电动客车转向摇臂校核方法研究
2016-07-18 11:46:49孟庆石肖俊涛李敏洪安阳孟庆川
汽车零部件 2016年6期
孟庆石,肖俊涛,李敏,洪安阳,孟庆川
(1.湖北汽车工业学院经济管理学院,湖北十堰 442000;2.东莞中汽宏远汽车有限公司,广东东莞 523000)
电动客车转向摇臂校核方法研究
孟庆石1,肖俊涛1,李敏2,洪安阳2,孟庆川2
(1.湖北汽车工业学院经济管理学院,湖北十堰 442000;2.东莞中汽宏远汽车有限公司,广东东莞 523000)
以某公司车型KMT6860转向系统开发设计为例,介绍一种通过对转向系统各参数进行图形化处理,直观求解出转向摇臂长度的方法。在摇臂选型完成后,亦可通过该方法反推出转向摇臂初始角度。
转向系统;摇臂;设计校核
0 引言
快速的市场反应,复杂多样的配置要求,使得客车技术工作具有周期短、要求高、任务重的特点。客车转向系统设计的好坏,将直接影响着司机的驾驶感受。在转向系统设计中,传统的校核方法效率较低,文中以某公司纯电动客车KMT6860为例,阐述一种快捷的转向摇臂选型方法,以满足技术工作平台化、模块化、通用化的发展趋势[1]。
1 转向摇臂长度确定
1.1 转向系统各参数
该车型方向机型号为:SB9072M-TQ(杭州世宝),摇臂摆角:±48°,总圈数:5。
前桥选用东风德纳4.2T,前桥倾角:4.5°,其他参数见表1。
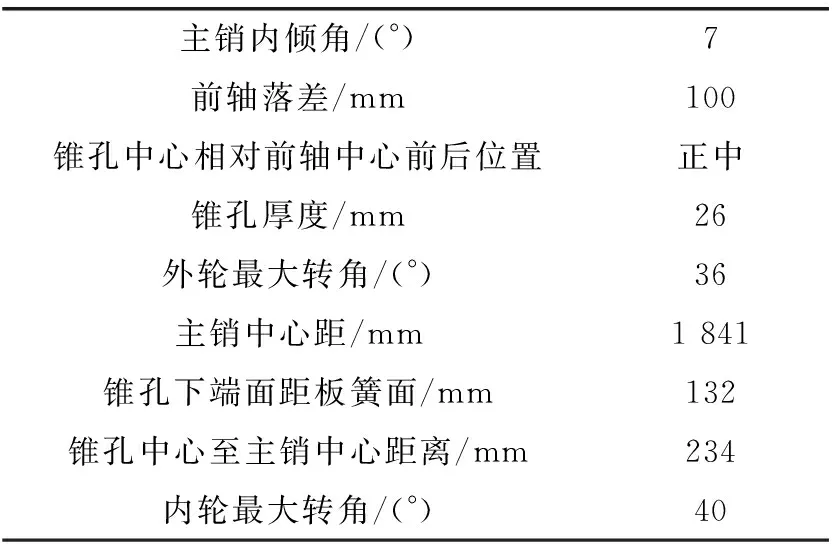
表1 前桥参数
直拉杆球头选用免维护式球座,球头中心到锁紧面距离55 mm。
1.2 作图确定转向摇臂长度
1.2.1 方法理论阐述
(1)转向功能的实现,可以简化看成转向摇臂放大方向机的摆动,通过直拉杆传递到转向节臂,带动前轮转动的一个过程[2]。转向过程中,由于前桥倾角的存在,转向节臂在整车X、Y、Z方向均有相对运动,但Y、Z方向的运动较为复杂,且其运动所带来的影响可以通过直拉杆球头自身可调的特点抵销[3],对转向系统影响较小,作图时可将转向过程中转向节臂在底盘X方向距离的变化量与转向摇臂X方向距离变动量视作相同,即转向摇臂工作时在X方向极限位置位移与车轮最大内、外转角时转向节臂位移量相同(第1.2.2节、第1.2.3节的作图依据)。
(2)由于转向系统设计需保证方向盘从中心位置至左右转向极限位置所转动的圈数一致(从转向摇臂的角度来看,设计时需保证转向摇臂从初始位置至摇臂前后极限位置所转动的转角相同),所以转向摇臂的初始位置必须在整个转向过程的中心位置。而车轮外轮最大转角和内轮最大转角不同(分别为36°、40°),且前桥转向节臂球头安装孔位置一般为偏前10~20 mm,所以需调整摇臂的初始转角,实现上述左右转向时方向盘圈数相同的目标(转向摇臂初始角度的作图原理)。
1.2.2 转向节臂轨迹确定
(1)如图1所示,根据协议校核前桥图纸相关尺寸,保证各尺寸按1∶1绘制。
(2)将转向球头模型装配于转向节臂锥孔中;
(3)从球头中心A作AB垂直转向主销轴线OZ,垂足为B;
(3)作A、B俯视投影线,交前桥轴线于A1、B1;
(5)以B1为圆心,A1B1为半径作圆。根据前桥参数在该圆上作出转向节臂在最大内、外转角位置,分别记作C、D;
(6)过A1、C、D作直线垂直于垂线Z0,垂足记E、F、G[4]。
1.2.3 转向摇臂最短长度确定
(1)将线段FG按前桥倾角旋转,E、F、G旋转后分别记作E1、F1、G1;
(2)过E1、F1、G1作垂线,交水平线于E2、F2、G2;
(3)过F2、G2,以1/2F2G2为半径作圆,圆心记作O1。过圆心O1作垂线,交该圆上方于H;
(4)根据转向器厂家设计要求,摇臂摆角最大设计值为±45°,所以以H为圆心,F2H为半径作圆(该圆同时过F2、G2两点),该圆半径F2H即为转向摇臂最短长度,见图2。

图2 转向摇臂最短长度确定
2 转向摇臂选型校核
通过上述作图,得该车转向摇臂最短长度为202.7 mm,行业内与此长度接近且使用较多的为210 mm的摇臂,故为该车选用210 mm摇臂,并通过图3所示的作图方法,校核此摇臂的适配性能。
(1)以H为圆心,作半径为210 mm的圆1,分别交F1F2、HO1、E1E2、G1G2延长线于I、J、E3、K,连接HI、HJ、HK,量得角∠IHK,算出此车转向总圈数。此车∠IHK为85°,算得转向总圈数为4.47圈,符合设计要求(方向盘的总转动圈数须大于4圈,且不宜超过6圈[5]),如不符合需重新选取摇臂长度,再次校核;
(2)将HI、HJ、HK以H为基点,HJ为参照线,将点J旋转至点E3;
(3)以点J为圆心,JK为半径作圆2,交G1G2于点L;
(4)将HI、HJ、HK以J为基点,JK为参照线,将点K旋转至点L,此时所得的HJ倾角θ,即为转向摇臂的初始角度。测得此车转向摇臂的初始角度为6°。
3 小结
该方法作图所得到的长度,只是转向摇臂竖直方向大、小端装配锥孔的中心距离。因直摇臂有加工容易、受力条件好、加工尺寸准确等优点[6],所以在转向摇臂选型时尽量选用直摇臂。又因摇臂大端与方向机配合的花键齿数一般为定值(36齿或44齿),装配时无法实现设计的理论初始角度,须按就近原则,选取与理论初始角度偏差较小的偏转齿数进行装配。
此方法提高了转向系统的设计效率,改变了传统作图通过反复改变拉杆长度、调整摇臂的位置及长度的方法完成转向摇臂选型的现状,大大缩短了转向系统的设计周期,现已在该司多款车型开发过程中得以应用。文中旨在提供一种设计校核思路,该方法同样适用于转向器其他布置形式。
【1】林银聚.客车底盘平台化技术[J].客车技术与研究,2014,32(6):31-32.
【2】蔡兴旺.汽车构造与原理(下册)[M].北京:机械工业出版社,2004:199-201.
【3】张小虞.汽车工程手册(设计篇)[M].北京:人民交通出版社,2001:595-597.
【4】陈家瑞.汽车构造[M].2版.北京:机械工业出版社,2007:169-174.
【5】林秉华.最新汽车设计手册[M].黑龙江:黑龙江人民出版社,2005:1387-1388.
【6】刘惟信.汽车设计[M].北京:清华大学出版社,2001:655-657.
Research on Check Method for Steering Rocker Arm of Electric Bus
MENG Qingshi1,XIAO Juntao1,LI Min2,HONG Anyang2,MENG Qingchuan2
(1.College of Economics and Management,Hubei University of Automotive Technology,Shiyan Hubei 442000,China;2.Winnerway Automobile Co.,Ltd,Dongguan Guangdong 523000,China)
Taking the design of the KMT6860 steering system as an example, a method to solve the length of the steering arm by using graphic processing to the various parameters of the steering system was introduced. After the selection of the pitman arm was completed, the initial angle of the pitman arm could be reversed by the method.
Steering system; Pitman arm; Design check
2016-03-24
孟庆石(1988—),男,在职研究生,助理工程师,主要研究方向为客车底盘设计开发。E-mail:mengkens@163.com。
U463.4
A
1674-1986(2016)06-055-03
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04 03:34:44
汽车实用技术(2022年10期)2022-06-09 11:21:26
再生资源与循环经济(2021年7期)2021-04-09 13:22:52
装备机械(2021年1期)2021-04-01 07:48:26
水泥工程(2020年4期)2020-12-18 07:12:12
计量学报(2020年7期)2020-08-07 02:55:36
汽车实用技术(2019年7期)2019-04-18 07:55:52
汽车文摘(2017年4期)2017-12-07 02:41:15
河南工学院学报(2017年1期)2017-06-07 09:00:59
制造技术与机床(2017年12期)2017-02-02 07:05:11