MEMS陀螺随机误差特性研究及补偿
2016-08-01 09:06:55张玉莲储海荣张宏巍张明月李银海
中国光学 2016年4期
张玉莲,储海荣,张宏巍,张明月,陈 阳,李银海
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
MEMS陀螺随机误差特性研究及补偿
张玉莲*,储海荣,张宏巍,张明月,陈阳,李银海
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
摘要:为了提高MEMS陀螺输出角速度的精度,采用Allan分析法以及Kalman滤波算法对MEMS陀螺仪进行随机误差分析和补偿。由Allan方差分析陀螺的输出数据,对Allan方差进行最小二乘法拟合,得到各项随机噪声的定量评价指标;对陀螺的输出数据使用AR模型进行数学建模,采用AIC准则确定了AR模型的阶次,建立了陀螺零漂数据的离散时间表达式;在AR模型所建立的陀螺随机误差模型的基础上,设计了Kalman滤波器,对陀螺输出数据使用Kalman算法进行了滤波处理,对陀螺的随机误差进行了补偿;通过Allan方差对Kalman算法对陀螺随机误差的补偿效果进行分析。实验结果表明:角速率随机游走Kalman滤波前为0.148 ,Kalman滤波补偿后为,通过补偿可减小97.24%的角速率随机游走误差;零偏不稳定性Kalman滤波前为1.940 8°/h,Kalman滤波补偿后为0.054 2°/h,通过补偿可减小97.21%的零偏不稳定性误差;速率随机游走Kalman滤波前为2.698 ,Kalman滤波补偿后为0.334 ,通过补偿可减小87.61%的速率随机游走误差。Kalman滤波适用于MEMS陀螺的滤波处理,可有效降低陀螺的随机误差。
关键词:MEMS陀螺;随机误差;Allan方差;AR模型;Kalman滤波
1引言
武器系统中的捷联惯导系统(SINS)一般采用MEMS陀螺仪来获取飞行器的角速度信息。MEMS陀螺具有成本低、体积小、功耗低、重量轻及可靠性高等优势[1-3],在无人机、精确制导导弹等领域具有广泛的应用前景。
目前,与光纤陀螺和激光陀螺相比,MEMS陀螺的精度较低[4],由于传感器的噪声、漂移及刻度因数非线性等影响会造成陀螺输出产生较大的误差[5],并且MEMS陀螺的精度会随着时间的延长而降低,这些误差会作为捷联惯导系统中惯导解算的误差源,影响飞行器的姿态解算精度,从而引起较大的航向误差[6]。
影响MEMS陀螺精度的误差主要有确定性误差和随机误差,确定性误差作为系统误差,可以通过标定等环节加以消除[7],而随机误差没有明显的规律,是限制MEMS陀螺精度提高的主要瓶颈。因此MEMS陀螺的随机误差辨识及补偿是提高陀螺精度的重要途径。
MEMS陀螺随机误差辨识主要有自相关分析法、功率谱密度、Allan方差等方法。自相关分析法的数据采集时间特别长,有时甚至超过仪器寿命[8];功率谱密度是随机误差的频域分析方法,很难通过分析功率谱密度函数将随机误差分离出来[9];而Allan方差分析法能够很容易地对各类误差源进行细致的表征和辨识[10],具有便于计算和分离等优点。对于改善陀螺的性能,传统的数字滤波器存在实时性不高,处理过程过于简单等缺点。本文采用Kalman滤波方法对陀螺数据进行滤波补偿,提高了陀螺性能补偿的精度和效率。
Allan方差是由David Allan提出的,该方法最初是为了分析振荡器的相位和频率的不稳定性,是一种时域分析方法[11]。陀螺等惯性器件具有振荡器的特征,该方法已被应用于惯性传感器的随机误差辨识。Allan方差分析方法能够准确地将陀螺的量化噪声、角度随机游走、零偏不稳定性、角速率随机游走和速率斜坡等各项随机误差分离开来,是对陀螺随机噪声进行分类分析的最佳方法[12]。并且,Allan方差可以定量比较不同陀螺的各项随机误差性能指标,同时还可以作为滤波算法对陀螺随机误差补偿结果的评价依据。
本文依据Allan方差分析原理,以实际测试中的零偏稳定性测试数据为例,实现MEMS陀螺随机误差特性分析,采用AR模型对陀螺输出数据进行建模,对MEMS陀螺的随机误差进行补偿。随机误差补偿采用Kalman滤波算法,形成了MEMS陀螺随机误差特性研究及补偿的系统方法。
2MEMS陀螺随机误差的Allan方差
2.1Allan方差分析
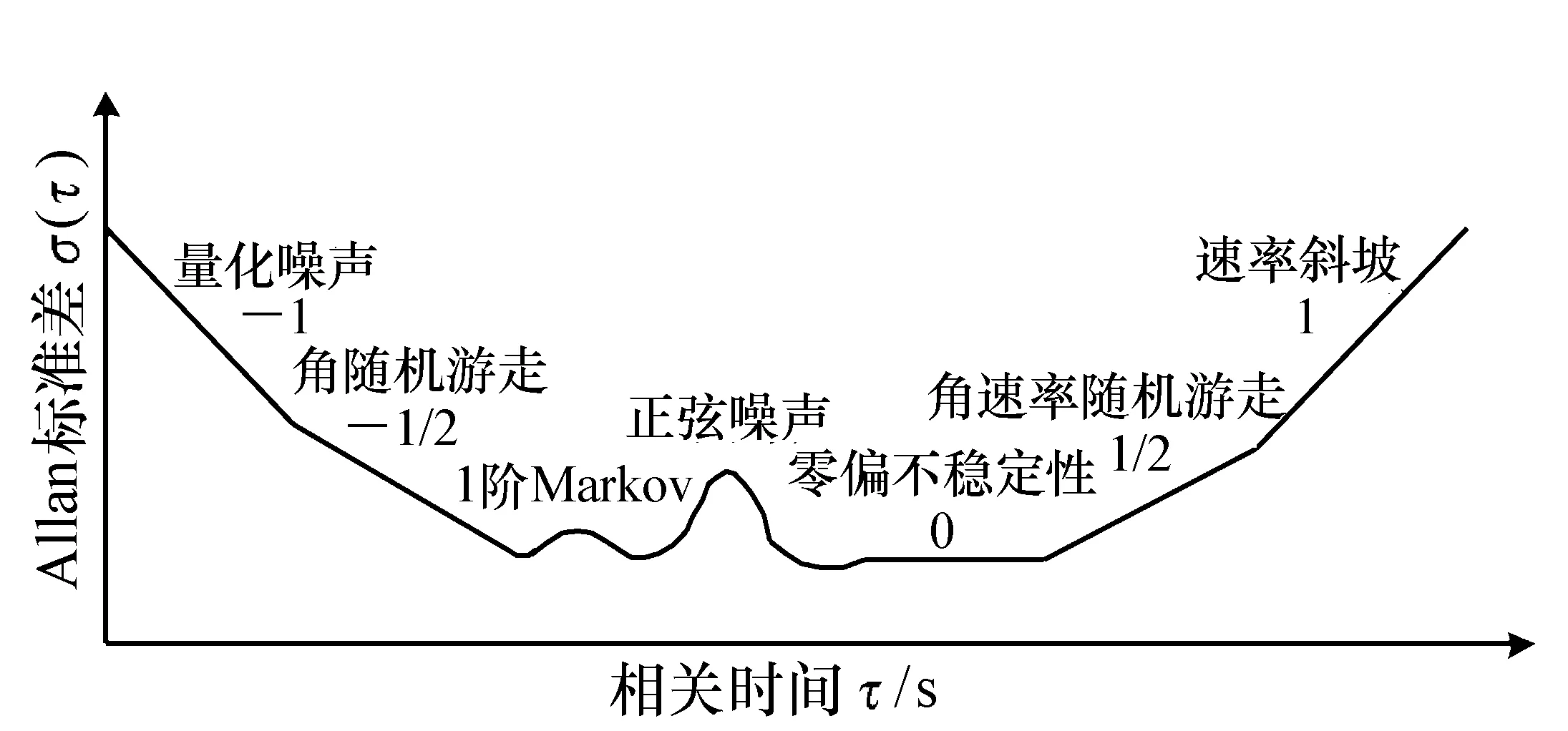
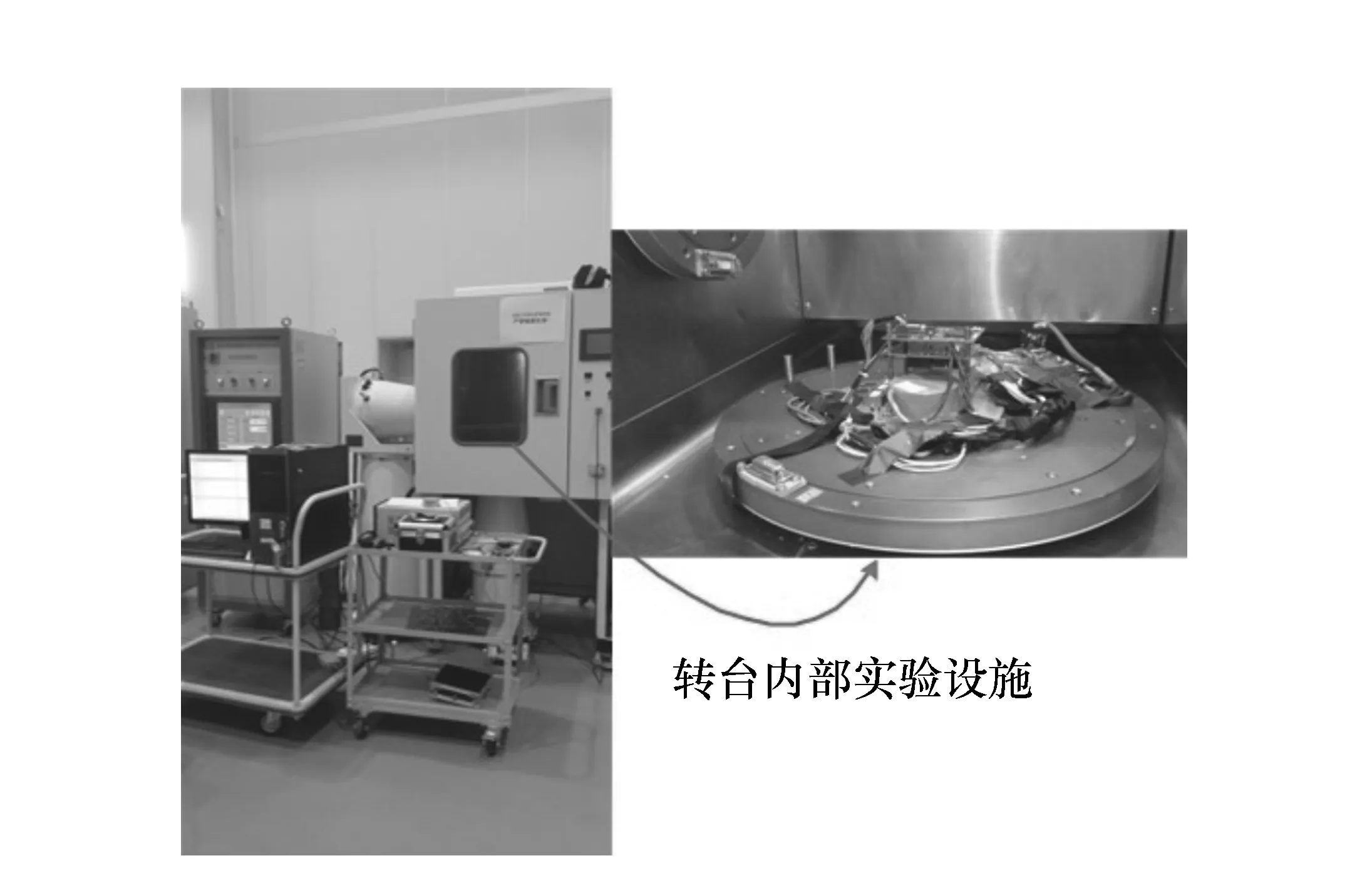
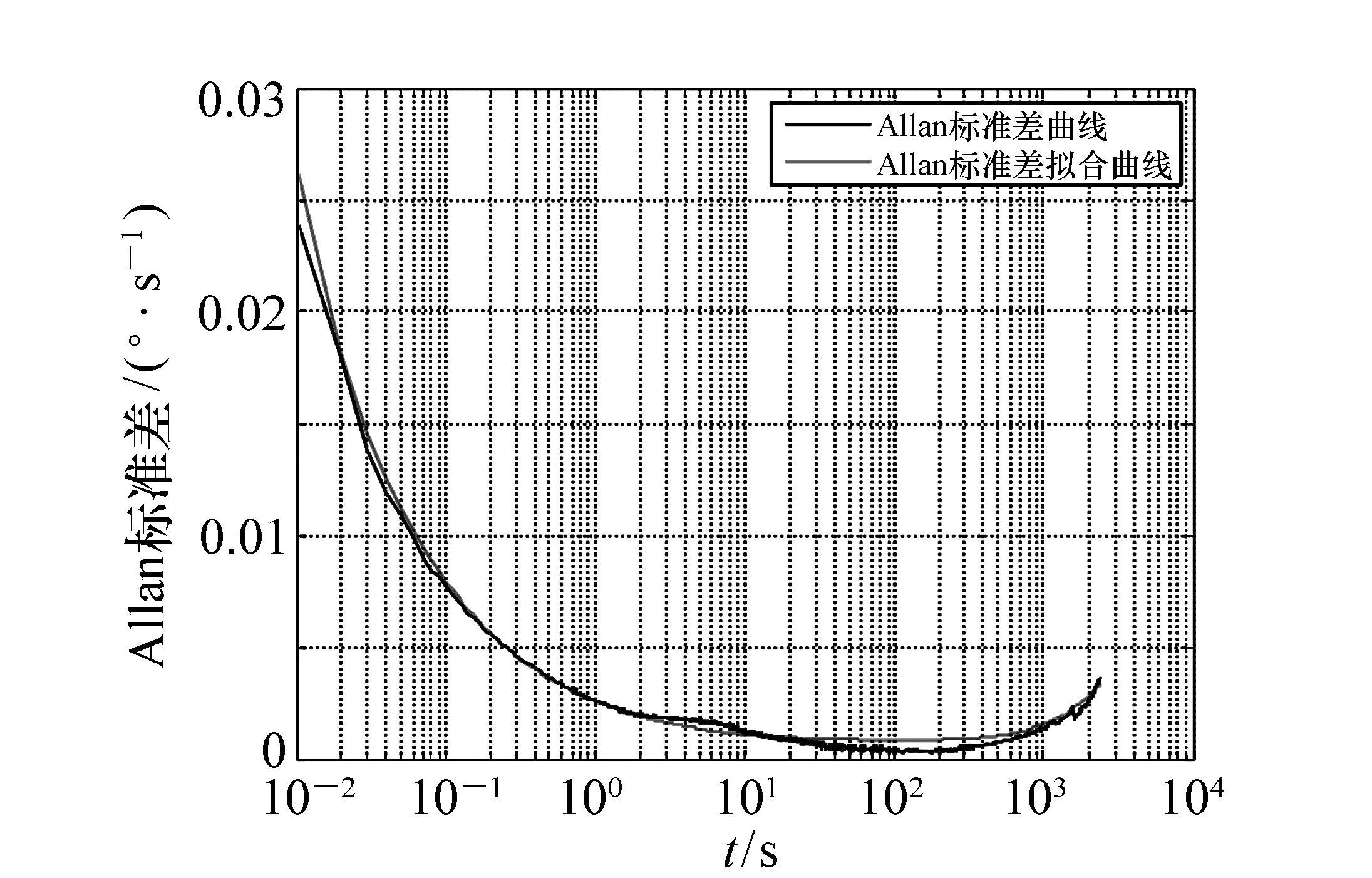
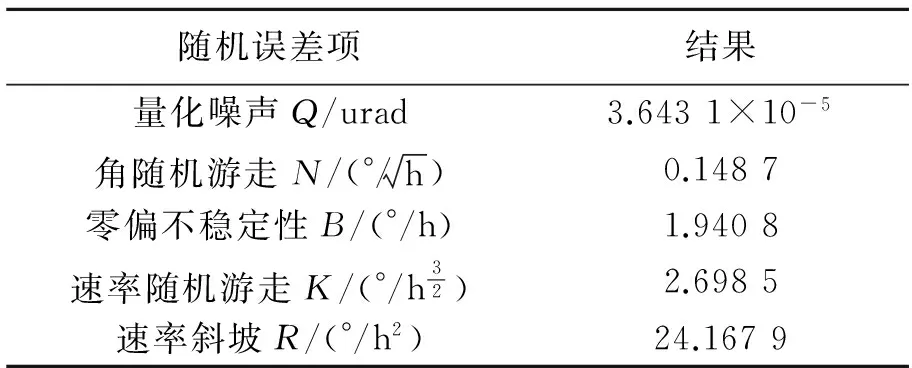
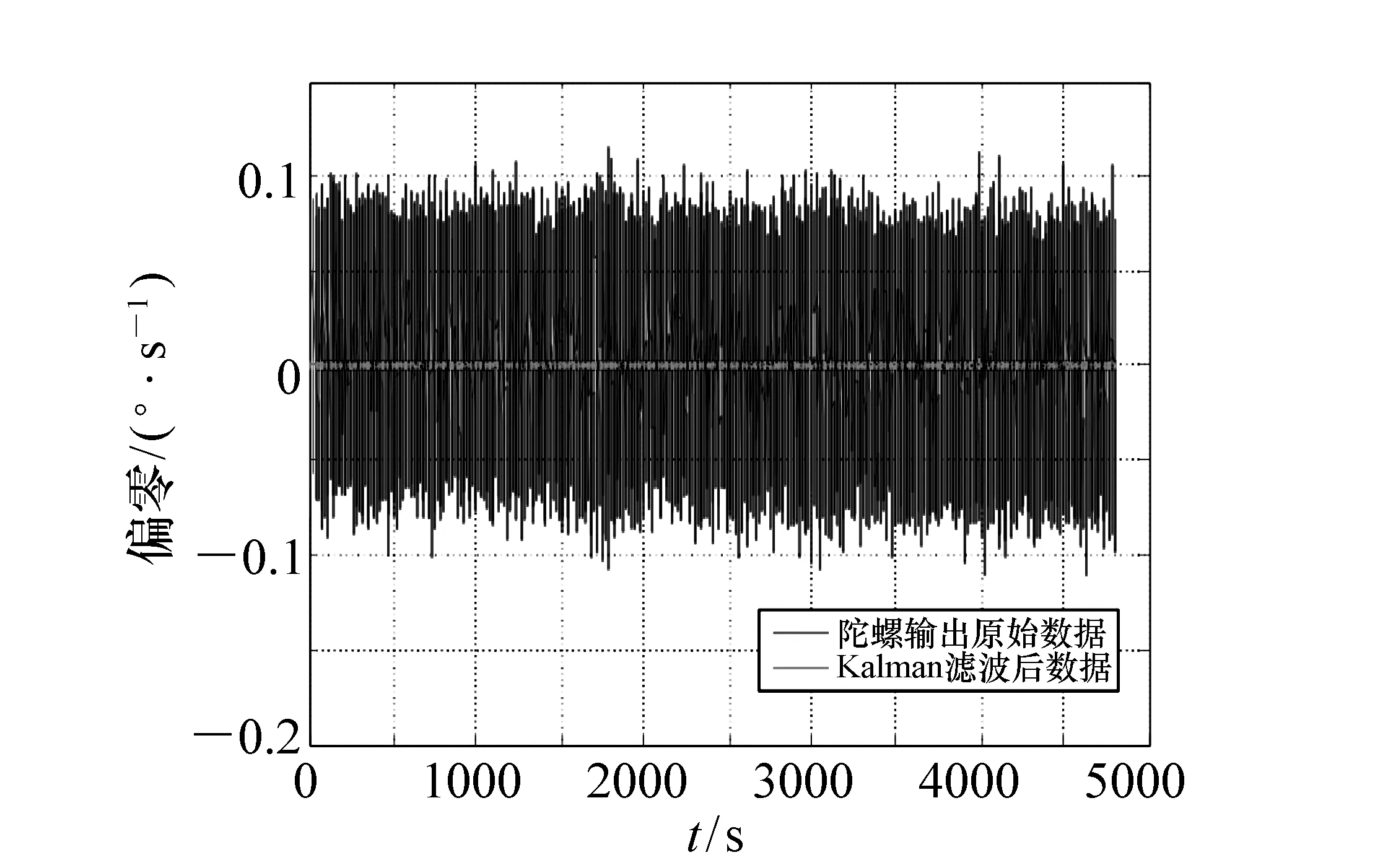
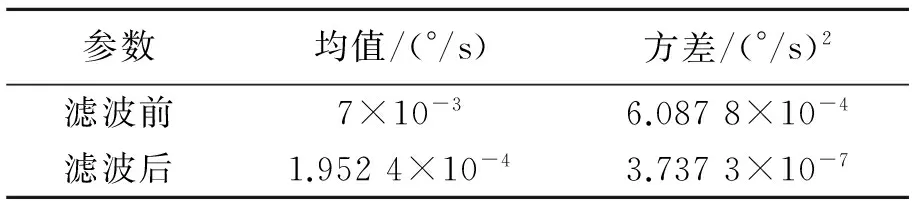
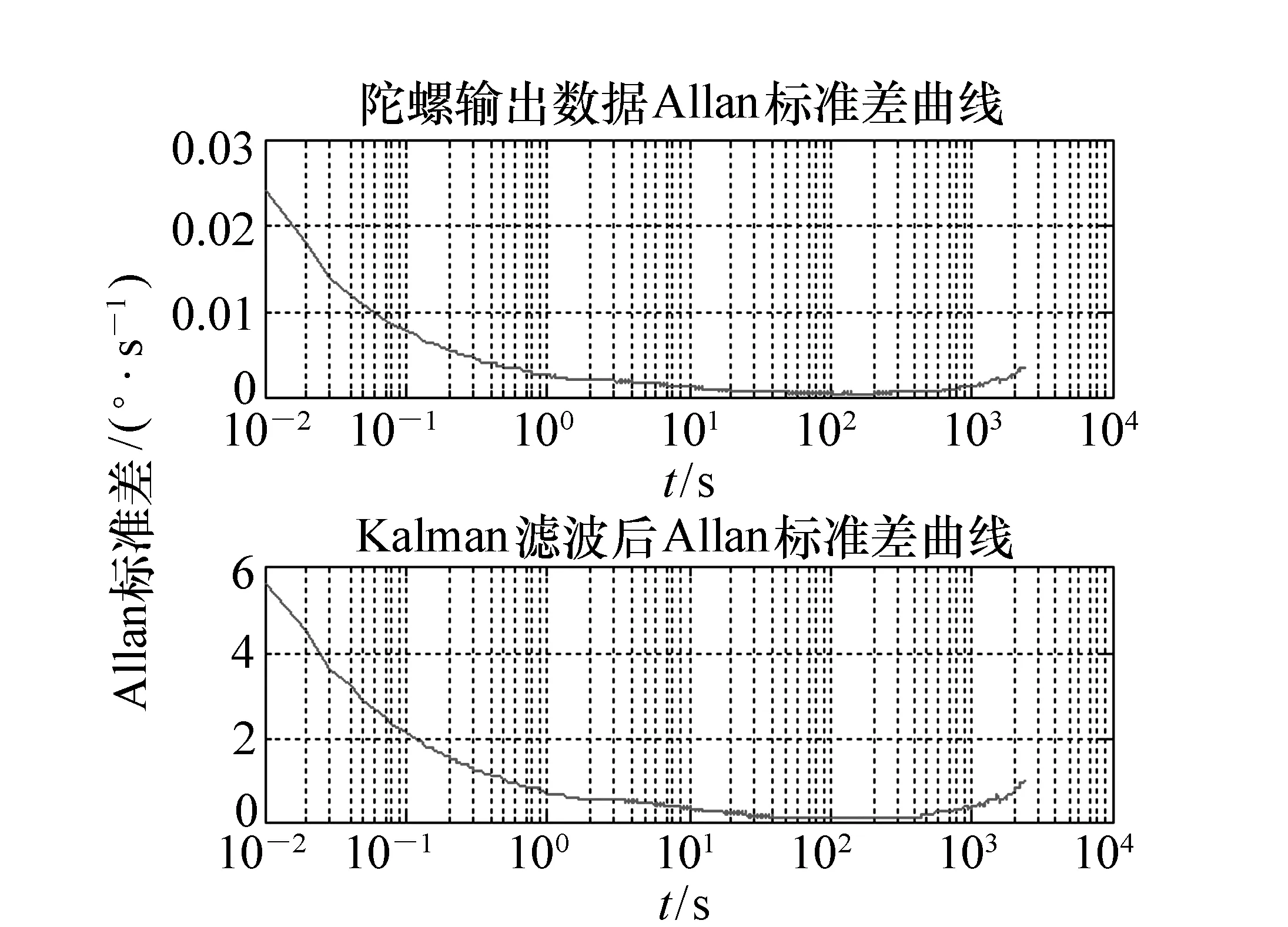
当MEMS陀螺仪输入值为零时,设有N个在初始采样间隔为τ0时获得的陀螺仪输出角速度的初始样本数据;对于共N个初始样本的连续数据,将N个样本数据平均分为K组,把M个连续数据作为一组,一组的时间长度为τ=Mτ0,τ也称为相关时间,分别取τ为τ0、2τ0、……Kτ0(K (1) 则Allan方差为: (2) 式中,〈 〉为求总体的平均。 (3) 分别取不同的τ,重复上述过程。其中,K为N/M商的最大整数值。σ2(τ)为Allan方差,Allan方差的平方根σ(τ)称为Allan标准差,在τ取对数坐标的坐标系中得到σ(τ)~τ曲线,称为Allan标准差曲线。 2.2Allan方差在随机误差辨识中的应用 MEMS陀螺主要包括量化噪声、角随机游走、零偏不稳定性、角速率随机游走和速率斜坡等5种随机噪声。不同噪声在Allan标准差曲线中表现为不同斜率的直线,且各种类型的噪声出现在不同的相关时间区域,可以根据上述特点来辨识陀螺零漂测试数据中存在的不同噪声[13]。陀螺随机噪声辨识的典型Allan方差曲线如图1所示。 图1 陀螺随机误差辨识典型Allan方差曲线 Fig.1 Typical Allan variance curve of Gyro random error identification (1)量化噪声 量化噪声(Quantization Noise,QN)代表了MEMS陀螺的最低分辨率水平,是由MEMS陀螺输出数据的数字化引起的。采样开始时,量化噪声影响较大,在Allan标准差曲线中斜率为-1。量化噪声的Allan方差为: (4) (2)角随机游走 角随机游走(Angular Random Walk,ARW)是MEMS陀螺随机误差的主要部分,它是由相关时间比采样间隔短的多的高频噪声引起的。在Allan标准差曲线中,随着时间推移,量化噪声逐渐减小,角随机游走误差增大,Allan标准差曲线的斜率变为-1/2。之后,会出现一阶马尔可夫噪声和正弦噪声等误差,但其影响比较小,一般选择忽略,此时Allan标准差曲线无规律性。角随机游走的Allan方差为: (5) (3)零偏不稳定性 零偏不稳定性(Bias Instability,BI)来源于电路噪声、环境噪声以及其它有可能产生闪烁噪声的内部构件。随着测量时间的延长,零偏不稳定性误差占据相应时段的主导地位。零偏不稳定性的Allan方差为: (6) 当τ>>τ0时,在Allan标准差曲线中其斜率为0,Allan标准差达到稳定。 (4)角速率随机游走 角速率随机游走(Rate Random Walk,RRW)误差的来源不确定,可能是具有长相关时间的指数相关噪声的极限情况,也有可能是由MEMS陀螺内部晶振的老化效应引起的[14],在Allan标准差曲线中斜率为1/2。角速率随机游走的Allan方差为: (7) (5)速率斜坡 速率斜坡误差(Rate Ramp,RR)可能是由于在某个方向上平台保持一个非常小的加速度,或者由于外界环境的变化导致MEMS陀螺的温度产生漂移,在Allan标准差曲线中斜率为1。速率斜坡的Allan方差为: (8) 若MEMS陀螺各项随机噪声的数理统计特性是相互独立的,则MEMS陀螺零偏稳定性测量数据的Allan方差可表示为各项随机误差的方差之和,如式(9)所示。 (9) 上式可用式(10)进行最小二乘法拟合。 (10) (11) 通过拟合函数求得An的值后,从而可以得到量化噪声Q、角随机游走N、零偏不稳定性B、角速率随机游走K、速率斜坡R的估计值。 B=0.6648·A0°/s, (12) 2.3Allan方差估计精度分析 Allan方差的估计适用于有限长度数据,其估计的可信度与数据划分组数的多少相关,对于某特定的随机过程数据,划分的组数越多,Allan方差估计的可信度就越高。若共有N个数据点,将所有数据点平均分为K组,每组数据点的长度为M,Allan方差估计的百分比误差为: (13) 3测试实验及数据处理 3.1陀螺测试实验设计 陀螺仪测试原理框图如图2所示。 图2 陀螺仪测试原理框图 Fig.2 Principle frame chart of gyro test 本实验测试的MEMS陀螺仪为MSG1100D,MSG1100D的数据以SPI接口输出,陀螺仪测试数据采集板以TMS320F28335为核心接口处理器,使用陀螺仪测试数据采集板采集陀螺仪的输出数据,并将采集到的数据通过CAN总线发送,由CANoe记录CAN总线上的实验数据。温箱速率转台在转台控制程序的控制下实现MEMS陀螺仪的自动化测试。 设定对MSG1100D陀螺输出数据的采样间隔时间为10 ms,以100 Hz的采样频率连续测量80 min。根据陀螺仪测试原理框图所搭建的测试平台如图3所示。 图3 MEMS陀螺仪测试平台 Fig.3 Test platform of MEMS gyro 在室温下,将MSG1100D通过安装夹具固定在转台上,在静态下通电采样,采集持续时间为90 min,选取陀螺仪输出稳定后连续80 min的有效采样数据。MSG1100D陀螺输出原始数据如图4所示。 图4 MSG1100D陀螺输出原始数据 Fig.4 Output raw data of MSG1100D gyro 3.2随机误差的各态遍历性分析 依据一般工程处理,首先假定随机信号是平稳的,再假定它是各态遍历的,通过对随机信号的检验说明假定的正确性。由于过程平稳的假设,保证了不同时刻的统计特性是不同的,只要一个实现时间充分长的过程能表现出各个实现的特征,就可用一个实现来表示总体的统计特性,即平稳的随机过程是各态遍历的。 查符号检验表,在0.05置信度下,若接受平稳性假设,则正负号转换次数应在6~15次之间,而上述正负号的转换次数为8,显然陀螺输出数据是平稳的随机信号,说明陀螺的随机误差是符合各态遍历的。 3.3陀螺输出数据的Allan方差分析 陀螺输出数据的采样间隔τ0=10 ms,连续80 min的有效采样数据共有N=480 000个陀螺输出数据点。已知采样间隔τ0和总采样数据个数N后,应用Allan方差分析法对MEMS陀螺的零偏测量数据进行处理,即基于式(1)~(3)编写Matlab数据程序处理陀螺零偏测数据,可得到σ(τ)~τ对应的Allan标准差曲线。通过最小二乘法对阿伦方差进行拟合,得到拟合系数后绘制出拟合的阿伦标准差曲线。MSG1100D的Allan标准差及其拟合曲线如图5所示。 图5 MSG1100D的Allan标准差及其拟合曲线 Fig.5 MSG1100D′s Allan standard deviation and it′s fitting curve 根据式(12)计算得到MSG1100D陀螺的各项随机误差如表1所示。 表1 MSG1100D陀螺的各项随机误差统计表 根据式(13)计算得Allan方差的估计的百分比误差为0.14%,估计的可信度为99.86%。表明,MSG1100D陀螺测试数据的Allan方差分析具有较高的可信度。 4随机误差补偿方法 4.1陀螺仪输出数据建模方法 MEMS陀螺随机误差测试数据是有序的非平稳随机过程信号,可以按照统计理论,采用一定的方法处理系统的输出数据,建立一个能够反映系统状态的数学模型,可采用自回归模型AR进行建模来描述陀螺的系统特性。AR模型适用于均值为零且满足正态分布的随机过程的描述,该模型的优点是容易建模、计算快速、便于预测、易于估计模型的参数[15]。 {xk}为一零均值的非平稳随机序列,其中K=1,2,…N,该序列的AR模型的形式如式(14)所示。 (14) AR模型阶次的确定主要有自相关和偏相关定阶法、FPE准则、AIC准则等方法。本文采用AIC准则来对AR模型进行定阶。 陀螺漂移模型的阶次一般都比较低,通常不大于三阶。对AR(1)、AR(2)、AR(3)的模型参数和AIC值分别进行估计,计算结果如表2所示。 表2 AR模型拟合系数 从表2可以看出,运用AR模型在不同阶次建模时AIC的值相差不大。在工程应用中一般使用AR(1)即可保证建模的精度。 AR(1)模型的表达式为: (15) 4.2Kalman滤波算法 Kalman滤波技术以陀螺仪的随机漂移等导航系统的误差作为状态变量,用离散化的状态方程来建立描述系统的数学模型,由状态方程和量测方程共同表现系统特性,经过Kalman滤波处理后会得到系统状态变量的最佳估计值[16-17]。在惯性导航系统中,使用Kalman可以将陀螺的随机噪声误差减小到很低的水平。 以系统的观点,可以把陀螺仪的零点漂移看作是输入为白噪声时的系统输出。Kalman滤波采用递推线性最小方差估计的原理,只需给定前一时刻的估计值和当前时刻的测量值即能推出当前状态的最佳估计值,能实现随机信号在最小均方估计误差下的最优线性滤波[18]。 利用Kalman滤波方法对陀螺仪漂移进行滤波的原理如下。 若k时刻的系统方程为: (16) k时刻的量测方程为: (17) Kalman滤波的5个基本方程为: (18) (19) (20) (21) (22) 对于陀螺仪测量数据而言,输入U(k)=0,X(k|k-1)是根据前一状态进行预测后得到的预测值,X(K-1|k-1)为前一状态的最优估计值。P为系统所对应的协方差。H为量测矩阵,对于线性系统来说,H为常数矩阵。Kg(k)为卡尔曼增益。X(k|k)是综合预测值和实际测量值的当前状态的最佳估计值。观测量Z(k)是480 000个采样周期的陀螺仪输出实际测量值。V(k)为测量噪声,一般假设为高斯白噪声,R为测量噪声的协方差。W(k)为过程激励噪声,一般也假设为高斯白噪声,Q为系统过程的协方差。W(k)和V(k)是相互独立的,系统过程协方差Q和测量噪声协方差R为常数。 4.3Kalman滤波器设计及结果分析 由AR(1)模型建立的陀螺随机误差模型为: (23) 观测值Z(K)是陀螺仪输出的实际测量值。陀螺仪输出数据的时间序列是一维的,可以对Kalman滤波公式进行简化。A=0.123 5,B=0,W(k)=ak,X(0|0)=0.05,P(0|0)=0.1,H=1,Q=0.024 7,R=1,得到Kalman滤波公式为: (24) P(k|k-1)=0.12352· (25) (26) (27) (28) 图6 MEMS陀螺随机误差Kalman滤波效果图 Fig.6 Kalman filtering of MEMS Gyro random error 根据Kalman滤波式(24)~(28)设计相应的matlab程序对陀螺仪输出数据进行Kalman滤波处理,处理结果如图6所示。由图6可以看出,Kalman滤波能够很快的收敛和跟踪,滤波前与滤波后数据均值和方差的对比如表3所示。 表3 滤波前后数据均值和方差对比 由表3结果能够看出,Kalman滤波之后数据的均值明显降低;而数据的方差更是大幅下降,减小了3个数量级。 对MEMS陀螺的零偏测量数据经过Kalman滤波处理后得到的数据进行Allan方差分析,得到σKalman(τ)~τ对应的Allan标准差曲线,Kalman滤波前后Allan标准差对比曲线如图7所示。 Kalman滤波后的Allan方差采用最小二乘法进行曲线拟合,得到拟合系数后根据式(12)计算得到Kalman滤波后陀螺的各项随机误差如表4所示。 影响MEMS陀螺精度的主要随机误差为角速率随机游走、零偏不稳定性和速率随机游走。通过Kalman滤波前后的随机误差对比可以看到,陀螺仪的各项随机噪声都有了大幅的降低。 图7 Kalman滤波前后Allan标准差对比曲线 Fig.7 Allan standard deviation contrast curves before and after Kalman filtering 随机误差项滤波后结果随机误差降低百分比/%量化噪声Q/urad4.1×10-688.75角随机游走N/(°/h)0.004197.24零偏不稳定性B/(°/h)0.054297.21速率随机游走K/(°/h32)0.334387.61速率斜坡R/(°/h2)6.156374.53 4.4动态补偿效果分析 为了验证动态下陀螺输出数据的Kalman滤波补偿效果,使安装在转台上的陀螺按照300°/s的角速度进行旋转,得到动态下的陀螺输出数据,重复4.3节处理过程对动态陀螺输出数据进行AR模型建模及Kalman滤波处理,实验及处理结果如图8所示。 图8 动态下MEMS陀螺随机误差Kalman滤波效果图 Fig.8 Kalman filtering effect of MEMS gyro random error under dynamic condition 陀螺动态输出数据同样能够满足AR模型,由图8可以看出,陀螺动态输出数据经过Kalman滤波处理后随机误差显著降低。 5结论 参考文献: [1]查颖,周长省,鞠玉涛.制导火箭弹MEMS陀螺仪信号处理仿真[J].计算机仿真,2013,30(12):70-73. ZHA Y,ZHOU CH SH,JU Y T. Simulation of signal processing for MEMS gyroscope for rockets[J].ComputerSimulation,2013,30(12):70-73.(in Chinese) [2]赵阳,裘安萍,施芹,等.硅微陀螺仪零偏稳定性的优化[J].光学 精密工程,2014,22(9):2381-2386. ZHAO Y,QIU A P,SHI Q,etal.. Optimization of bias stability for silicon microgyroscope[J].Opt.PrecisionEng.,2014,22(9):2381-2386.(in Chinese) [3]贾方秀,裘安萍,施芹,等.硅微振动陀螺仪设计与性能测试[J].光学 精密工程,2013,21(5):1272-1278. JIA F X,QIU A P,SHI Q,etal.. Design and experiment of micro machined vibratory gyroscope[J].Opt.PrecisionEng.,2013,21(5):1272-1278.(in Chinese) [4]沈军,缪玲娟,吴军伟,等.基于RBF神经网络的光纤陀螺启动补偿及应用[J].红外与激光工程,2013,42(1):119-123. SHEN J,MIAO L J,WU J W,etal.. Application and compensation for startup phase of FOG based on RBF neural network[J].InfraredandLaserEngineering,2013,42(1):119-123.(in Chinese) [5]ZOU X F,LU X Y. Estimate method of MEMS gyroscope performance based on allan variance[J].MEMSDevice&Technology,2010,8(47):490-498. [6]赵曦晶,刘光斌,汪立新,等.光纤陀螺温度漂移自适应网络模糊推理补偿[J].红外与激光工程,2014,43(3):791-793. ZHAO X J,LIU G B,WANG L X,etal.. Compensation for FOG temperature drift based on adaptive neurofuzzy inference[J].InfraredandLaserEngineering,2014,43(3):791-793.(in Chinese) [7]黄磊.光纤陀螺随机噪声的建模与滤波[J].弹箭与制导学报,2013,33(6):27-29. HUANG L. Modeling and filtering methods of FOG random noise[J].J.Projectiles,Rockets,MissilesandGuidance,2013,33(6):27-29.(in Chinese) [8]于丽杰,高宗余.MEMS传感器随机误差分析[J].传感器与微系统,2012,31(3):63-65. YU L J,GAO Z Y. Stochastic error analysis on MEMS sensor[J].TransducerandMicrosystemTechnologies,2012,31(3):63-65.(in Chinese) [9]张宇辛,卞鸿巍,朱涛.MEMS陀螺随机误差的实验测试分析[J].舰船电子工程,2013,33(5):140-142. ZHANG Y X,BIAN H W,ZHU T. Testing and analysis for stochastic error of MEMS gyroscopes[J].ShipElectronicEngineering,2013,33(5):140-142.(in Chinese) [10]TANG J H,FU Z X,DENG ZH L. Identification method for RLG random errors based on allan variance and equivalent theorem[J].ChineseJ.Aeronautics,2009,4(22):273-276. [11]耿丹,许光明.小型激光陀螺随机误差的Allan方差分析[J].光学与光电技术,2013,11(1):12-13. GENG D,XU G M. Allan variance analysis of small laser gyro random error[J].Optics&OptoelectronicTechnology,2013,11(1):12-13.(in Chinese) [12]陈晨,赵文宏,徐慧鑫,等.基于卡尔曼滤波的MEMS陀螺仪漂移补偿[J].机电工程,2013,30(3):311-313. CHEN C,ZHAO W H,XU H X,etal.. Compensation of MEMS gyroscope error based on Kalman filter[J].J.Mechanical&ElectricalEngineering,2013,30(3):311-313.( in Chinese) [13]陈旭光,杨平,陈意.MEMS陀螺仪零位误差分析与处理[J].传感技术学报,2012,25(5):628-631. CHEN X G,YANG P,CHEN Y. Analysis and processing on zero position error of MEMS gyroscope[J].ChineseJ.SensorsandActuators,2012,25(5):628-631.( in Chinese) [14]吴峰.两轴平台稳定系统中MEMS陀螺误差建模与分析[D].天津:天津大学,2012:41-56. WU F. Error modeling and analysis of MEMS gyroscope in the two-axis platform stabilization system[D]. Tianjin:Tianjin University,2012:41-56.(in Chinese) [15]DIAO ZH L,QUAN H Y,LAN L D,etal.. Analysis and compensation of MEMS gyroscope drift[C]. 2013 Seventh International Conference on Sensing Technology,IEEE,2013:592-595. [16]LIANG X,CHENG Y J,HONG L CH,etal.. A novel Kalman filter for combining outputs of MEMS gyroscope array[J].Measurement,2012,3(45):745 750. [17]林旻序,汪永阳,戴明,等.线性加速度计在压电陀螺卡尔曼滤波技术中的应用[J].中国光学,2011,4(6):600-604. LIN M X,WANG Y Y,DAI M,etal.. Application of linear accelerometer to Kalman filter for piezoelectric gyro[J].ChineseOptics,2011,4(6):600-604.(in Chinese) [18]DONG H SH,GAMINI D. Convergence and consistency analysis for extended Kalman filter based SLAM[J].Robotics,IEEETransactionson,2007,23(5):1036-1049. 收稿日期:2016-02-29; 修订日期:2016-04-14 基金项目:国家自然科学基金资助项目(No.51305421) 文章编号2095-1531(2016)04-0501-10 中图分类号:V249.322 文献标识码:A doi:10.3788/CO.20160904.0501 作者简介: 张玉莲(1991—),女,山东济宁人,硕士,研究实习员,主要从事惯性导航系统方面的研究。E-mail:yulian-2009@163.com Characterists and compensation method of MEMS gyroscope random error ZHANG Yu-lian*, CHU Hai-Rong, ZHANG Hong-wei, ZHANG Ming-yue, CHEN Yang, LI Yin-hai (ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China)*Correspondingauthor,E-mail:yulian-2009@163.com Abstract:In order to improve the accuracy of MEMS gyro angular velocity, Allan analysis and Kalman filter algorithm are used to analyze and compensate the random error of MEMS gyroscope. First, Allan variance is used to analyze the gyro output data, and least squares algorithm is used to fit Allan variance. A quantitative evaluation of the random noise is obtained. Then, AR model is applied to set up a mathematical model of gyro output data, and AIC criterion is used to determine the order of the AR model, establishing a discrete time expression of gyro drift data. After that, the Kalman filter is designed based on gyro random error model established by AR model, and Kalman filtering algorithm is used for filtering processing of gyro output data. The random error of gyro can be compensated. Finally, the compensation effect of Kalman algorithm for the gyro random error is analyzed through Allan variance. Experimental results indicate that after compensation of Kalman filter the angular random walk is reduced by 97.24% from 0.148 to 0.004 , the bias instability is reduced by 97.21% from 1.940 8°/h to 0.0542°/h, and rate random walk is reduced by 87.61% from to . Kalman filter can be well applied to filtering process of MEMS gyroscope, and it can effectively reduce the gyro random error. Key words:MEMS gyrocope;random error;Allan variance;AR model;Kalman filter Supported by National Natural Science Foundation of China(No.51305421)