
几种无人机正射影像处理软件的比较
2016-07-15 05:10黎治坤郑史芳黄小川
测绘通报 2016年6期
黎治坤,郑史芳,刘 锐,黄小川
(广东省国土资源测绘院,广东 广州 510000)
几种无人机正射影像处理软件的比较
黎治坤,郑史芳,刘锐,黄小川
(广东省国土资源测绘院,广东 广州 510000)
摘要:为了考察几种主流软件的无人机影像处理能力,本文在同等硬件环境和相同数据的条件下,对PixelGrid、DPGrid、PHOTOMOD、Inpho、IPS生成正射影像图的效率和质量进行了比较,并对比较结果及各软件的特点进行了探讨。
关键词:数字正射影像图(DOM)制作;质量;效率;对比
无人机航摄相对于传统航摄具有环境适应性强、快速机动灵活的优点,在应急救灾、高分辨率影像制作领域有着广阔的应用前景。但由于飞行姿态不稳定、航片角较大、装载非专业数码相机、小像幅小基高、存在像点位移等原因,无人机影像处理对处理软件的处理能力和稳定性具有特殊的要求。目前国内较为常用的无人机影像处理软件主要有:PixelGrid4.0、DPGrid、PHOTOMOD5.3、Inpho5.7、IPS4.0。PixelGrid是中国测绘科学研究院研发的集航空摄影测量、无人机航测、卫星影像遥感及卫星雷达遥感等数据后处理于一体的综合应用系统,主要有如下优点:①多核多线程的影像处理技术,可对批量影像进行畸变纠正、格式转换、旋转翻转、灰度增强等操作;②基于SIFT算法的快速匹配技术,较以往的影像匹配能力有较大的提升;③新版本重写了新的平差算法,较传统的PATB平差有改进。DPGrid是武汉大学遥感信息工程学院研发的航空摄影测量、无人机航测的综合应用平台,主要有如下优点:①空三完成后的DSM、DEM、DOM可以一键式自动化完成,具有良好的互操作性,具备DEM与DOM同步编辑功能;②各种功能可以定制;③与现有立体测图设备及软件结合紧密。PHOTOMOD系列软件产品是俄罗斯Racurs公司的集航空摄影测量、无人机航测、倾斜摄影测量、近景摄影测量、卫星影像遥感及卫星雷达遥感等数据后处理于一体的综合应用系统,主要有如下优点:①软件界面精简,模块化集成度较高;②支持影像畸变改正;③平差模块效率较高。Inpho由德国inpho公司推出,是欧洲最著名的航空摄影测量与遥感处理软件,可以全面系统地处理航测遥感、激光、雷达等数据,主要有如下优点:①高精度的空三加密模块,便捷的空三分区操作;②UASMaster模块是专门针对无人机影像处理的高效模块;③分布式处理与多线程并发运算;④可由DSM直接生成DOM。IPS是卡洛斯公司的推出的全数字摄影测量工作站系统,它能够快速、 准确地处理航拍图像数据,主要有如下优点:①高效率的空三加密模块,支持超大数据量的区域网平差;②强大的匀色模块,在无参考影像的情况下能将两张差别很大的影像匀色成一致;③一键式自动化的流程处理,即设置完工程后可以一键式得到最终的数字正射影像图。本文以相同范围内的无人机影像为对象,对软件的主要性能尤其是影像质量和处理效率进行考察。
一、总体思路
测试的总体思路是采用相同的硬件平台、数据、标准对软件的执行效率、硬件利用率等进行评测。
1. 硬件平台
鉴于各软件对硬件需求不同,为保证测试效果,充分发挥当前软件的能力,保证各软件对当前主流硬件充分利用的能力,统一采用了同一个高性能硬件平台,硬件平台的具体参数见表1。
2. 数据情况
从标准流程和应急出图两个方面考虑,测试选取2个数据区域:一为广东某岛全域,用来测试常规数字正射影像生产;另一块为汕头市应急区洪灾应急影像数据,用来测试软件的应急快速处理能力。数据区域概况见表2。
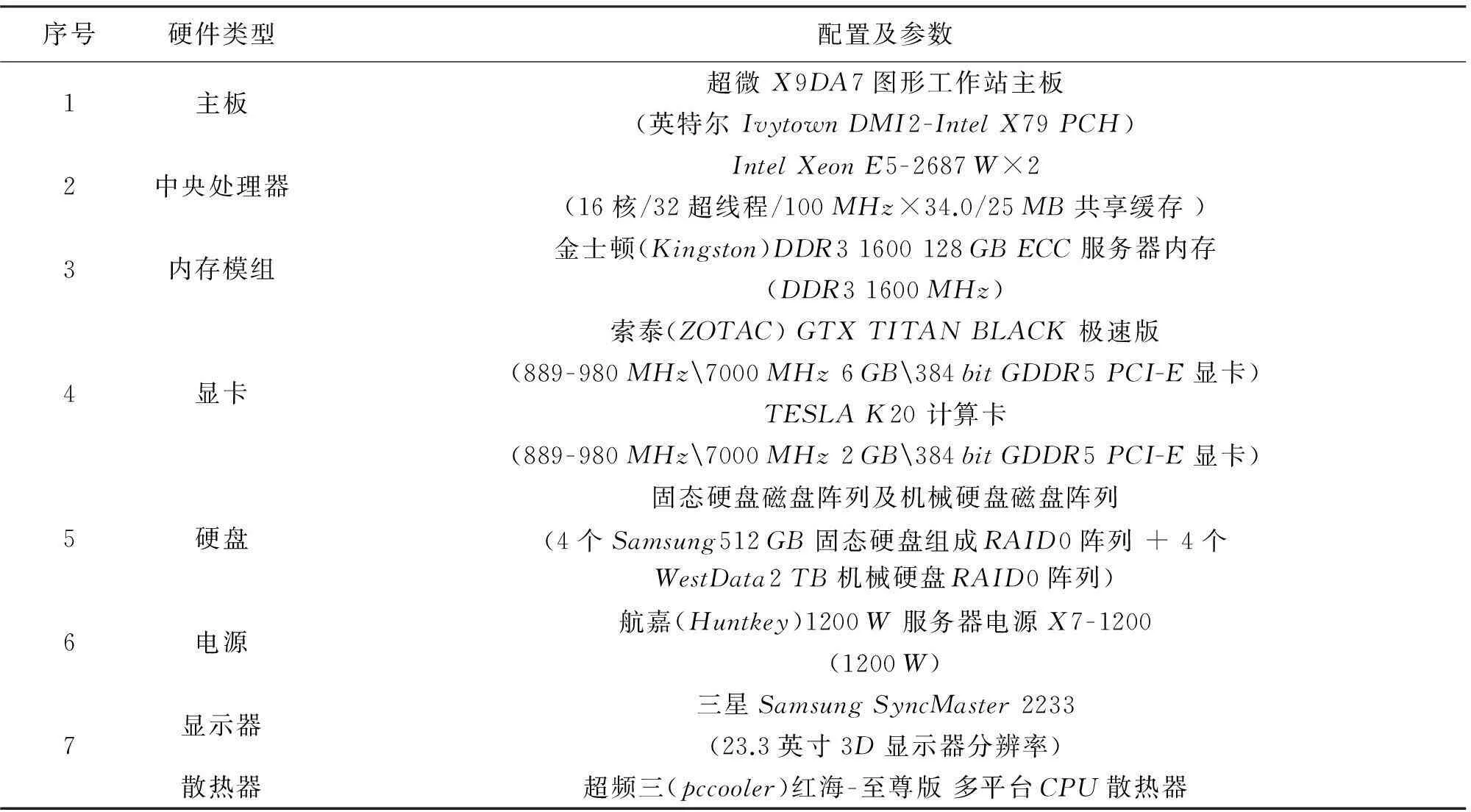
表1 测试平台硬件

表2 数据区域概况图
3. 对比指标
根据前期设计,测试的主要指标设计叙述如下。
数据准备阶段:主要测试数据准备的简易性,是否必须进行影像畸变改正。
空三测量阶段:主要测试影像匹配的速度和精度,绝对定向操作的速度和精度,空三成果的精度。
正射镶嵌阶段:主要测试DSM、DEM的速度和精度,DOM镶嵌成图及编辑的速度和精度。
二、对比流程
摄影测量的一般流程由数据准备、空三测量和正射镶嵌3大部分组成。其中,数据准备包括相机文件、POS文件的编辑,影像畸变等操作。空三测量包括影像匹配、绝对定向、测量平差、成果输出等几个步骤,而影像匹配是主要的评价指标,对数据处理的精度和效率有着直接的影响。对自动匹配生成的DSM进行滤波操作可以得到正射纠正需要的DEM,但是局部(主要是居民地密集区)仍需要交互编辑。DEM的交互编辑关系到作业效率和成果的精度。利用DEM进行单张像片的正射纠正,然后进行镶嵌操作将单张像片拼接成大幅正射影像成果。
根据前期设计,主要的数据处理流程如图1所示。
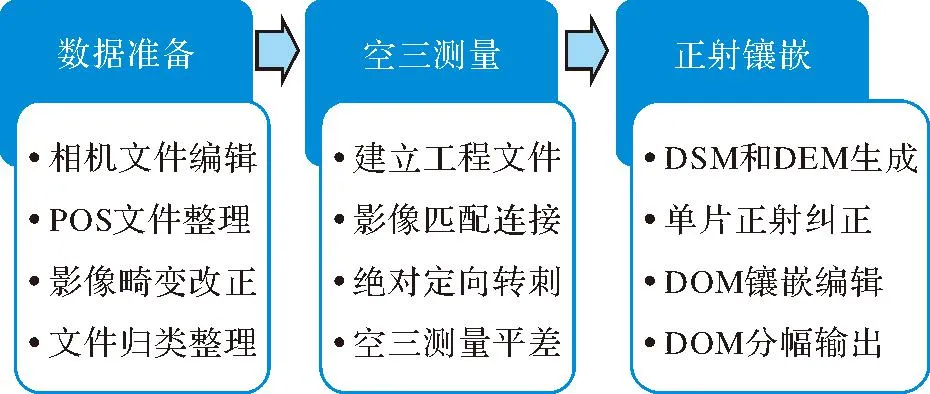
图1 数据处理流程示意图
依软件设计的不同,以上子过程顺序可能会不同,也可能综合处理,但总体流程是一致的。以下为几个软件的具体测试流程。
PixelGrid和DPGrid两个软件在使用方法和接口方面有很多相似和互通之处,PixelGrid则在无人机空三算法方面有着较高的效率,DPrid则在数据后处理方面有非常好的交互性,两个软件的相互配合使用可以最大限度地提高效率,本次比较中PixelGrid和DPGrid作为一个整体进行数据测试。具体细节如下:①利用PixelGrid对航空影像数据进行匹配,内业先进行初步分区和自由网平差,并据此进行像控设计;②按照像控设计结果,进行像控点外业选刺、观测、计算和资料整理;③内业在自由网平差基础上,加入像片控制测量成果进行空中三角测量的区域网平差并输出空中三角测量最终成果;④根据空中三角测量最终成果使用DPGrid进行后续处理,生成并编辑DEM、DOM。这个版本的PixelGrid采用的是多线程匹配,单线程空三转点,处理慢而且单区匹配片数不能过大,导致最后测试区分区过多,
接边工作量太大,整体效率和色调一般。
PHOTOMOD将数据划分为3个工程区域,在本测试中,将数据处理过程分为以下5部分:①根据项目数据和软件特点构建3个测区;②利用多线程和GPU辅助加速对测区影像进行匹配,添加控制点,平差;③点云提取、滤波、生成DEM;④利用GPU加速对单张航片进行正射纠正;⑤利用GPU加速对影像进行拼接、匀光匀色,并划分片区出图。这个版本的PHOTOMOD采用了CPU+GPU辅助加速的匹配方式,在空三匹配、正射纠正及镶嵌成图速度上有了较大的提高,然而这个版本GPU作为辅助作用未全部参与整个空三运算和后期影像的纠正,在速度上还有提升的空间。另外,该版本软件平差算法容易出现运算迭代循环,平差错误不容易剔除。
Inpho将数据划分为一个整区,采用虚拟子区匹配、分区合并的方式,在软件匹配上成功率上有较大优势。另外INPHO采用的是根据影像颜色分布可以进行人工调整进行,成图效果是对比软件中效果最好的,更接近真实色彩。然而该版本Inpho所有模块不支持超过16线程运算,匹配效率不高,UAVMaster模块单次不支持超过6000张影像同时处理,每张影像不能超过4000万像素,ApplicationsMaster模块对于初始POS精度依赖较为明显,对于大面积低纹理水域匹配效果不佳,对于高差太大地区存在匹配效果较差等不足。
IPS将数据划分为一个整区,利用CPU+GPU硬件全加速对整区进行匹配。在本次对比中,空三匹配过程中最大限度利用硬件性能,成图速度也最快, 然而IPS在DEM后编辑方面存在不足,无法实现对于滤波效果不好的地区进行实时编辑,同时IPS后处理与其他软件对接尚不够完善,有待加强。数据效率和精度统计结果的具体情况见表3、表4。
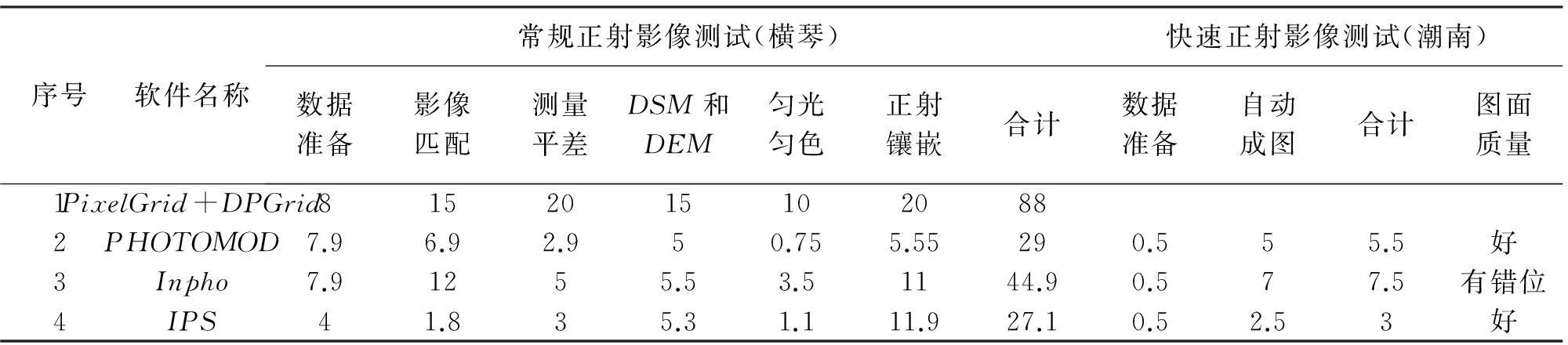
表3 效率统计表 h
三、分析与比较
根据工作流程,从以下几个方面对各软件进行了横向对比和评价。
1. 软件功能及流程设计对比
软件设计对航空摄影流程理解的全面性体现在软件界面上,即流程是否清晰、功能是否完备、容错能力存在与否。
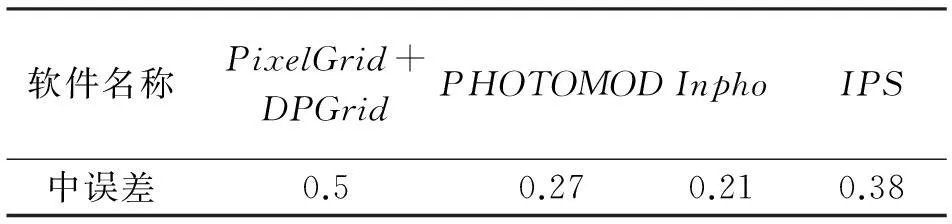
表4 精度统计表 m
注:中误差统计采用野外实测的控制点为基准。
2. 资源使用和处理效率对比
软件对硬件资源的利用主要体现在CPU、内存、显卡GPU的利用率上,在单位时间内对其利用率越高,处理效率也越高。
数据处理效率包括数据准备的效率、空三处理效率、正射镶嵌的效率(DSM/DEM、DOM编辑等)。
3. 测绘成果精度对比
利用实测的野外控制点对各软件制作的数字正射影像图进行检测,并统计点位中误差。
4. 成果的完整性对比
是否能够得到完整的成果,是否能输出需要的精度报告等附加文件。横向对比的结果见表5。
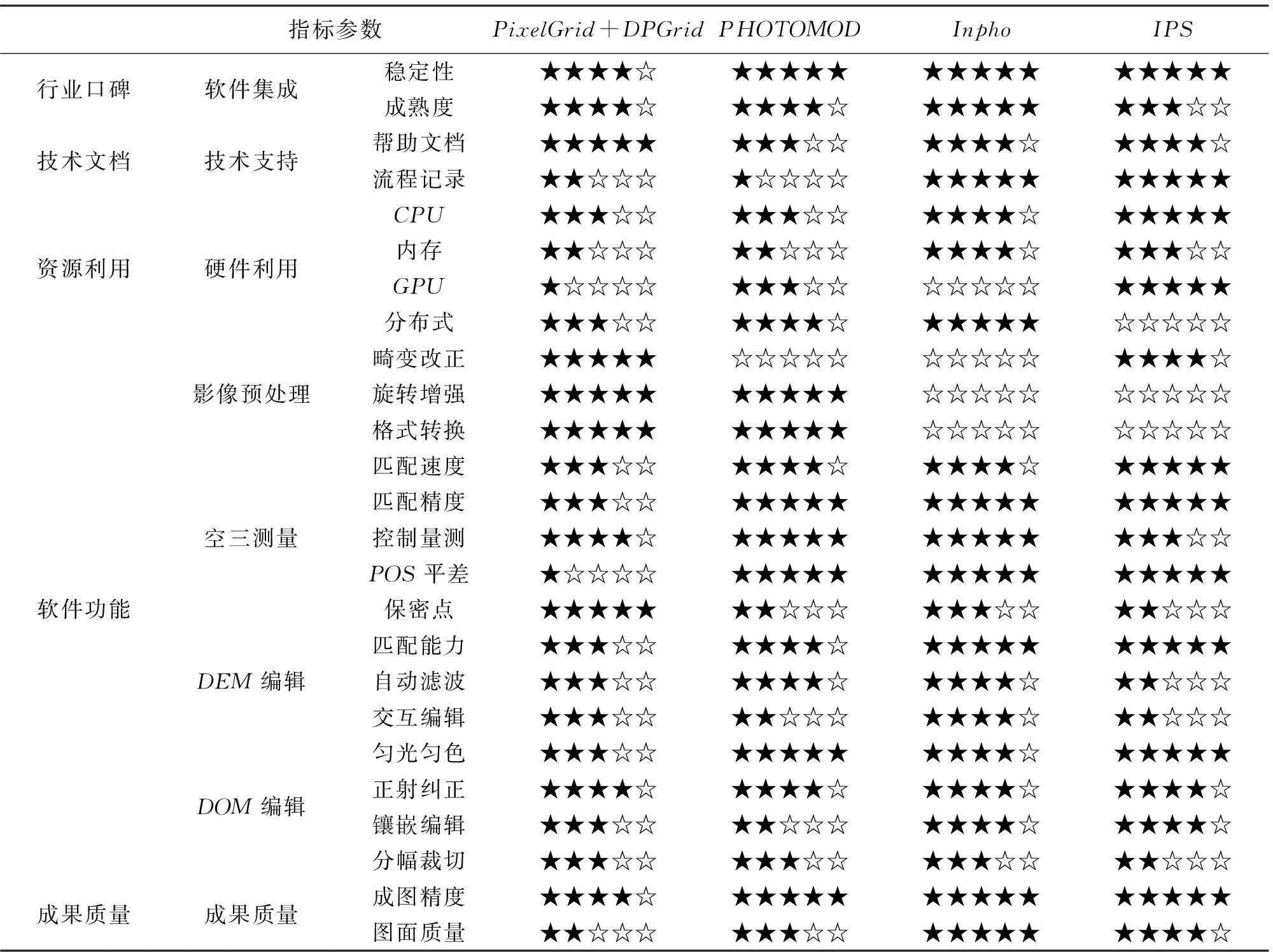
表5 性能横向比较表
四、结论
通过实际测试可以得出以下结论:
1) 从成图精度来看所有参与评测的5款软件都能满足1∶2000正射影像成图要求,横向比较Inpho的匹配点位更可靠,精度及可靠性更高。
2) 从成图效率来看,IPS总体效率最高,能够快速生成正射影像图。
3) 图面质量:Inpho>PHOTOMOD>IPS>DPGrid>PixelGrid。
4) 成图效率:IPS>Inpho>PHOTOMOD>PixelGrid>DPGrid。
5) 友好易用:IPS>Inpho>PixelGrid>PHOTOMOD>DPGrid。
6) 资源利用:IPS>PHOTOMOD>Inpho>PixelGrid>DPGrid。
7) 成果交互:DPGrid>PixelGrid>Inpho>PHOTOMOD>IPS。
参考文献:
[1]解斐斐,林宗坚,王东东.UAV城市高质量DOM制作流程与方法探讨[J].测绘通报,2011(5):41-44.
[2]张祖勋,张剑清.数字摄影测量学[M].2版.武汉:武汉大学出版社,2012.
[3]林跃春,王睿.浅谈数字正射影像的制作技巧与心得[J].测绘与空间地理信息,2011(1):109-111.
[4]周利利,王崇倡,王涛.DOM制作过程中存在若干问题的处理方法[J].安徽建筑工业学院学报(自然科学版),2011,19(5):19-22.
[5]王建梅,朱紫阳.利用已有像控点的多期航空影像光束法区域网联合平差[J].测绘学报,2010,39(1):22-27.
[6]宫阿都,何孝莹,雷添杰,等.无控制点数据的人机影像快速处理[J].地球信息科学学报,2010,12(2):254-260.
[7]张书煌.数字正射影像图的质量控制与评价方法[J].福建地质,2007(1):40-46.
[8]黄欣.数字地面模型(DEM)和正射影像(DOM)的设计与实施[J].北京测绘,2007(2):40-43.
[9]方辉.数字正射影像图生产工艺流程及质量控制[J].城市勘测,2007(3):70-72.
[10]方剑强.生产数字正射影像图(DOM)的若干技术问题探讨[J].测绘与空间地理信息,2007(3):91-93.
[11]SALIMHA,陈晓玲,江万寿,等.基于Photomod3.11制作数字正射影像[J]. 测绘信息与工程,2007(5):27-29.
[12]官云兰,周世健,鲁铁定.基于ERDASIMAGINE的数字正射影像图的制作[J].测绘通报,2005(12):31-33.
[13]王祥,黄健.数字正射影像图的原理及生产流程[J].现代测绘,2000(1):33-35.
[14]段彩霞,于盛妍.高质量数字正射影像图的制作探讨[J].城市建设理论研究,2015(19):32-35.
[15]王珏,陈映鹰.数字正射影像地图的生成及进一步开发利用[J].遥感信息,2001(2):31-34.
Comparison of Several Kinds of Image Processing Software for UnmannedAerialVehicle
LI Zhikun,ZHENG Shifang,LIU Rui,HUANG Xiaochuan
收稿日期:2016-03-15
作者简介:黎治坤(1982—),男,工程师,主要从事工程测量、摄影测量与遥感、测绘航空摄影测量及倾斜摄影测量技术方面的研究工作。E-mail:273126148@qq.com
中图分类号:P23
文献标识码:B
文章编号:0494-0911(2016)06-0082-05
引文格式: 黎治坤,郑史芳,刘锐,等. 几种无人机正射影像处理软件的比较[J].测绘通报,2016(6):82-86.DOI:10.13474/j.cnki.11-2246.2016.0196.
猜你喜欢
甘肃教育(2020年14期)2020-09-11
电脑知识与技术(2016年25期)2016-11-16
计算机教育(2016年7期)2016-11-10
企业导报(2016年19期)2016-11-05
电影文学(2016年16期)2016-10-22
时代英语·高二(2015年1期)2015-03-16
中国卫生(2014年11期)2014-11-12
体育师友(2011年2期)2011-03-20
