
高动态环境下GPS/INS超紧组合导航研究
2016-07-21 04:54黄清华
航天控制 2016年4期
关键词:鉴相器
徐 韩 曾 超 黄清华
1. 南京理工大学, 南京 210094 2. 中国工程物理研究院电子信息研究所,绵阳 621999
高动态环境下GPS/INS超紧组合导航研究
徐 韩1,2曾 超2黄清华2
1. 南京理工大学, 南京 210094 2. 中国工程物理研究院电子信息研究所,绵阳 621999

随着信息技术的发展,组合导航越来越受重视。随着研究的不断深入以及工程需求的提出,对组合导航的综合性能要求也越来越高。高动态将导致信号跟踪性能下降,进而导致导航精度降低,甚至卫星失锁。松、紧组合在高动态中会出现误差累计和循环滑动,本文介绍了超紧组合,并结合其特点给出模型,针对高动态引起的问题提出相应的超紧组合模型。仿真结果显示,与传统的组合导航比较,在高动态环境中超紧组合能在较少的解算时间内精确导航。 关键词 超紧组合;鉴相器;预滤波器;ERC;UKF;交互多模型(IMM)
在高动态的环境下经常出现信号跟踪异常问题,采用超紧组合的方法能减少复杂信号模型和高更新率导致的繁重计算量,通过INS和GPS的相互辅助提高导航精度。Petovello[1]等人做了GPS超紧组合在弱信号环境下的性能分析。Soloviev[2]等研究室内的GPS/INS的超紧组合导航和GPS超紧组合在多径干扰的环境下的性能分析。Kiesel[3]等展示GPS超紧组合在城市环境下的初级方针环境结果。C.O’Driscoll[4]等人提出GPS/INS的超紧组合导航相干积分。
超紧组合能提供精确的导航输出和更强的抗干扰能力。本文介绍了多种超紧组合系统,有Horslund 和Hooker[5]的运用码环鉴别器和载波鉴别器输入集成滤波器的超紧组合系统;Abbott和Lillo[6]运用预滤波器的超紧组合,预滤波器就是从相关器的输出中估计出码环相位误差和载波频率误差;Gustafson的运用扩展范围相关器(ERC)的超紧组合系统。
1 GPS/INS超紧组合
超紧组合包括码和载波跟踪环路,就性能而言,超紧组合能给接收机以及整个系统提供更精确的定位和更好的鲁棒性。超紧组合不仅能改善获取时间,同时还能改善锁相环的带宽和拒绝噪音的跟踪性能,能得到更加精确的多普勒和相位测量。超紧组合中惯性传感器通过消除运动平台的跟踪需求以减少载波相位跟踪环路的带宽。这种集成结构可以得到干扰较少的载波相位测量,更快的跟踪载波相位。此外,假如信息通道有一定的视线阻塞,GPS接收机的钟漂估计仍能接收到这个通道的连续跟踪信号,能有效的阻止载波相位的循环滑动,因此超紧组合在高性能的导航系统中具有潜在的应用,能提供精确的导航输出和更强的抗干扰能力。
正交信号来自接收机相关器,同相(I)和正交(Q)组成了滤波器的量测值。GPS的信号由下式表示:
y(t)=A·CA(t)·D(t)
cos(2πf0(t-τ)+θ0)+η
(1)
其中,A为信号幅度;CA为C/A码序列;D(t)为导航数据;τ为卫星和接收机之间的传播延迟;f0为载波频率;θ0为最初载波相位;η为高斯噪声。信号来自接收机相关器。滤波器的量测值I和Q表示如下:
(2)
(3)
简化后的方程表示如下:
sin(ωekT+θe)}+ηI
(4)
sin(ωekT+θe)}+ηQ
(5)

sin(ωekT+θe)}
(6)
sin(ωekT+θe)}
(7)
上式给出了I和Q的期望信息,E[I]和E[Q]的信息依赖于载波频率和相位误差。误差可以通过位置和速率来描述。
(8)
(9)

(10)
(11)

2 GPS/INS跟踪误差
集成卡尔曼滤波器的量测值是GPS接收机的相关器的输出,集成卡尔曼滤波器的更新率和相关器输出率一样。当这种结构没有用于超紧组合系统时,复杂的信号模型和高更新率所导致的繁重的计算量将完全由集成卡尔曼滤波器承担。
为避免这种情况,加入了信号跟踪误差估计模型。为满足加入信号跟踪误差估计模型,将集成卡尔曼滤波器分成:信号跟踪误差估计模型和一个新的集成导航卡尔曼滤波器。当这个新的模块估计出距离误差和距离变化率误差时,GPS/INS紧组合导航系统的集成卡尔曼滤波器也不需要做更多的改动,有很多方法可以解决上述问题,作为信号误差跟踪估计模型有:鉴相器[7]、预滤波器[8]和扩展范围相关器(ERC)[9]等,下文将逐个介绍并进行分析。
2.1 相位鉴别器
上述模型在超紧组合中有多种形式,最典型的信号跟踪误差估计器形式有3种:鉴相器,预滤波器和扩展范围相关器。
基于鉴相器的GPS/INS超紧组合如图1所示,线性鉴相器接收估计码相位误差,反正切鉴相器是估计载波相位和频率误差。

图1 基于鉴相器的GPS/INS超紧组合导航
加入鉴相器后原本过于复杂的信号模型和高更新率所导致的繁重的计算量将分别由集成卡尔曼滤波器和相位鉴别器承担。
2.2 预滤波器
图2为基于预滤波器的GPS/INS超紧组合,预滤波器是接收相位误差和频率误差,每一个预滤波器都表现为扩展卡尔曼滤波器的形式,处理6个I-Q量测值。

图2 基于预滤波器GPS/INS超紧组合
2.3ERC
基于ERC的GPS/INS超紧组合如图3所示,用扩展范围相关器(ERC)估计相位误差和频率误差。
在超紧组合中加入这3种信号跟踪误差估计模型可以有效减少原本过于复杂的信号模型和高更新率所导致的繁重的计算量。
3 NCO命令产生法
在GPS/INS的超紧组合中,作为一个预先方法,在SDINS和卡尔曼滤波器输出代替GPS接受机跟踪环路输出的过程中,产生NCO命令。本节将介绍基于NCO命令产生的GPS/INS超紧组合[10-11]。
在独立的GPS接收机中,NCO命令接收来自环路滤波器。在GPS/INS超紧组合中,GPS接收机的NCO命令来自于SDINS输出补偿和通过星历参数所得出的卫星位置和速率。GPS/INS超紧组合的NCO命令产生机制如图4所示。
码NCO命令产生方程如下:
MCO=MO,CO+ΔMCO
(12)
(13)
(14)
其中,MCO,MO,CO,ΔMCO,NCO,fS,fD,fCO和fCA分别表示码NCO命令、表面码NCO命令、由多普勒频率产生的码NCO命令、码NCO累加器比特量、参考时钟频率的NCO、多普勒频率、码频率和载波频率。载波NCO命令产生方程如下:
MCA=MO,CA+ΔMCA
(15)
(16)
(17)
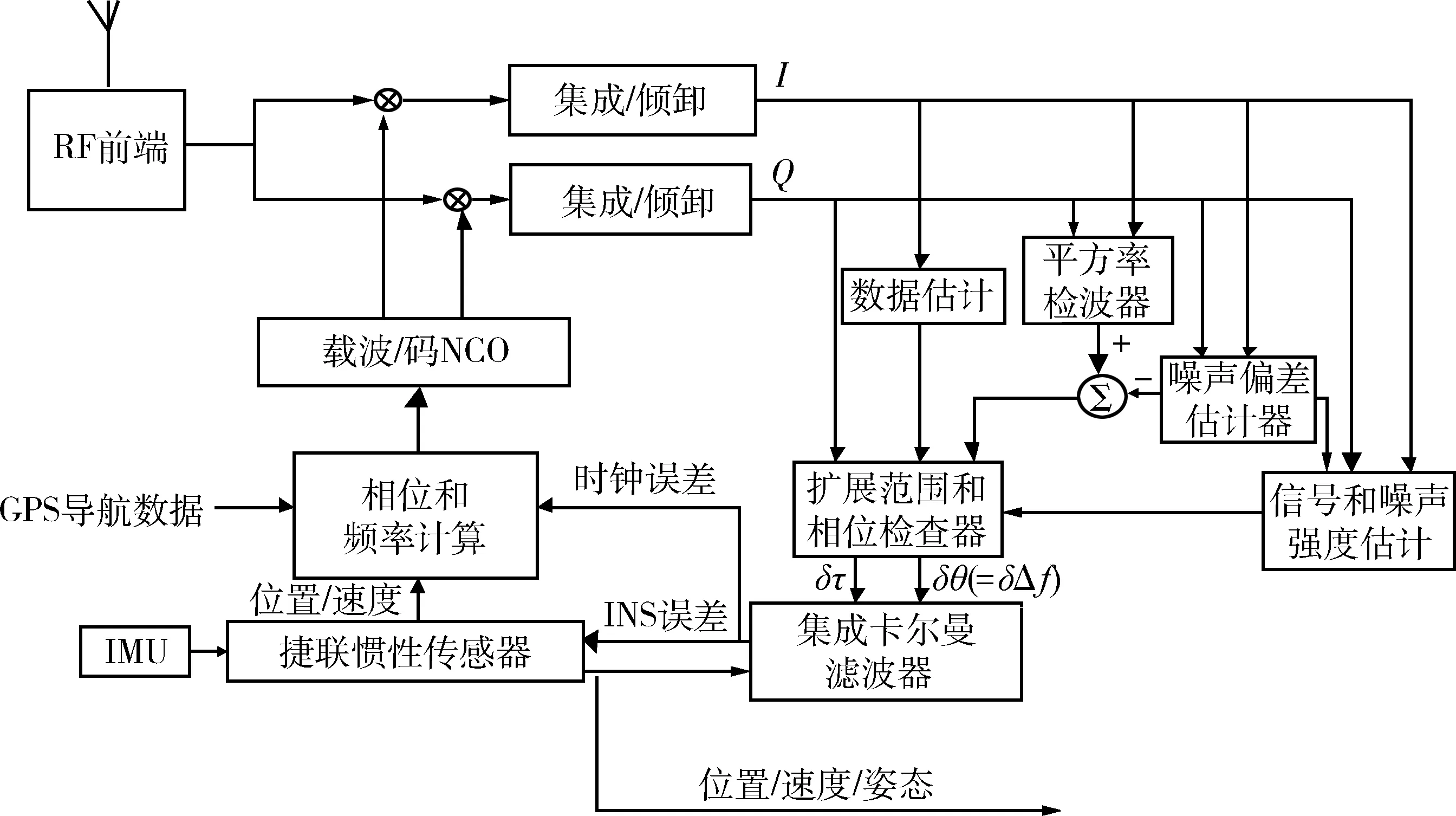
图3 基于ERC的GPS/INS超紧组合导航

图4 GPS/INS超紧组合NCO命令

以上可以看出NCO命令由表面NCO命令和修正项组成。通过码和载波频率误差计算得出误差修正。码和载波频率误差由SDINS输出补偿和通过星历参数所得出的卫星位置和速率计算得出。
从式(12)~(17)可以看出NCO命令更新率和SDINS输出率相同。一般来说,NCO命令的更新率会高于SDINS输出率,表明GPS/INS超紧组合在高动态环境下信号跟踪性能会恶化,所以能推出下一代的NCO命令控制需要有低更新率。
4 UKF
首先搭建一个非线性动态模型,这个在第1节已进行了相关描述,导航参数将组成UKF的状态矢量,因此,需要理解I/Q量测值和INS状态之间的关系。UKF这种滤波器是一种高级的EKF,其实UKF的目的就是解决非线性方程,同时在线性模型无法反映真实动态情况时也可以用UKF。
用多个已知模型的卡尔曼滤波组合进行混合预测,例如交互式多模型方法(IMM),该方法的思想是用多个运动模型混合滤波,每个模型都有一个单独的滤波器。IMM方法采用一个马尔科夫链控制多个模型之间的切换,把各个模型上一时刻的滤波值进行交互作为各模型下一时刻的输入,然后分别进行滤波,得到的结果进行加权交互输出作为最终结果。这是一种自适应方法,利用多个滤波器的加权值进行自适应调整,避免了目标运动时的滤波发散,效果较好。图5为交互多模型-UKF(IMMUKF)算法图。
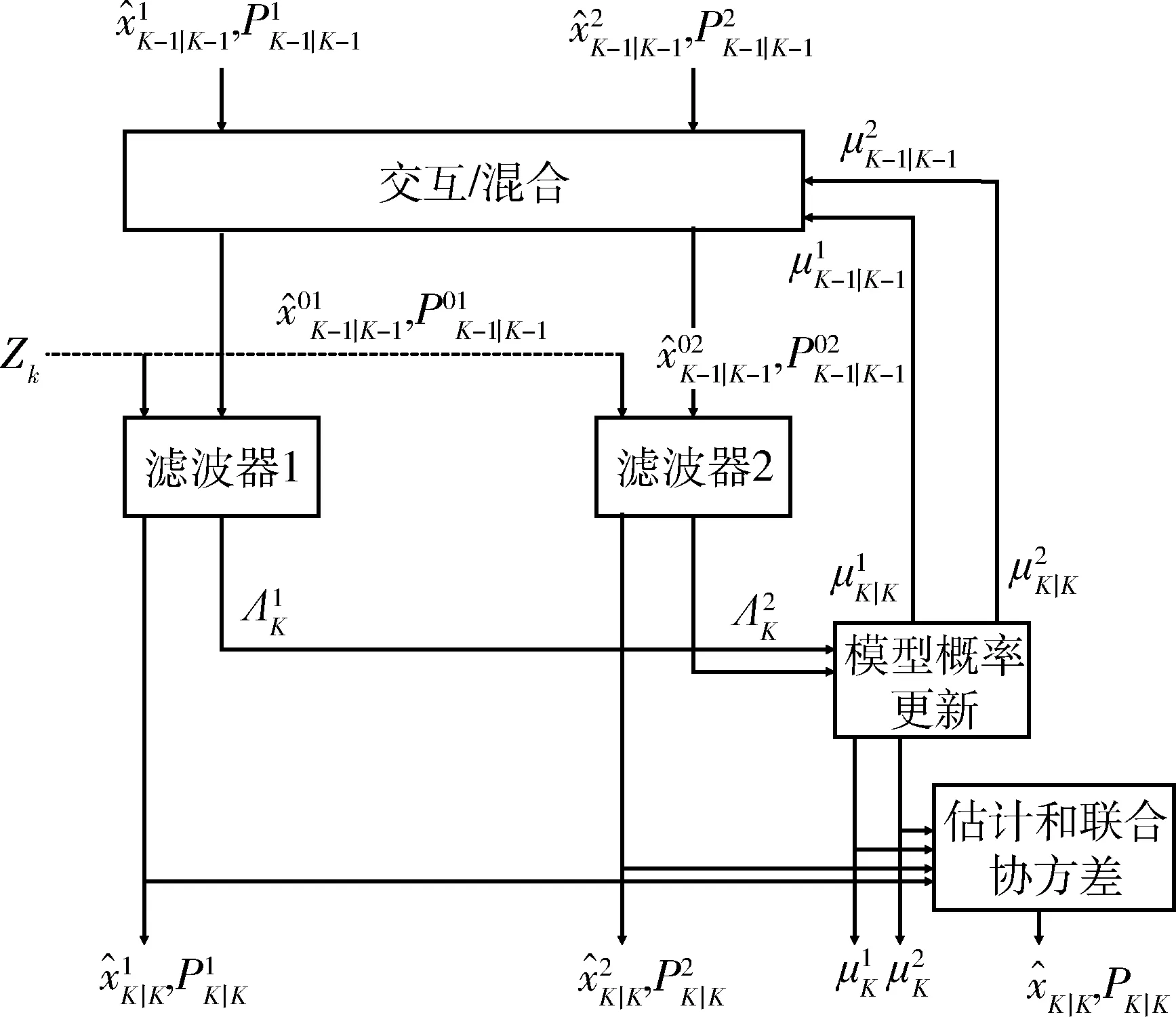
图5 IMMUKF超紧组合模型
IMMUKF方法能保证高动态环境导航精度,同时低动态环境导航精度不会降低。相对于EKF,UKF,基于IMM的方式能提高估计精度。基于IMMUKF的滤波算法在超紧组合中有相当强的发展潜力。
5 仿真验校
通过对比合作跟踪模式的超紧组合和传统组合导航跟踪模式,在相同的接入信号强度下对不同的导航方式进行验证,图6为接入信号的信号强度,加加速度为10g/s,仿真时间为50s,信号强度维持在40~45dB-Hz。
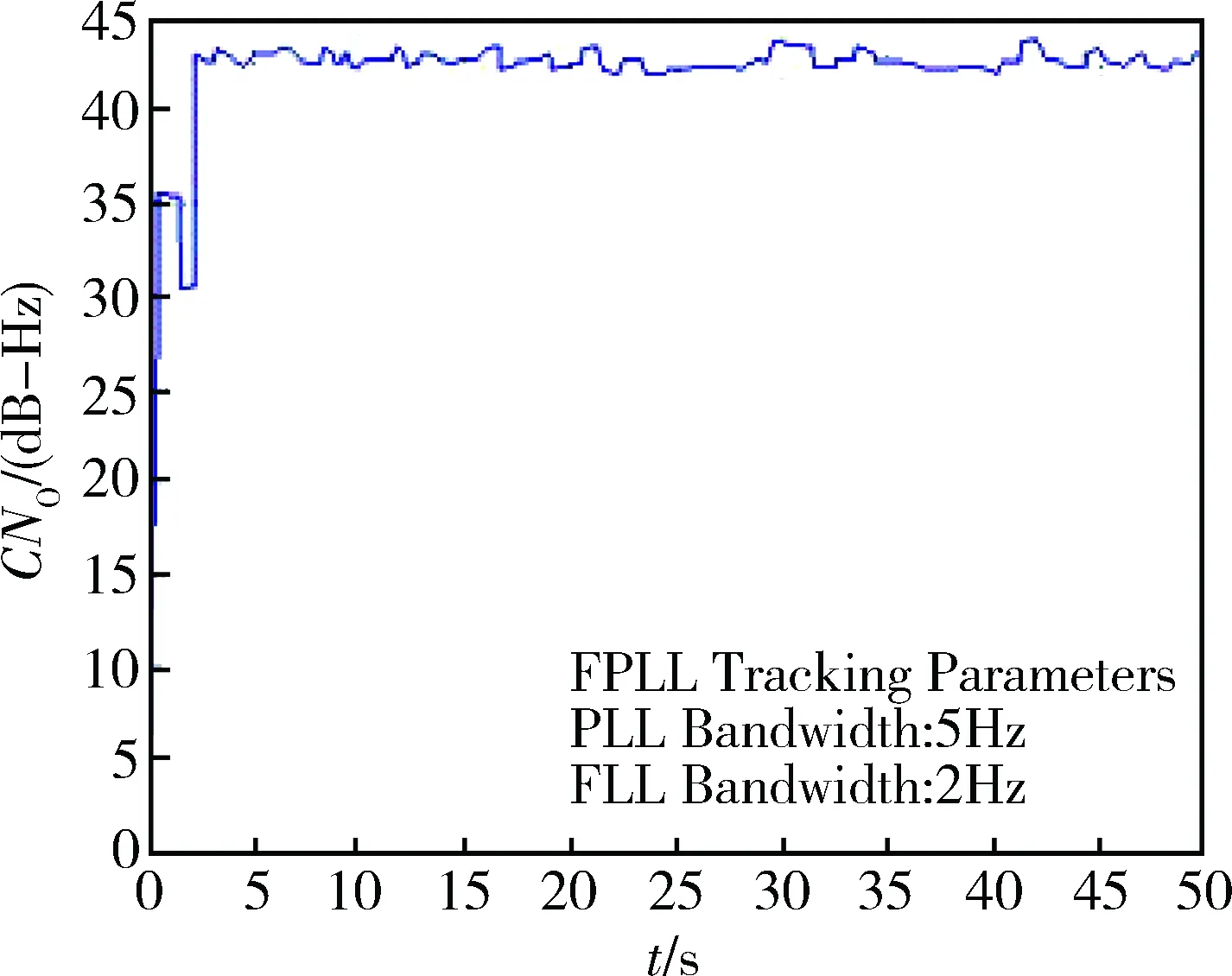
图6 接入信号

图7 不同组合导航模式的速度误差对比
图7(a)为采用合作跟踪模型的超紧组合仿真结果,从图中可知在仿真开始14s时跟踪环路跟踪到信号,并且北向和东向速度误差为0.038m/s。图7(b)为传统组合导航仿真结果,从图中可知在仿真开始20s时跟踪环路跟踪到信号,北向和东向速度误差为0.094m/s。

表1 两种导航模型50次仿真结果
表1为合作跟踪模式超紧组合和传统组合导航跟踪模式50次仿真的平均速度误差、收敛次数和跟踪时间。从表1可知,通过50次仿真后,超紧组合导航和传统组合导航较平均速度误差减小66%,收敛能力提高12%,跟踪时间缩短30%。
6 总结
为了解决高动态环境下的多普勒效应和信号跟踪性能下降的问题,提高组合导航在高动态环境下的抗干扰能力和多径衰减的性能,介绍了超紧组合以及多种应用在超紧组合上的方法。通过仿真验证了超紧组合和传统组合导航在相同接入信号下的速度误差,收敛能力和跟踪时间等数据,可知基于超紧组合的导航模型优于传统组合导航。
[1] Petoveuo M G, et al. Performance Analysis of an Ultra-Tightly Integratde GPS and Reduced IMU System[C]. Proceedings of ION GNSS 2007. Fort Worth, 2007: 802-815.
[2] Soloviev A, et al. Utilizing Multi-path Reflections in Deeply Integrated OPSIINS Architecture for Navigation in Urban Environments[C]. Proceedings of PLANS 2008, Monterey, CA. 2008: 529-541.
[3] Kiesel S, et al. Preliminary Simulation Results of a Deeply Coupled GPS/INS System for High Dynamics[C]. Proceedings of IONGNSS 2008, Savannah, Georgia, 2008: 88-92.
[4] Jeong W K,Hwang D H,Sang J L.Performance Evaluation of INS Velocity-Aided Tracking Loop and Deeply Coupled GPS/INS Integration System in Jamming Environment[C]. Proceedings of the 63rd Annual Meeting of The Institute of Navigation, 2007: 742-748.
[5] Horslund J M, Hooker J R. Increase Jamming Imtnumity by Optimizing[C]. Procesisng Gain For GPS/INS Systems, US Patent,2004: 380-384.
[6] Petovello M G, O'Driscoll C, Lachapelle G. Ultra-Tight GPS/INS for Carrier Phase Positioning in Weak Signal Environment[C].NATO RTO SET-104 Symposium on Military Capabilities Enabled by Advances in Navigation Sensors, 2007.
[7] Jeff M, Horslund, Jonathan R. Increase Jamming Immunity by Optimizing Processing Gain for GPS/INS Systems[P]. US, 5983160, 1999.
[8] Anthony S, Abbott, Walter E. Global Positioning Systems and Inertial Measuring Unit Ultra Tight Coupling Method[P]. US, 6516021, 1999.
[9] Donald EGustafson.Deeply-Integrated Adaptive GPS-Based Navigator with Extended-Range Code Tracking[P]. US 6331835, 2001.
[10] Lashley M, Bevly D M, and Hung J Y. Analysis of Deeply Integrated and Tightly Coupled Architectures[C]. Proceedings of IEEE/ION PLANS 2010, 2010: 382-396.
[11] Ernest J Ohlmeyer. Analysis of an Ultra-Tightly Coupled GPS/INS System in Jamming[C]. Proceedings of IEEE/ION PLANS 2006, 2006: 44-53.
Research on GPS/INS Ultra-Tight Integration in High-Dynamic Environment
Xu Han1,2,Zeng Chao2,Huang Qinghua2
1. Nanjing University of Science and Technology, NanJing 210094,China 2. Institute of Electronic Engineering, CAEP, MianYang 621999,China
Thecurrentcenturyistheeraofrapiddevelopmentofinformationtechnology,andintegratednavigationwhichdependsonthedevelopmentofinformationtechnologyisfocusedincreasingly,whichleadstomoreandmorerequirementincomprehensiveapplicationofintegratednavigation.Theperformanceoftrackingloopcanbedowngradedinplatforminhigh-dynamicenvironment,whichcanreduceprecisionofnavigationandevenbringintenseerror.Loosecouplingandtightcouplingcandemonstrateerroraccumulationandheavycalculationrespectivelyinhigh-dynamicenvironment.Theultra-tightintegrationfeatureisintroducedinthispaper,andmodelandcalculationprocessaredemonstratedinhigh-dynamicenvironment.Severalmodelsofultra-tightintegrationareproposedduetothearisingprobleminhigh-dynamicenvironment.Theresultshowsthatultra-tightintegrationcannavigateaccuratelywithlesstimebycomparinghigh-dynamicnavigationwithtraditionnavigation.
Ultra-tightintegration;Phasedetector;Pre-filter;ERC;UKF;Interactingmultiplemodels(IMM)
2015-12-30
徐 韩(1984-),男,四川人,博士研究生,主要研究方向为组合导航、数据融合;曾 超(1968-),男,四川人,博士生导师,主要从事武器电子学系统科学,常规武器引信等领域的研究;黄清华(1972-),男,四川人,研究员,主要研究方向为复杂电子系统分析、综合与仿真。
TJ765
A
1006-3242(2016)04-0059-05
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
现代信息科技(2019年16期)2019-09-10
科学与财富(2018年2期)2018-03-16
无线电工程(2017年10期)2017-09-28
中国科技纵横(2017年2期)2017-03-24
大科技(2016年1期)2016-07-17
国防科技大学学报(2015年3期)2015-03-09
电子设计工程(2015年6期)2015-02-27
西部广播电视(2015年6期)2015-02-27
电脑知识与技术(2014年11期)2014-06-18
