
河工模型试验目标水位突降时尾门水位的控制
2016-08-06 03:02杜剑锋马志敏范北林
长江科学院院报 2016年4期
杜剑锋,马志敏,范北林
(1.武汉大学 电子信息学院, 武汉 430072; 2. 长江科学院 河流研究所, 武汉 430010)
河工模型试验目标水位突降时尾门水位的控制
杜剑锋1,马志敏1,范北林2
(1.武汉大学 电子信息学院, 武汉430072; 2. 长江科学院 河流研究所, 武汉430010)
摘要:针对河工模型试验过程中目标水位下降幅度过大时可能造成尾门开启过度、流速急剧增加,从而导致动床地形冲毁的现象,提出了一种尾门平稳过渡控制的方法。即在试验开始阶段,停止尾门调节器PID(proportion-integration-differentiation)控制模式,采用逐步开启尾门,直至模型水位接近目标水位后再自动转入PID调节模式。在试验过程中,目标水位降幅超过设定的正常幅度后,调节器自动将目标水位变化分解为按阶梯逐步下降的过程,阶梯的幅度和持续时间可以根据实际模型事先整定。将新方法应用到长江防洪模型供水系统,并嵌入到尾门PID调节系统中。试验表明:采用这些方法后,能有效抑制目标水位降幅过大时造成尾门的超调,保证了尾门水位的平稳过渡,并且有效提高了尾门控制的平稳性和试验系统的可靠性;新方法使得水位调节平衡的时间有所增加,应根据模型的特性,选择适当的控制参数。
关键词:尾门水位调节;PID算法;流速;地形;河工模型试验
在河工模型试验中,如果遇到目标水位突然大幅下降的情况,试验人员一般会启用手动尾门,通过人工干预的方法,以保证模型水位的平稳过渡。这样做的主要目的,是为了防止自动调节过程中,由于尾门突然打开而导致流速急剧增加,冲毁动床地形这种情况的出现。但这既增加了试验人员的负担,也破坏了尾门水位自动控制系统的完整性。针对这个问题,本文给出了一套模型水位突变时尾门安全控制的方案,在保证水位调节精确快速的同时,也有效防止了流速突变的可能。
1目标水位快速下降时尾门水位调节中存在的问题
在河工模型试验过程中,尾水位的调节一般采用数字PID算法[1]。在实际控制过程中,会对PID算法做一些改进。如增加了非线性环节的PID调节算法有增强系统稳定性,有效抑制震荡的优点[2]。模糊PID调节算法有响应速度快、水位控制稳定性好的优点[3]。但是,PID算法只以模型水位为控制对象,追求水位调节的快速和精确。在某些时候,以单一目标为控制对象的PID算法,并不能很好地适应模型试验的要求[4]。这主要是指,当模型试验中目标水位降幅较大时,为了保证水位快速调节,PID调节系统会控制尾门迅速打开,造成尾门过度开启,导致模型中水流速度急剧增加进而破坏动床地形。
在实际的模型试验中,目标水位突然大幅下降或显著低于当前实际水位的情况主要有2种。第1种出现在模型试验的启动阶段,模型可能处于保水状态,模型中的水位维持较高水平。启动试验后,目标水位可能显著低于当前模型水位。第2种出现在洪峰后期,概化水位过程线降幅较大[5],目标水位迅速下降。在这2种情况下,如果还采用相同的PID调节模式,极可能导致尾门的过度开启,从而造成流速急剧增加和动床地形的损毁。针对这2种情形,本文给出了不同的控制方案。
2尾门的安全控制方案
对于第1种情形,即在模型试验的启动阶段,尾门调节尚未开始,当检测到实际水位较高而目标水位很低时,采用逐级开启模式逐级开启尾门。
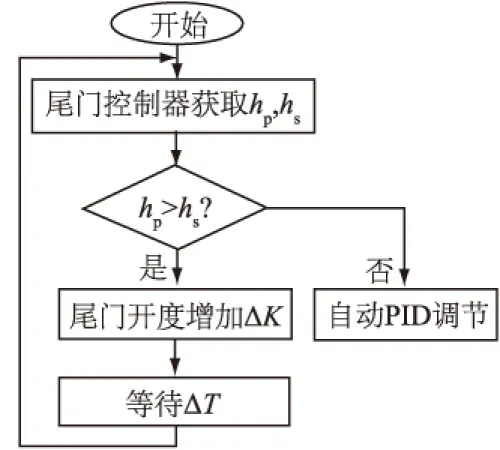
图1 试验启动阶段尾门 逐级开启模式的控制流程
试验开始阶段,尾门逐级开启模式的流程图如图1所示。
图1中,hs为当前时刻的目标水位值;hp为当前时刻的实际水位值;ΔT为时间间隔;ΔK为开度步长(%),根据实际河工模型大小和槽蓄能力事先整定。
控制过程如下:①在尾门启动阶段,尾门控制器获取河工模型的当前实际水位;②比较当前实际水位和第1阶段的目标水位的大小,若当前实际水位高于目标水位,则每隔ΔT时间将尾门开度增加ΔK(%);③在整个尾门启动阶段,尾门控制器实时检测河工模型的当前实际水位,一旦检测到当前实际水位达到或低于目标水位,则停止逐级开启模式,系统进入自动PID调节模式对尾门进行调节控制。
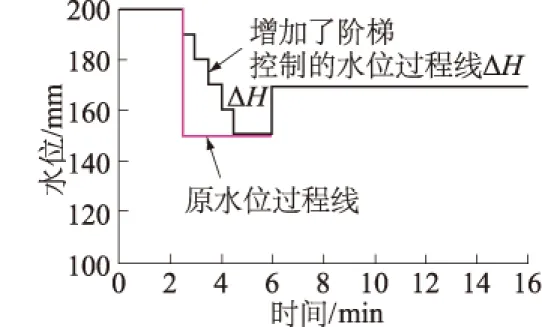
图2 增加了过渡区的 目标水位过程线
对于第2种情形,即试验过程中目标水位降幅较大时,为了不破坏PID调节的连续性,选择采用目标水位阶梯式逐级调节模式。如图2所示,即在概化后的过程线中增加过渡区,保证目标水位值不发生突变。
目标水位阶梯式逐级调节模式的流程图如图3所示。
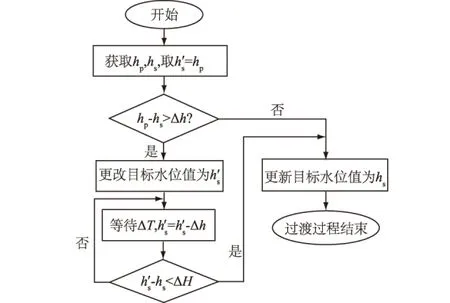
图3 目标水位阶梯式逐级调节模式过程流程
图3中,Δh为是否开启阶梯调节模式的阈值;ΔH为目标水位递减的步长,它们的大小根据实际河工模型大小和槽蓄能力整定。

3试验与控制效果
为了验证上述控制方案的可行性,笔者在长江防洪模型上进行了试验,并在试验中增加了旋桨流速仪用于实时监测模型水流速度。
3.1逐级开启模式
对于逐级开启模式,按表1所示参数进行了试验。组号1为参考组,是指直接采用PID自动调节,不进行尾门逐步开启的情形。组号2和组号3为试验组,其尾门开度的步长分别为5%和2%,时间间隔ΔT为30 s,模型流量为150 L/s。在试验中记录了尾门开度、水流速度和模型水位随时间的变化情况。同时使用激光地形仪测量了采用逐级开启模式前后,模型尾门附近的地形变化情况。
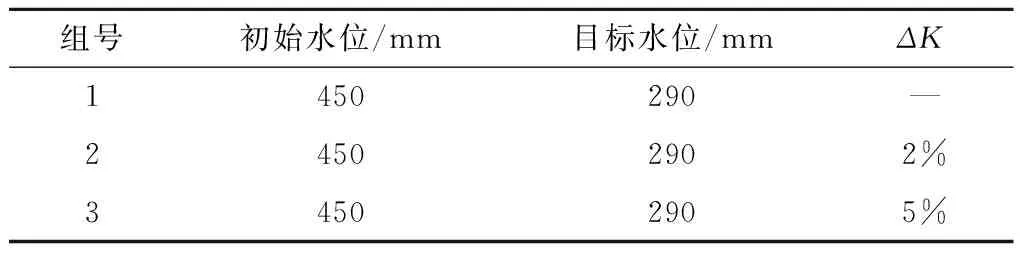
表1 逐级开启模式时试验参数Table 1 Test parameters when tail gate opens by step

图4 逐级开启模式时尾门水位及流速随时间变化关系
图4给出了各个试验条件下,水位与时间变化关系和流速与时间变化关系,从图中可以看出:①当采用了逐级开启模式后,流速峰值由34 cm/s下降为26 cm/s,有效地抑制了模型中水流速度的急剧变化;②采用逐级开启模式时,水位的控制效果和开度步长有密切的关系,选用不合理的开度步长(ΔK=5%)会使得控制效果不明显。
图5给出了采用逐级开启模式前后,尾门附近的动床地形变化情况。其中试验组地形是在ΔK=2%时测量的。从图5中可以看出,当不采用逐级开启模式时,河床被冲刷,高度最大下降13.4%,产生了明显的变化,而采用逐级开启模式后,河床地形变化较小,有效防止了河床被冲毁情况的出现。
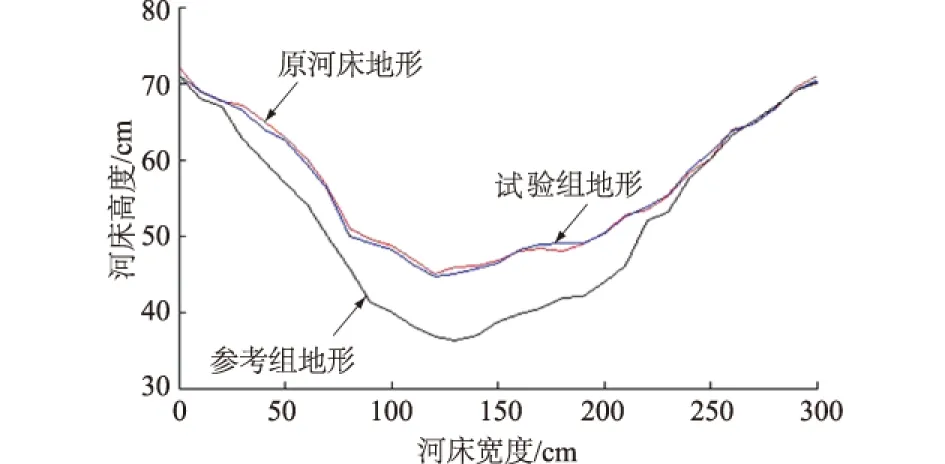
图5 逐级开启模式时尾门附近动床地形对比
3.2目标水位阶梯式逐级调节模式
对于阶梯式逐级调节模式,按表2所示参数进行了试验。其中组号1为对参考组,组号2,3和4为试验组。试验流量为100 L/s,时间间隔ΔT为30 s。在试验中记录了尾门开度、水流速度和模型水位随时间的变化关系。同时使用激光地形仪测量了采用阶梯控制模式前后模型尾门附近的地形变化情况。
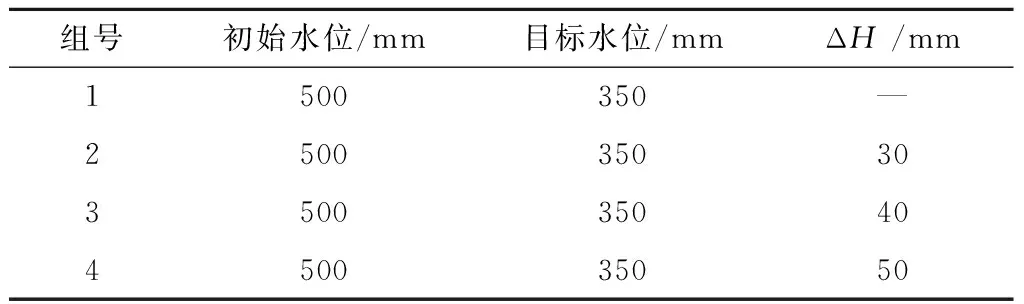
表2 阶梯式逐级调节模式时试验参数Table 2 The experimental parameters in the stepped control model
图6给出了试验中尾门开度及流速随时间的变化情况。
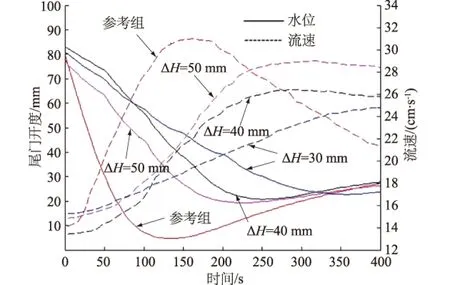
图6 阶梯式逐级调节模式下尾门开度及 流速随时间变化关系
从图6中可知:当采用阶梯控制策略后,能有效地防止尾门的过度开启,水流流速变化平稳,流速峰值由32.0 cm/s降为24.9 cm/s,降幅达21.8%。从图7可以知道:①采用阶梯控制模式后,水位调节平衡时间变长,由380 s增加为410 s,增幅为7.8%;②当不采用阶梯控制模式时,水位调节将出现超调(超调量达5.7%),而采用阶梯控制模式能克服超调现象。
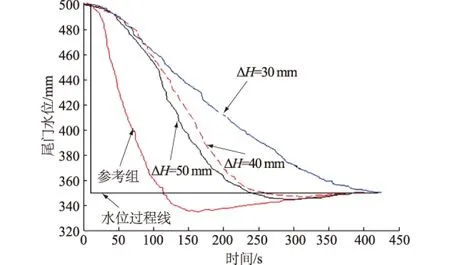
图7 阶梯式逐级调节模式下尾门水位-时间变化
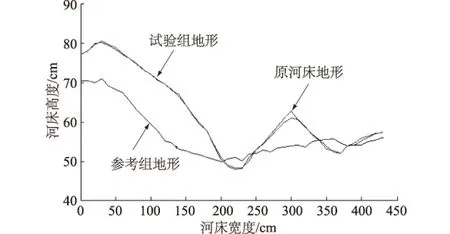
图8 阶梯式逐级调节模式下尾门附近动床地形对比
图8给出了采用逐级调节模式前后尾门附近的动床地形变化情况。其中试验组地形是在ΔH=30 mm的情况下测量的。从图8中可以看出采用阶梯控制模式后,可以有效防止地形被冲毁。
通过上面的试验,可知采用阶梯模式后,模型流速变化平缓,能够防止冲坏动床模型这种情况的出现。当然,所付出的代价是水位调节时间有所增加。针对不同的试验模型,在试验之前应该选用合理的开度步长和水位变化步长。
4结语
试验证明,采用逐级开启模式和目标水位阶梯式逐级调节模式后,能有效地防止尾门的过度开启,确保流速变化平稳,不出现流速过快而冲毁动床的现象。
本套控制方案在长江防洪模型供水系统中得到了合理运用,有效提高了尾门控制的平稳性和试验系统的可靠性。显然,在选用此控制方案后,水位调节平衡的时间会有所增加,因此,需要根据具体模型,选择合理的控制参数,在保证尽量不破坏动床地形的前提下实现模型水位过程的快速跟踪调节和准确模拟。
参考文献:
[1]吕列民. 水力模型尾水控制测控系统数学模型[J]. 南昌大学学报(工科版),2005,27(2):48-51.
[2]虞邦义,马浩,俞国青. 差动式尾水调节系统数学模型[J]. 泥沙研究,2005,(1):21-25.
[3]任伟,罗建华,何世钧,等. 基于变结构PID算法的河工模型尾门水位调节系统[J]. 河南科学,2007,25(6):963-965.
[4]刘建东,张鸾英,谷俊杰. 数字PID控制系统的鲁棒性分析与设计[J] . 华北电力大学学报,2003,30(6):30-33.
[5]渠庚,唐峰,孙贵州,等. 时间变态对模型水流运动相似影响试验研究[J]. 西安理工大学学报,2009,25(4):487-492.
(编辑:占学军)
收稿日期:2015-03-27;修回日期:2015-05-06
作者简介:杜剑锋(1991-),男,湖北武汉人,硕士研究生,主要从事检测装置及自动化研究,(电话)15527178343(电子信箱)whu_du@sina.com。 通讯作者:马志敏(1956-),男,湖北武汉人,教授,主要从事河工模型量测仪器设计、超声检测与成像等研究,(电话)13986010725(电子信箱)whumazm@163.com。
doi:10.11988/ckyyb.20150226
中图分类号:TV83
文献标志码:A
文章编号:1001-5485(2016)04-0131-04
A Method of Controlling Water Level at Tail Gate When Target WaterLevel Drops Sharply in River Model Experiment
DU Jian-feng1, MA Zhi-min1, FAN Bei-lin2
(1. School of Electronic Information, Wuhan University, Wuhan430072, China;2.River Department, Yangtze River Scientific Research Institute, Wuhan430010, China)
Abstract:When target water level falls sharply in river model experiment, tail gate may open excessively and flow velocity increases in a short time, destroying the riverbed terrain. In view of this, a steady control method for tail gate is put forward: stopping the tail gate PID (proportion-integration-differentiation) control mode in the early stage of experiment until the modeling water level approximates the target water level. In the scenario, if the target water level drops more than forecast, the target would decline in a regular interval until the actual water level is close to the final target .The magnitude and duration of the target decline are different according to different external experiment. This scheme is applied to the water supply system of Yangtze River Flood Control Model, and is embedded into the PID control system of tail gate. Experiments verified that the excessive adjustment of tail gate when target water level drops sharply is effectively controlled, hence ensuring the steady water level and improving the reliability of experiment system. As the duration of water level control is increased, we should select proper control parameters according to the model features.
Key words:water level control at tail gate; PID; flow velocity; terrain; river model experiment
2016,33(04):131-134
猜你喜欢
汽车维护与修理(2022年3期)2022-08-02
汽车实用技术(2022年10期)2022-06-09
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
大众科学(2020年7期)2020-10-26
汽车维修与保养(2020年1期)2020-04-19
开封文化艺术职业学院学报(2020年11期)2020-01-09
小天使·六年级语数英综合(2018年1期)2018-10-08
求学·理科版(2018年5期)2018-05-26
求是学刊(2015年5期)2015-09-11
