
基于干扰观测器的飞行器再入姿态广义预测控制
2016-07-21 04:54朱如意
航天控制 2016年4期
孙 光 朱如意 王 征
中国运载火箭技术研究院研究发展中心,北京100076
基于干扰观测器的飞行器再入姿态广义预测控制
孙 光 朱如意 王 征
中国运载火箭技术研究院研究发展中心,北京100076

考虑飞行器模型中的不确定和干扰失配问题,针对再入飞行器提出了一种基于非线性干扰观测器的广义预测控制方法。首先,在姿态子系统中引入虚拟广义预测控制,通过非线性观测器实现对控制器中未知干扰的估计;其次,对姿态角速度子系统利用广义预测控制方法进行实际控制输入设计时,为简化计算,将虚拟控制的导数作为不确定项同未知干扰一起利用非线性干扰观测器进行了估计;最后,基于Lyapunov理论证明了飞行器姿态收敛到期望姿态的有界小邻域内。仿真结果验证了此方法的有效性。 关键词 再入飞行器;干扰观测器;广义预测控制
再入飞行器再入返回过程中飞行轨迹涵盖外层空间、稀薄大气层以及稠密大气层,飞行速度从亚音速、超音速到高超音速甚至接近轨道速度,如此大跨度的飞行范围使其模型特性变化显著。另外,各通道间气动耦合、惯性耦合、运动学耦合严重及各种不确定性外部扰动、建模误差和系统参数不确定的存在,导致姿态控制变得异常复杂。为保证飞行器飞行控制的性能,必须有效抑制上述复合干扰的影响。
预测控制能有效克服受控对象的模型不确定性,并表现出良好的控制性能而得到广泛的应用,其应用范围已从最初的工业生产延伸至航空航天领域[1-3]。文献[4]采用模型预测控制对升力体再入飞行器系统进行了反馈线性化设计。文献[5]针对具有强耦合、强非线性控制输入约束的高超声速飞行器纵向弹性模型, 采用滚动时域H∞优化控制设计了鲁棒模型预测控制器,有效抑制了参数不确定和弹性模态的影响。近年来,对具有封闭解析形式的非线性广义预测控制律的研究引起了很大关注。文献[6]应用广义预测方法研究了空天飞行器的姿态控制,取得了很好的效果。文献[7-8]结合模糊控制理论,针对受模型不确定性和外界干扰的航天器系统将姿态跟踪加速度误差引入性能指标,设计了广义预测控制器,同时利用模糊逻辑系统对模型不确定性和外部干扰进行了逼近,效果较好。
为了保证干扰对控制系统的稳定性能,近几年,出现了许多关于干扰观测器的控制方法。当系统模型中干扰相对阶不大于控制相对阶时,针对再入飞行器鲁棒姿态控制问题,文献[9]提出了一种基于高阶滑模观测器的自适应时变滑模控制器设计方法。文献[10]设计了一种基于扰动观测器的全局鲁棒的指数时变滑模姿态控制器,实现了精确的姿态控制。文献[11]基于模糊自适应干扰观测器设计输出反馈控制器,解决了具有惯性参数不确定性与外界干扰的自由漂浮空间机械臂的鲁棒跟踪控制问题。当系统模型中存在干扰失配(干扰相对阶小于控制相对阶)时,文献[12]采用一种非线性干扰观测器和反馈线性化相结合的控制方法实现了永磁同步电机系统的输入输出线性化。文献[13]针对包含多源干扰的非线性导弹系统,提出了一种基于非线性干扰观测器的指令滤波反步控制方法。文献[14]针对高超音速飞行器这一非线性MIMO系统,采用超扭曲算法设计干扰观测器,提出一种鲁棒反步控制方法,实现了观测误差的有限时间收敛。文献[15]针对导弹的末端制导问题设计了非奇异末端滑模控制与有限时间干扰观测器,很好的保证了干扰抑制性能。
本文借鉴以上2种方法,针对再入飞行器不确定非线性MIMO系统,提出一种基于非线性干扰观测器的广义预测控制方法。设计过程中,充分考虑模型中的干扰失配问题,分别针对姿态子系统和姿态角速度子系统设计了非线性干扰观测器和广义预测控制器,较好地处理了模型不确定和干扰失配问题,通过仿真验证了所设计控制器的有效性。
1 飞行器再入模型
1.1 三自由度质心平动模型
考虑地球自转对再入运动的影响,将飞行器视作质点,则三自由度质心平动方程[16]可写为:
(1)
(2)
式中,re,φ,θ分别表示飞行器飞行过程中所处的地心矩、经度和纬度;υ,χ,γ分别表示飞行速度、航向角和航迹角;g0为地球引力常数,ΩE为地球自转角速度;L,D,Y分别表示飞行器再入过程中受到的升力、阻力和侧力。
1.2 三自由度质心转动模型
绕质心运动的三自由度转动方程为:

φsinχ)+
(cosφcosχsinγ-sinφcosγ))

φ


φcosχsinγ+sinφcosγ)
(3)
(4)
式中,α,β,σ分别表示攻角、侧滑角和倾斜角;p,q,r分别表示滚转角速度、俯仰角速度和偏航角速度;Mx,My,Mz分别表示滚转、俯仰和偏航通道的控制力矩;I为飞行器的转动惯量。
1.3 面向姿控设计的飞行器模型
由以上模型可以看出,质心转动方程与质心平动方程之间耦合严重,不便于控制器设计。为简化控制器设计,这里将质心平动对转动的影响作为不确定处理,建立面向姿控设计的飞行器模型:
(5)

(6)

(7)
将式(7)整理可得
(8)

2 基于干扰观测器的广义预测控制
本文的控制目标是:考虑面向姿控设计的飞行器模型式(6)和(8),当存在模型不确定性和外界干扰力矩时,设计控制器使飞行器姿态α,β,σ跟踪期望的姿态αr,βr,σr,即
对于面向姿控设计的飞行器模型式(6)和(8),带有干扰观测器的广义预测控制器的设计思路包括:1)将姿态运动方程作为第1个子系统,设计虚拟广义预测控制输入,在此基础上对控制器中的不确定设计观测器进行估计和补偿;2)将姿态角速度动力学方程作为第2个子系统,设计广义预测控制输入,即整个被控系统的真实输入,同样在此基础上对控制器中的不确定设计观测器进行估计和补偿。以下给出带有干扰观测器的广义预测控制器的具体设计过程。
2.1 姿态子系统控制器设计
2.1.1 姿态子系统的预测控制器设计
这里通过设计控制律使以下优化性能指标
(9)
应用Taylor公式,t+τ时刻的姿态q(t+τ)及其导数的预测值可近似写为:


(10)

同理,t+τ时刻的期望参考姿态qr(t+τ)及其导数的预测值可近似表示为:
(11)

(12)

定义姿态角跟踪误差及姿态角速度误差为:
(13)
(14)
其中,ωd(t)为待设计的虚拟控制输入,qr(t)=[αr,βr,σr]T。

(15)

(16)

(17)

(18)
(19)
根据定义可以计算出
定理1 对于飞行器姿态子系统式(6),在形如式(19)的虚拟控制作用下,闭环系统是全局渐近稳定的。
证明 结合式(13)和(14),将虚拟预测控制律式(19)代入飞行器姿态运动学方程式(6),可得闭环系统方程为:
(20)

2.1.2 姿态子系统的干扰观测器设计
上述虚拟控制律中包含有未知项,因此无法执行。这里对Tn作如下假设对其进行非线性观测器设计。

(21)
对于系统式(21)中的不确定项Tn,设计非线性干扰观测器为:
(22)

(23)
2.1.3 姿态子系统的基于干扰观测器的广义预测控制
设计如下带有干扰观测器的虚拟控制
(24)

(25)

2.2 姿态角速度子系统的控制器设计
2.2.1 姿态角速度子系统的预测控制器设计
基于姿态角子系统控制器的设计,以下进行姿态角速度子系统的实际控制器设计。
这里通过设计控制律使以下优化性能指标
(26)

类似姿态角子系统设计方法,可以得到使性能指标(26)最小的预测控制律为:
(27)
根据定义可以计算出
定理2 对于飞行器姿态动力学子系统(8),在形如式(27)的控制作用下,闭环系统是全局渐近稳定的。
证明 将预测控制律(27)代入飞行器姿态动力学方程(8),可得到闭环系统方程为:
(28)

2.2.2 姿态角速度子系统的干扰观测器设计

(29)
对于系统式(29)中的不确定项设计非线性干扰观测器为:
(31)
2.2.3 姿态角速度子系统的基于干扰观测器的广义预测控制
设计如下带有干扰观测器的控制
(32)
(33)

3 主要结果
定理3 对于面向姿控设计的飞行器模型式(6)和(8),在控制律式(24)和(32)以及干扰观测器式(22)和(30)的控制作用下,闭环系统的姿态将收敛至期望姿态附近的小邻域之内。
(34)
因此,闭环系统的姿态将收敛到期望姿态附近的小邻域之内。
4 仿真分析





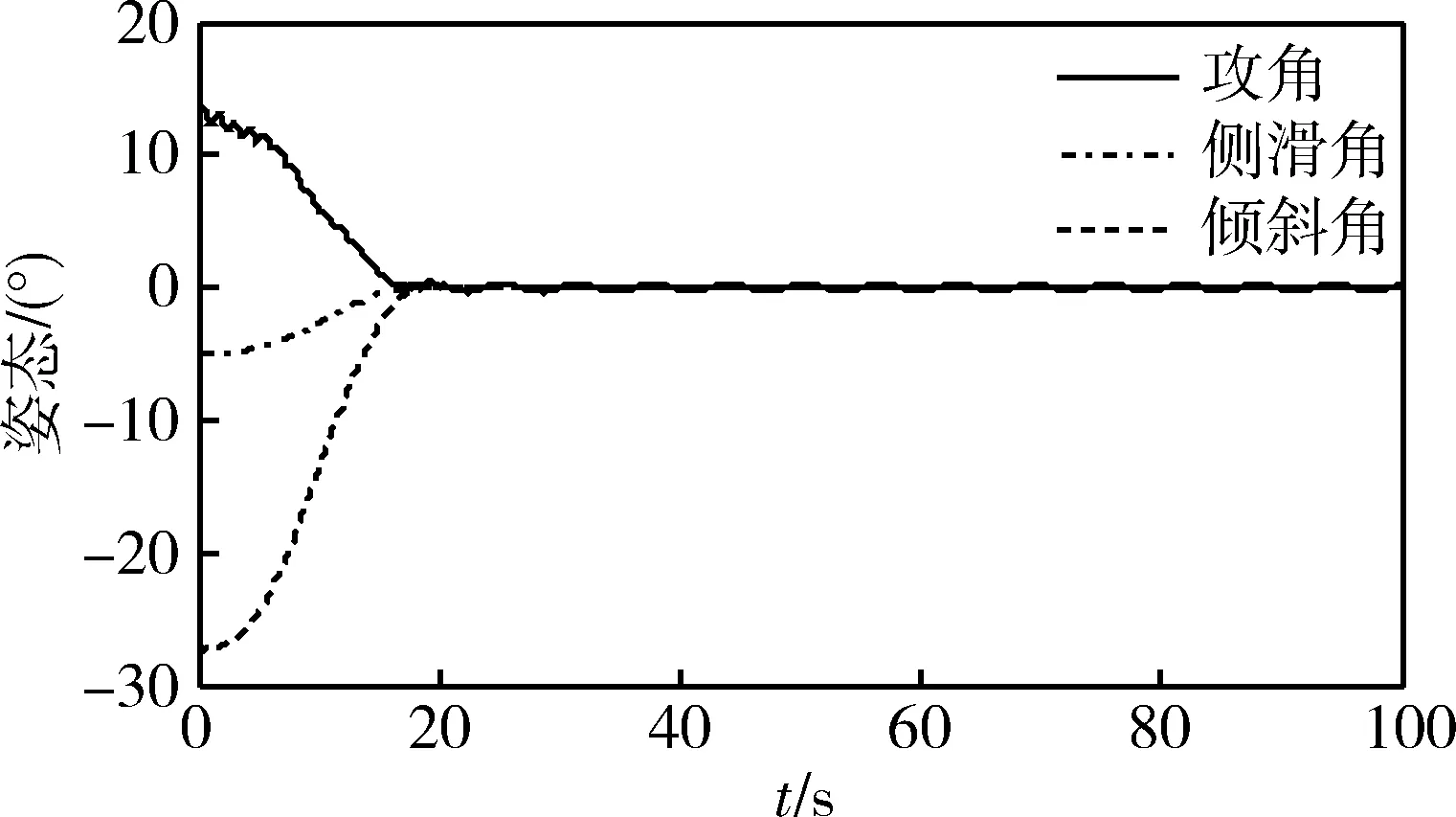
图1 姿态角变化
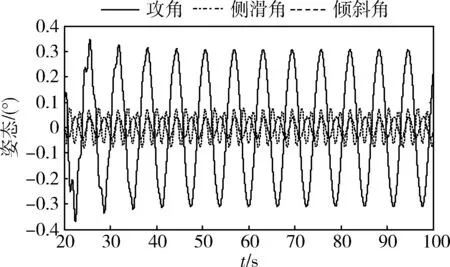
图2 20s后的姿态变化放大
从仿真结果可以看出,尽管模型中存在较大的惯性不确定性和未知外部干扰,但利用本文所设计的控制律能使飞行器姿态收敛到期望姿态附近的有界小邻域内,具有良好的控制精度。
5 结束语
针对再入飞行器这一不确定非线性MIMO系统,提出了一种基于非线性干扰观测器的广义预测控制方法。对姿态子系统,设计虚拟的预测控制,利用非线性干扰观测器估计虚拟控制中的不确定;对于姿态角速度子系统,利用广义预测控制方法设计真实控制输入,同样利用干扰观测器对未知干扰进行逼近,为了简化计算,在设计干扰观测器时一并将虚拟控制的导数作为不确定进行了处理。本文充分考虑了模型中的干扰失配问题,结合广义预测控制方法,解决了模型不确定和干扰失配对系统的影响。通过仿真验证了所设计控制器的有效性。
[1]LuP.OptimalPredictiveControlforContinuousNonlinearSystems[J].InternationalJournalofControl, 1995, 62(3): 633-649.
[2]SoroushM,SoroushHM.Input-outputLinearisingNonlinearModelPredictiveControl[J].InternationalJournalofControl, 1997, 68(6): 1449-1473.
[3]ChenWH,BalanceDJ,GawthropPJ.OptimalControlofNonlinearSystems:aPredictiveControlApproach[J].Automatica, 2003, 39: 633-641.
[4]RecasensJJ,ChuQP,MulderJA.RobustModelPredictiveControlofaFeedbackLiberalizedSystemforaLifting-bodyRe-entryVehicle[J].AIAAGuidance,NavigationandControlConferenceandExhibit, 2005, 1-33.
[5] 秦伟伟, 刘刚, 汪立新,等. 基于参数依赖滚动时域H∞控制的高超声速飞行器控制 [J]. 控制与决策, 2014, 29(3): 403-410. (QinWeiwei,LiuGang,WangLixin,etal.ParameterDependedRecedingHorizonH∞ControlforaHypersonicVehicle[J].ControlandDecision, 2014, 29(3): 403-410.)
[6]FanW,JiangCS.NonlinearPredictiveControlofanAerospaceVehiclebasedonAdaptiveFuzzySystems[J].ActaAeronauticaetAstronauticaSinica, 2008, 29(4):988-994.
[7]SunG,HuoW.Direct-adaptiveFuzzyPredictiveControlofSatelliteAttitude[J].ACTAAutomaticaSinica, 2010, 36(8): 1151-1159.
[8]SunG,HuoW.IndirectAdaptiveFuzzyPredictiveControlforAttitudeTrackingofSatellites[J].JournalofSystemsScienceandMathematicalSciences, 2009, 29(10): 1327-1342.
[9] 王亮, 刘向东, 盛永智. 基于高阶滑模观测器的自适应时变滑模再入姿态控制 [J]. 控制与决策, 2014, 29(2): 281-286. (WangLiang,LiuXiangdong,Sheng
Yongzhi. High-Order Sliding Mode Observer Based Adaptive Time-Varying Sliding Mode for Re-entry Attitude Control [J]. Control and Decision, 2014, 29(2): 281-286.)
[10] 王亮, 刘向东, 盛永智,等. 基于扰动观测器的指数时变滑模再入姿态控制 [J]. 中国空间科学技术, 2013, 8(4): 31-38. (Wang Liang, Liu Xiangdong, Sheng Yongzhi, et.al. Disturbance Observer Based Exponential Time-varying Sliding Mode for Re-entry Attitude Control [J]. Chinese Space Science and Technology, 2013, 8(4): 31-38.)
[11] Chu Z Y, Cui J, Sun F C. Fuzzy Adaptive Disturbance-Observer-Based Robust Tracking Control of Electrically Driven Free-Floating Space Manipulator [J]. IEEE Systems Journal, 2014, 8(2): 343-352.
[12] Chai H Y, Yan P, Guo L. Feedback Linearization Design for Permanent Magnet Synchronous Motor with Disturbance Observer[C]. Proceedings of the 32nd Chinese Control Conference, 2013, 2739-2744.
[13] Lu H, Wang N, Qiao J Z, et al. Nonlinear Disturbance Observer Based Command Filtered Backstepping Control for Missile System[C]. Proceedings of the 32nd Chinese Control Conference, 2013, 4311-4316.
[14] 王首斌, 王新民, 谢蓉,等. 基于干扰观测器的高超音速飞行器鲁棒反步控制[J]. 控制与决策, 2013, 28(10): 1507-1512. (Wang Shoubin, Wang Xinmin, Xie Rong, et al. Robust Backstepping Control Based on Disturbance Observer for Hypersonic Vehicle [J]. Control and Decision, 2013, 28(10): 1507-1512.)
[15] Jin S, Zhang Z X, Li S H. Design of Guidance Law Based on Nonsingular Terminal Sliding Mode Control and Finite-Time Disturbance Observer [J]. 13th IEEE Workshop on Variable Structure Systems, 2014.
[16] Desai P N, Conway B A. Six-Degree-of-Freedom Trajectory Optimization using a Two-Timescale Collocation Architecture [J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1308-1315.
Generalized Predictive Control of Vehicle Re-entry Attitude Based on Disturbance Observer
Sun Guang, Zhu Ruyi, Wang Zheng
Research and Development Center, China Academy of Launch Vehicle Technology, Beijing 100076, China
Ageneralizedpredictivecontrolmethodbasedonnonlineardisturbanceobserverisproposedforre-entryvehicleinreentryphaseduetothemodeluncertaintyandmismatchdisturbances.Firstly,thevirtualpredictivecontrolisinvolvedinattitudesubsystemandtheunknowndisturbancesofcontrollerisestimatedbyusingnonlinearobserver.Secondly,theactualcontrolinputisdesignedbyusingthemethodofgeneralizedpredictivecontrolwithattitudeangularvelocitysubsystem.Inordertosimplifycalculation,thederivateofvirtualcontrolandunknowndisturbancesintheactualcontrolareestimatedbyusingnonlinearobserver.Finally,theattitudetrackingerrorisconvergedtoaboundedneighborhoodofdesiredattitude,whichisbasedontheLyapunovanalysis.Thesimulationresultsshowtheeffectivenessofthemethod.
Re-entryvehicle;Disturbanceobserver;Generalizedpredictivecontrol
2015-10-14
孙 光(1980-),男,山东人,博士研究生,工程师,主要研究方向为飞行器导航、制导与控制;朱如意(1985-),女,安徽人,硕士研究生,工程师,主要研究方向为飞行器导航、制导与控制;王 征(1986-),男,北京人,硕士研究生,工程师,主要研究方向为飞行器导航、制导与控制。
TP273
A
1006-3242(2016)04-0010-06
