
基于反演的高超声速飞行器动态面滑模控制
2016-07-21 04:54谭诗利王鹏飞
航天控制 2016年4期
谭诗利 王 洁 王鹏飞
空军工程大学,西安 710051
基于反演的高超声速飞行器动态面滑模控制
谭诗利 王 洁 王鹏飞
空军工程大学,西安 710051
针对高超声速飞行器纵向平面轨迹跟踪问题,提出一种基于反演的动态面滑模控制方法。引入一阶滤波器以避免传统反演控制的“微分项膨胀”问题,利用双曲正切函数的平滑特性以减弱抖振,设计自适应估计律,对干扰项在线估计以增强鲁棒性。仿真结果表明,该方法对高度和速度控制指令具备良好的跟踪性能。 关键词 高超声速飞行器;滑模控制;动态面控制;反演控制;滤波器
高超声速飞行器在民用和军事领域有重要的应用前景,已成为各国研究的热点。相比常规飞行器,高超声速飞行器模型更复杂,具有显著的非线性特性,且存在严重的结构弹性和热弹性效应,模型不确定性增加[1]。这些特征给控制器的设计带来了全新挑战。
反演方法解决了高阶非线性系统控制器设计复杂的难题,已被广泛运用到高超声速飞行器的控制中[2-4]。但单纯的反演在解决高阶系统的控制问题时易产生“微分膨胀”,且存在鲁棒性不强的缺点。动态面作为传统反演的补充,有效解决了“微分膨胀”问题且取得了很好的控制效果[5-6]。动态面控制方法可以避免高阶求导引起系统发散的问题,并能减小计算量[7]。滑模控制无需参数辨识且具备较强的鲁棒性,文献[8]使用Terminal滑模用于解决高超声速飞行器控制问题,文献[9]设计了自适应滑模控制器,增强了控制系统的鲁棒性。
本文针对高超声速飞行器纵向平面控制问题,首先给出面向控制模型,并分析其不确定项;然后结合反演和滑模控制方法设计控制器,设计动态面用于避免 “微分膨胀”,设计自适应估计律对干扰进行估计增强鲁棒性;最后,仿真验证了闭环控制系统的稳定性和动态性能。
1 高超声速飞行器模型
纵向平面的高超声速飞行器控制主要任务是通过控制输入量u=[Φδe]T(分别表示燃料当量比和升降舵偏角)来实现对参考值yref=[Vrefhref]T的快速稳定跟踪。国内外高超声速飞行器研究领域最常用的模型是由Bolender和Doman提出的弹性体模型[10]:
(1)
式中:V和h分别为飞行高度和速度;γ和α分别为航迹角和迎角;Q为俯仰角速度;ηi为弹性状态量;μ为万有引力常数;zT为推力相对于质心的力臂;m和Iy分别为飞行器质量及其沿y轴的转动惯量;ζi和ωi分别为阻尼比和自然振动频率;L,D,T及M分别为飞行器的升力、阻力、推力及俯仰力矩;Re为地球半径;Ni为广义弹性力。
式(1)所示的模型不仅含刚体状态量X=[V,h,γ,α,Q]T,还含弹性状态量,能逼真地反应系统的工作原理,但式(1)结构复杂,参数、变量多,方程阶次高,且方程形式复杂,直接用于控制器的设计不可行。针对这一情况,将式(1)中飞行器的升力L、阻力D、推力T及俯仰力矩M,广义弹性力Ni拟合成如下形式[11]:
(2)

将式(2)拟合的作用力或力矩代入飞行器的动力学方程式(1)中,推导出面向控制的严格反馈形式模型,如式(3)~(7)所示:
(3)
(4)
(5)
(6)
(7)

在式(3)~(7)中,di(i=V,h,γ,α,Q)为因式(2)中曲线拟合而引入的误差。令θi∈{θTθLθDθM}分别为推力、升力、阻力和俯仰力矩的拟合误差,θh为Tsinα和Vsinγ的近似误差系数,则
dV=(θTcosα-θD)/m,
dh=θhVγ2/2,
dγ=(θL+θTsinα)/mV,
dα=-dγ,
dQ=(zTθT+θM)/Iy。
在如式(3)~(7)所示的面向控制模型中,只含有刚体状态量X=[V,h,γ,α,Q]T,这是由于弹性状态量η在工程实践中无法测量,因此将弹性振动对刚体运动的影响计入拟合误差,这符合所设计控制器的工程实用性要求,并且如果设计的控制器具有鲁棒性,就能稳定弹性振动对飞行器刚体运动产生的影响。
综上,式(1)所示模型作为第4节仿真验证时的对象模型,用于验证所设计控制器的有效性。式(3)~(7)所示模型则用于第2节中控制器的具体设计。
2 控制器设计
2.1 速度控制器设计
速度由式(3)所示的一阶系统决定,速度V的大小主要受燃料当量比Φ的控制。基于滑模控制的设计思想,定义滑模面σV=V-Vref,则有
(8)
设计控制量Φ为

(9)
2.2 高度控制器设计
高度由式(4)~(7)组成的四阶系统决定,升降舵偏角δe引起俯仰角速度Q的变化,进而引起攻角α的变化,及航迹角γ的变化,最后引起高度h的变化。基于反演设计的思想,δe为实际控制量,定义Qc,αc和γc为虚拟控制量,定义滑模面:
(10)
实际控制量和虚拟控制量设计为
(11)

定义一阶滤波器动态系统的估计误差为:
(12)
(13)
(14)
一阶滤波器设计如下:
(15)
(16)
(17)
式中,τγ,τα,τQ为时间常数。
2.3 干扰上界估计
(18)
(19)
(20)
(21)
(22)

3 稳定性分析
首先定义不确定项的估计误差为



(23)
选取Lyapunov函数
W=WV+Wh+Wγ+Wα+WQ
(24)
其中,
(25)
(26)
(27)
(28)
(29)

运用Lyapunov函数证明稳定性时,使用了2个引理:引理1和引理2。
引理1 对于任意和任意常数,有如下不等关系式成立,

(30)
其中,κ为常数,满足κ=exp[-(κ+1)],即κ≈0.2785。
引理2young′s基本不等式
±2xy≤cx2+(1/c)y2
(31)
其中,c>0为常数。

(32)
其中,ch,1,ch,2,cγ,cα,1和cQ,1为由Young’s基本不等式产生的常数,Δ取值如下:
(33)

4 仿真验证
飞行器在动压q=90148Pa,高度h=26212.8 m(86000ft)的初始巡航条件下,考虑典型的机动飞行情况:保持动压不变,高度指令的阶跃幅值为Δhc=1828.8m (6000ft)。将Δhc通过阻尼比ζn=0.95和自然频率wn=0.03rad/s的二阶参考模型环节,生成待跟踪的高度参考轨迹href(t)。仿真采用四阶Runge-Kuta数值求解,步长为0.001s。控制器的参数分别取值为:kV,1=2,kV,2=1.2,kh,1=1.5,kh,2=0.5,kγ,1=1.5,kγ,2=1,kα,1=2,kα,2=1.2,kQ,1=1.5,kQ,2=0.5,εi=0.01(i=h,γ,α,Q),滤波器参数分别为τα=τγ=τQ=0.1,自适应估计律的参数为βi=0.1,λi=10 (i=h,γ,α,Q)。仿真结果如图1~6所示。
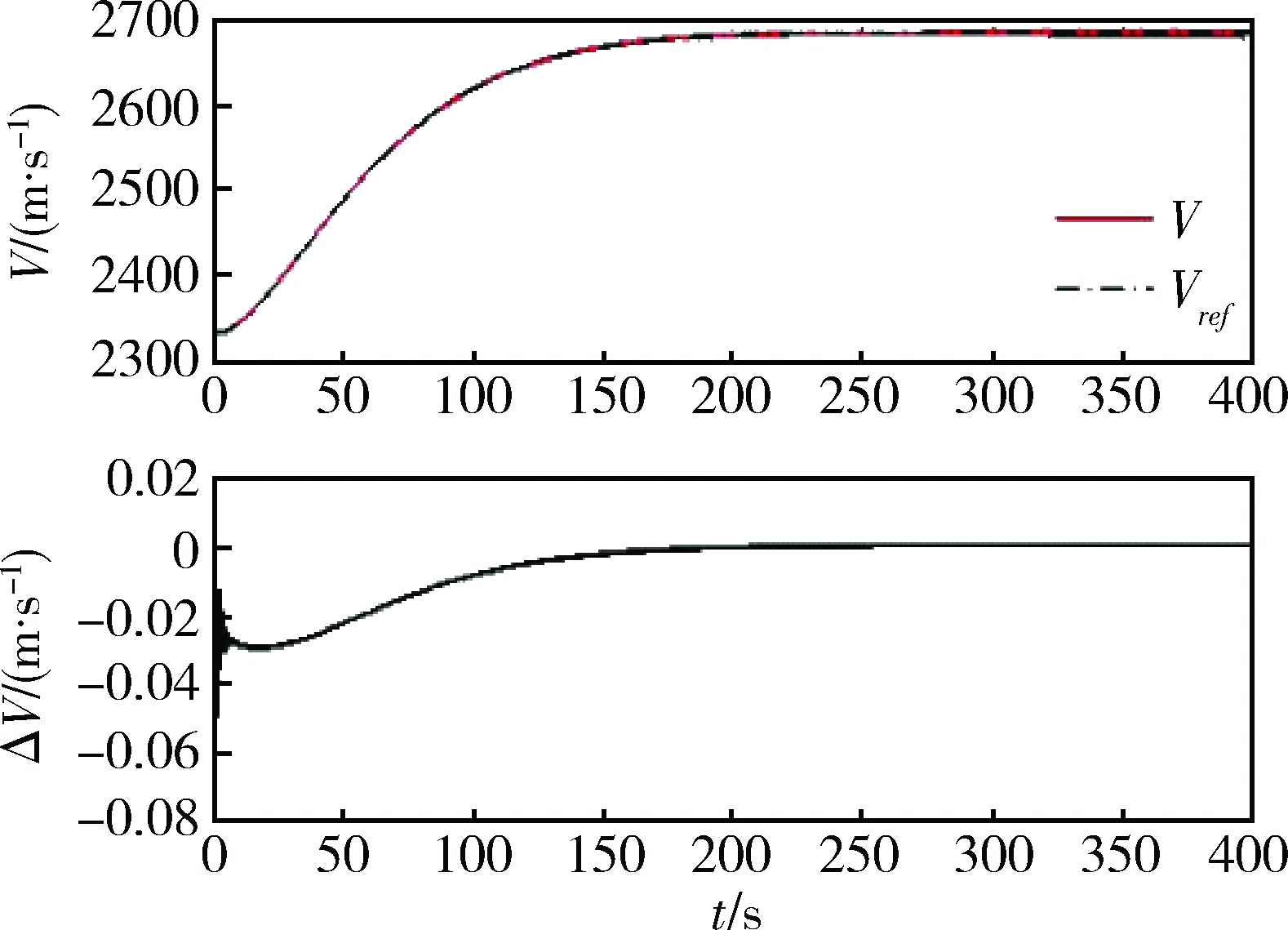
图1 速度跟踪及跟踪误差曲线

图2 高度跟踪及跟踪误差曲线
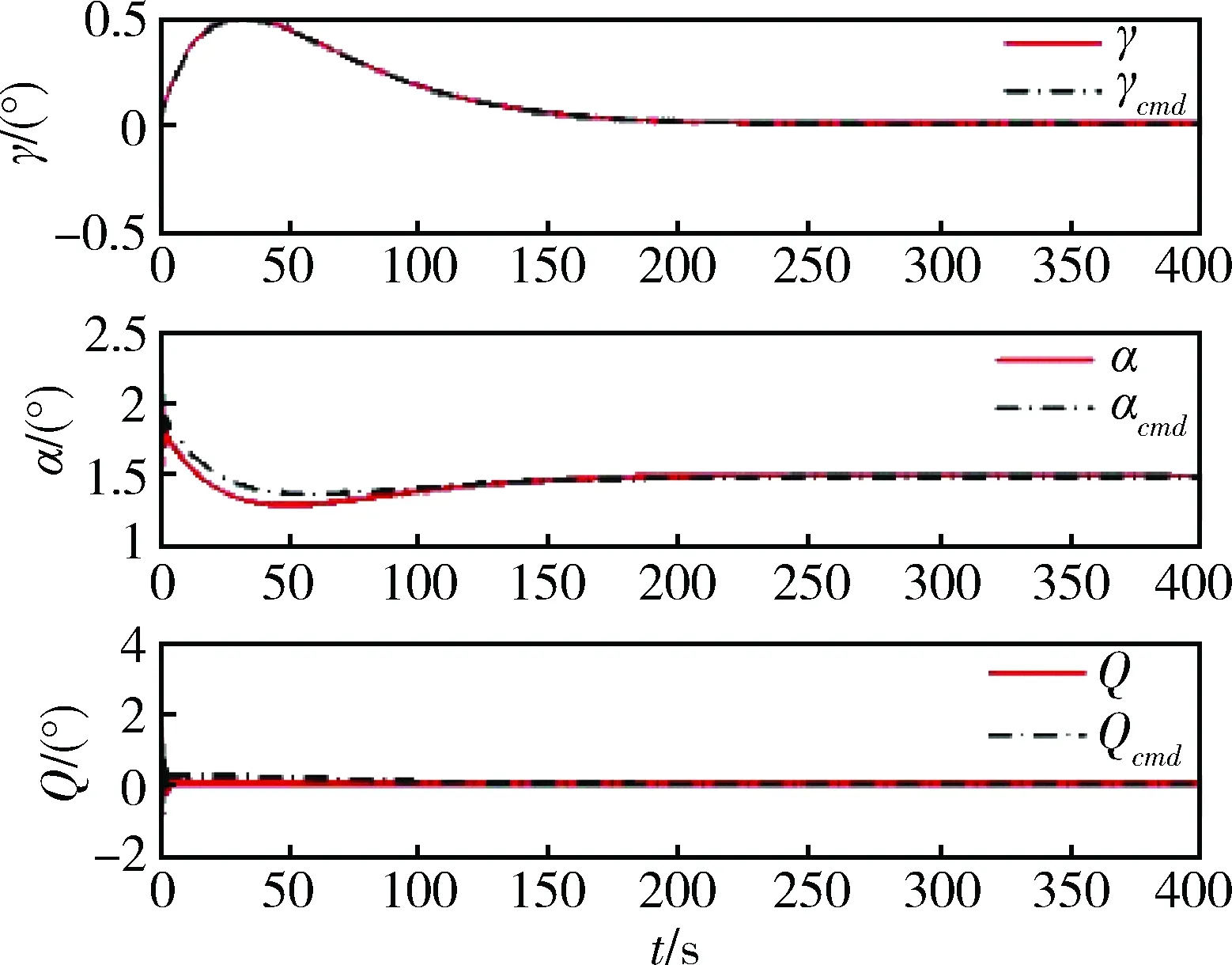
图3 航迹角、攻角和俯仰角跟踪曲线
图4 燃料当量比输入曲线

图5 升降舵偏角输入曲线
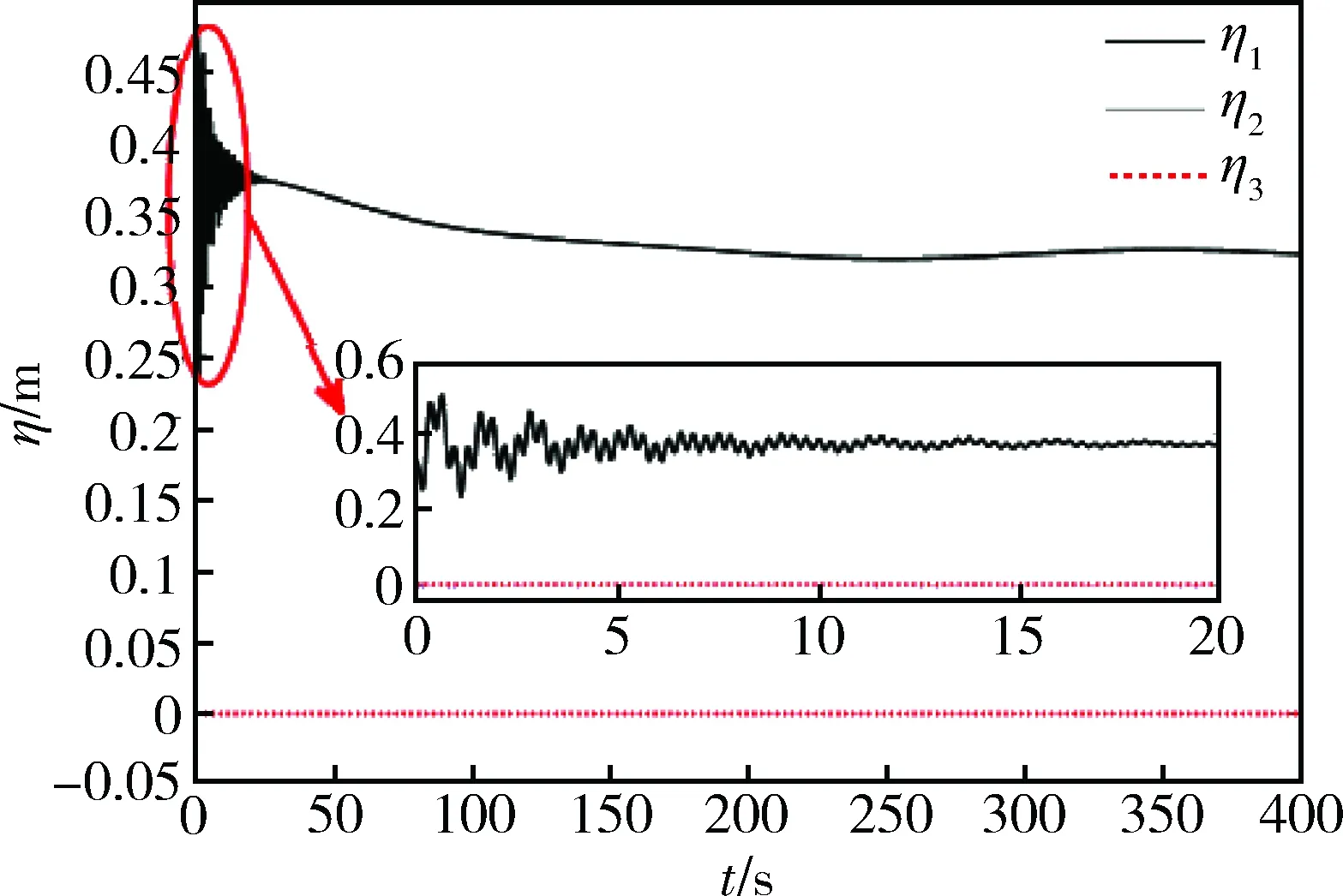
图6 弹性状态量变化曲线
由图1和2可知,实现了对参考飞行高度和速度的快速跟踪,并且稳态跟踪误差限定在零值附近。图3表明航迹角、攻角和俯仰角速度稳定地跟踪了指令信号。图4和5表明控制量输入平稳且在可实现的范围之内。图6表明在状态转移过程中,弹性模态的变化在系统允许的范围内。仿真结果说明设计的控制器达到了预定的控制目的。
5 结论
针对高超声速飞行器模型非线性、不确定性的特征,在反演设计的基础上,设计了一种动态面滑模控制器。引入一阶滤波器,避免了传统反演控制的“微分项膨胀”问题,利用双曲正切函数的平滑特性增强控制过程的稳定度,在控制器中设计滑模面的积分项消除静差。针对干扰上界的不确定设计自适应估计律,并引入自适应估计修正项,抑制自适应调节过程中的参数漂移,增强了控制器的鲁棒性。仿真结果表明,控制器很好地实现了对控制指令的跟踪且响应速度较快。
[1]FidanB,MirmiraniM,IoannouPA.FlightDynamicsandControlofAir-BreathingHypersonicVehicles:ReviewandNewDirections[C].AIAA-2003-7081, 2003.
[2] 时建明, 王洁, 王琨, 邵雷. 吸气式高超声速飞行器纵向运动反演控制器设计[J]. 西安交通大学学报, 2013, 47(3):102-107. (ShiJianming,WangJie,WangKun,ShaoLei.DesignofBacksteppigControllerforLongitudinalMotionofanAir-BreathingHypersonicVehicle[J].JournalofXi’anJiaotongUniversity, 2013, 47(3): 102-107.)
[3] 黄喜元,王青,董朝阳. 基于Backstepping的高超声速飞行器鲁棒自适应控制[J]. 系统工程与电子技术, 2011, 33(6): 1321-1326. (HuangXiyuan,WangQing,DongChaoyang.RobustAdaptiveControlofHypersonicVehiclesviaBacksteppingMethod[J].SystemsEngineeringandElectronics, 2011, 33(6): 1321-1326.)
[4]BialyBJ,KlotzJ,etal.AnAdaptiveBacksteppingControllerforaHypersonicAir-BreathingMissile[C].AIAA-2012-4468, 2012.
[5] 卜祥伟,吴晓燕,陈永兴,白瑞阳. 基于非线性干扰观测器的高超声速飞行器滑模反演控制[J]. 控制理论与应用, 2014, 31(11): 1473-1479. (BuXiangwei,WuXiaoyan,ChenYongxin,BaiRuiyang.Nonlinear-
disturbance-observer-basedSlidingModeBacksteppingControlofHypersonicVehicles[J].ControlTheory&Applications, 2014, 31(11): 1473-1479.)
[6] 于靖,陈谋,姜长生. 基于干扰观测器的非线性不确定系统自适应滑模控制[J]. 控制理论与应用,2014, 31(8): 993-999. (YuJing,ChenMou,JiangChangsheng.AdaptiveSlidingModeControlforNonlinearUncertainSystemsBasedonDisturbanceObserver[J].ControlTheory&Applications, 2014, 31(8): 993-999.)
[7] 梁勇,尚安利,邓方林. 一类非线性系统的动态面二阶滑模控制[J]. 系统工程与电子技术,2004,26(10):1468-1471. (LiangYong,ShangAnli,DengFanglin.DynamicSurfaceSecond-orderSlidingModeControlforaClassofNonlinearSystems[J].SystemsEngineeringandElectronics, 2004, 26(10): 1468-1471.)
[8] 王鹏,刘鲁华,吴杰. 高超声速飞行器Terminal滑模控制系统设计[J]. 航天控制,2012,30(5):9-14. (WangPeng,LiuLuhua,WuJie.TheTerminalSlidingModeControlSystemDesignforHypersonicFlightVehicle[J].AerospaceControl, 2012, 30(5): 9-14.)
[9]HuXX,WuLG,HuCH,etal.AdaptiveSlidingModeTrackingControlforaFlexibleAir-breathingHypersonicVehicle[J].JournaloftheFranklinlnstitute, 2012, 349(2): 559-577.
[10]MichaelA.BolenderandDavidB.Doman.NonlinearLongitudinalDynamicalModelofanAir-BreathingHypersonicVehicle[J].JournalofSpacecraftandRockets, 2007, 44(2): 374-387.
[11]FiorentiniL.NonlinearAdaptiveControllerDesignforAir-breathingHypersonicVehicles[D].Columbus:TheOhioStateUniversity, 2010.
The Dynamic Surface and Sliding Mode Controller Design for Hypersonic Vehicles
Tan Shili, Wang Jie, Wang Pengfei
Air Force Engineering University, Xi′an 710051, China
Adynamicsurfaceandslidingmodecontrollerisdesignedforthelongitudinaltrackofflexiblehypersonicvehicles.Thelow-passfirstorderfilterisintroducedtoobtainthederivativesofvirtualcontrollaws,whichavoidsdifferentiationteen’sexplosionintheoriginalback-steppingcontrol.Thehyperbolictangentfunctionisintroducedinsteadofsignfunctionforchatteringeliminationintheslidingmodecontrol.Adaptivedisturbanceobserverisintroducedtoestimateandcompensatethemodeuncertaintiestoincreasethecontroller′srobust.Theresultofreferencetrajectorytrackingsimulationshowstheeffectivenessofthiscontrollerbytrackingvelocityandaltitudecommands.
Hypersonicvehicles;Slidingmodecontrol;Dynamicsurface;Back-stepping;Filter
2015-07-29
谭诗利(1991-),男,湖北利川人,博士研究生,主要研究方向为高超声速飞行器控制理论与方法;王 洁(1967-),女,陕西渭南人,博士,教授,主要研究方向为非线性控制理论;王鹏飞(1988-),男,河南开封人,博士研究生,主要研究方向为高超声速飞行器受限弹性控制。
TP273
A
1006-3242(2016)04-0023-06
猜你喜欢
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
价值工程(2016年35期)2017-01-23
软件导刊(2016年11期)2016-12-22
系统工程与电子技术(2016年7期)2016-08-21
现代工业经济和信息化(2016年7期)2016-05-17
火控雷达技术(2016年2期)2016-02-06
现代电子技术(2015年1期)2015-04-13
电测与仪表(2014年1期)2014-04-04
