小型无人机姿态航向参考硬件系统
2016-07-19 01:16:06王晓璐任淑红
长春工业大学学报 2016年3期
代 君, 王晓璐, 任淑红
(郑州航空工业管理学院, 河南 郑州 450001)
小型无人机姿态航向参考硬件系统
代君,王晓璐,任淑红
(郑州航空工业管理学院, 河南 郑州450001)
摘要:研究了姿态航向系统的硬件组成,包括单片机STM32F103、陀螺仪加速度计MPU6050和磁航向计HMC5883。进行了硬件系系统测试实验。
关键词:姿态航向参考系统; 陀螺仪; 加速度计; 磁航向计
0引言
姿态航向参考系统是小型无人机的控制系统,用于调整飞行姿态,控制飞行状态,因此,研究姿态航向参考系统对提高无人机整体水平、简化无人机操作等具有重要意义。
无人机的气动布局与有人飞机相比,可以更加激进,达到有人飞机无法达到的机动性能[1],做出更为复杂的机动动作,提高了飞行器的飞行性能;无人机可以在诸如高温、高腐蚀性、核辐射等有人飞机无法到达的环境工作,增大了飞行器的工作范围。
遥控方式是早期的无人机经常采用的唯一飞行控制方式。即由地面领航员在无人机起飞后经由地面站、靠设备测量得到的信息,用无线电设备遥控发送指令,使飞行器按照飞行过程的规定要求进行相应任务。随着无人机运用范围的扩大和需要的提升,这种方式渐渐无法满足对无人飞行器的要求。研究具有导航自主、飞行自主的全新无人机控制系统已成为目前的研究焦点。
姿态航向参考系统将扩大无人机的工作范围和工作条件[2],包括姿态航向参考系统在内的自主导航、自主飞行系统,使得无人机飞行对人和地面设备的依赖大大降低。
1硬件系统整体方案
硬件方案设计从飞行控制系统需求出发,根据机载微处理的硬件资源以及所选用器件的特性合理选择各个器件与微处理器的接口方式,并在设计时预留一些备用接口,飞行控制系统硬件总体方案如图1 所示。

图1 飞行控制系统硬件总体框架图
系统的硬件配置为:
1)配置一路I2C接口,用于实现对传感器MPU6050HMC5883L以及MS5611等I2C接口器件的数据采集。
2)配置一路串口,用于电路板与终端连接。
1.1使用器件简介
1.1.1陀螺仪加速度计MPU6050[3]
MPU-6050是世界上第一个6轴运动处理传感器。它集成了两个3轴的MEMS陀螺仪和加速度计,还有一个可扩展的数字运动处理器DMP,可以通过I2C接口接通到一个第三方的数字传感器,例如磁力计。
1.1.2磁航向计HMC5883[4]
HMC5883L 是一种高集成模块,带有16引脚,采用表面贴膜的方法进行安装。
磁航向计HMC5883实物图及引脚图分别如图2和图3所示。

图2 磁航向计HMC5883实物图
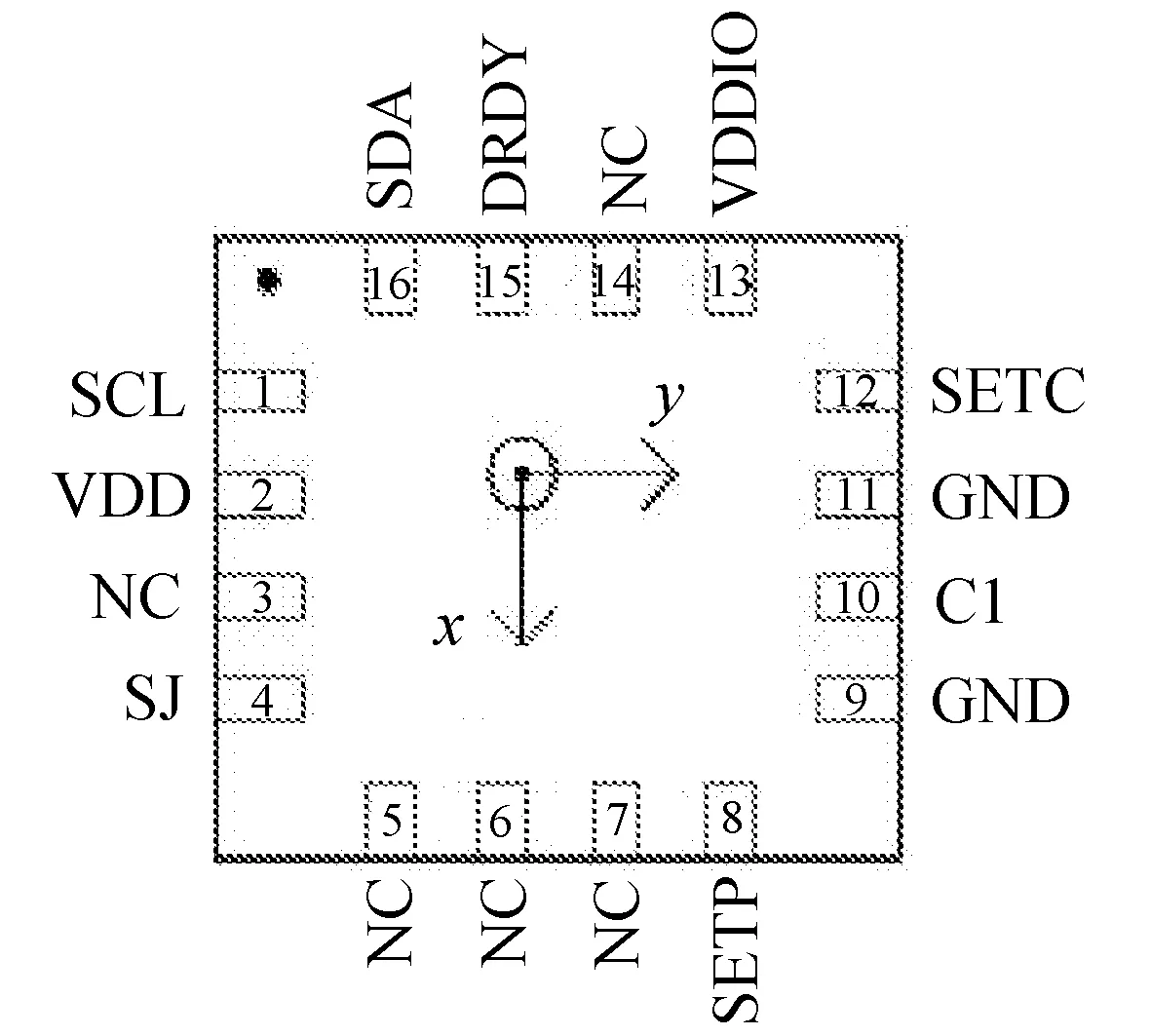
图3 磁航向计HMC5883引脚图
1.2控制系统原理图和PCB图
设计的小型无人机姿态航向参考系统PCB图采用两层板设计,如图4 所示。
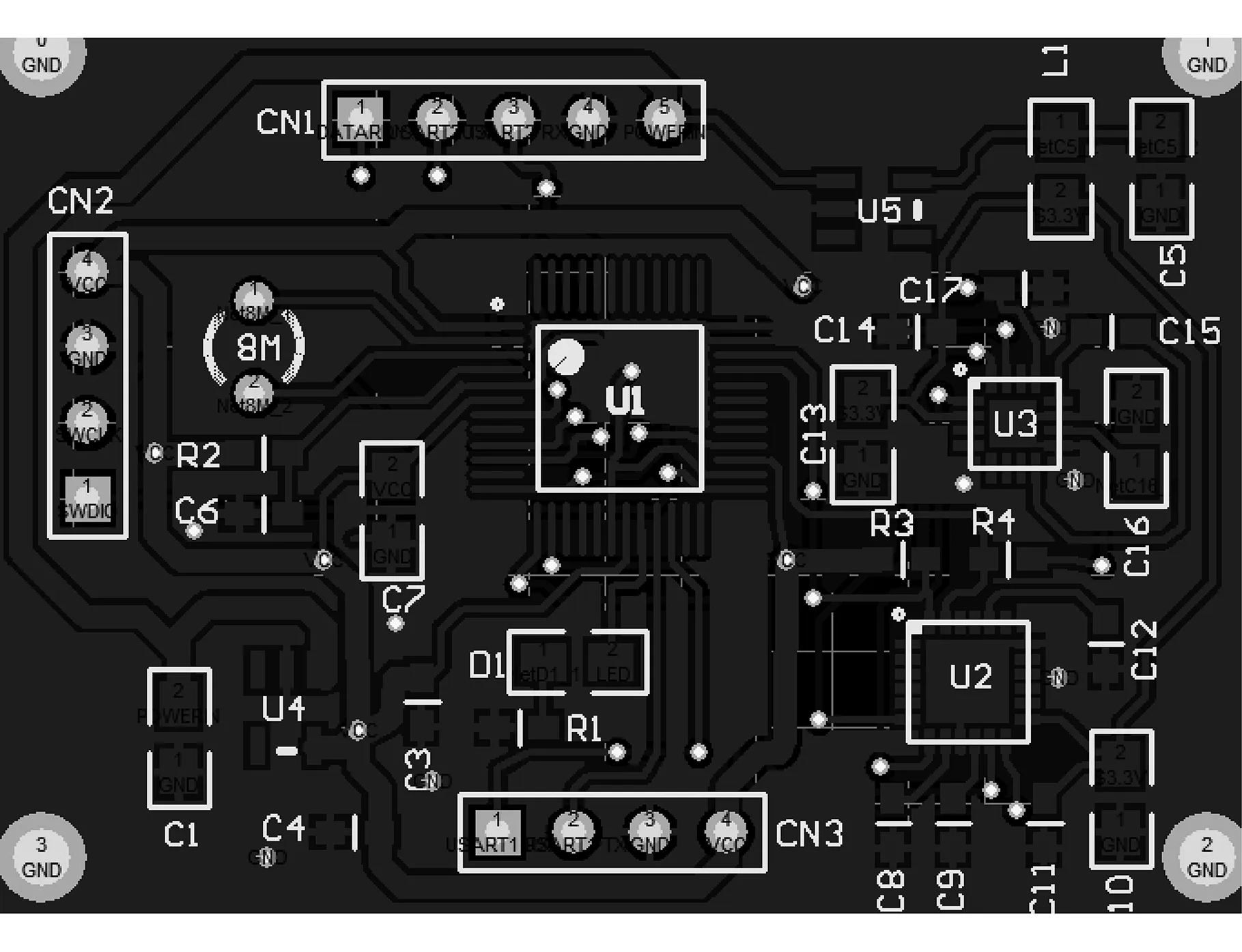
图4 姿态航向参考系统PCB图
设计的小型无人机姿态航向参考系统原理如图5 所示。
2硬件系统测试
硬件制作完成后,需要对陀螺仪加速度计和磁航向计进行测试,确定其是否正常工作。首先编写传感器底层驱动代码,对JSTM32F103进行软件开发[2]。
2.1开发环境的介绍
STM32[5]是以ARM核为基础的,很多基于ARM的开发软件都可以用于对STM32微处理器的开发。这里选用的开发软件是Keil MDK软件,它通过集成开发环境把诸如C语言编辑、库管理、仿真调试器等强大的功能组合在一起,是一款方便且强大的软件。
STM32库发布者提供的一套标准外设库,也被称为固件函数库或简称固件库,是一套完整的固件开发包,包括在STM32开发过程中用到的所有底层程序。该程序库还提供每一个外设的驱动描述和应用实例,通过该数据库使用者可以在不深入了解底层硬件细节的情况下调用各种外设,大大提高效率,降低使用的时间和精力成本。
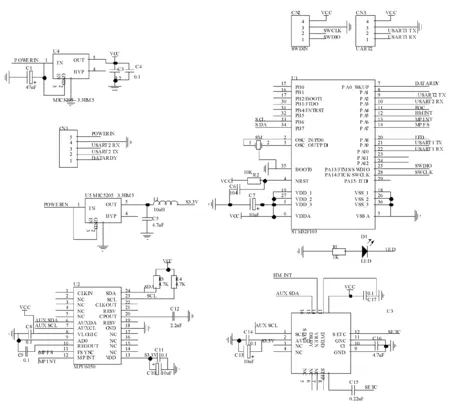
图5 姿态航向参考系统最终原理图
2.2I2C通信协议
I2C(Inter-Integrated Circuit)总线是一种简单的两线式串行总线,在使用中要求一条接串行数据线SDA,一条接串行时钟线SCL。由于使用简单而被人们广泛应用。
2.3陀螺仪测试
将陀螺仪置于静止状态下进行测试。
参考MPU6050的数据手册[6],其中陀螺仪的参数如图6所示。
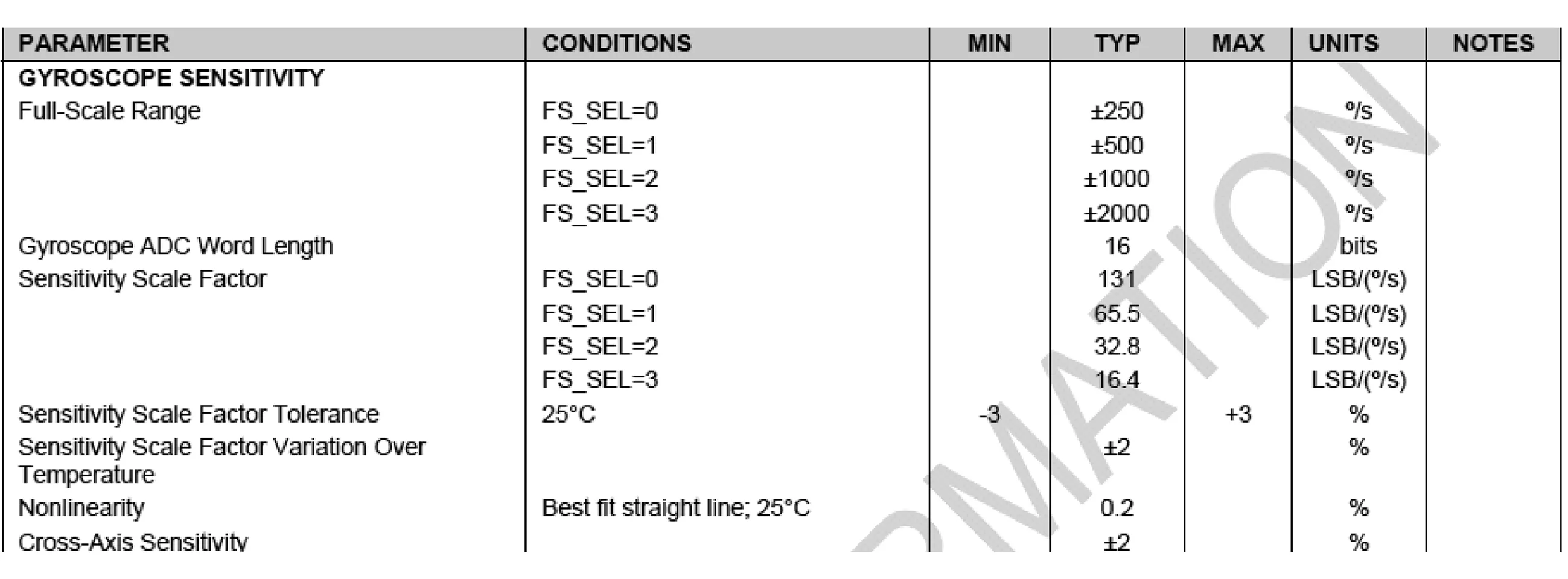
图6MPU6050的数据手册中陀螺仪相关参数
MPU 6050陀螺仪量程可以进行选择,通过设置寄存器来改变量程,例如将FS_SEL寄存器设置为0,其量程为±250 °/s;将FS_SEL寄存器设置为1,其量程为±500 °/s;将 FS_SEL寄存器设置为2,其量程为±1 000 °/s;将FS_SEL寄存器设置为3,其量程为±2 000 °/s。
从传感器中直接读取的数据为原始数据,将原始数据转化为真实的转速需要用到另一个参数,即标度因子(见图6),当选择量程为±250 °/s时,标度因子为131,将原始数据除以131即可得到真实的转速(°/s);同理,当选择的量程为±500 °/s时,标度因子为65.5,当量程为±1 000 °/s时,标度因子为32.8,量程为±2 000 °/s时,标度因子为16.4。
在此,设定陀螺仪的量程为±2 000 °/s,3轴的真实输出值分别如图7~图9所示。
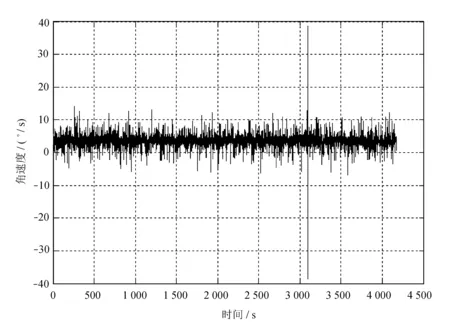
图7陀螺仪在x轴的角速度分量
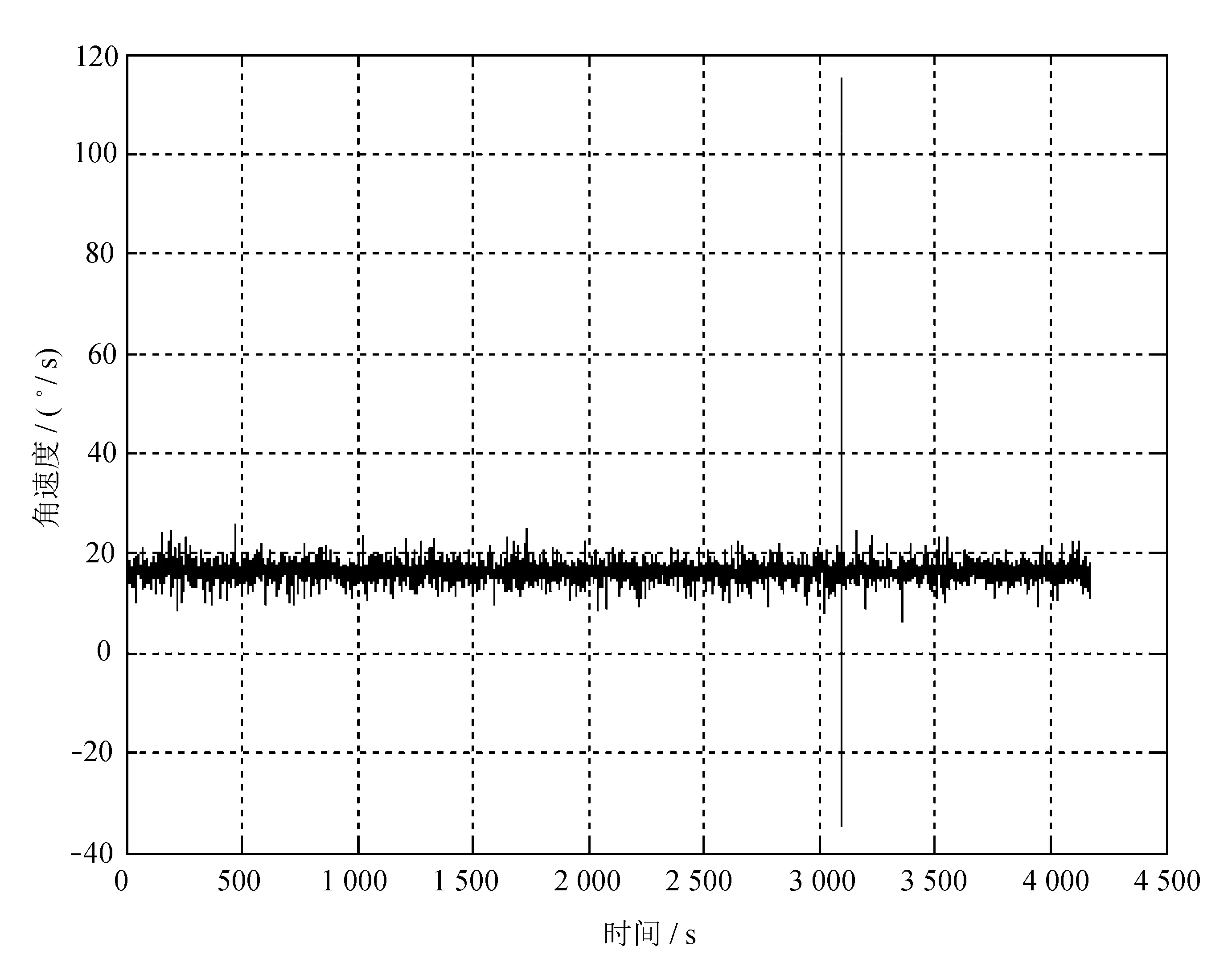
图8 陀螺仪在y轴的角速度分量
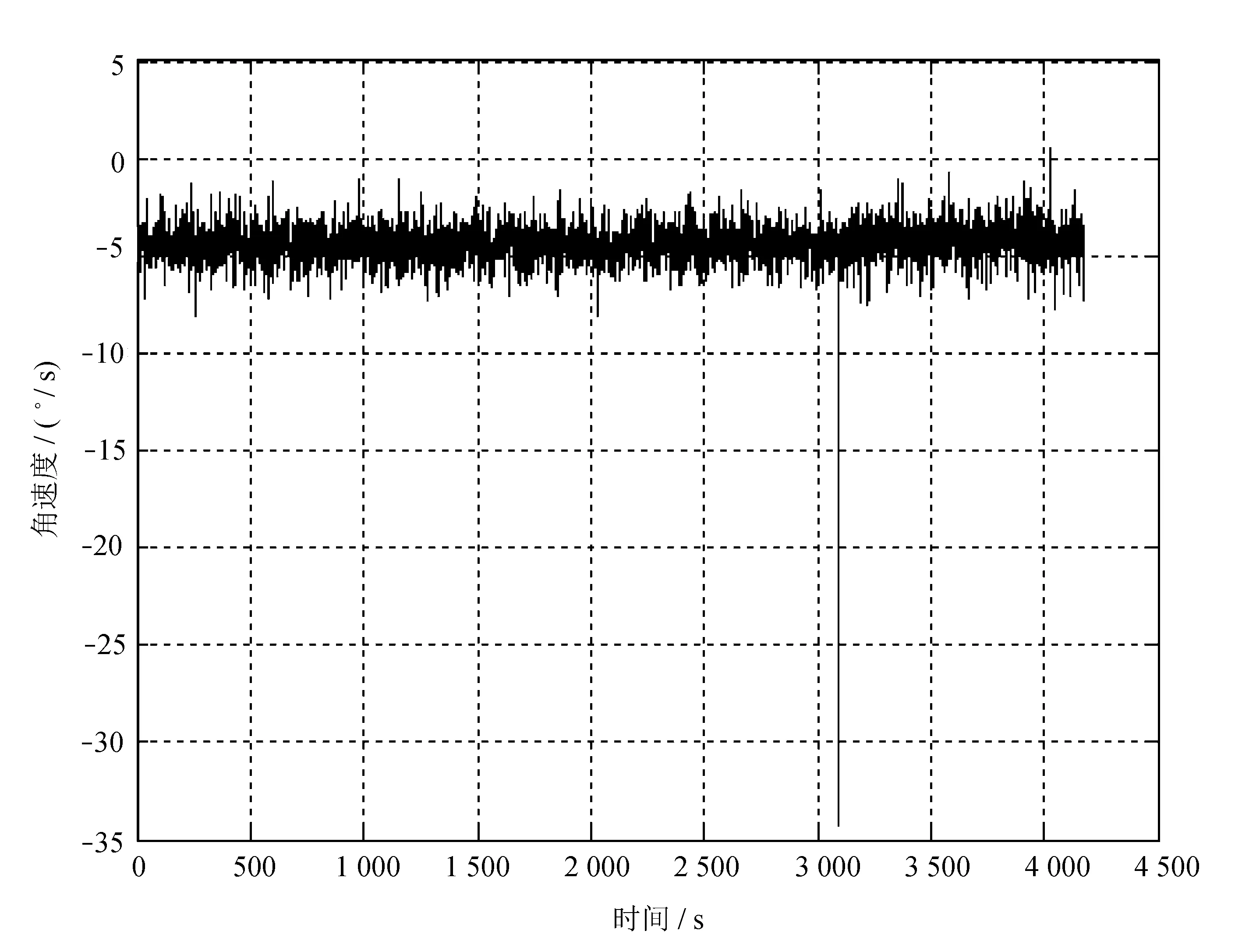
图9 陀螺仪在z轴的角速度分量
理论上,陀螺仪在静止时角速度应该为零,但从图7~图9中却可以看出,3个轴上的角速度都和零值有一定的偏差,这是由于传感器的零偏造成的。零偏是指输入信号为零,输出信号不为零的情况。零偏的原因很多,陀螺仪零偏主要是噪音的影响,在实际运用中,应用求出的数值减去零偏得到实际结果。零偏通常难以避免,质量越好的陀螺仪加速度计零偏相对更小。
从图7~图9中可以看出,陀螺仪虽然存在零偏,但零偏较小,且数值稳定在一定范围内,因此陀螺仪可以正常使用。
2.4加速度计测试
参考MPU6050的数据手册[7],其中加速度计的参数如图10所示。
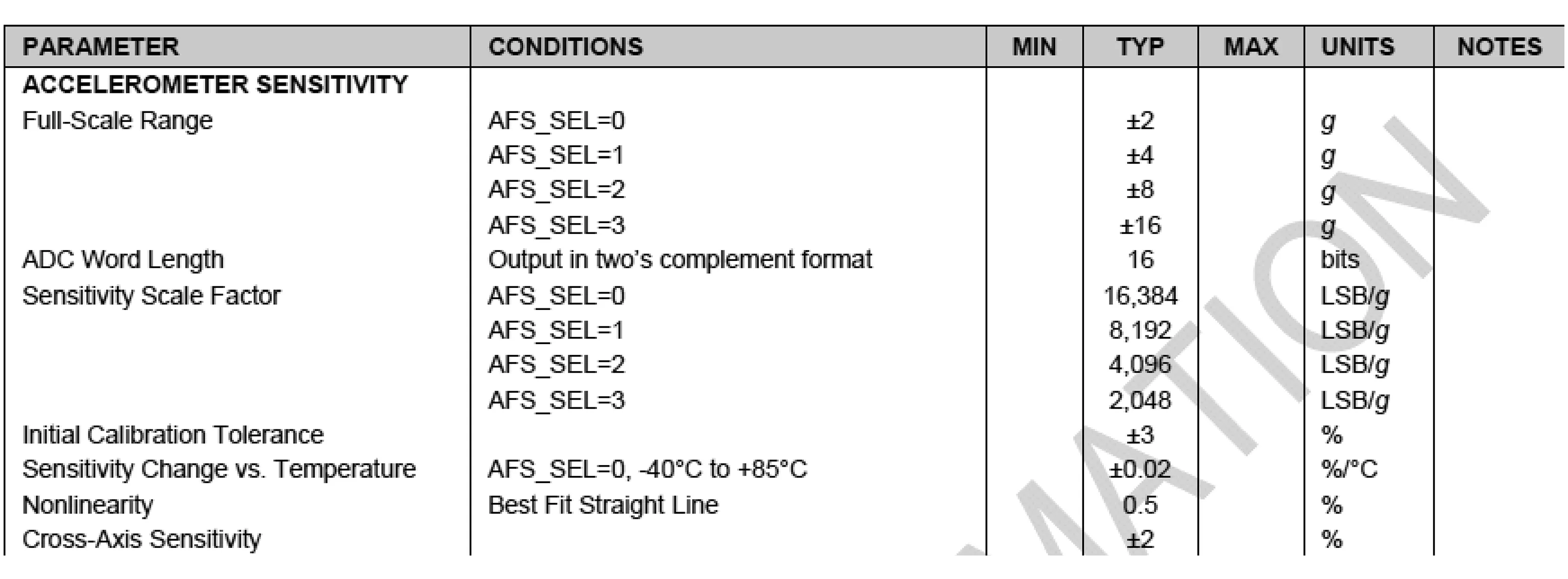
图10MPU6050数据手册中加速度计相关参数
MPU 6050加速度计量程亦可以选择,通过设置寄存器来改变量程,例如设置FS_SEL寄存器值为0,其量程为±2g;设置FS_SEL寄存器值为1,其量程为±4g;设置FS_SEL寄存器值为2,其量程为±8g;设置FS_SEL寄存器值为3,其量程为±16g。
从传感器中直接读取的数据为原始数据,和陀螺仪一样,将原始数据转化为真实的转速需要用到标度因子(见图10)。当选择量程为±2g时,标度因子为16 384,将原始数据除以16.384即可得到真实的加速度(单位为一个重力加速度g);同理当选择的量程为±4g时,标度因子为8 192,当量程为±8g时,标度因子为4 096,量程为±16g时,标度因子为2 048。
在此,选择的加速度计量程为±8g,3轴的真实输出值分别如图11~图13所示。
理论上,静止平放的加速度计的x轴和y轴的加速度值为零,在z轴的加速度值为1g。但从图11~图13中却可以看出,x轴和y轴的值均不为零,z轴的值也不为1。造成这种情况的原因有两个,一是传感器存在零偏;二是由于电路板在测试期间的放置并不能做到完全水平。从图中还可以看出,加速度计的数值变化仍稳定在一定范围内,所以加速度计可以正常使用。
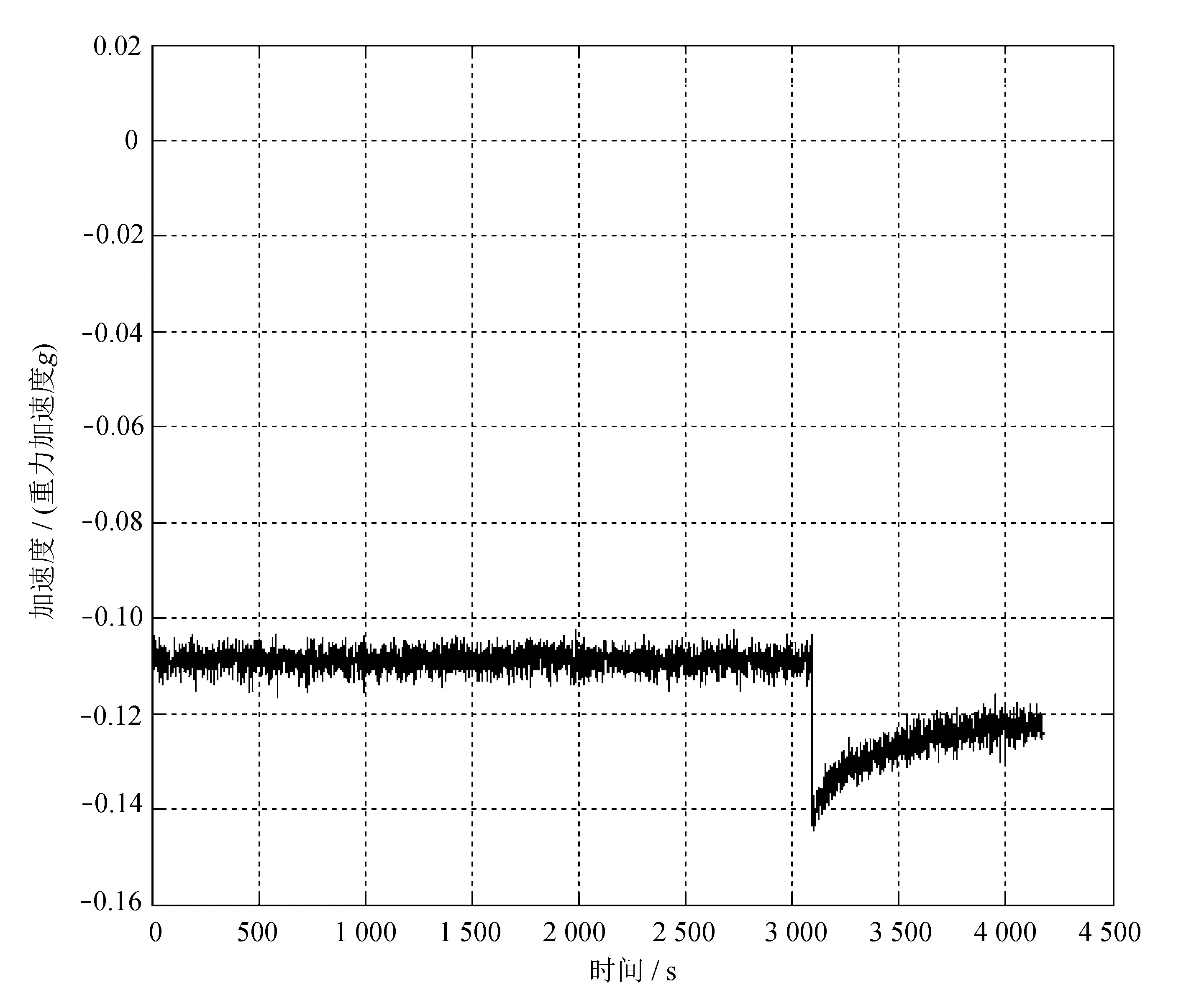
图11加速度计在x轴的加速度分量
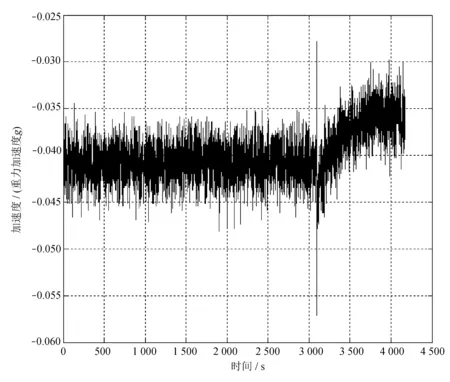
图12 加速度计在y轴的加速度分量
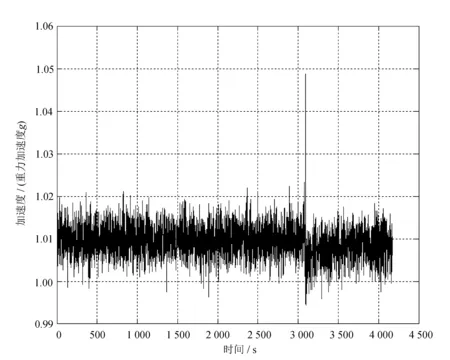
图13 加速度计在z轴的加速度分量
从图7~图13中可以看出,陀螺仪、加速度计的传感在同一时刻发生了变化,这是由于在读数过程中对电路板进行了移动。这一现象说明陀螺仪、加速度计反应灵敏,工作正常,可以放心使用。
2.5磁航向计的测试
参考磁航向计HMC5883L的增益设置数据手册[8],参数见表1。
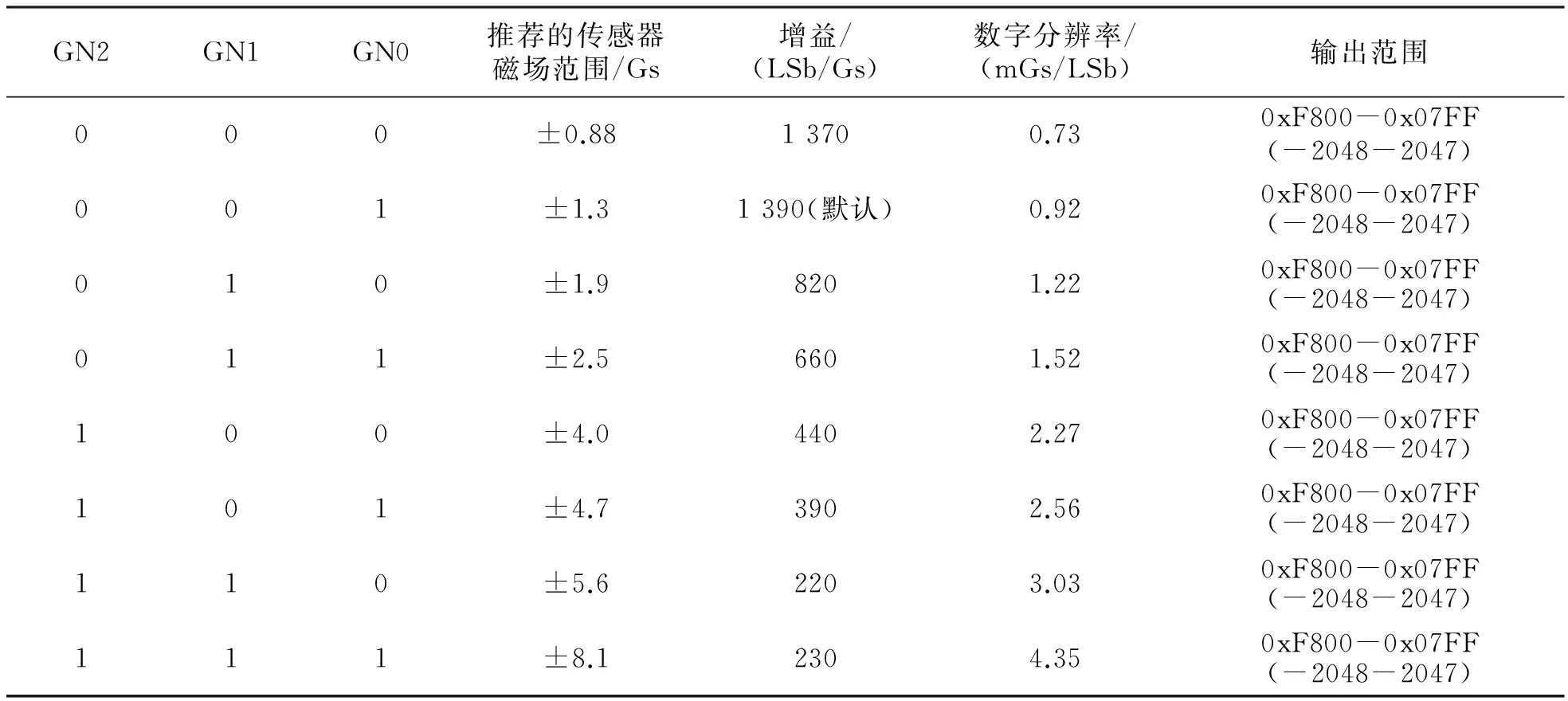
表1 磁航向计HMC5883L的增益设置
磁航向计HMC5883L的增益可以选择,通过配置寄存器B来改变增益,配置磁航向计增益的位置为CRB7、CRB6、CRB5,其名称分别为GN2、GN1、GN0,寄存器B中的其它5个位置CRB4至CRB0都必须清除(也就是配置为0)以保证正确运行。通过配置GN2、GN1、GN0的电位高低(为1或0)来改变增益。例如当GN2、GN1、GN0都配置为低电位(数值用0表示),增益为1 370 LSb/Gs 。
从传感器中直接读取的数据为原始数据,将原始数据转化为真实的转速需要用到另一个参数,即数字分辨率,以图14第一行为例,当选择增量为1 370时,数字分辨率为0.73,将原始数据乘以0.73即可得到真实的磁感应强度(mGs)。
文中选用的增量为390,数字分辨率为2.56,在Matlab中运行如下程序:
>>load sinnovib.TXT
>>a1=sinnovib(:,7);b1=sinnovib(:,8);c1=sinnovib(:,9);
>>a2=a1*2.56;b2=b1*2.56;c2=c1*2.56;
>>Acc=sqrt(a2.^2+b2.^2+c2.^2);
>>plot(Acc);legend('磁航向计测得磁感应强度');xlabel('时间');ylabel('磁感应强度');grid on
得到的地磁量线性图如图14所示。
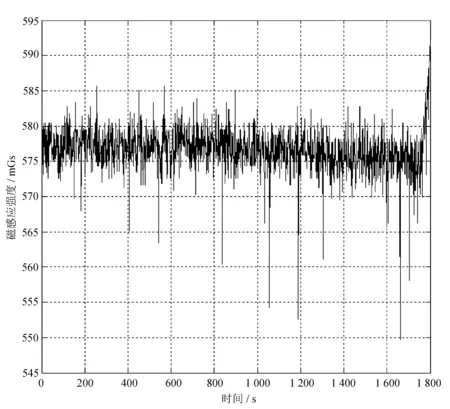
图14磁航向计测得的地磁量线性图
从理论上讲,磁航向计测量的磁感应强度,应与地磁相同,查资料知,地球表面的磁感应强度为0.5~0.6 Gs 。磁航向计测得的磁感应强度(见图14)大部分在570~580 mGs 之间,符合地磁范围,因此磁航向计工作正常。
3结语
首先对硬件方案进行了介绍,然后对所设计的硬件进行测试。分别从陀螺仪、加速度计和磁航向计三大硬件模块进行测试,结果均显示所设计的硬件模块工作正常,可以放心使用。
参考文献:
[1]蒋庆仙.关于MEMS惯性传感器的发展及在组合导航中的应用前景[J].测绘通报,2006(9):5-8.
[2]秦曾煌.电工学[M].6版.北京:高等教育出版社,2011.
[3]InvenSense Inc. MPU-6000 and MPU-6050 Product Specification Revision 3.2.pdf[EB/OL]. [2016-03-15].http://www.invensense.com/.
[4][佚名].HMC5883磁力计数据手册[EB/OL].[2016-03-15].http://wenku.baidu.com/view/0c29277e1711cc7931b71643.html.
[5]解析STM32的库函数[EB/OL].(2012-02-14)[2016-03-15]. http://wenku.baidu.com/view/97ac233731126edb6f1a10ac.html.
[6]杜小菁,李蒙,李怀建,等.一种用于低成本小型无人机的姿态航向参考系统:中国,CN201110072606.2[P/OL].(2012-09-26)[2016-03-15].http://www.soopat.com/Patent/201110072606?lx=FMSQ.
[7]宋英麟,鲜斌,茹滨超,等.无人机微型姿态航向系统数据处理[J].中南大学学报:自然科学版, 2013,44(S2):89-93.
[8]张谦,裴海龙,罗沛.基于MEMS器件的姿态航向参考系统设计及应用[J].计算机工程与设计,2007,28(3):631-634.
UAV attitude heading reference hardware system
DAI Jun,WANG Xiaolu,REN Shuhong
(Zhengzhou University of Aeronautics, Zhengzhou 450001, China)
Abstract:First the hardware system is designed for the attitude heading reference system which includes microcontroller STM32F103, gyroscope accelerometer MPU6050 and magnetic heading meter HMC5883, and then it is tested to ensure the reliability.
Key words:attitude heading reference system; gyroscope; accelerometer; magnetic headingl.
收稿日期:2016-03-15
基金项目:河南省科技厅基金资助项目(162102210237); 航空科学基金资助项目(2014ZA55001); 河南省教育厅基金资助项目(15A590001)
作者简介:代君(1987-),女,汉族,河南邓州人,郑州航空工业管理学院助教,硕士,主要从事卫星导航、无人机控制方向研究,E-mail:daijun502@163.com.
DOI:10.15923/j.cnki.cn22-1382/t.2016.3.11
中图分类号:V 249.122
文献标志码:A
文章编号:1674-1374(2016)03-0261-08
猜你喜欢
中国农业信息(2021年4期)2021-12-21 07:23:50
中国特种设备安全(2021年5期)2021-11-06 05:09:08
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
中国惯性技术学报(2019年1期)2019-05-21 00:58:30
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
山东工业技术(2016年15期)2016-12-01 05:32:01
光学精密工程(2016年5期)2016-11-07 09:06:41
系统工程与电子技术(2016年7期)2016-08-21 13:59:14