
星载离轴多光谱相机焦平面的装调与检测
2016-08-01 09:06苗健宇浦前帅张博研
中国光学 2016年4期
关键词:测量
梅 贵,翟 岩,苗健宇,浦前帅,余 达,张博研
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
星载离轴多光谱相机焦平面的装调与检测
梅贵*,翟岩,苗健宇,浦前帅,余达,张博研
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
摘要:针对某离轴多光谱相机焦平面高精度的装调要求,设计了焦平面组件,阐述了装调、检测的仪器设备和方法。首先将焦平面组件安装至镜头,测量并解算出CCD光敏面的角度和位移偏差,接着根据偏差确定调整垫修研量,进行初次修垫并重新安装,然后利用调整工装微调CCD姿态至满足指标要求,调整垫处打销钉定位,最后根据拟合出的最佳焦平面位置再次修研调整垫,利用销钉复位完成装调工作。检测结果表明,相机的CCD光敏面相对于设计焦平面三维角度偏差分别为Δα=-6.7″,Δβ=1.9′,Δγ=13.2″,三维位移偏差分别为Δx=-0.004 mm,Δy=0.006 mm,Δz=-0.070 mm,相机四谱段、全视场MTF优于0.25,满足设计和装调要求。测量和解算误差分析表明,所用的设备与方法能够满足装调精度的要求,可以为此类相机的研制提供一定的技术参考。
关键词:多光谱相机;焦平面;装调;测量;调制传递函数
1引言
多光谱遥感技术始于20世纪60年代,在工作过程中用几个谱段对同一位置目标进行成像,可以同时获得目标的图像和光谱信息。为实现多光谱成像,常采用多线阵电荷耦合器件(CCD)作为相机的图像传感器[1],波段一般包含有完整的红、绿、蓝三原色谱段,成像数据融合后可以得到彩色图像。由于不同的地物目标具有各自不同的光谱特性,因此多光谱相机可以获取诸如植被、地质、水质等地物属性,配合全色相机(或者谱段)、测绘相机等,在资源考察,农林、水文和地质勘查,环境监测,灾害调查以及测绘制图、军事侦察等方面有着广泛的应用,对于军事和民生都具有重要的意义。国内外的众多卫星上均搭载有多光谱相机,如IKNONS系列、QuickBird系列、GeoEye系列、WorldView系列、Pleiades系列等国外高分辨率商业卫星[2-6],国内如环境减灾-1A及1B、天绘一号、资源一号及三号、高分一号等卫星[7-11]。
离轴三反光学系统具有可以同时实现长焦距与大视场,没有中心遮拦,无色差、对杂散光抑制能力强等诸多优点[12-13],非常适合多光谱成像,但是由于其结构的复杂性和非对称性,实际制造和装调难度较大。
焦平面组件是空间相机的重要组成部分,它与镜头的总成是将CCD的光敏面装调至与光学系统的设计焦平面重合的过程,将这一过程称为焦平面的装调。由于光学系统设计中存在场曲,光机加工、装调均会带来偏差,焦平面实际是一个空间曲面,CCD光敏面不可能与之重合。把镜头在CCD全视场范围内成像质量平均最优的平面称为最佳焦平面,通常是数学方法拟合的平面。因此,一般而言焦平面的装调是将CCD光敏面修调至最佳焦平面位置的过程,其结果直接决定了相机的成像质量能否严格反映光学系统设计、光学加工和镜头的装调水准。针对某三线阵测绘卫星搭载的离轴多光谱相机,阐述了其焦平面的设计、装调与检测方法。由于多光谱相机需要严格匹配测绘正视相机进行摄像,对两者CCD的相对位置和姿态关系提出了很高的要求,因此多光谱相机的焦平面装调精度要求苛刻。本文给出了适应性的装调方法与过程,检测数据和外景成像试验表明,装调结果满足设计要求,相机像质良好。
2焦平面装调参数
2.1光学系统组成

图1 多光谱相机光学系统示意图 Fig.1 Schematic of optical system of a multispectral camera
多光谱相机光学系统为一次成像离轴三反系统,如图1所示。镜头包括主镜、第三镜两个离轴非球面镜和一个球面次镜。这样设计使孔径光阑位于次镜处,光学系统相对比较对称,并且由于是像方准远心光路,光学系统发生离焦时(焦深范围内),各视场的像高将基本保持不变,即每个像元与地面对应的点的物象关系基本保持不变。
2.2CCD结构
多光谱CCD结构如图2所示,具有蓝、绿、红、近红外(分别标记为B、G、R、NIR)4个谱段,每条谱段6 000像元,像元尺寸为13 μm×13 μm。为了便于装调,谱段上下方各有11个三角形标记点,记作M1~M22,沿谱段长度方向7.8 mm间距一个,将谱段10等分,上、下、中间标记点,即M6与M17的顶点连线记为lineH;谱段左右各有一个十字丝标记,两十字丝水平连线记为lineZ。CCD光敏面几何中心定义为:lineH与lineZ的交点,记为O′。
2.3焦平面装调参数
光学系统坐标系O-XYZ如图1所示,+X为卫星飞行方向,+Z为光学系统光轴方向(指向星下点),+Y与+X、+Z构成右手坐标系,坐标原点O为焦平面几何中心;CCD光敏面坐标系为O′-X′Y′Z′,三轴方向定义如图2所示。相机焦平面的装调目的可以直观地认为是将O′-X′Y′Z′与O-XYZ调整至重合。显而易见,CCD光敏面有六维参数需要调整,定义它相对于焦平面沿X、Y、Z轴的旋转角度偏差为Δα、Δβ、Δγ,位置偏差为Δx、Δy、Δz。这六维偏差均会对相机的性能产生影响,因此需要严格控制。

图2 多光谱CCD结构示意图 Fig.2 Schematic of multispectral CCD geometry
3焦平面组件设计
根据CCD的封装结构,多光谱相机焦平面组件设计如图3所示,它主要由导热铜片、CCD、CCD框、连接板、滤光片、滤光片座、标定灯架及CCD驱动电箱(以下简称驱动箱)组成。CCD在工作时会产生热量,组件温度迅速上升,导致焦平面发生热变形,进而影响成像质量。因此在CCD背部陶瓷片上粘接导热铜片并与驱动箱连接以加快散热,同时为了减小热变形,CCD框与滤光片座均采用超低热膨胀系数的殷钢(4J32)材料。考虑到CCD未自带多谱段滤光片,需要自行研制并安装,CCD的4条谱段必须与滤光片的4条通光带严格对准。为了减小CCD相对驱动箱底部安装基准的姿态偏差,需要严格控制单个零件的尺寸和形位公差。
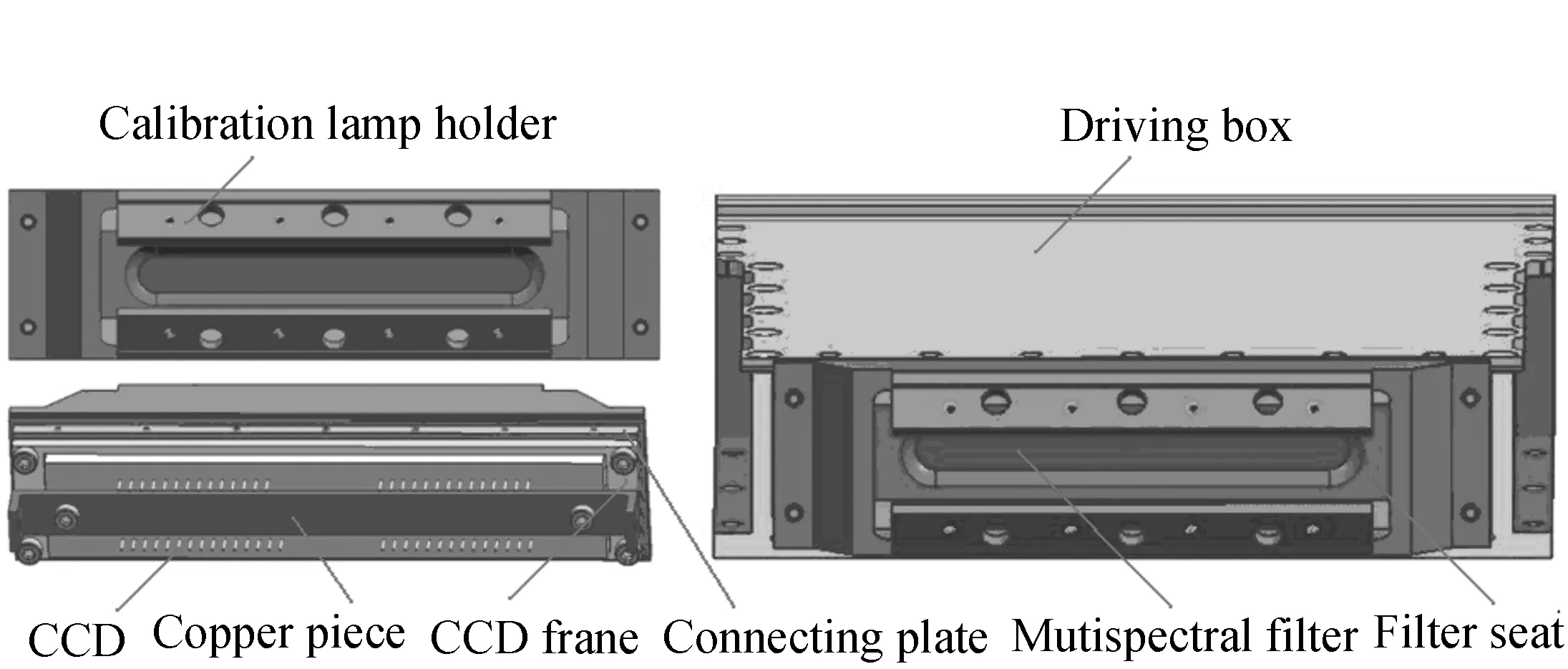
图3 焦平面组件结构简图 Fig.3 Diagram of focal plane subassembly
4焦平面-调焦组件装配

图4 焦平面-调焦组件结构示意图 Fig.4 Schematic of focal plane-focusing subassembly

图5 螺钉连接偏差示意图 Fig.5 Schematic of screw fastening deviation sketch
系统采用焦平面移动调焦方式来补偿系统因热、力学环境导致的离焦,即把焦平面组件安装于调焦机构上。调焦机构为双导轨丝杠螺母式,经过调焦行程、精度测试合格后与驱动箱连接,接口为两侧各3个M4螺钉孔,如图4所示,CCD光敏面将沿导轨方向与调焦机构作同步移动。在使用螺钉连接时,M4螺钉孔对应的光孔直径为Φ4.5 mm,由于光孔直径大于丝孔大径,光孔中心连线与丝孔中心连线可能会出现偏离角,即CCD光敏面Z′轴与调焦机构导轨方向有偏差。如图5所示,将偏离角记为θ,O1、O2为光孔圆心,O3、O4为对应的丝孔圆心,假定孔间距为L,光孔半径为R1,丝孔半径为R2,则有:
O1O2=O3O4=L,
(1)
根据图6中的几何关系可知:
(2)
(3)
(4)
将式(1)~(3)代入式(4)整理可以得到:
(5)
上式中取R1=2.25,R2=2,L=160,可以求得θ最大值为10′45″,因此必须精确测定并消除这一偏差。
5焦平面装调
5.1装调设备与环境
考虑到与测绘相机建立精确的几何关系,焦平面的装调精度要求很高,而装调精度与测量精度密不可分,理论上,测量精度能达到的水平即为装调能达到的极限水平,因而一套高精度的检测和调整设备必不可少。为此研制了0.5″高精度二维转台及其电控系统,750 mm口径、7 500 mm焦距平行光管。使用的设备还包括:高精度四维调整架,微位移调整装置,电子水平仪,0.5″莱卡经纬仪,带有十字丝、光源的自准直目镜,微光摄像机,显示器等,主要设备的布置如图6所示。

图6 焦平面装调装置示意图 Fig.6 Schematic of equipments for focal plane alignment
为了减少外界振动对装调工作的影响,平行光管与二维转台拥有独立的隔振地基,同时考虑到焦平面位置对温度的敏感性,实验室配有恒温控制系统,保证12 h内温度保持在(18±1) ℃范围内。
5.2装调方法与过程
5.2.1装调方法
焦平面的装调实质是最佳焦平面位置的确定(简称定焦)过程,一般在全视场内等间隔取若干个点,确定每个点由初始位置到最佳像质位置对应的调焦量,拟合出最佳焦平面位置,然后根据调焦量确定调整垫的修研量,定焦精度主要取决于调焦量的获取精度和修垫精度。调焦量大小直接决定了修垫量,因此其获取精度对定焦精度的影响很大,通常有两种方法:
(1)利用图6所示装调时的装置,观察选定位置的CCD像元或者标记点,如2.2节所述,以标记点为例,通过调焦,观察标记点清晰度的变化,选择最清晰位置,记录调焦量。这种方法的优点在于方便、快速,可以与装调同时进行;缺点是非常依赖观察者的经验,获取精度难以保证,一般适用于焦平面装调精度要求不高的场合。
(2)在图6中,将目镜、摄像机等设备移除,换成调制传递函数(MTF)检测用黑白条纹目标板和积分球光源,相机接入MTF检测用的软硬件,采集选定CCD像元处的MTF[14],通过调焦可以得到MTF-调焦曲线,取峰值对应的位置计算调焦量。这种方法的优点在于精度较高且稳定,缺点在于无法与调整同时进行;CCD工作时长保护机制的限制致使检测过程耗时较长;调整垫逐步修研过程中由于地检设备的反复接拔线也极为耗时。
5.2.2偏差测定
装调之前,镜头应当经过详细的光学检验,全视场MTF、波相差、焦距等均满足设计要求。将光学系统坐标系O-XYZ引出,安装刻有十字丝的立方镜,建立立方镜坐标系o-xyz,作为焦平面组件装调基准,要求y轴与Y轴,z轴与Z轴安装误差不超过2″。
利用莱卡经纬仪和电子水平仪调整平行光管光轴与二维转台台面水平,镜头安装于四维高精度调整架上,将调整架安装并紧固于二维转台上,此时可对镜头进行六维调整,使镜头入光口全部包含在平行光管口径内,并且镜头立方镜的z轴与光管光轴平行,y轴水平。
上述工作完成后,将焦平面-调焦组件安装于托架上,托架安装于镜头前端面,多光谱整机如图7所示,两步安装均采用调整垫连接,通过这2个竖直垫和2个水平垫的修研来调整CCD的位置与姿态。
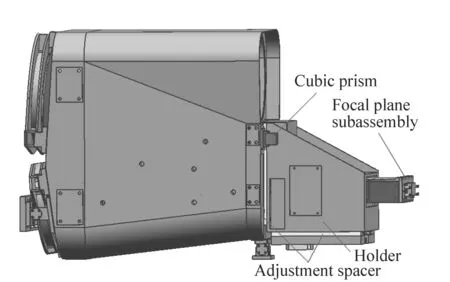
图7 整机结构示意图 Fig.7 Structure schematic of the camera

图8 显示器显示标记点示意图 Fig.8 Schematic of pixel mark in screen

(6)
(7)

(8)
(9)
(10)
式中,B为编码器总码值,Lf为对应的调焦机构总行程,dh为标记点M1与M11顶点的水平距离,dv为上下标记点底边的垂直距离,f′为相机焦距,β为相机设计离轴角。
5.2.3修研与微调
根据式(10)的计算结果可以确定调整垫的初修量。修垫时,每一组按照相机上的安装方式和间距固定于高精度工装板上,利用加工中心同时去量,以保证修量的精确度。由于加工中心去量精度有限,通常还需要对调整垫进行研磨。修研完毕,重新将焦平面-调焦组件安装于镜头上,重复之前的测量、计算工作,偏差要求严格的Δα与Δy如第4节中的分析,很可能不满足要求,需要设计一个微位移工装来调整,如图9所示,工装固定于托架上,调焦机构底板处设置四组M5×0.5细牙螺杆与螺母,螺杆旋转至与底板接触,将底板与托架连接螺钉略微拧松使焦平面-调焦组件刚好可以左右窜动,按照不同的组合旋开和旋紧螺杆即可实现Δα和Δy的调整。在这两维偏差各自调整时会相互影响,因此可以先将Δy调整到位,然后在调整Δα的同时微调Δy的耦合偏移量。当相机立方镜z轴与光管光轴方位一致时,标记点M6顶点位于十字丝竖线上,观察标记点M1和M11,同时最清晰,此时Δα和Δy调整完毕,如此M1、M11、M17构成的焦平面位置一般可以满足装调要求但未达到最佳。由于焦平面场曲的存在,M1与M11同时清晰时,M2~M10并不一定同样清晰,按照5.2.1节所述取5个点拟合出最佳直线。焦平面X向视场很小,场曲的影响可以忽略,Δβ修正后,经过上述最佳直线与光轴垂直的面即可确定为最佳焦平面,根据此最佳焦平面位置,竖直调整垫还需要进一步修研,为了保证之前的装调状态不变,每个调整垫处打2个销钉定位,拆下竖直调整垫,修研后利用销钉复位,至此焦平面装调完毕。

图9 焦平面微调工装 Fig.9 Schematic of fine-tuning mechanism of the focal plane
5.3检测结果
按照5.2节的装调方法,完成了焦平面的装调,经过实测并按式(6)计算,得到装调偏差如表1所示,可以看出均满足设计指标。
随着油田企业业务的开展,档案资料的内容也逐渐增加,给档案管理工作带来了更高的难度。此外,对于油田企业的档案来说,不仅仅需要做好保存工作,而且要挖掘档案的潜在价值,为当前工作更高质量、更高效率地开展提供必要的借鉴。而这些工作的开展,都离不开一套完善的档案信息化管理制度。由于油田企业对于档案管理工作重视不足,配套的信息化管理制度也没有建立起来。有些企业即便是有档案信息化数据运行管理制度,在实际工作中没有严格执行,管理制度形同虚设,档案管理人员工作中存在较大的随意性。

表1 焦平面装调偏差实测结果
检测绿谱段0视场和±1视场以及蓝谱段和近红外谱段0视场的MTF,画出相应的MTF-调焦曲线,如图10(a)、(b)所示,可以看出CCD左右两端和上下两谱段的MTF峰值对应的调焦位置非常接近,即CCD光敏面与最佳焦平面位置很吻合。相机最佳焦平面处四谱段各5个视场MTF(奈奎斯特频率38.5 lp/mm处)如表2所示,全视场MTF均满足设计要求,将镜头的MTF与之作对比,如图11所示,可以看出,相机与镜头的MTF在全视场范围内趋势较为一致,装调效果较好。

图10 MTF-调焦曲线 Fig.10 Curve of MTF-focusing
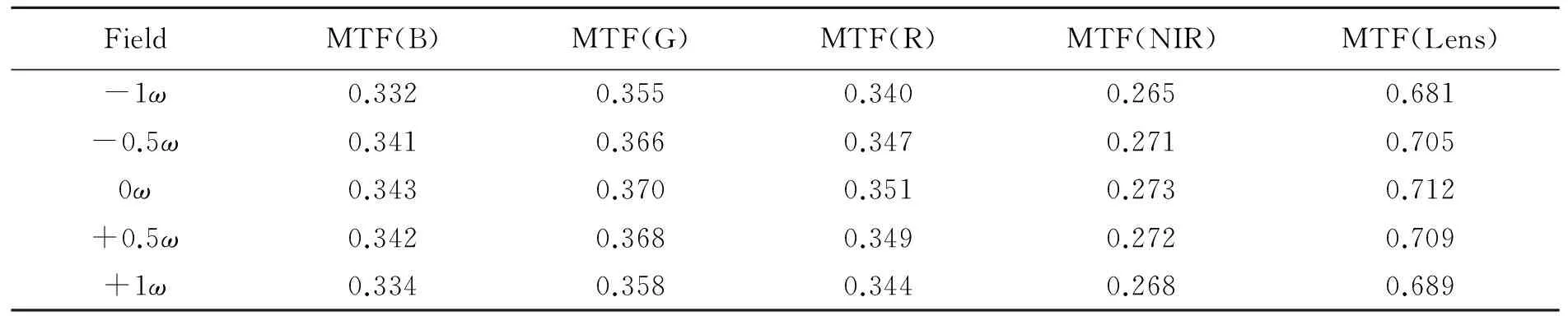
FieldMTF(B)MTF(G)MTF(R)MTF(NIR)MTF(Lens)-1ω0.3320.3550.3400.2650.681-0.5ω0.3410.3660.3470.2710.7050ω0.3430.3700.3510.2730.712+0.5ω0.3420.3680.3490.2720.709+1ω0.3340.3580.3440.2680.689

图11 全视场MTF对比图 Fig.11 Comparison curve of all-field MTFs
5.4装调误差分析
焦平面装调的误差主要来源于使用的仪器设备的调整、测量误差及方法误差[15-16],如表3所示。

表3 焦平面装调中的各种误差
由表3中各误差项可以得到角度测量综合误差为:
(11)
位移测量综合误差(码值转化为距离)为:
(12)
则由多元函数y=f(x1,x2,…,xn)的误差与各测量值x1,x2,…,xn误差之间的关系式[17]
(13)
可以得到式(10)中六维偏差的检定误差为:
(14)
(15)
(16)
(17)
(18)
(19)
带入数据求得σΔα=8.1″,σΔβ=1.6′,σΔγ=2.5″,σΔx=5.6 μm,σΔy=5.6 μm,σΔz=1.6 μm,可以满足表1中的装调要求。
5.5外景成像试验
为了初步验证成像质量,需要对装调完毕的多光谱相机进行外景成像试验。由于在实验室进行焦平面装调时,是按无穷远物距确定的焦面位置,在有限距离成像时,将产生离焦,影响像质。相机对成像区域的距离是l,则相应产生的离焦量Δl′根据应用光学公式计算得到:
(20)
为了消除这一影响,可根据准确测得的目标距离,在无穷远物距基础上调焦Δl′,保证室外成像时,像面准确,成像清晰。

图12 多光谱相机外景成像试验图 Fig.12 Outdoor imaging test of the camera
按照上述方法对相机进行了调焦,图12为同一时刻四谱段对同一目标区域进行推扫成像获取的原始灰度图像(限于文档大小,作者进行了格式处理),图像宽度方向对应CCD线阵方向,长度方向对应推扫方向,可以看出四个谱段获取的影像在整个视场内层次分明,细节清楚;根据全视场影像获取的景物,实测相机视场角的大小,与装调所测数据较为吻合。因此可以初步判断相机的焦平面位置装调较为准确。该相机目前已经有两台在轨正常运行,获取了大量优质的多光谱影像,用户给予了很好的评价,验证了本文所述装调方法的可行性。
6结论
焦平面的装调是遥感相机研制过程中的重要环节,本文针对某测绘卫星搭载的多光谱相机焦平面装调精度要求高的问题,设计了其焦平面组件,阐述了装调、检测的仪器设备和方法,确定了相机的最佳焦平面位置。装调完成后的检测结果表明,相机的CCD光敏面相对于设计焦平面三维角度偏差分别为Δα=-6.7″,Δβ=1.9′,Δγ=13.2″,三维位移偏差分别为Δx=-0.004 mm,Δy=0.006 mm,Δz=-0.070 mm,相机四谱段、全视场MTF均优于0.25,满足设计和装调要求,测量和解算误差分析表明,所用的设备与方法可以满足装调精度要求,相机外景成像像质良好。
参考文献:
[1]武星星,刘金国.大视场多光谱空间相机在轨自动相对辐射校正研究[J].仪器仪表学报,2013,34(1):104-111.
WU X X,LIU J G. Research on on-orbit automatic relative radiometric correction of multi-spectral space camera with large field of view[J].ChineseJ.ScientificInstrument,2013,34(1):104-111.(in Chinese)
[2]JOHN W F. The QuickBird telescope:the reality of large, high-quality, commercial space optics[J].SPIE,1999,3779:22-30.
[3]BICKNELL W E,DIGENIS C J,FORMAN S E. EO-1 advanced land imager[J].SPIE,1999,3750:80-88.
[4]SHIMODA H. Japanese earth observation programs[J].SPIE,1999,3870:37-48.
[5]曲宏松,金光,张叶.“NextView 计划”与光学遥感卫星的发展趋势[J].中国光学与应用光学,2009,2(6):27-36.
QU H S,JIN G,ZHANG Y. NextView program and progress in optical remote sensing satellites[J].ChineseJ.OpticsandAppliedOptics,2009,2(6):27-36.(in Chinese)
[6]徐伟,朴永杰.从Pleiades剖析新一代高性能小卫星技术发展[J].中国光学,2013,6(1):9-19.
XU W,PIAO Y J. Analysis of new generation high-performance small satellite technology based on the Pleiades[J].ChineseOptics,2013,6(1):9-19.(in Chinese)
[7]焦斌亮,王朝晖,林可祥,等.星载多光谱CCD相机研究[J].仪器仪表学报,2004,25(2):146-151.
JIAO B L,WANG Z H,LIN K X,etal.. A multispectral CCD camera for satellite use[J].ChineseJ.ScientificInstrument,2004,25(2):146-151.(in Chinese)
[8]刘姜伟,黄海乐,李五.天绘一号卫星高分辨、多光谱相机与三线阵正视相机夹角在轨标定方法研究[J].红外与激光工程,2015,44(2):662-667.
LIU J W,HUANG H L,LI W. Research on method for the in-flight calibration of mapping satellite-1 high-resolution camera, multispectral camera and three-line-array nadir camera′s intersection angle[J].InfraredandLaserEngineering,2015,44(2):662-667.(in Chinese)
[9]蒋永华,张过,唐新民,等.资源三号测绘卫星多光谱影像高精度谱段配准[J].测绘学报,2013,12(6):884-890.
JIANG Y H,ZHANG G,TANG X M,etal.. Research on high accuracy band-to-band registration method of ZY-3 multispectral image[J].ActaGeodaeticaetCartographicaSinica,2013,12(6):884-890.(in Chinese)
[10]贾福娟,吴雁林,黄颖,等.环境减灾_1A_1B卫星宽覆盖多光谱CCD相机技术[J].航天器工程,2009,18(6):37-42.
JIA F J,WU Y L,HUANG Y,etal.. Design and on-orbit application of CCD camera on HJ-1A/1B satellites[J].SpacecraftEngineering,2009,18(6): 37-42.(in Chinese)
[11]范斌,蔡伟军,张孝弘,等.资源三号卫星多光谱相机技术[J].航天返回与遥感,2012,33(3):75-84.
FAN B,CAI W J,ZHANG X H,etal.. Technology of the multi-spectral camera of ZY-3 satellite[J].SpacecraftRecovery&RemoteSensing,2012,33(3):75-84.(in Chinese)
[12]巩盾.空间遥感测绘光学系统研究综述[J].中国光学,2015,8(5):714-724.
GONG D. Review on mapping space remote sensor optical system[J].ChineseOptics,2015,8(5):714-724.(in Chinese)
[13]沙巍,陈长征,许艳军,等.离轴三反空间相机主三镜共基准一体化结构[J].光学 精密工程,2015:23(6):1612-1619.
SHA W,CHEN CH ZH,XU Y J,etal.. Integrated primary and tertiary mirror components from common base line of off-axis TMA space camera[J].Opt.PrecisionEng.,2015: 23(6):1612-1619.(in Chinese)
[14]孙继明,郭疆,邵明东,等.大视场时间延迟积分CCD遥感相机的精密定焦[J].光学 精密工程,2014,22(3):602-607.
SUN J M,GUO J,SHAO M D,etal.. Precise focusing for TDICCD camera with wide field of view[J].Opt.PrecisionEng.,2014,22(3):602-607.(in Chinese)
[15]吴国栋.一种三线阵测绘相机CCD像面的装调方法[J].仪器仪表学报,2009,30(11):2395-2398.
WU G D. Alignment method of CCD image plane for three-line array mapping camera[J].ChineseJ.ScientificInstrument,2009,30(11):2395-2398.(in Chinese)
[16]许志涛,刘金国,龙科慧,等.高分辨率空间相机调焦机构精度分析[J].光学学报,2013,33(7):0728001.
XU ZH T,LIU J G,LONG K H,etal.. Accuracy analysis of focusing mechanism of high resolution space camera[J].ActaOpticaSinica,2013,33(7):0728001.(in Chinese)
[17]马宏,王金波.误差理论与仪器精度[M].北京:兵器工业出版社,2007:84-87.
MA H,WANG J B.ErrorTheoryandPrecisionofInstrument[M]. Beijing:Weapon Industry Press,2007:84-87.(in Chinese)
收稿日期:2016-03-16;
修订日期:2016-04-28
基金项目:国家自然科学基金资助项目(No.61405191);吉林省科技发展计划青年科研基金资助项目(No.20150520102JH)
文章编号2095-1531(2016)04-0491-10
中图分类号:V447+.1; V443+.5
文献标识码:A
doi:10.3788/CO.20160904.0491
作者简介:

梅 贵(1984—),男,江苏高邮人,助理研究员,2006年、2009年于清华大学分别获得学士、硕士学位,主要从事空间遥感器光机结构设计方面的研究。E-mail:meigui840428@163.com
Focal plane alignment and testing for an off-axis multispectral space borne camera
MEI Gui*, ZHAI Yan, MIAO Jian-yu, PU Qian-shuai, YU Da, ZHANG Bo-yan
(ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China)*Correspondingauthor,E-mail:meigui840428@163.com
Abstract:To meet the requirements of high alignment accuracy for a multispectral camera, a focal plane subassembly is designed. Meanwhile, the instruments, fixtures and methods for alignment and measurement are described. First of all, the focal plane subassembly is mounted to the optics so that deflections and shifts of the CCD photosensitive area related to the image plane could be measured and calculated. According to the results given previously, the removal dimension of adjustment spacers is determined and preliminary modification is applied to the spacers. Thereafter, the focal plane subassembly is remounted. Then, the CCD is fine adjusted to its correct orientation and location, and locating pins are embedded into the spacers to hold this adjustment. Finally, based on the fitted optimum focal plane position, spacers are carefully ground and restored. Thus, the alignment is completed. Test results show that, three-dimensional deflections are Δα=-6.7″, Δβ=1.9′ and Δγ=13.2″ respectively; three-dimensional shifts are Δx=-0.004 mm, Δy=0.006 mm and Δz=-0.070 mm respectively. The Modulation Transfer Functions(MTF) corresponding to four spectra and whole field of view are more than 0.25, which can meet the design and alignment specifications. The measurement and calculation error analysis shows that the equipments and methods can meet the precision requirements and provide technique references for homologous cameras.
Key words:multispectral camera;focal plane;alignment;measurement;Modulation Transfer Function(MTF)
Supported by National Science Foundation of China(No.61405191), Jilin Provincial Project of Science & Technology Development of China(No.20150520102JH)
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
小学科学(学生版)(2021年5期)2021-07-22
科学大众(2021年9期)2021-07-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
故事作文·低年级(2017年7期)2017-07-20
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
少儿科学周刊·儿童版(2016年1期)2016-03-14
