
一种新的数据融合方法
——广义融合法*1
2016-08-01 11:44魏彦飞耿建平施浒立李景景徐希坤
天文研究与技术 2016年3期
关键词:数据融合
魏彦飞,耿建平,施浒立,李景景,李 林,徐希坤
(1. 桂林电子科技大学电子工程与自动化学院,广西 桂林 541004;2. 中国科学院国家天文台,北京 100012;3. 北京日月九天科技有限公司,北京 100012;4. 中原工学院电子信息学院,河南 郑州 450007)
一种新的数据融合方法
——广义融合法*1
魏彦飞1,2,耿建平1,施浒立2,3,李景景4,李林2,徐希坤1
(1. 桂林电子科技大学电子工程与自动化学院,广西 桂林541004;2. 中国科学院国家天文台,北京100012;3. 北京日月九天科技有限公司,北京100012;4. 中原工学院电子信息学院,河南 郑州450007)
摘要:数据融合的目的是合并或者综合多个数据集,成为一个完整的性能更好的数据集。基于广义延拓插值外推法提出建立两组或两组以上方程解集和数据序列融合优化的数学模型,称之为广义融合法,此方法能充分发挥数据和量测资源的潜力,运用创新的集成和互校算法,解决数据融合面临的难题。介绍了广义融合数学模型的建立和求解方法的主要步骤;对模型中权值的分配原则做了分析;最后应用于卫星导航数据处理领域。实验证明该方法实用性好,数据平稳性好,外推稳定度高,有望成为一种新的解决数据融合问题的普适求解方法。
关键词:数据融合;广义融合;广义延拓外推;模型求解;权值分配;卫星导航数据处理
数据融合(也叫信息融合)的概念始于20世纪70年代,至80年代其技术取得了一定的进步和发展,到90年代不少数据融合技术的研究成果已得到实际应用,取得了理想的效果[1]。数据融合的主要原理是用多个传感器(同质或异质的)对同一对象进行描述,得到该对象的多源观测数据,将这些数据进行集成,以获得对被控对象的更好的理解[2]。
多传感器信息融合技术是近几年发展起来的一门实践应用技术,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的技术[3]。对于多传感器系统,由于信息的多样化和复杂性,因此,信息融合方法的基本要求是具有强大的处理能力,以及较高的计算速度和精度。人工智能的发展使信息融合技术走向智能化、集成化。
数据融合的目的是合并或合成多个数据集,成为一个完整的性能更好的数据集。数据融合技术的实现,关键在于融合算法[4-5]。在融合求解过程中,不是仅仅把数据或解集简单地直接组合,这样做效果不会很明显,甚至最后得到的结果更差。为了能够得到良好的融合效果,应该分析各组方程解或多组数据集序列的特征。比如一些数据序列的随机误差较小但偏差较大;一些数据的随机误差较大但偏差较小[6-7]。这样就可以将随机误差较小的数据序列的相对变化量通过一定的方法融合到随机误差较大的数据序列中,能获得随机误差较小且偏差也较小的数据序列。本文基于广义延拓插值外推法[8]提出了一种求解一类特定的关联群方程组的多个离散数据集或最优融合估计集的方法,称之为广义融合方法。经过实验证明,该方法实用性好,数据平稳性好,外推稳定度高,已应用于卫星导航定位数据处理领域。
1广义延拓插值外推法
广义融合是基于广义延拓插值外推法提出的,因此,先介绍广义延拓插值外推法。广义延拓插值外推法的基本设计理念是[9]:分段实施最小二乘逼近,在每段的端点处采用插值处理,在段内采用拟合处理,段内拟合逼近处理时,用邻近延拓域里的数据进行辅助拟合处理,从而使逼近多项式在定义域内的逼近精度升高;当分段连接后,在连接端点处过渡平滑,在整域上逼近精度比较好。广义延拓最小二乘逼近方法的外推模型兼融了插值和拟合两大功能,具有极好的逼近精度。外推示意图见图1。

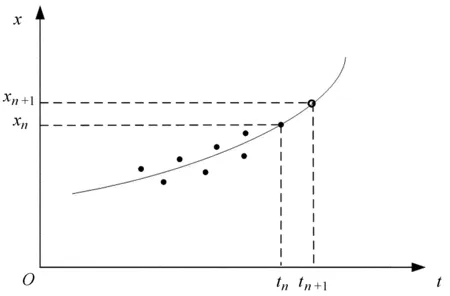
图1广义延拓外推示意图
Fig.1Generalized extrapolation diagram
(1)
其中,minI(a1、a2、a3)为逼近残差极小化目标函数;a1、a2、a3为待求的系数;s.t.示意约束条件。求解模型(1),可以优化获得广义延拓逼近多项式的待求系数a1、a2、a3;代入(2)式:
(2)
2广义融合方法的数学模型及其求解方法
2.1广义融合方法数学模型的建立

构造广义融合最优化求解模型,求a1、a2、a3,使满足:
(3)

2.2广义融合方法的求解步骤
2.2.1求解状态量值
建立残差极小化优化模型并加约束方程,如下式:
(4)
其中,F(xi)为状态量关系式,多数情况下为非线性函数关系,可以采用非线性算法直接求解;xi为函数状态变量;Yi为测量量;i为历元序号;n为当前历元数;f(xn)为约束函数关系式。(4)式可以采用非线性算法求解,如单纯形法等。通过搜索、比较等步骤,使目标函数值不断逼近最优点。求解方法在优化过程中不受方程个数的限制,并且具有简单直观、适应性强、应用范围广、解决速度快等特点。

(5)

(6)
2.2.4求解一组优化的最优估计值解
3广义融合模型之中权值分析

用仿真验证方法的可行性,即生成两组数据:一组数据随机误差较大但偏移较小(随机误差-3-3,偏差为1);另一组随机误差较小但有较大的偏移(随机误差-1-1,偏差为3)。数据生成后代入广义融合求解模型,选取不同的4对权值进行组合分析,所得结果如图2。

图2(a)k1=1、k2=0时最优估计值偏移;(b)k1=0.7、k2=0.3时最优估计值偏移;(c)k1=0.3、k2=0.7时最优估计值偏移;(d)k1=0、k2=1时最优估计值偏移
Fig.2(a)k1=1,k2=0, offset of optimal estimation; (b)k1=0.7,k2=0.3, offset of optimal estimation; (c)k1=0.3,k2=0.7, offset of optimal estimation; (d)k1=0,k2=1, offset of optimal estimation
从图2(a)、 (b)、 (c)、 (d) 4幅图可以看出:当k1逐渐减小而k2逐渐增大时,状态量的最优估计值开始远离状态测量值向预估值逼近;随着k1越来越小,k2越来越大,这种现象更加明显。在数据处理过程中,如果有一组数据序列的某些测量量发生突跳导致数据不准确时,便可以通过改变权值组合来降低这些突跳数据对获取最优估计值的贡献,使获得的最优估计值更加平稳。
4广义融合方法在卫星导航中的应用及仿真与实测分析
4.1广义融合在卫星导航中的应用
以卫星定位导航为例说明采用广义融合方法的实用性:卫星导航定位解算出用户的位置坐标为x、y、z3个方向,本文只对一个方向的用户位置作详细分析,其余两个方向使用相同方法修正即可获得用户位置的完整坐标。
4.1.4获得经优化的一组最优估计值解

4.2仿真
4.2.1广义融合对突跳数据的修正
卫星定位系统的精度主要取决于两方面: 一是观测卫星在空间的分布情况,通常称为卫星分布几何衰减因子; 二是各观测量的精度[11]。大气层干扰、对流层延迟改正后的残差、星历误差及多路径效应等影响导致最后的测量数据产生偏差或是突跳,而广义融合方法能够很好地修正这些误差数据。现生成一组随机误差在(-0.5-0.5)的数据,分别在第10、20、30、40 4个点处加上较大的偏移量构成突跳点,然后用广义融合方法对这组数据进行处理,仿真结果如图3。
由图3可以看出,广义融合法对4个突跳点的数据都做了实时修正,其结果不但在没有发生突跳的部分很好地遵循了原始测量值的变化规律,而在有突跳的时段,也能有效排除突跳的影响。
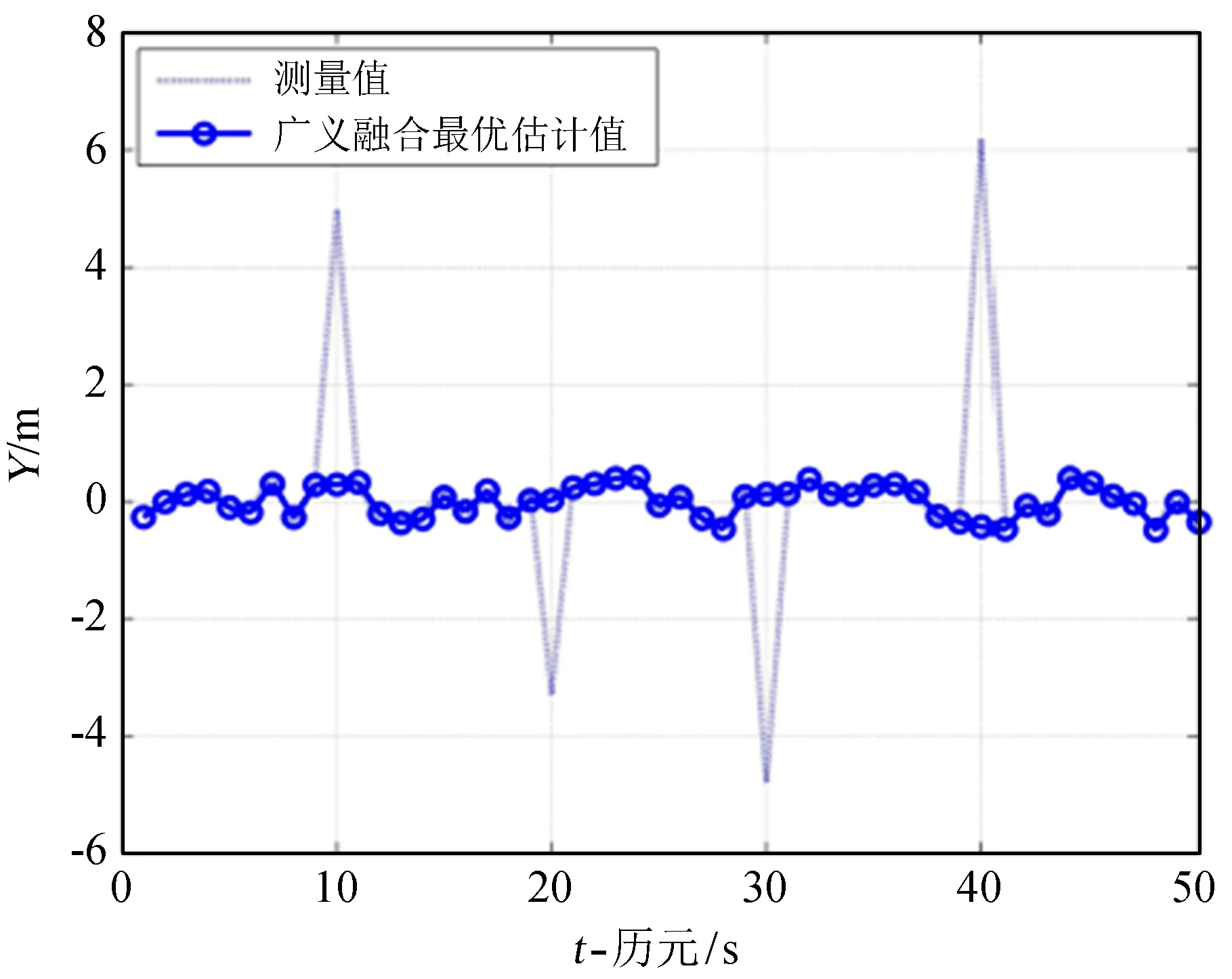
图3广义融合对突跳数据的修正
Fig.3Correction of the data of sudden jump with generalized fusion
4.2.2最小二乘拟合法与广义融合法对误差数据处理对比
在卫星数目多于4颗,各测量值之间相互独立且符合高斯正态分布的情况下,采用最小二乘算法解算接收机的三维坐标是最经典的办法。因为最小二乘算法能使各观测伪距之间的残差平方和最小,从而使获得的估计值解达到最优。但是多路径效应等因素产生的误差却时刻影响其定位精度,这导致各实际测量值之间并不是相互独立,甚至有些情况下不符合正态分布,这时若仍采用最小二乘算法就很难保证最后能获得最优估计值解[12],而广义融合法在此种情况下依然适用。
下面通过仿真实验验证此方法的有效性。令测量值的理论值为50,这时在理论值的基础上加噪声生成一组带有随机误差的数据,作为测量仿真计算数据,为了便于体现广义融合法的优越性,分别用广义融合法和最小二乘算法对这组数据进行处理,修正后的效果如图4。
经计算,得到最小二乘拟合值的标准差为σ=3.626 396 349 003 966,广义融合最优估计值的标准差为σ=0.758 068 193 045 756,广义融合法稳定程度要比最小二乘拟合法提高大约79%(图4);而且广义融合法的偏差也较小,误差数据的修正值更加靠近理论值。
4.2.3实测数据分析
(1)2015年5月11日在中国科学院国家天文台用中科微ATGM332D卫星定位芯片的接收机做动态测试。从最终获取的接收机三维坐标中截取Y方向上一段带有明显突跳的原始定位数据和对应时刻的原始速度值,分别用广义融合法和最小二乘拟合法对其进行处理,结果如图5。

图4最小二乘拟合法与广义融合法对误差数据处理的对比
Fig.4Comparison of error data processed by the least squares fitting method and the generalized fusion method
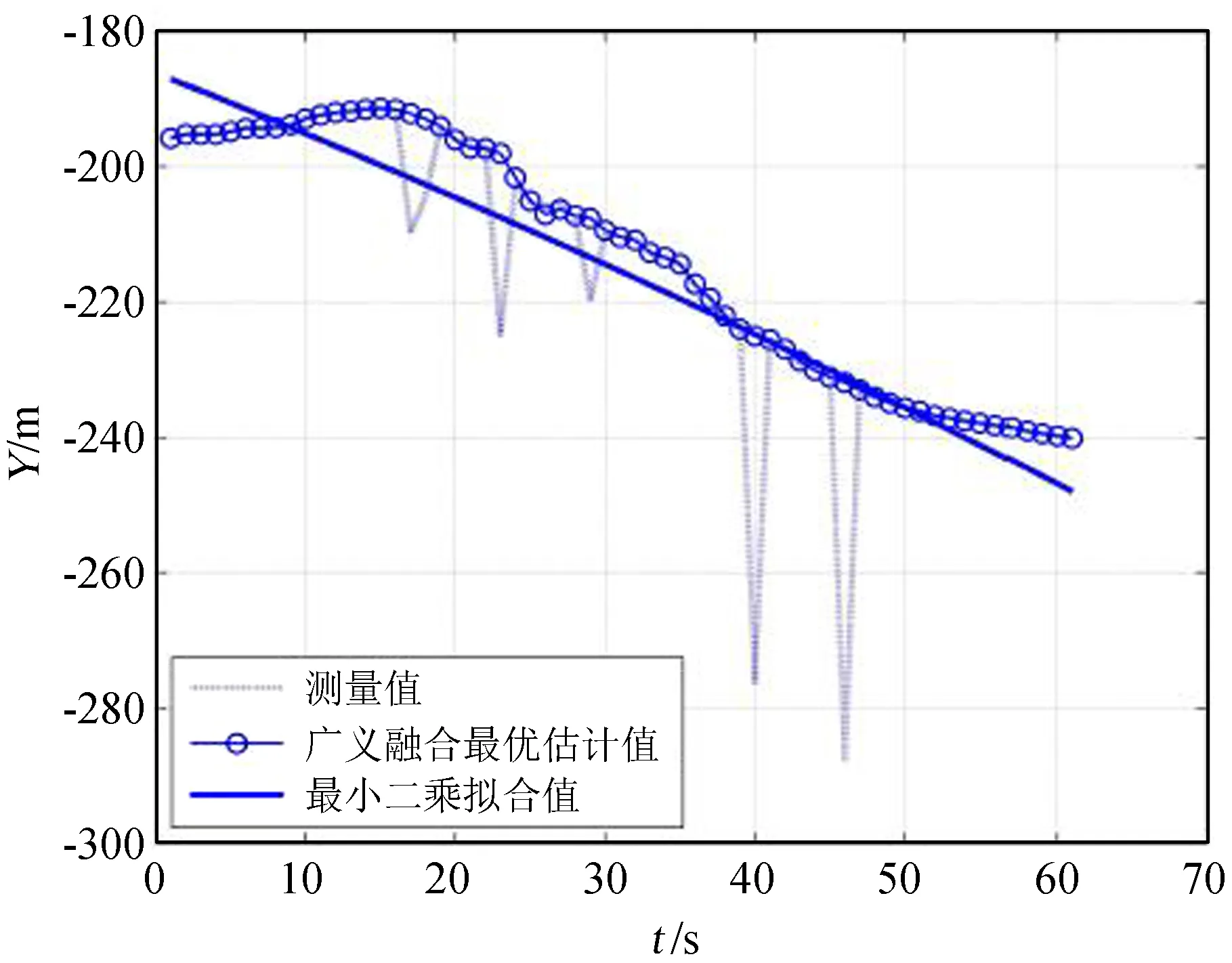
图5广义融合法和最小二乘拟合法对实测数据处理的对比
Fig.5Comparison of measured data processed by both the generalized fusion method and the least square fitting method
由图5可以看出最小二乘拟合法对某些突跳点并没有很好的修复作用,只是在少数点处遵循了原始数据的变化规律,但是整体数据偏离了实测数据;而广义融合法能实时修正原始数据中的坏数据,并且在没有发生突跳的部分很好地跟随原始数据的运动轨迹。
(2)当代社会对时频基准的要求越来越高,氢原子钟、铯原子钟等多种高精度时频基准已被相继研发出来。然而还可以通过另外一种方法获得更高精度和稳定度的时频基准,那就是组合处理和精细加工原子钟组的输出数据,获得性能更优良的时频输出数据。本文把氢原子钟与铯原子钟的输出数据用广义融合法融合起来。图6(a)显示了铯原子钟与氢原子钟输出的频率数据变化图,通过对比可以发现铯原子钟频率的随机误差偏大,但长期稳定度很好;而氢原子钟则不同,它随机误差的幅度很小,本文针对卫星导航定位数据中出现的坏数据,尤其是突跳数据的修正,在广义延拓插值外推法的基础上提出了一种新的数据融合方法——广义融合法。通过仿真和实测数据分析,与最小二乘算法进行对比后得出:广义融合法较最小二乘拟合法更能够修复定位数据中产生的突跳数据;广义融合法比最小二乘拟合法对数据的处理可靠性更高;广义融合法实用性好,数据平稳性好,外推稳定度高,有望成为一种新的解决数据融合问题的普适求解方法。

图6(a) 氢钟、铯钟时频数据对比;(b) 广义融合前后时频数据对比
Fig.6(a) Frequency data of hydrogen and cesium clock; (b) Comparison of time frequency before and after the generalized fusion
但是随着时间的增长其频率出现很明显的漂移。广义融合法能把这两种原子钟的频率特性的优势组合起来,从而获得随机误差小并且长期稳定度好的时频基准。用这一方法对国家授时中心的铯原子钟和氢原子钟输出的时频数据进行融合处理,用氢钟时频的变化率修正铯钟的时频输出,处理结果见图6(b)。
5结论
参考文献:
[1]王栋. 基于数据融合的机载多传感器目标识别[D]. 上海: 上海交通大学, 2010.
[2]王炯琦, 周海银, 吴翊. 基于最优估计的数据融合理论[J]. 应用数学, 2007, 20(2): 392-399.
Wang Jiongqi, Zhou Haiyin, Wu Yi. The theory of data fusion based on state optimal estimation[J]. Mathematica Applicata, 2007, 20(2): 392-399.
[3] 石忠, 霍星. 多传感器信息融合技术在INS/GPS组合导航系统中的应用[J]. 渤海大学学报: 自然科学版, 2008, 29(4): 403-407.
Shi Zhong, Huo Xing. Application of multi-sensor information fusion technique in INS/GPS integrated navigation system[J]. Journal of Bohai University: Natural Science Edition, 2008, 29(4): 403-407.
[4]Shang Lin, Liu Guohua, Zhang Rui, et al. An information fusion algorithm for integrated autonomous orbit determination of navigation satellites[J]. Acta Astronautica, 2013, 85: 33-40.
[5]Ning Xiaolin, Fang Jiancheng. An autonomous celestial navigation method for LEO satellite based on unscented Kalman filter and information fusion[J]. Aerospace Science and Technology, 2007, 11(2-3): 222-228.
[6]Tzschichholz T, Boge T, Schilling K. Relative pose estimation of satellites using PMD-/CCD-sensor data fusion[J]. Acta Astronautica, 2015, 109: 25-33.
[7]Wang Xinlong, Zhang Qing, Li Hengnian. An autonomous navigation scheme based on starlight, geomagnetic and gyros with information fusion for small satellites[J]. Acta Astronautica, 2014, 94(2): 708-717.
[8]施浒立, 颜毅华, 徐国华. 工程科学中的广义延拓逼近法[M]. 北京: 科学出版社, 2005.
[9] 耿建平, 衣伟, 刘成, 等. 基于广义延拓外推的单频周跳检测与修复方法[J]. 天文研究与技术, 2015, 12(2): 174-182.
Geng Jianping, Yi Wei, Liu Cheng, et al. A new method for detection and correction of single-frequency cycle slipsusing data extrapolationbased on the method of generalized extended interpolation[J]. Astronomical Research & Technology, 2015, 12(2): 174-182.
[10]施浒立, 黄康, 衣伟, 等. 一种新的逼近滤波方法: 中国, 201410208791.7[P]. 2014-08-06.
[11]何瑞珠, 刘成, 黄康. 卫星定位中的一种分步加权解算方法[J]. 天文研究与技术, 2015, 12(1): 36-43.
He Ruizhu, Liu Cheng, Huang Kang. A method of multiple-step Weighted Least-Square estimate for satellite positioning[J]. Astronomical Research & Technology, 2015, 12(1): 36-43.
[12]朱丽梅, 张绪春. 高动态卫星接收机定位高程超差问题分析[J]. 海军航空工程学院学报, 2010, 25(2): 203-207.
Zhu Limei, Zhang Xuchun. Analysis of the positioning error on elevation during the high dynamic envenoming[J]. Journal of Naval Aeronautical and Astronautical University, 2010, 25(2): 203-207.
*基金项目:国家自然科学基金 (61271284);广西自然科学基金 (2014GXNSFAA118393);桂林电子科技大学研究生教育创新计划项目 (GDYCSZ201483) 资助.
收稿日期:2015-08-24;
修订日期:2015-09-25
作者简介:魏彦飞,男,硕士. 研究方向:数据处理、导航定位. Email: 729680894@qq.com
中图分类号:TN96
文献标识码:A
文章编号:1672-7673(2016)03-0318-08
A New Method of Data Fusion——the Generalized Fusion Method
Wei Yanfei1,2, Geng Jianping1, Shi Huli2,3, Li Jingjing4, Li Lin2, Xu Xikun1
(1. Electronic Engineering and Automation College, Guilin University of Electronic Technology, Guilin 541004, China; 2. National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China, Email: 729680894@qq.com; 3. Beijing Ri Yue Jiu Tian Technology Co., Ltd, Beijing 100012, China; 4. Electronic Information College, Zhongyuan University of Technology, Zhengzhou 450007, China)
Abstract:The purpose of data fusion is to merge or synthesize two data sets so as to make them become a better and complete data set. Based on extended inter-polation method, generalized fusion method is a method which strives to create a mathematical model that consists of two or more sets of equation and data sets. This method is not only able to bring out its full potential of data and measurement resources, but also capable of using innovative integration and mutual algorithm to solve the data fasion problem. After simulation and real measurement data analysis, conclusion can be drawn that compared with the least square algorithm, the generalized fusion method is more suitable for the repair of the data generated in the process of data fusion.This paper also introduces the main steps of the establishment and the solution of the generalized mathematical model, analyzes the distribution principle of weight in the model and its application in the field of satellite navigation data processing. Experimental results show that the method is practical and stable, and it is expected to be a new method for solving the problem of data fusion.
Key words:Data fusion; Generalized fusion; Generalized extrapolation; Model solving; Weight distribution; Satellite navigation data processing
CN 53-1189/PISSN 1672-7673
猜你喜欢
现代电子技术(2016年24期)2017-01-19
东方教育(2016年10期)2017-01-16
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年14期)2016-06-08
科技视界(2016年3期)2016-02-26
物联网技术(2015年11期)2015-11-26
物联网技术(2015年11期)2015-11-26
物联网技术(2015年8期)2015-09-14
物联网技术(2015年5期)2015-07-18
物联网技术(2015年4期)2015-04-27
