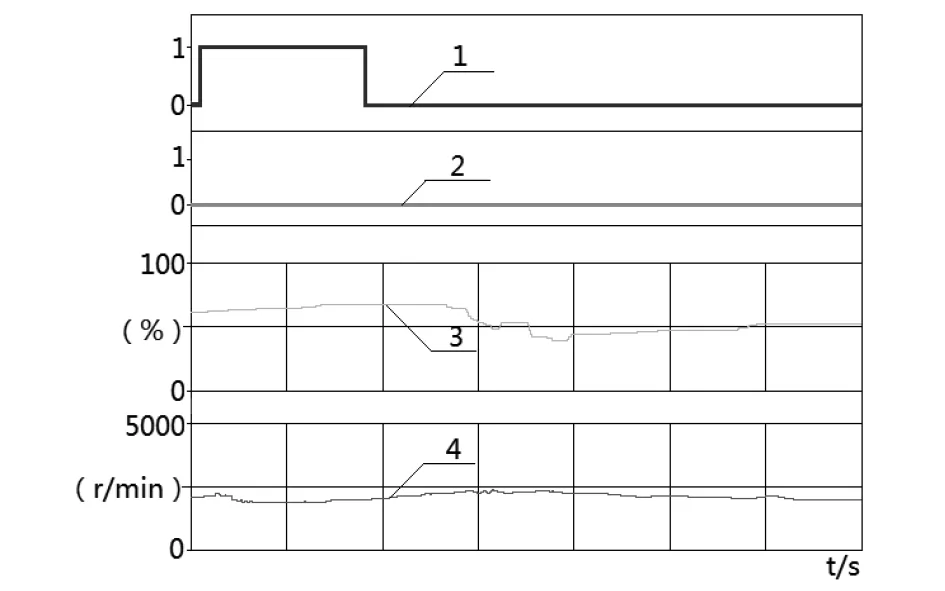
图10 铺装路面识别
4.2沙地性能验证
根据制定的发动机、TCU及TCS控制策略在沙地路面进行标定匹配,将标定匹配后的车辆与无沙地控制策略的车辆进行性能对比试验,主要考查TCS介入时机、车轮转速波动情况、车辆从0加速到10m/s时的时间及加速度。
图11中,曲线1为TCS工作信号(1-TCS激活,0-TCS未激活),曲线2为油门踏板信号,曲线3为发动机转速信号,曲线4为4个车轮转速信号。在软质沙地直线行驶的工况中,无沙地控制策略的车辆,由于TCS起作用时的滑移率门限较低(相对于沙地控制策略中高速阶段TCS激活时的滑移率较低),在t1=9.7s时TCS激活,介入太早,导致车轮转速在182~253r/min变化,波动较大(波动量Δn=71r/min);车辆从0加速到10m/s的时间t2=14.1s,平均加速度为0.71m/s2,车辆动力性不能够充分发挥,加速性能不好。

图11 直线加速无沙地控制策略的车辆状态
图12为有沙地控制策略的车辆,TCS在起步阶段小滑移率时即起作用,发动机转速有所下降,从而避免了驱动轮的“刨沙”下陷,利于起步。
高速阶段在有较大滑移时,TCS才开始介入,介入时机合适,车轮转速在241~256r/min变化,波动较小(波动量Δn=15r/min)。车辆从0加速到10m/s的时间t4=10.9s,平均加速度为0.92m/s2,能够充分发挥车辆动力性,加速性能好,使得车辆能够顺利行驶。
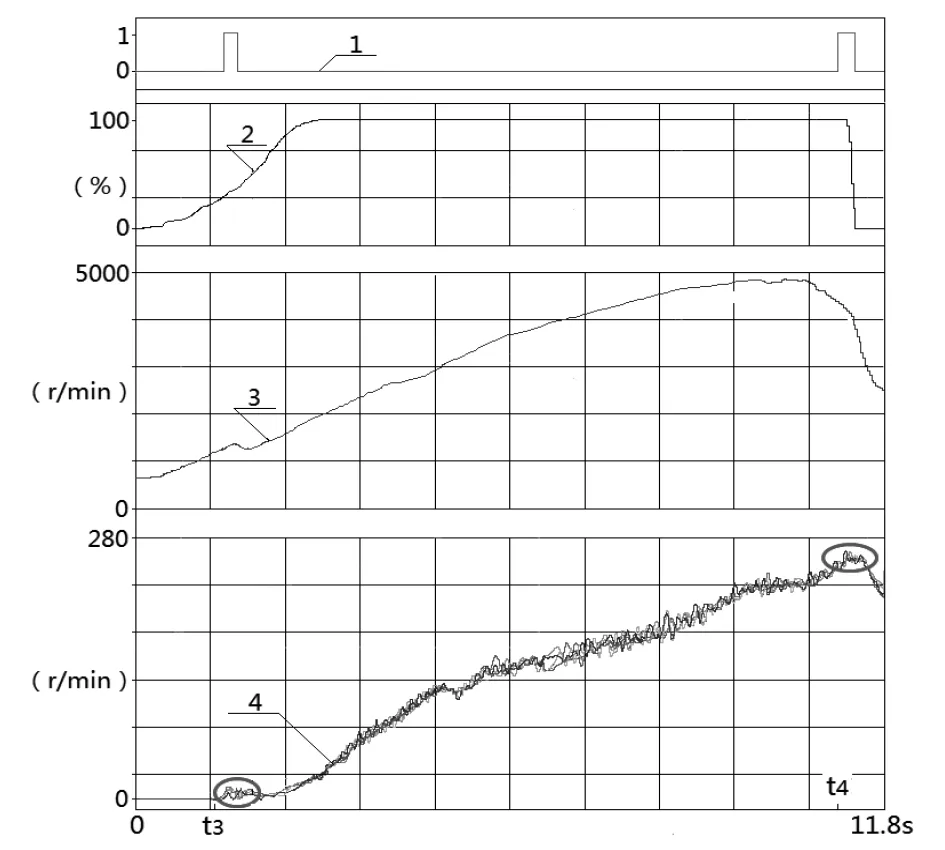
图12 直线加速有沙地控制策略的车辆状态
5 结论
(1)试验数据表明,加速度门限a设置在-40m/s2~40 m/s2,加权平均值C门限为50时,能够识别出沙地路面。
(2)通过实车标定,有沙地控制策略的车辆能够实现起步阶段小滑移率时TCS激活,高速阶段大滑移率时TCS激活,车轮转速在241~256r/min变化,波动量Δn=15r/min,波动小;从0加速到10m/s时的平均加速度为0.92 m/s2,加速性能好。
(3)沙地控制策略很好地解决了车辆在沙地行驶中遇到的车轮打滑及动力性不足的问题,提高了车辆在沙地的通过性。
参考文献
[1]李杰,庄继德,魏东,等.沙漠仿生轮胎与普通轮胎牵引性能的对比试验[J].吉林大学学报(工学版),2006,36(4):510-513.
[2]张华,李幼德.轻型越野汽车沙地牵引力控制算法研究[D].吉林大学,2007.
[3]李幼德,王志浩,李礽.EQ2110G汽车新疆塔里木沙漠地区的通过性研究[J].汽车工程,1994,16(2):74-79.
[4]余志生.汽车理论[M].机械工业出版社,2009.
[5]刘灵敏.沙滩车AMT离合器起步控制方法研究[D].吉林大学,2009.
[收稿日期]2016-06-22
[作者简介]赵永坡(1980-),男,工程师,主要从事动力学性能开发、试验测试、驾驶辅助系统开发、底盘调校等工作。
中图分类号:U461.5+1
文献标识码:B
doi:10.3969/j.issn.1674-3407.2016.02.008
Experimental Research on All-terrain Sand Strategy Used to Improve Vehicle Driving Ability
Zhao Yongpo, Xie Shanliang, Li Kang, Pang Shuyi
(Great Wall Motor Co., Ltd. Hebei Automobile Technology Research Center, Baoding 071000, Hebei, China)
Abstract:Performance design of conventional vehicle is aimed at regular road, which will possibly cause the vehicle to sink into the sand or have bad power performance when driving in the sand. The causes of above problems are analyzed in the paper by comparing force analysis of a wheel in hard pavement and sand pavement. Firstly, a method of automatically detecting pavement type is developed to solve the problems, and then the sand control strategies of EMS, TCU and TCS are made according to the detection result to improve the driving ability of vehicle. Finally, the validity of the strategies is verified through real vehicle calibration.
Keywords:road identification; EMS control strategy; TCU control strategy; TCS control strategy