
仿射不变轮廓矩及其稳定性分析*
2016-08-03 10:18杨晓东
火力与指挥控制 2016年4期
季 超,杨晓东
(海军潜艇学院,山东 青岛 266042)
仿射不变轮廓矩及其稳定性分析*
季超,杨晓东
(海军潜艇学院,山东青岛266042)
摘要:针对区域矩需要计算全图像素的统计分布、计算量大的问题,构造了基于目标形状的仿射不变轮廓矩。首先采用PDE方法推导得到了6个仿射不变矩的数学模型,然后将积分区间变为目标区域的边界,计算得到基于目标形状的仿射不变轮廓矩,最后通过三类舰船不同姿态下的图像进行了实验验证并对其稳定性进行了分析。研究结果表明:仿射不变轮廓矩具有较好的稳健性及区分度,可将其作为不变特征用于舰船目标识别。
关键词:仿射不变轮廓矩,目标识别,仿射变换,稳定性
0 引言
摄像系统对3D空间中的同一目标从不同的角度进行拍摄时,会造成目标相对于摄像系统的方位和姿态发生变化,使得同一目标在摄像系统中具有不同的像。目标成像模型的研究表明[1-2],当三维目标的深度变化相对于相机距离很小时,所获取的形状之间满足仿射变换关系。目标在仿射变换下保持不变的性质或数量称为仿射不变特征,它不受形状采集视点变化和相机内外参数的影响,与其他形状特征量相比,在特征稳健性、区分度和适用范围等方面具有很大的优势[3-4]。
Hu矩于1962年提出之后被广泛应用,上世纪90年代后期,波兰的Flusser给出了二维仿射变换下的不变量,得到4个不变矩用于识别放射变形的物体。国内许多大学和机构对仿射不变矩展开相关研究[5-6]。文献[7]提出用参数方程描述轮廓曲线段的方法,基于格林定理仅利用一次二项式定理推导出轮廓矩的一般表达式。文献[8]通过选代扩展质心和仿射区域划分求得多个仿射区域的扩展质心序列,将扩展质心序列按一定规则组合成一系列三角形,由各个三角形的面积构造不变特征。文献[9]将仿射不变特征用于舰船图像识别,但仅利用了3个不超过3阶的矩。
基于目标灰度分布的区域矩需要计算全图像素的统计分布,计算量大[7]。仿射不变轮廓矩与目标区域的灰度无关,能够有效描述目标的形状信息,在时间和存储空间复杂度方面有优势。本文选取目标区域的边界为积分区间,得到6个4阶以下的基于目标形状的仿射不变轮廓矩,并将其应用于不同姿态下的三类舰船图像。
1 仿射不变矩
仿射不变矩是一个从二维坐标变换到另一个二维坐标的变换,它的全体构成一个群:

其中:①、②为平移变换;③、④为尺度缩放变换;⑤、⑥为斜切变换。
下面采用PDE方法得到仿射不变矩:
假设存在一个仿射不变多项式如下:

仿射不变矩多项式应具备如下4个性质或约束。
1.1比例变换约束
F是一仿射变换,则其应具有比例变换不变性
F具有比例不变性,则有

解得

1.2拉伸变换约束
F是一仿射变换,则其应具有拉伸变换不变性对于拉伸变换

变换后中心矩变为
其中,

F具有拉伸变换不变性必须与δ无关,由式(8)得

解得

1.3对称约束
F是一仿射变换,则其应具有垂直变换不变性对于垂直变换

变换后中心矩变为μ'pq=μqp
式(2)中的F多项式的所有中心矩的左右下标对称,多项式F应该保持不变。即存在:

1.4倾斜变换约束
F是一仿射变换,则其应具有倾斜变换不变性对于倾斜变换

倾斜变换后F'应该与变换参数t无关,即∂F'/ ∂t=0。由于变换后所有μ'pq都会受到t的影响,可以写成多元复合函数导数的形式如下:
可得
代入式(14)中可得:

以上4条性质是一个多项式为仿射多项式的充分必要条件,因此,若满足式(5)、式(10)、式(12)和式(16)时,则此多项式即为仿射多项式,是仿射变换。得到以下6个仿射不变矩:

2 基于目标形状的仿射不变轮廓矩
基于目标灰度分布的区域矩需要计算全图像素的统计分布,计算量大。沿目标轮廓计算矩是一维积分运算,与二维积分的区域矩相比计算量小、效率高,只与目标的形状特征有关,与目标区域的灰度无关。本文将积分区间变为目标区域的边界,计算基于目标形状的仿射不变轮廓矩。
假设图像经边缘提取后变为一幅二值图像,即目标边界的像素灰度值为1,其他像素灰度值为0。几何矩和几何中心矩为:


对于数字图像,相应地有

设目标边界曲线C为光滑的平面曲线,xy坐标缩放同一个比例因子r>0,在新的坐标系中曲线C成为C',则有
由于仿射不变轮廓矩的变化范围较大,为了便于比较,利用取对数的方法进行数据压缩,本文实际采用的不变矩为:

3 实验验证及结果分析
本文借助互联网数据建立了171、115、999三类舰船的三维模型,随机选取三类舰船在不同姿态下的图像200幅,每类取20幅图像,将其编号为17 101,17 102,…,99 901,99 902,…。由于篇幅所限,下页图1给出了三类舰船的部分边缘轮廓图像,文中所有程序均由Vs2010及Opencv2.4.8软件编程实现。
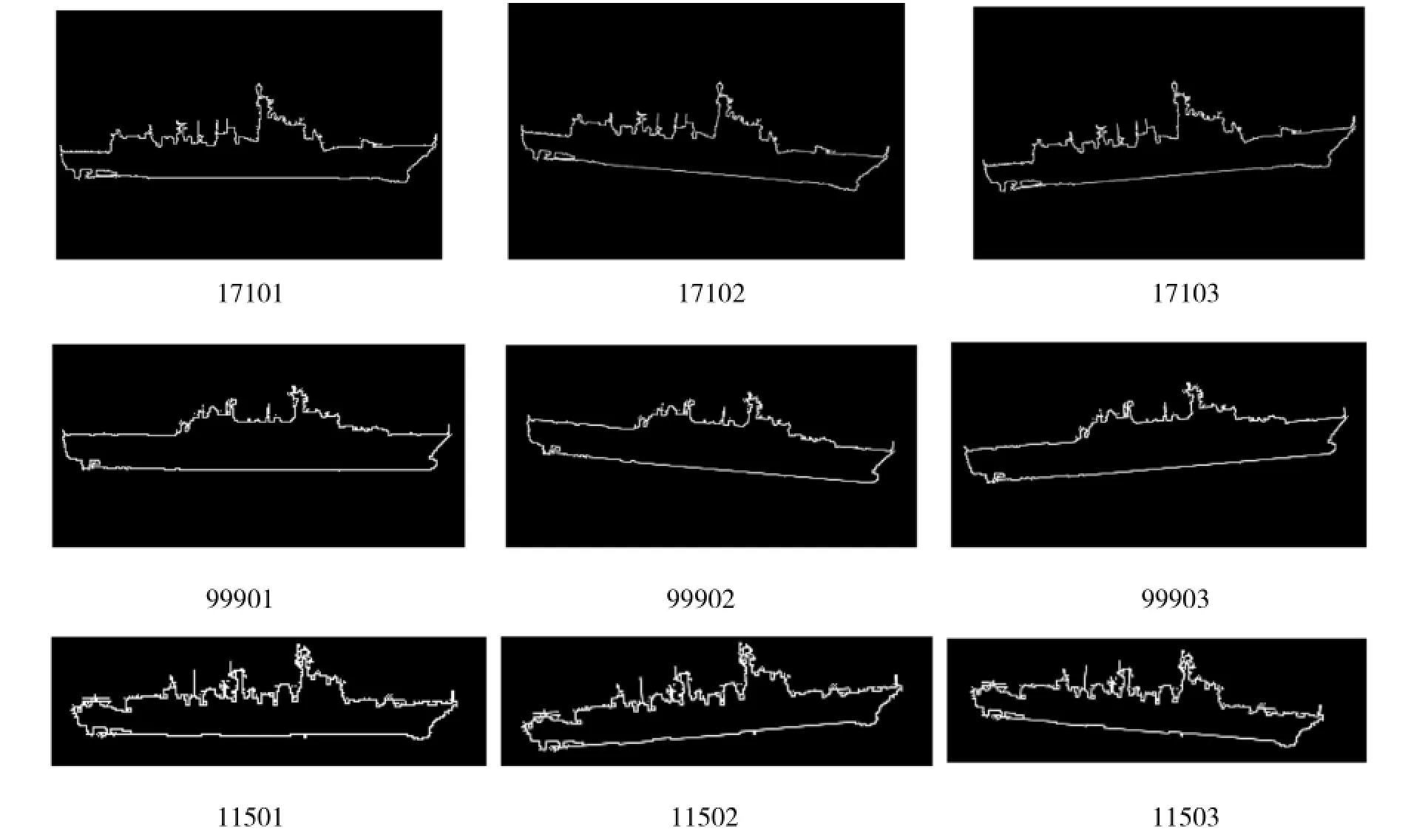
图1 三类舰船部分轮廓图像
首先将获取的舰船目标图像转换为灰度图像,在对其进行二值化处理,然后采用自适应阈值算法[10]实现舰船目标图像的边缘提取,并将目标边缘像素值取1,背景像素值取0。根据式(18)、式(20)及式(22)分别计算三类舰船的仿射不变轮廓矩。表1给出了仿射不变轮廓矩的计算结果。

表1 三类舰船图像的仿射不变轮廓量
由表1的数据可看出:同一舰船目标图像的各仿射不变轮廓矩最大相对误差均控制在5.0%以内,能够保持相对稳定、稳健性好,表明采用仿射不变轮廓矩对舰船目标图像进行描述具有较好的不变性;不同舰船目标图像同一仿射不变矩存在较大差别,可较好区分不同类别的舰船目标,有较好的区分度。仿射不变轮廓矩可作为不变特征用于舰船目标识别。
4 结论
仿射不变特征不随获取图像时视点变化而变
化,是一类重要且应用广泛的不变特征。仿射不变轮廓矩选取目标区域的边界为积分区间,具有计算量小等优点。本文利用6个4阶以下的仿射不变轮廓矩对三类舰船目标图像进行了描述,实验结果显示各仿射不变轮廓矩最大相对误差均控制在5.0%以内,验证了仿射不变轮廓矩具有较好的稳健性。
参考文献:
[1]孙即祥,王晓华,钟山,等.模式识别中的特征提取与计算机视觉不变量[M].北京:国防工业出版社,2001.
[2]张广军.机器视觉[M].北京:科学出版社,2005.
[3]FLUSSER J,SUK T.Pattern recognition by affine moment invariants[J].Pattern Recognition,1993(26):l67-l74.
[4]FLUSSER J,SUK T.A moment-based approach to registration of images with affine geometric distortion[J].IEEE Transactions on GeoScience and Remote Sensing,1994,32 (2):382-387.
[5]邓熠,李智勇,粟毅.仿射不变特征提取算法在遥感影像配准中的应用[J].中国图象图形学报,2009,14(4):615-621.
[6]刘亦书.基于协方差矩阵的仿射不变量[J].小型微型计算机系统,2007,28(7):1282-1286.
[7]于吉红,吕俊伟,白晓明.改进的低阶轮廓矩特征推导方法[J].电光与控制,2013,20(1):1-4.
[8]陈涛,粟毅,蒋咏梅,等.利用仿射几何特性提取图像中的仿射不变特征[J].中国图象图形学报,2007,12(9):1633-1641.
[9]刘新科,于吉红,吕俊伟,等.基于仿射不变矩特征的舰船图像识别方法[J].海军航空工程学院学报,2011,26(6):687-690.
[10]范九伦,赵凤.灰度图像的二维Otsu曲线阈值分割法[J].电子学报,2007,35(4):751-754.
[11]刘进.张天序.图像不变矩的推广[J].计算机学报,2004,27(5):668-674.
[12]FLUSSER J.On independence of rotation moment invariants [J].Pattern Recognition,2000(33):1405-1410.
中图分类号:TP391.4
文献标识码:A
文章编号:1002-0640(2016)04-0073-04
收稿日期:2015-03-14修回日期:2015-04-27
*基金项目:“十二五”军内预研基金资助项目
作者简介:季超(1987-),男,山东济宁人,博士研究生。研究方向:潜艇航行安全技术。
Summary of Military Electric Drive Vehicle Hybrid System Power Management Technology
JI Chao,YANG Xiao-dong
(Navy Submarine Academy,Qingdao 266042,China)
Abstract:Region moments needs to compute the statistical distribution of all the image pixels with the large amount of calculation.In order to solve these problems,affine invariant contour moments are constructed which are based on the shape of the object.Firstly,six mathematical models of affine invariant moments are obtained by the method of PDE.Then the interval of integration is changed into the object's boundary and affine invariant contour moments are calculated.Finally,experiments are verified through the images of three types of ship under different attitudes and the stability analysis is proceeded.Results indicate that affine invariant contour moments have good robustness and discrimination,and they can be used as invariant features for ship target recognition.
Key words:affine invariant contour moments,target recognition,affine transformation,stability
猜你喜欢
昆明医科大学学报(2022年3期)2022-04-19
有色金属(矿山部分)(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
矿产勘查(2020年9期)2020-12-25
新农业(2018年3期)2018-07-08
中国水运(2016年11期)2017-01-04
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
科学与财富(2016年28期)2016-10-14
