有人/无人机协同作战指挥界面设计*
2016-07-12 08:23屈高敏
火力与指挥控制 2016年5期
李 隆,许 瑛,岳 源,屈高敏
(南昌航空大学飞行器工程学院,南昌 330063)
有人/无人机协同作战指挥界面设计*
李隆,许瑛,岳源,屈高敏
(南昌航空大学飞行器工程学院,南昌330063)
摘要:分析了近期内有人/无人机协同作战的体系结构及作战模式,基于三代战机座舱普遍装备的多功能显示器,展开有人/无人机指挥控制界面的设计;基于人机工程学观点和飞行员的视觉习惯,从缓解飞行员的心理和生理疲劳的角度出发布置无人机编队的飞行参数,设计了有人/无人机执行协同对地攻击任务时包含巡航队形、战斗队形、任务类型、导航点切换等功能的指挥控制界面。为未来短期内有人/无人机协同作战指挥控制系统研究提供参考。
关键词:有人机,无人机,协同作战,指挥控制界面
0 引言
无人机因其结构简单、造价低廉以及操作人员无生命危险等优点而备受各国青睐,在近年来的局部战争中表现突出。然而,由于无人机智能水平的限制,在未来相当长的一段时间内,难以取代有人机独立完成复杂的作战任务。因此,有人机与无人机联合编队作战将成为未来战争中的主要作战模式。有人机指挥控制无人机作战将成为未来空中作战的一种重要方式[1-2]。
目前,无人机协同作战逐渐受到了国外研究机构和学者的普遍关注。美国国防部认为,在未来的电子战场,有人驾驶飞机和各种侦察型、作战型、干扰型无人驾驶飞机将把通信和电子设施连结起来,形成一个无人机与无人机、无人机与有人机协同作战的航空电子战体系,实现对战场全维监视,建立对战场电磁态势的实时感知和电子攻击[3]。
为此,英美等无人机发展水平较高的国家均在加紧有人/无人机协同作战应用研究。英国QinetiQ公司试验验证了1架狂风战斗机引导BAC1-11无人机和3架仿真无人机对地面移动目标执行模拟攻击的过程[4]。美国陆军航空应用技术部(AATD)开展的有人机/无人机通用结构计划,针对“阿帕奇”直升机和“影子-200”战术无人机,开展有人机/无人机平台协同作战试验和研究[5]。
本文分析了有人/无人机协同作战体系结构及作战模式,构建了短期内有人/无人机协同作战可能采用的作战体系结构和作战模式。并据此设计了未来有人机对无人机的协同指挥控制界面。为未来近期内有人/无人机协同作战指挥控制系统研究提供参考。
1 有人/无人机协同作战体系结构
有人/无人机协同作战的体系结构主要有集中式和集散式两种。图1为集中式体系结构下的协同作战。集中式有人/无人机的协同重点体现在有人机对无人机的任务控制,即有人机在无人机任务执行过程中对其飞行、通信、载荷和任务等多个层面进行有效监管、指挥和控制。集散式结构中相对集中式结构增加了无人机之间的协同决策组件,当有人机与无人机中断联系时,无人机群之间通过信息交互,由无人机协同决策组件进行协同决策,对无人机进行操控[6]。

图1 集中式体系结构
在集中式体系结构中,有人机作为唯一的中央控制节点,具有极强的决策能力和权威,与无人机之间存在着一种主从关系。这种结构可以降低系统的复杂性,减少无人机间由协商产生的通信开销,是短期内有人/无人机协同作战的首选体系结构。
在集散式体系结构中,每架无人机可在任务执行过程中从自身利益出发,根据环境信息和自身状态对当前的任务计划进行评估,如果发现更有利于自身的规划,便将其提交给有人机,由有人机对每架无人机的提议进行总体评估,采纳能获得更好整体效能的提议。这种结构适用于规模大、通信基础设施和技术容易实现的系统,可作为中远期有人/无人机协同作战体系结构。
2 有人/无人机协同作战模式
在不同作战环境下,有人/无人机之间的协同作战模式可划分为:态势感知、协同攻击和协同防御。其中,协同攻击又分为对空目标攻击、分布式多任务协同攻击和跨平台制导[7]。
由于现代空战的不确知性和传统的智能控制技术的局限性[8],有人/无人机协同空战的出现还有待时日。本文的有人机主要指有人作战飞机,如双座歼击机或歼击轰炸机。有人/无人机之间的协同编队方式主要为1架有人机和多架无人机以及多架有人机和多架无人机混和编队。以态势感知和对地协同攻击作战模式为主。
利用有人/无人机的多个资源对同一地区展开协同侦查,可有效提高侦察效率,极大增强有人/无人战斗机编队的情报感知能力。图2为利用多无人机对有源辐射目标实施协同定位。
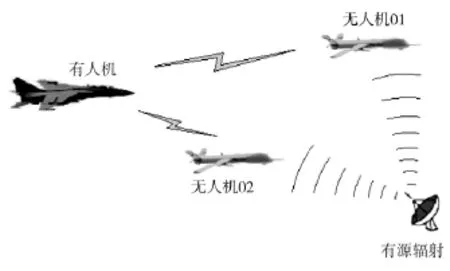
图2 多无人机协同态势感知
在执行对地攻击作战任务中,可以实现分布式的协同攻击作战,即每架无人机各自配置不同的传感器以及不同类型的对地攻击武器,降低单架无人机作战成本。图3为多无人机分布式协同攻击作战。
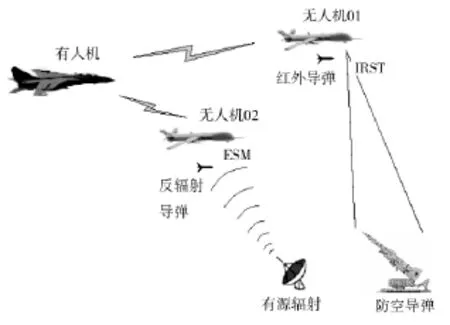
图3 多无人机分布式协同攻击
根据北约STANAG 4586标准[9],有人机对无人机的协同控制级别可以分为5级,如下页表1所示。要实现有效的协同作战,应达到4级协同控制级别。

表1 有人机对无人机的协同控制能力级别
本指挥控制系统主要实现在任务过程中有人机对无人机航路、载荷等的监控与指挥控制。既要满足有人机向无人机下达作战指令,又要无人机能够实时将战场态势及情报信息反馈给有人机。这就要求实现有人机和无人机之间的互联、互通、互操作。
目前,我国空军战机整体实现了从“第二代”向“第三代”的跨越,多种三代战机已经成为我军空战主体作战力量[10]。对已有战机加装通讯组件,进行适当改装,将其作为有人/无人机协同作战系统的有人机平台,将有利于节省装备改装成本和人员训练成本,并快速开展相关实验训练任务。因此,需要基于三代机座舱显示系统设计针对无人机的指挥控制界面。
3 有人/无人机指挥控制界面设计
3.1设计依据
20世纪80年代以来,以F-15E双座多用途战斗机为代表,战斗机座舱显示设备普遍采用以平视显示器(HUD)为主,3个多功能显示器(MFD)分别显示传感器、电子战、联合战术信息分配系统数据的布局[11],即“一平三下”布局。所以,有人/无人机指挥控制界面的设计将基于MFD展开。
同时,应该充分考虑飞行员的视觉习惯,使飞行员对信息辨识速度增快、误读率减小、可靠性提高,并能缓解飞行员的心理和生理疲劳[12-13]。因此,在界面中,应注意左参数,右任务的视觉习惯,即界面左方显示无人机编队飞行参数,右方显示当前任务列表和数据链状态信息。
3.2界面布局
以执行对地搜索攻击作战任务为例,进入搜索阶段的指挥控制界面如图4所示,是在有人机MFD所显示的水平位置显示仪(HSD)界面上增加无人机协同信息构成。此界面通常显示在右边MFD上。其中,半圆加短线图标表示无人机,短线代表无人机当前速度矢量方向,数字为无人机编号,扇形区域表示无人机传感器搜索范围。界面左下显示无人机编队飞行参数,右下显示当前任务列表和数据链状态。
同时还需分配5个选项选择按钮(OSB),分别为:巡航队形、战斗队形、任务类型、导航点切换,通过对应的OSB按钮实现以上功能。选择“巡航队形”选项,将展开下级选项,包含斜一字队形、楔形队形、菱形队形等队形以及编队间距;选择“战斗队形”选项,将展开和巡航队形类似的下级选项;选择“任务类型”选项,将展开任务类型下级选项,包含搜索、监视、攻击等任务类型;选择“导航点”选项两边的三角形箭头切换导航点。
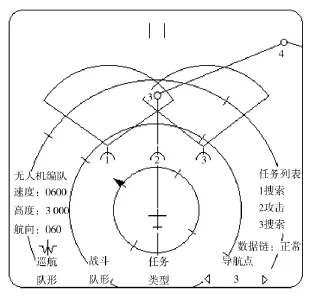
图4 有人/无人机协同指挥HSD界面
3.3应用分析
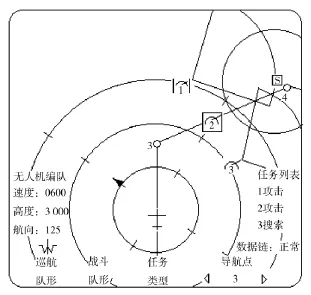
图5 出现突发威胁时的指挥控制界面
当无人机感知到突发威胁时将自行对其进行分析确认,并将威胁信息传给有人机,显示在有人机指挥控制界面上。假若无人机感知到了地面防空单元,如图5所示。带有“S”的小方框代表地面防空单元,其周围的圆环表示地面防空单元武器射程,无人机进入地面防空单元武器射程将有可能遭到攻击。图中2号无人机图标被实线框套住,表示2号无人机被地面防空单元雷达锁定,这时警告音响起,提示有人机操纵员留意2号无人机状态,以免被击落。
如果有人机操作员不对无人机下达任何指令,无人机将按照机内决策指挥模块的自主决策对威胁做出反应。如果有人机操作员要对无人机的任务过程进行指挥控制,就用目标截获光标(TAC,即图中的一对垂直短线)选中要指挥的无人机,对其进行控制。如图5所示,将要指挥1号无人机提前对防空单元进行攻击。用TAC光标选中1号无人机,通过“任务类型”选项设置其任务类型为“攻击”。随后1号无人机将对地面防空单元发动自主攻击。
同时左边MFD自动切换到1号无人机控制界面。图6所示为1号无人机导航控制界面,操作员可以通过图中对应的OSB按钮控制无人机的速度、高度和航向。界面右下角的“自主”选项表示放弃当前指挥,无人机将进入自主决策状态。界面上方控制选项分别为:导航、雷达、红外、电视、挂载(当前“导航”选项为选中状态)。操作员可以通过以上选项对应的OSB按钮在相应的界面中切换并进行控制,以完成对目标的识别及打击。
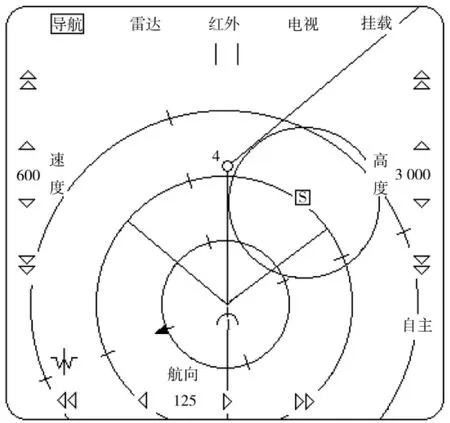
图6 单架无人机导航控制界面
图7所示为红外传感器指挥控制界面。界面左边选项分别对应红外传感器视野的俯仰和偏转控制,通过不同朝向的三角形箭头表示对应的方向。界面右边的“扫掠”、“凝视”选项分别对应传感器的扫掠和凝视模式,“自主”选项将使无人机进入自主决策状态。界面底边的选项分为:倍率、锁定、开火,分别控制传感器视场的放大倍率,对目标的锁定及解锁,选定武器的投放。
完成攻击后,可按照飞行计划进行下一步行动,或者由有人机操作员操作进入其他传感器界面,评估打击效果,以决策下一步行动。确认目标摧毁后,从图4所示HSD界面选择战斗队形或巡航队形,指挥无人机重新进入战斗队形继续“搜索-打击”任务,或者进入巡航队形返航。
4 结论
本文提出了基于三代机“一平三下”座舱布局的有人/无人机指挥控制界面的设计方法;建立了有人/无人机执行对地搜索攻击作战任务时包含巡航队形、战斗队形、任务类型、导航点切换等功能的指挥控制界面。随着有人/无人机协同作战研究的不断发展,今后还应该吸收国内外先进技术,不断完善有人/无人机指挥控制系统,为操作员提供多种选择,提高指挥控制效率。
参考文献:
[1]华人杰,曹毅风,陈惠秀,等.空军学术思想史[M].北京:解放军出版社,2008.
[2]董彦非,崔巍,张旺.有人机/无人机协同空战效能评估的综合指数模型[J].飞行力学,2014,32(5):472-476.
[3]刘慧霞,席庆彪,李大健,等.电子战无人机协同作战关键技术发展现状[J].火力与指挥控制,2013,38(9):6-8.
[4]ROBERTO D,RICHARD L. Flexible UAV/UCAV mission management using emerging technologies[C]//Command and Control Research and Technology Symposium.California:US Naval Postgraduate School,2002.
[5]DONALD W. Manned/unmanned common architecture program(MCAP):a review[C]//Proceedings of the 22nd Digital Avionics Systems Conference.New York:IEEE,2003.
[6]黄长强,翁兴伟,王勇,等.多无人机协同作战技术[M].北京:国防工业出版社,2012.
[7]王焱.有人/无人机协同作战[J].电讯技术,2013,53(9):1253-1258.
[8]邵凝宁.数据链指挥下无人机群超机动对空对地攻击研究[D].南京:南京航空航天大学,2006.
[9]STEFANO F,MARCO P. A STANAG 4586 oriented approach to UAS navigation[J].Journal of Intelligent & Robotic Systems,2013,69(1-4):21-31.
[10]梁守磊.人民空军装备发展60年[J].国防科技工业,2009,21(11):46-48.
[11]张雄安,张荆.未来的战斗机座舱[J].电光与控制,1998,5(1):11-20.
[12]庄达民,完颜笑如.飞行员注意力分配理论与应用[M].北京:科学出版社,2013.
[13]孙滨生.现代战斗机座舱布局[M].北京:航空工业出版社,1989.
Command Interface Design of Cooperative Attack for Manned/Unmanned Aerial Vehicles
LI Long,XU Ying,YUE Yuan,QU Gao-min
(Nanchang Hangkong University,Nanchang 330063,China)
Abstract:Analyzed the short term architecture and combat mode of cooperative attack for manned/ unmanned aerial vehicles,based on the multi-function displays of the third generation fighters,the design of command and control interface for manned/unmanned aerial vehicles is started.Based on human factors engineering and the vision habits of pilots,the flight parameters of UAVs formation considering the psychological and physiological fatigue of pilots are arranged,the command and control interface of cooperative attack for manned/unmanned aerial vehicles including the switching function of cruising formation,combat formation,mission type and navigation point is designed.References for the short term researches of command and control system of cooperative attack for manned/unmanned aerial vehicles are provided.
Key words:manned aerial vehicles,unmanned aerial vehicles,cooperative attack,interface of command and control
中图分类号:V271.4;E926
文献标识码:A
文章编号:1002-0640(2016)05-0130-04
收稿日期:2015-05-05修回日期:2015-05-27
*基金项目:江西省研究生创新专项基金(YC2014-S396);江西省人社厅留学人员科技项目(DB201406147)资助课题
作者简介:李隆(1986-),男,陕西华阴人,硕士研究生。研究方向:飞行器总体设计与系统仿真研究。
猜你喜欢
小哥白尼(军事科学)(2021年1期)2021-07-16
科学与财富(2021年36期)2021-05-10
小哥白尼(军事科学)(2020年12期)2021-01-18
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
军事运筹与系统工程(2016年4期)2016-07-10
科技视界(2016年13期)2016-06-13
企业导报(2016年9期)2016-05-26