
线阵CCD卫星影像DSM自动生成技术
2016-07-15 05:08:33王李娟孙华生
测绘通报 2016年6期
宋 冰,林 卉,丁 翠,王李娟,孙华生
(1. 中国矿业大学环境与测绘学院,江苏 徐州 221116; 2. 江苏师范大学测绘学院,江苏 徐州 221116; 3. 山东城市建设职业学院,山东 济南 250103; 4. 辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
线阵CCD卫星影像DSM自动生成技术
宋冰1,林卉2,丁翠3,王李娟2,孙华生4
(1. 中国矿业大学环境与测绘学院,江苏 徐州 221116; 2. 江苏师范大学测绘学院,江苏 徐州 221116; 3. 山东城市建设职业学院,山东 济南 250103; 4. 辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
摘要:线阵CCD传感器成为了对地观测最有效的方式之一,本文研究了线阵CCD影像构成的立体像对密集匹配自动生成DSM的方法与关键技术,提出了基于核线影像的金字塔逐层匹配方法及基于相关系数的动态窗口变换的双向匹配方法来实现格网点的匹配。通过资源三号卫星影像等数据试验验证了上述理论与方法的适用性和正确性。
关键词:卫星影像;影像金字塔;密集匹配;数字表面模型;有理函数模型
随着遥感技术和相机技术的发展,框幅式相机的垄断地位已被打破,线阵CCD传感器成为了对地观测最有效的方式之一。此外,数字表面模型(DSM)是数字高程模型(DEM)提取、等高线生成、建筑物提取和重建、真正射影像制作和地理信息更新等工作的重要前期数据源。因此,如何基于CCD卫星影像自动提取DSM是当前研究的难点和热点[1-4]。
TAO等开发出世界上第一个能快速从遥感影像上进行三维重建的软件SilverEye,它根据影像自带的RPC文件重建像素坐标和三维大地坐标的几何关系。除此之外,TAO等还研究了基于RPC参数的最小二乘解的求法,根据与地形是否有关提出了两种解算方法,并提出了根据有理函数模型RFM(rational function model)进行地形表面三维重建的具体方法[1]。ZHANG等针对立体影像数据源依据RFM的三维重建方法开发了SAT-PP软件[2]。随着RFM在遥感影像三维重建中日益凸显出重要作用,许多学者进行了相应的RFM的精度分析[3-6]。总体而言,上述研究多集中在三维坐标的解算方法和模型上,对其中的关键技术如影像匹配等方面的研究不够深入。鉴于此,本文研究线阵CCD影像构成的立体像对密集匹配自动生成DSM的方法与关键技术,提出基于核线影像的金字塔逐层匹配方法及基于相关系数的动态窗口变换的双向匹配方法来实现格网点的匹配;并通过资源三号卫星影像等数据试验验证上述理论与方法的适用性和正确性。
一、密集匹配与DSM自动提取
1. 总体技术流程
总体技术流程如图1所示,主要包括影像预处理、密集匹配、三维重建和DSM渲染等步骤,其中最核心的步骤是密集匹配,其准确率直接影响后续三维重建和DSM的渲染。
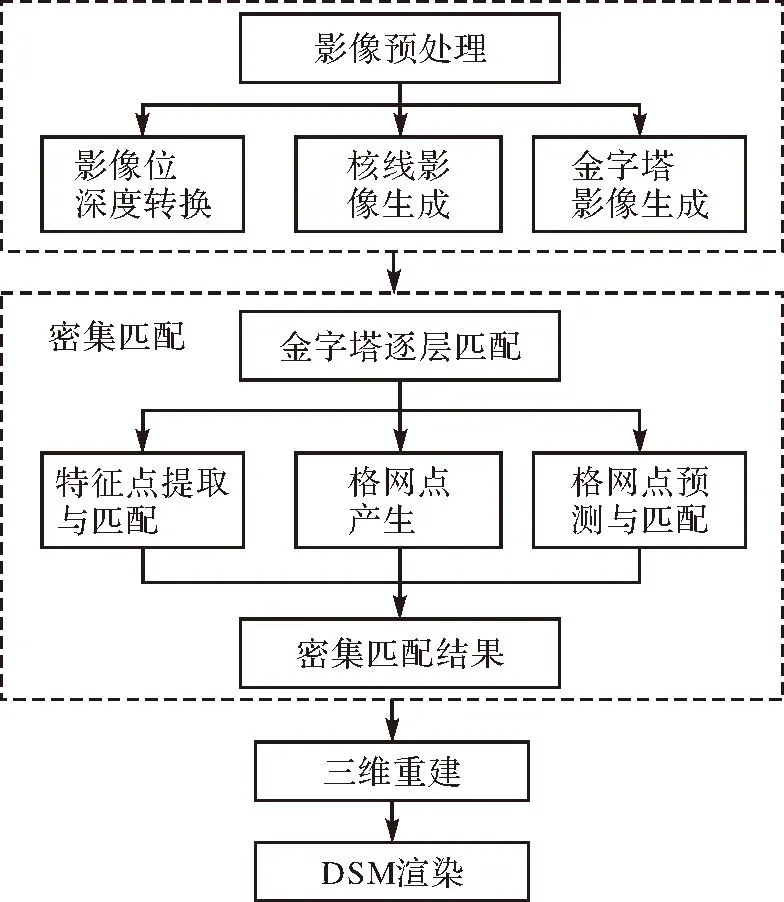
图1 总体技术流程
2. 预处理
(1) 影像位深度转换
位深度用于指定图像中的每个像素可以使用的颜色信息数量,每个像素使用的信息位数越多,可用的颜色就越多,颜色表现就更逼真。资源三号的全色原始影像为16位,在PC机里如果不用专业软件进行位度拉伸就显示为全黑色。为了更直观地显示及后期算法的处理,需对原始影像进行位深度转换,针对全色(单波段)的立体像对,其处理方法是转换为8位的灰度图像。以资源三号全色影像为例,其灰度像素值范围为:0~65 535,据统计其前2%的像素值临界点为45,后2%的像素临界点为457,像素值R按照R×255/(457-45)进行拉伸即可。
(2) 核线影像生成
核线影像是沿着核线方向进行重采样生成的没有上下视差的影像。同名核线对上的点在核线影像上的Y值是相等的,根据这一特点,可将影像匹配中同名点的搜索范围由二维简化为在核线方向的一维,这种做法不仅可以降低匹配搜索的空间和时间,同时又可以提高匹配的准确率。
由于线阵CCD推扫式影像的每一扫描行均有一个中心投影点,遵循“多中心”动态投影的成像方式,很难完全建立像点和物点之间的对应关系,故不能像框幅式单中心投影影像一样具有十分严密的核线几何关系。目前,对线阵CCD影像的各种近似核线几何关系的近似描述中,投影轨迹法的核线理论最为严密,更适合获取线阵CCD卫星影像的核线影像[7]。按此方法生成的核线影像如图2所示。
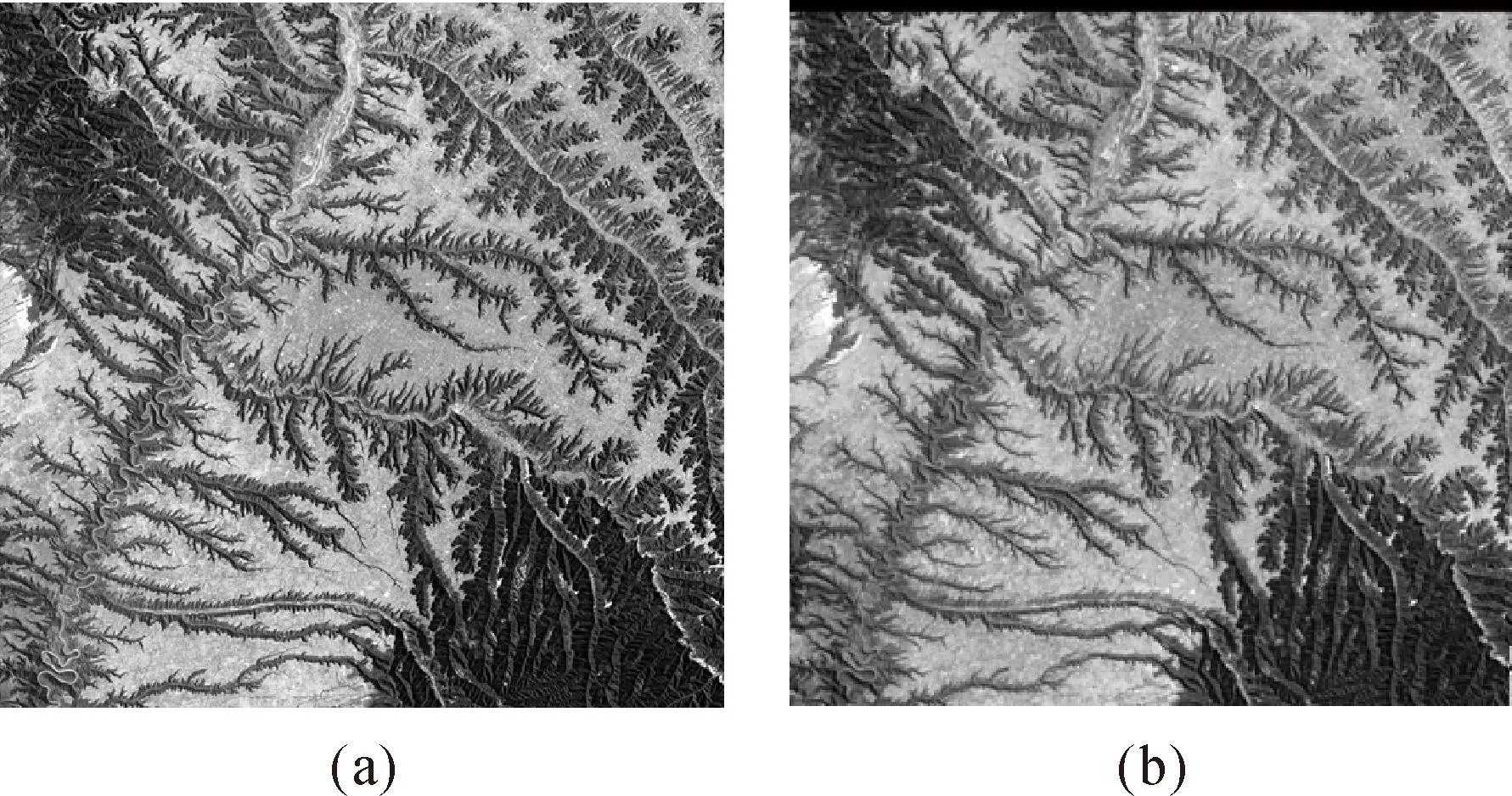
图2 核线影像
(3) 金字塔影像生成
金字塔影像是在原始影像的基础上通过不断产生较下层影像分辨率小(影像尺寸较小)的影像作为上层影像而构成的形似金字塔状的多个影像的组合。金字塔影像的多层匹配策略在密集匹配中有许多优势,在生成金字塔影像时,上层影像较下层影像在保留整体纹理结构的基础上滤掉了噪声和极值点,从而在金字塔顶层上减少了匹配的不确定性。另外,由于金字塔上层影像的尺寸较下层影像小,其相同窗口的影像匹配拉入范围变大,窗口影像内纹理结构明显,更易于灰度匹配。以上一层匹配的结果作为下一层匹配的初始值,从而减少了下层影像匹配的搜索时间,对影像匹配的效率和可靠性都有很大提高[2]。
3. 密集匹配
为研究试验因素交互作用对羊肚菌SDF提取效果的影响,可以通过响应面分析实现。通过Design-Expert 8.0.6软件分析,所得的响应面图见图5~图10。
(1) 特征点提取及匹配
采用基于尺度不变特征变换(scale invariant feature transformation,SIFT)算法进行特征点提取,进而生成特征描述子,然后通过最/次近邻距离比值法NNDR(nearest neighbor distance ratio)进行特征点匹配[8]。最后通过随机抽样一致性(random sample consensus,RANSAC)算法进行误配点剔除,其目的是获取两景影像之间的几何变换模型参数,可用于DSM制作区域在立体像对上重叠区域的获取及后期格网点的预测。
(2) 格网点预测
根据DSM制作区域和DSM的提取精度可确定格网点的范围和间隔,假设格网点间隔为N,则在左影像上的DSM制作区域范围内,以等间隔像素数N在影像的x和y方向上划分格网,其中每个十字交叉点均为格网点。基于上述格网点进行格网点的预测。格网点的预测指的是在右影像上找出左影像上每个格网点的粗略位置用于后期格网点匹配搜索范围的约束。本文中格网点的预测分为两种:一种是金字塔顶层的格网点预测,另一种是金字塔其他层格网点的预测。
金字塔顶层格网点的预测是通过特征点提取与匹配获得两景影像之间的仿射几何变换模型(式(1)),进而以此几何变换模型映射左影像格网点在右影像的位置。

(1)
式中,(x,y)和(x′,y′)为一对同名点,(x′,y′)为经过多项式求解(x,y)对应左影像的匹配点坐标;n为同名点对数量;a、b、c、d、s、t为系数。式中包含了平移、旋转、缩放等变换,不共线的3对对应点决定了唯一一组多项式拟合参数。
由于金字塔顶层影像的分辨率较低,影像尺寸较小,几何畸变也同样很小,只要能保证匹配点的均匀性和正确性即可保证顶层格网点预测的准确性。金字塔其他层格网点的预测是通过金字塔逐层匹配中上层匹配结果向下传递获得,上层匹配点坐标还原至下层坐标后作为本层匹配结果的初值。为了保证每一层格网点密度的同一性,上层匹配点坐标还原至下层时需根据周围匹配点计算出增加的格网点在右影像上同名点的初始值,其在格网点匹配时的搜索步长也相应地放大。图3表示金字塔顶层影像(尺寸为原始影像大小的1/16)DSM制作区域均匀分布点的获取,其中矩形区域为DSM制作区域在立体像对上的对应的区域范围,圆内的十字交叉点为均匀分布的匹配点。图4为立体像对金字塔顶层影像格网点的预测。其中格网间隔为13像素,基于SIFT匹配的结果采用多项式拟合两影像之间的对应关系并映射格网点的匹配初始值。

图3 DSM制作区域均匀分布点的获取

图4 立体像对金字塔顶层影像格网点的预测
格网点的匹配采用基于相关系数的动态窗口变换的双向匹配策略,其中用到相关系数的模板匹配,动态窗口变换和双向匹配。相关系数的模板匹配是以相关系数最大为筛选条件进行的奇数窗口影像灰度匹配。动态窗口变换是在一维匹配的基础上利用影像重采样来减弱几何畸变对灰度匹配影响的一种方法。双向匹配是以左影像为基准影像匹配右影像之后,再以右影像为基准影像对左影像进行搜索匹配下方法,具体过程如下:
1) 以左影像的格网点为基准,取以格网点为中心的奇数窗口影像w×w与以右影像上相应格网点预测值为中心,核线方向上r(像素)范围内,对以其为中心的奇数窗口影像逐个计算相关系数,如其中最大的相关系数大于设定的阈值δ1,则认为这两个点是匹配点。
2) 如果最大相关系数小于阈值δ1而大于设定的阈值δ2,其中δ1>δ2且其值均较大,如δ1=0.8,δ2=0.7,则将右影像上与之相关系数最大的那个点暂定为匹配点,然后以左影像的那个格网点为中心,核线方向上r(像素)范围内,对以其为中心的奇数窗口影像逐个计算相关系数,如果相关系数最大的点仍为最初的那个格网点则认为这两个点是匹配点。
3) 经过上述两个步骤仍没有匹配的点,以右影像匹配点的预测值为中心,垂直于核线方向窗口大小仍为w,核线方向为w+Δ或w-Δ范围内逐次重采样成w×w的窗口影像,然后再重复上述两个步骤进行相关系数的双向匹配来计算左影像格网点的匹配点。
4. 基于有理函数模型的三维重建
经过金字塔的逐层匹配后可获得立体像对的同名点坐标,而最终DSM的渲染是通过格网点的大地三维坐标来进行的,故需要进行类似于传统摄影测量中的立体空间前方交会过程。在利用不同来源的遥感影像进行三维重建时不会受到传感器物理模型和坐标系统的限制,而且RFM模型构建的空间前方交会模型更具一般性,能够广泛地应用于各种遥感影像中[9-10]。本文采用的是RFM+RFM模型,即对左右影像均选用RFM模型作为相应的定位模型,其前提条件是需要立体像对的RPC文件和同名点坐标文件。RPC文件中共有90个参数,其中5个标准化的平移坐标、5个标准化的比例参数和80个有理函数系数。
二、试验
试验选取2012年11月29日获取的陕西铜川地区的资源三号卫星前后视影像数据,经度范围约为:108.43°—109.11°,纬度范围约为:37.43°—35.34°,高程范围约为:495~1800 m。该立体像对的构像方式是同轨的,地面分辨率为3.6 m,其影像大小为16 306×16 306像素,该影像覆盖面积为50 km×50 km。
根据投影轨迹法生成核线影像,采用SIFT算法对两核线影像进行分块提取特征点并匹配,最终获得16个均匀分布的匹配点,把匹配点的Y坐标对应相减求取视差,所有点的视差均在1像素以内,故认为该核线影像对有效,可在此基础上进行密集匹配。
在核线影像的基础上生成金字塔影像并确定DSM制作区域,试验所选区域为:x方向为1000~16 000像素,y方向为1000~16 000像素,然后采用前述金字塔逐层匹配方法进行密集匹配,其中格网点间隔为13像素。对于金字塔分解层数的选择,考虑格网点预测中两影像之间多项式拟合精度问题,一般以金字塔的顶层影像长宽尺寸大小为1000像素左右或更小来确定金字塔匹配层数,本试验程序影像尺寸为16 384×16 306像素,5层金字塔影像的顶层影像尺寸为1024×1019像素,故金字塔匹配层数定为5层。其密集匹配的同名点展点如图5所示。

图5 同名点展点
求取两影像的密集匹配点坐标后,按照前述方法转换为原始影像的坐标后,采用正解有理函数模型进行三维坐标解算。图6为对应DSM的晕渲图。

图6 DSM的晕渲图
三、结束语
本文研究了资源三号线阵CCD影像密集匹配自动提取DSM的主要关键技术和流程。试验结果表明,应用投影轨迹法进行核线约束和核线影像生
成,并在试验的基础上通过影像匹配的方法进行核线影像自检核及RPC补偿(无控制点的情况下)是可行的,可以达到一维匹配的目的;此外,采用金字塔分层匹配并综合利用基于相关系数的动态窗口变换的双向匹配方法进行格网点的匹配可以获取密集匹配点云。但由于前后视的交会角较大,以后可采用多视匹配来加以改进,也可借助于SRTM(shuttle radar topography mission)数据进行辅助自动匹配。
参考文献:
[1]VINCENT C, TAO Y, WANG J. Photogrammetric Exploitation of IKONOS Imagery for Mapping Applications[J]. Remote Sensing, 2004, 25(14): 2833-2853.
[2]ZHANG L, GRUEN A. Multi-image Matching for DSM Generation from IKONOS Imagery [J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2006, 60: 195-211.
[3]巩丹超. 有理函数模型的解算与应用[J]. 测绘学院学报, 2003, 20(1): 39-46.
[4]刘军. 基于RPC模型的IKONOS卫星影像高精度立体定位[J]. 测绘通报, 2004(9): 1-4.
[5]张永生. 高分辨率遥感卫星立体影像RPC模型定位的算法及其优化[J]. 测绘工程, 2004, 13(1): 1-4.
[6]王伟玺. 基于广义立体像对的三维重建方法研究[D]. 阜新:辽宁工程技术大学, 2006.
[7]胡芬. 基于投影基准面的线阵推扫式卫星立体像对近似核线影像生成方法[J]. 测绘学报, 2008, 38(5): 428-436.
[8]LOWE D G. Distinctive Image Features from Scale-Invariant Keypoint[J]. Internation Journal of Computer Vision, 2004, 60(2): 91-110.
[9]秦绪文. 无需初值的RPC模型参数求解算法研究[J]. 国土资源遥感, 2005(4): 7-15.
[10]刘军. 有理函数模型在航空航天传感器摄影测量重建中的应用及分析[J]. 信息工程大学学报, 2002, 3(4): 66-69.
[11]李德仁. 我国第一颗民用三线阵立体测图卫星-资源三号测绘卫星[J]. 测绘学报, 2012, 41(3):317-322.
[12]卲茜. 线阵CCD卫星遥感影像成像处理模型[D]. 郑州:信息工程大学, 2006.
Research on Automatic Generation Technology of DSM for Line Array CCD Satellite Images
SONG Bing,LIN Hui,DING Cui,WANG Lijuan,SUN Huasheng
收稿日期:2015-08-14; 修回日期: 2015-09-27
基金项目:国家自然科学基金(41371438;41401397;41201454);江苏省自然基金青年项目(BK20140237)
作者简介:宋冰(1977—),男,博士生,研究方向为测量数据处理。E-mail:songbing@cumt.edu.cn
通信作者:林卉
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2016)06-0022-04
引文格式: 宋冰,林卉,丁翠,等. 线阵CCD卫星影像DSM自动生成技术[J].测绘通报,2016(6):22-25.DOI:10.13474/j.cnki.11-2246.2016.0182.
