
潜艇攻击多目标条件下的占位机动研究
2016-08-03 10:18夏佩伦武志东
火力与指挥控制 2016年4期
夏佩伦,武志东,李 博
(海军潜艇学院,山东 青岛 266042)
潜艇攻击多目标条件下的占位机动研究
夏佩伦,武志东,李博
(海军潜艇学院,山东青岛266042)
摘要:对潜艇攻击多个目标条件下射击阵位选择及占领射击阵位机动的有关问题进行了探讨。指出了多目标战场态势及攻击模式对占位机动的影响。将多目标战场态势分为编队多目标和一般多目标两种情况,将多目标攻击分为同时攻击和连续攻击两种模式,分别研究了射击阵位选择的基本原则以及潜艇占领射击阵位的机动策略。
关键词:潜艇攻击,多目标,编队目标,占位机动
0 引言
现代潜艇一般都具有多目标攻击能力,即在一次攻击过程中,对多个目标进行识别、跟踪和射击。多目标攻击的原理无疑是要以单目标攻击原理为基础的,但前者要比后者复杂许多。多目标攻击存在一系列单目标攻击原理所无法包容的内容,而这些内容在传统的潜艇攻击理论中没有系统阐述。为此,有必要对潜艇多目标攻击涉及的有关问题进行全面深入的研究,以便为实际的攻击提供指导。
武器射击阵位选定及占领射击阵位机动(简称占位机动)是潜艇攻击过程中的重要工作。射击阵位的优劣直接关系到武器的命中效果,而能否占领到理想的射击阵位,取决于潜艇的操控机动性能,以及潜艇指挥员采取的机动策略是否合理准确。
传统的潜艇攻击理论主要都是针对单目标攻击的[1],对多目标攻击问题涉及甚少。针对多目标攻击的射击阵位优选及潜艇占位机动的分析和研究更是少见。文献[1]对单目标攻击条件下的潜艇攻击机动(包括接敌机动和占位机动)进行了较为系统的论述。文献[2]则对潜艇使用鱼雷武器攻击单目标条件下的占位机动问题进行了较为深入的专门研究。有关多目标跟踪的一般文献则有很多,如文献[3-6]。本文拟将潜艇多目标攻击态势分为编队多目标和一般多目标态势,将攻击方式分为同时攻击和连续攻击两种类型,分别探讨占位机动的有关问题。
1 多目标攻击占位的一般概述
潜艇要对目标实施攻击,一般需要首先选定适当的武器射击阵位,并要通过控制潜艇的运动来占领该射击阵位,潜艇到达阵位点后再发射武器。由于潜艇的机动性较差,射击阵位选择是否合理、潜艇占位机动策略是否得当显得十分关键,多目标攻击条件下更是如此。要想取得一次攻击毁伤多艘敌舰船的战果,射击阵位选择和占位机动都必然要兼顾到欲攻击的各个目标,其难度无疑要比单目标情况大得多。
显然,多目标攻击阵位选择有以下基本原则:选定的射击阵位对于各被攻目标而言都要具备武器的可攻性。即在选定的阵位点使用武器攻击各目标的话,武器射程都在极限射程之内。
射击阵位的选择及占位机动方案的制定与执行都与武器的射击方式有关[2]。潜射鱼雷武器有直进射击和转角射击两种射击方式。直进射击要求潜艇战斗航向与预计的武器直进航向一致,因此,对潜艇的占位机动有严格的限制,潜艇的射击阵位也无法精确指定。转角射击对潜艇战斗航向没有严格限制,因而占位相对便利,潜艇射击阵位也能精确到点。为方便实施,多目标攻击一般宜采用转角射击方式来控制武器发射。为此,以下论述仅针对转角射击方式。
潜艇攻击多目标的占位问题同多目标态势的类型有较大关系。一般来说,多目标态势可分两种情况,分别称为编队多目标态势和一般多目标态势[3]。编队多目标态势是指多个目标从属于同一个编队的态势,编队中的多个目标构成一个整体,它们一般是为完成某一统一的任务而集结到一起。编队多目标受到统一的指挥,行动高度协调一致。编队多目标的整体性使得编队中各目标间具有某些共性,如编队直航运动时可认为各目标有相同的航向航速[4],对此,潜艇在占位时可加利用。
一般多目标态势则是指在潜艇感知或关注的战场中出现的多个目标彼此没有明显的关系,各目标的行动没有统一指挥的迹象,各目标的速度、航向各不相同,相对位置也是变的。
潜艇攻击多目标的占位问题还与拟采取的攻击类型有关。潜艇在一次攻击行动中对多个目标发起攻击,从武器射击的时序看,可分为两种情况。一种是对多个目标同时进行射击;另一种是对多个目标实施逐个射击[7]。为了便于后面的叙述,称前一种情况为同时攻击,称后一种情况为连续攻击。不同的攻击类型对攻击目标的选择是有一定影响。同时攻击对目标态势的要求要高于连续攻击,因此,可能会出现同一态势下两个目标不具备同时可攻性,但具备连续可攻性的情况。
2 编队多目标攻击的占位机动
编队目标一般保持一个固定的队形,这使得编队多目标态势的占位分析比一般多目标态势要相对简明一些。因为编队可以看成是一个大的、复合的单一目标,因此,潜艇的占位机动与单目标的情况有相似之处。
2.1同时攻击的情形
以图1所示的两个目标的态势来加以说明。图中W为我潜艇位置,M1和M2分别为两个目标的位置,两个目标的航向皆为Hm、速度皆为Vm;两个大圆分别为两个目标的极限射距圆,其半径用Slj表示(假定为同一种武器,因而半径相等。极限射距圆的概念可参考文献[8-10]),圆心分别为期望命中点C1和C2;小圆是潜艇最高可用速度圆,其半径是潜艇占位时可用的最高速度Vwg,-Vm是目标的反向速度。假定两个目标都作匀速直线运动。

图1 同时攻击编队多目标的阵位可行域
由于两个目标始终保持速度航向一致,因此,它们之间的相对位置关系始终保持不变。由一般的潜艇攻击占位知识可知[1],只要我潜艇能进入到两个目标极限射距圆的公共区域(图1中两个大圆的相交部分),则从武器可攻性的角度看就能同时使用武器对两个目标进行攻击。为此,可将该公共区域称为多目标同时攻击的武器射击可行域。因此,射击阵位点选择必须在该可行域内。
然而,由于潜艇机动性能和态势的限制,很多情况下,潜艇并不一定能占领到武器射击可行域内的所有点。因此,有必要考察潜艇的占位能力,该能力一般用潜艇的机动可行域来表示。由单目标潜艇机动可行域的知识可知[1],其对图1所示编队目标的机动可行域为以我潜艇位置W为顶点、以潜艇最高可用速度圆两切线为边的锥形范围,即图1中∠PWQ所夹范围。
显然,潜艇欲同时攻击图1所示两个目标的射击阵位必须选择在武器射击可行且潜艇机动可行的区域,即应该选择在武器射击可行域和潜艇机动可行域的公共部分(即图中阴影部分),该区域称为潜艇占位射击可行阵位域,简称潜艇阵位可行域。
通过图1这样一个简单的态势就可以看出编队多目标占位问题的复杂性。首先,以潜艇的机动性能,很多情况下是占领不到射击阵位的。其次,即使可以占领到一定的射击阵位,阵位可能也不一定理想。如图1中的情况,要占领适当的射击阵位,潜艇必须要穿越目标M2的航向线,这在潜艇战术上是比较忌讳的。此外,即使能够占领到的阵位,对目标M1而言,都显得射击目标舷角过大,从攻击效果等因素考虑,也不是理想的射击阵位。
2.2连续攻击的情形
连续多目标攻击由于无需在同一阵位点对两个目标实施射击,因此,不要求两个目标有相同的射击阵位点。即可为两个目标单独设定阵位点,这无疑会大大放宽阵位的选择范围,同时给占位机动带来便利。
需要注意的是,尽管阵位选择范围与同时攻击相比扩大了,但仍要求所选阵位都在我潜艇的机动可行域内。
如图2示出了两个编队目标M1和M2,显然,它们不具备同时可攻性,但基本具备连续可攻性,且必须将M1选为首攻目标。两个目标可以分别选定射击阵位,但并非随意选择。尤其是首攻目标射击阵位的选择,不仅要考虑首攻目标的射击,还要考虑给次攻目标的攻击创造便利。
次攻目标射击阵位的选定要注意考虑以下两点。一是要注意次攻目标射击阵位必须要选在潜艇针对次攻目标的占位可行域内。这个问题看似无需强调,但实际上很容易忽略。如图2所示的次攻目标M2,当我潜艇处在W时,潜艇机动可行域(∠PWQ所夹范围)可完全覆盖目标M2整个极限射距圆。这意味着若直接从W点出发的话,潜艇可以占领目标M2整个极限射距圆中的任何一点。然而,由于我潜艇需先针对目标M1占位,假设阵位点为图2中的W′,完成这一占位过程后,潜艇机动可行域变为∠P′W′Q′所夹范围。显然,此时目标M2的我潜艇占位可行域比直接从W点出发时显著变小了。

图2 连续攻击编队多目标的阵位选择
二是要考虑首攻目标射击过程要占用的时间和潜艇期间要实施的机动。潜艇在攻击首攻目标的过程中,占位过程有可能并非像预想的那样顺利,需要进行调整。到达射击阵位发射武器后,潜艇也可能要进行一定的规避或便于观察攻击效果的机动,而不是立即进行针对次攻目标的占位机动。即便开始占位机动,潜艇一般还需要由其他航向转向至占位航向。这些都会占用时间,且导致潜艇位置离开针对首攻目标的射击阵位。因此,次攻目标的占位选择要留有余地,尽量避免那些勉强才能占到的阵位。
3 一般多目标攻击的占位机动
一般的多目标攻击占位比编队多目标攻击占位要更为复杂。这种态势下各目标的速度、航向各不相同,相互间的相对位置不断变化,因此,无法确定一个相对固定的阵位点了。潜艇相对各目标的机动可行域也各不相同,而不是像图1中的编队多目标情形那样有相同的潜艇机动可行域。
一般的多目标攻击占位也分为同时攻击和连续攻击两种情形来讨论。
3.1同时攻击的情形
对于一般的多目标攻击态势,要想实施多目标同时攻击,首先要确定欲攻击的目标是否具有同时可攻性。要同时具备可攻性,就是要求在某个时刻被攻各目标以及我潜艇能接近到如下的态势:各被攻目标出现公共的武器射击可行域,且我潜艇处在该可行域中,如下页图3所示。显然,在各个目标速度、航向各不相同的情况下,要作出这一判断并不容易。为此,又将一般多目标占位问题分两种情形来考虑。

图3 立即可攻的一般多目标态势
情形一是当前潜艇处在各被攻目标的武器射击可行域内,即潜艇当前位置就可以作为射击阵位使用。这种情形下,只要该位置满足基本的射击条件和战术要求,则可就以它为射击阵位,对各被攻目标同时实施武器射击,因此,这种态势称为多目标立即可攻态势。图3中示出的就是这种情形,其中,Hl1和Hl2分别表示攻击目标M1和M2武器的航向。一般多目标攻击态势变化复杂,潜艇的机动稍有不慎,就可能丧失已有的射击机会。像图3中的这种态势,因两个目标逐步相互远离,因此,武器射击可行域将逐步变小,直至消失。这意味着,如果潜艇不迅速抓住当前可攻的机会的话,有可能因态势变得不可攻而丧失多目标攻击机会。
情形二是当前潜艇位置无法作射击阵位使用,必须要通过机动才有可能占领到适当的射击阵位。如不具备多目标的立即可攻性,但具备机动可攻性的态势就属这种情形。图4示出了一种这样的情形,图中仅给出了我潜艇相对目标M1的潜艇机动可行域。显然,在图4中这种情形,我潜艇不具备两个目标同时攻击的立即可攻性,但容易判断,我潜艇对目标M1和M2都具备单独的机动可攻性。即如果仅单独攻击目标M1或M2的话,我潜艇通过机动都可以占领到能够使用武器的射击阵位。
然而,在图4这种态势下,我潜艇是否具有对目标M1和M2同时攻击的机动可攻性则难以判断,它取决于以下两点:一是两个目标的武器射击可行域未来是否会相交;二是若二者能相交,我潜艇能否在它们相交的那段时间内通过机动进入到该相交的区域。如果以上两个条件能满足的话,则可将这种态势称为多目标机动可攻态势。如果其中的任何一个条件不能满足的话,就不具备机动可攻性,即该种态势下,不存在同时攻击这两个目标的可能性。
在不具备多目标立即同时可攻的条件下,是否要追求经过机动占位的同时攻击,显然首先要取决于是否能作出上述机动可攻的判断。依赖人工来进行这一判断(如航海长作图分析)是不太现实的。关键看指控系统是否能提供这一决策支持。如果是的话,则可以考虑实施同时攻击;否则的话,不主张强求。
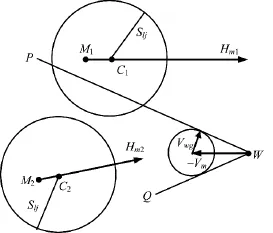
图4 占位可攻的一般多目标态势
事实上,即便是存在一般多目标同时可攻的机会,其攻击的时间和空间“窗口”一般都会非常小,非常难以把握。因此,一般多目标态势下,建议将同时攻击看成是可遇不可求的机会。当出现了立即可同时攻击的机会时,才考虑是否实施同时攻击;否则的话,首先考虑连续攻击的机会。
3.2连续攻击的情形
同编队多目标情况类似,欲对一般多目标态势下的目标进行连续攻击,首先也是要确定首攻目标和次攻目标,然后在此基础上分别分析两个目标的可攻性。与编队多目标情况不同的是,这种条件下两个目标的可攻性不能同时判断。先是要判断首攻目标的可攻性,若目标属机动可攻,则指定针对其的射击阵位,并选取某一占位方案。
首攻目标的占位方案确定后,才能进行次攻目标的相关分析和判断。基本方法是:根据首攻目标的占位机动时间,推算次攻目标在我潜艇完成首攻目标占位和攻击时刻的位置;根据该时刻我潜艇与次攻目标的相对态势,分析次攻目标的可攻性;若其具备机动可攻性的话,指定射击阵位,计算并选取占位方案。下页图5示意性地给出了这一过程。图中M1选为首攻目标,M2为次攻目标。可以看出,M1具备占位可攻性,假定选定其攻击阵位为W',并选取某一机动方案。根据该机动方案可以计算出我潜艇占领该占位所需时间。有了该时间,可以推算出次攻目标M2在我潜艇到达该阵位点发射武器时刻的位置,假定为图中的M'2。对该时刻我潜艇和次攻目标间的态势进行分析,看出次攻目标具有机动可攻性。选取针对次攻目标的射击阵位,如图中的W''。

图5 连续攻击的占位
4 说明
以上仅从战场态势的角度对潜艇攻击多目标的占位问题进行了探讨,从中可以看出其复杂性。实际中可能还要考虑其他的一些因素,如阵位点的武器命中概率、敌方发现我潜艇的概率、发射的武器不要相互干扰、攻击完成后便于我潜艇撤离等,则情况将更加复杂。
有必要提醒的是,所使用的武器不同,武器极限射距圆的半径相差很大。显然,同样态势下,武器极限射距圆半径大对射击阵位选择和占位机动都是非常有利的,甚至使得原本不可攻的态势变成可攻态势、原本无法占位变成可以占位。这一点,潜艇攻击人员要有铭记于心,并在进行攻击机动决策时要结合攻击武器选择予以考虑。
5 结论
本文对潜艇同时对多个敌舰艇目标实施攻击条件下射击阵位选择和占领射击阵位机动的有关问题进行了探讨。从前面的分析可以看出,多目标攻击条件下的占位机动要比单目标攻击时复杂许多,其中一般多目标态势又比编队多目标态势复杂。
潜艇作战人员对此要有足够的认识,以便在平时有针对性地加强训练,摸透其中的规律和实践技巧。在实际攻击过程中对是否要实施多目标攻击则要审慎抉择,而一旦决定实施,就要果断坚决地加以贯彻,并灵活地运用有关规律和技巧。
有关研究人员要在相关作战模型开发和作战系统设计中,充分考虑多目标攻击占位机动的需要。为潜艇多目标攻击过程中的占位机动提供必要、灵活、可靠、友好的辅助功能。
参考文献:
[1]赵正业.潜艇火控原理[M].北京:国防工业出版社,2003.
[2]夏佩伦.潜艇鱼雷攻击占位机动方案的确定与分析[J].火力与指挥控制,2013,38(11):114-117.
[3]夏佩伦,武志东,野学范.潜艇作战多目标感知和跟踪问题研究[J].舰船电子工程,2015,35(9):1-4.
[4]夏佩伦,朱伟良.编队目标的仅方位跟踪[J].电光与控制,2007,14(4):82-84.
[5]BLACKMAN S S.Multiple target tracking with radar applications[M].Norwood,MA:Artech House,1986.
[6]BAR-SHALOM Y,LI X R.Multitarget-multisensor tracking:principles and techniques[M].Storrs,CT:YBS Publishing,1995.
[7]李本昌,刘光,尹文进,潜射鱼雷射击控制方式及有关问题[J].火力与指挥控制,2012,37(11):1-3.
[8]夏佩伦.一种计算尾流自导鱼雷极限射距的方法[J].鱼雷技术,2008,16(2):50-52.
[9]夏佩伦,朱伟良,陈志鹏.尾流自导鱼雷齐射极限射距的计算与分析[J].舰船电子工程,2009,29(5):45-48.
[10]夏佩伦,朱伟良,张靖康.考虑进入角限制的确定尾流自导鱼雷极限射距方法[J].电光与控制,2014,21(3):29-32.
中图分类号:TJ630;E920.2
文献标识码:A
文章编号:1002-0640(2016)04-0104-05
收稿日期:2015-03-24修回日期:2015-04-19
作者简介:夏佩伦(1964-),男,江西吉安人,教授。研究方向:目标跟踪、信息融合和潜艇攻击。
Study of Getting-to-the-firing-position Maneuver for Submarine Attacking Multiple Targets
XIA Pei-lun,WU Zhi-dong,LI Bo
(Navy Submarine Academy,Qingdao 266042,China)
Abstract:This paper studies issues concerning weapon firing position determination and gettingto-the-firing-position maneuver for submarine attacking multiple targets.It emphasizes the influence of multitarget combat scenario and multitarget attack mode on the aforementioned maneuver.It classifies multitarget combat scenario into two categories,formation multitarget and general multitarget. It also divides multitarget attack into two modes,simultaneous attack and sequential attack.Principles for determine weapon firing position and getting-to-the-firing-position maneuver scheme are presented for each combination of the combat scenario categories and the attack modes.
Key words:attack with submarine,multitarget,formation target,getting-to-the-firing-position maneuver
