局部阴影下光伏阵列MPPT算法及实现
2016-07-01 01:40邵伟明程树英林培杰李炎东
电源学报 2016年1期
邵伟明,程树英,林培杰,李炎东
(福州大学物理与信息工程学院微纳器件与太阳能电池研究所,福州350108)
DOI:10.13234/j.issn.2095-2805.2016.1.18中图分类号:TM744文献标志码:A
局部阴影下光伏阵列MPPT算法及实现
邵伟明,程树英,林培杰,李炎东
(福州大学物理与信息工程学院微纳器件与太阳能电池研究所,福州350108)
针对传统最大功率点跟踪全局扫描法用时长的缺陷,对局部阴影下光伏阵列输出特性进行分析,获得归一化的最大功率点电压的分布规律。利用该规律结合扰动观察法,提出一种改进型全局最大功率跟踪的扫描算法。首先,确定可能存在局部最大功率点的区域;然后,对该区域使用扰动观察法局部扫描,获得所有的局部最大功率点;最后,选取其中最大的点作为全局最大功率点。该算法能够大幅度缩短扫描时间,使系统快速确定全局最大功率点。实验采用Boost和全桥电路作为拓扑,以DSP为主控制芯片搭建了一套验证系统。实验数据表明在双峰和三峰情况下,与全局扫描法相比该算法节约了50%以上的时间。该算法推广到更多峰的情况具有同样的适用性。
光伏阵列;局部阴影;全局最大功率点跟踪;扰动观察法
Project Supported by the National Natural Science Foundation of China(61340051);the Educational Department Project of Fujian Province(JK2014003;JA14038);the Science and Technology Department Project of Fujian Province(2015H0021)
引言
在光伏发电中,由于太阳能电池输出功率受外界环境影响较大,为了获得光伏阵列最大电能的输出,需对其进行最大功率点跟踪MPPT(maximum power point tracking)[1]。光伏发电系统发电功率通常较大,而单块太阳能电池的功率通常为100 W或200 W,因此需要将多块太阳能组件串并联组成光伏阵列进行使用。对于光伏阵列,它在使用过程中容易受到尘土、建筑、树木等造成的阴影影响,此时由于其单块太阳能组件并联一个旁路续流二极管,会使光伏阵列对外呈现多峰特性[2]。此时,传统的MPPT算法,如扰动观察法、导纳增量法等针对光伏阵列正常输出的算法将会失效,使光伏阵列的工作点处于一个局部的极值上,而不是全局最大功率点GMPP(global maximum power point)[3]。当前针对多峰MPPT在实际应用中主要有全局扫描法和改进的全局扫描跟踪法,它们都有用时较长的缺点[4,5]。文献[6-8]等提出的基于粒子群等智能算法的MPPT还处于研究和仿真阶段,由于其需要大量的数据和运算,难以在微控制器上实现;文献[9-11]给出3种多峰跟踪的实现方法,其找到全局最大功率并稳定的时间分别为0.94 s、1.6 s和20 s。
本文提出一种工程适用的改进型扫描算法,通过研究光伏阵列输出特性及其局部最大功率点电压分布规律,以此确定可能存在局部最大功率点的区域,然后对该区域使用扰动观察法的局部扫描,最后获得所有的局部最大功率点后,选取最大值的点作为全局最大功率点。实验采用TMS320F2812为主控制芯片,以Boost及全桥电路为主电路,设计了一套由6块太阳能电池板串联的单串600 W光伏发电系统进行验证。
1 光伏阵列的多峰特性
1.1光伏阵列输出物理特性
文献[1-13]均指出光伏阵列在局部阴影情况下的多峰特性,其主要是因为当某块太阳能电池被遮挡时,由于所接受到的光照下降,从而导致被遮挡的太阳能电池的I-V特性曲线上的短路电流下降,同时其开路电压也会相应下降,该块太阳能电池输出功率将与其他太阳能电池不匹配,导致光伏阵列的输出特性发生改变形成多峰特性。
本文主要是针对一串6个太阳能电池板的光伏阵列进行分析,一串6个太阳能电池板最多可能出现6个峰值点,即当6块太阳能电池所受到的光照强度均不一样时,其该光伏阵列的输出特性如图1所示。光伏阵列多峰特性的形成通常以其I-V特性来分析,如图1虚线部分为光伏阵列的I-V特性曲线,实线部分为光伏阵列的P-V特性曲线。当光伏阵列的输出电压从0开始增加时,光伏阵列的输出端近似短路,此时光伏阵列会以最大电流输出,其输出最大电流为所受光照强度最大的那块太阳能电池板A的短路电流。其他太阳能电池板由于受光照强度的限制,没法通过那么大的电流,因此该电流主要通过并联二极管流过,则此时光伏阵列的输出电压、输出电流近似为太阳能电池板A的输出电压、输出电流。随着输出电压的提高,输出电流也慢慢下降,太阳能电池板A可能达到输出最大功率点,这就是光伏阵列的第1个局部最大功率点。但是随着电压继续上升,输出电流持续下降,达到太阳能电池板B的最大输出电流,此时电流不再从太阳能电池板B两端并联的二极管流过,而是通过太阳能电池板B流过。随着电压的继续上升,光伏阵列的电压主要由太阳能电池板A和B提供,在太阳能电池板B到达其最大功率输出点之前,其输出电流将以近似恒流源输出,从而形成第1个膝点。之后,随着光伏阵列输出电压的提高,以同样的规律形成第2、3、4、5、6个膝点,其中第6个膝点即为光伏阵列开路时的输出状态。根据对光伏阵列的输出特性曲线进行分析,能够清晰地看到,当膝点在MPP点在IU曲线对应点之后,每个阶梯的末端都可能存在一个对应的局部最大功率点,且局部最大功率点对应在阶梯的尾部。

图1 阴影条件下光伏阵列输出特性曲线Fig.1 Photovoltaic array output characteristic curves under partial shadow
1.2光伏阵列峰值分布规律及其仿真验证
采用文献[14]的方法,基于漳州国绿太阳能科技有限公司晶体硅太阳能电池组件GL-100搭建MATLAB/simulink一串6个的仿真模型,其4参数分别为Voc=21.5 V,Isc=6 A,Vmpp=17.5 V,Impp=5.7 A。使用受控电压源作为负载,通过电压扫描的方式寻找最大功率点。
仿真模拟各种可能出现的局部阴影类型[10],通过将单块太阳能电池板的光照强度乘以一个阴影系数,实现单块太阳能电池板出现阴影及多块太阳能电池板出现不同程度的阴影,因此会出现双峰、3峰、4峰、5峰和6峰5种情况,然后分别采集了每个峰值点的对应电压,对在光照条件100~1 000 W/m2、间隔为20 W/m2,温度为-10~80℃、间隔为2℃总共20 250个数据进行分析。
光伏阵列在不同的局部阴影下,其最大功率点电压将呈现不同分布,6×1光伏阵列在各种局部阴影条件下最大功率点数量相对于最大功率点电压的柱状分布统计如图2所示。光伏阵列电压分布为0~120 V,被均分为500个区间。由图2可以很清晰地看到,电压会在局部分布会集中在一定的区域,但是聚集的规律性不强。
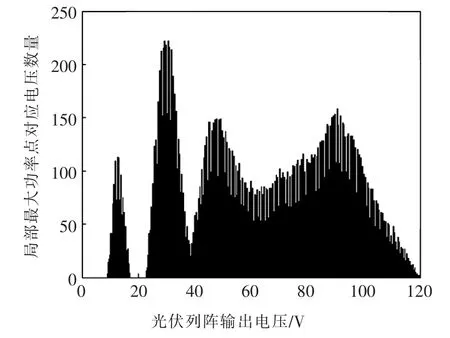
图2 峰值电压数量分布Fig.2 Quantitative distribution of peak voltage
为了使数据具有更好的聚集性,采用最后一个峰值电压对所有的电压数据进行归一化,其数量分布如图3所示。横坐标从0到1分为100个区间,可以发现其分布规律更为集中,峰值电压数量出现6个突增点,突增点两侧峰值数量呈近似正态分布式向两侧递减。横坐标0.13~0.15为MPP6,突增点E为0.14;横坐标0.3~0.32位MPP5,突增点D为0.31;横坐标0.48~0.52为MPP4,突增点C为0.5;横坐标0.67~0.73为MPP3,突增点B为0.7;横坐标0.85~0.93为MPP2,突增点A为0.89;当横坐标为1.0时为MPP1,由于MPP1是归一化的基准值,所以在图3中不做统计,因为存在MPP1的数量是所有的总和。

图3 基于最后一个峰值归一化的峰值电压数量分布Fig.3 Quantitative distribution of normalize peak voltage based on last peak
2 算法设计及仿真验证
2.1算法设计
根据上述对光伏阵列的输出特性的分析和仿真,得到了峰值的分布规律,据此提出基于归一化峰值概率分布的多峰MPPT算法。通过事先对光伏阵列的分析,确定其最大功率点存在的位置,只对这些位置进行扫描,能够大大减小扫描时间。
以光伏阵列发生遮挡出现6个峰值时的P-V特性曲线为例,说明算法的跟踪过程,算法示意见图4。
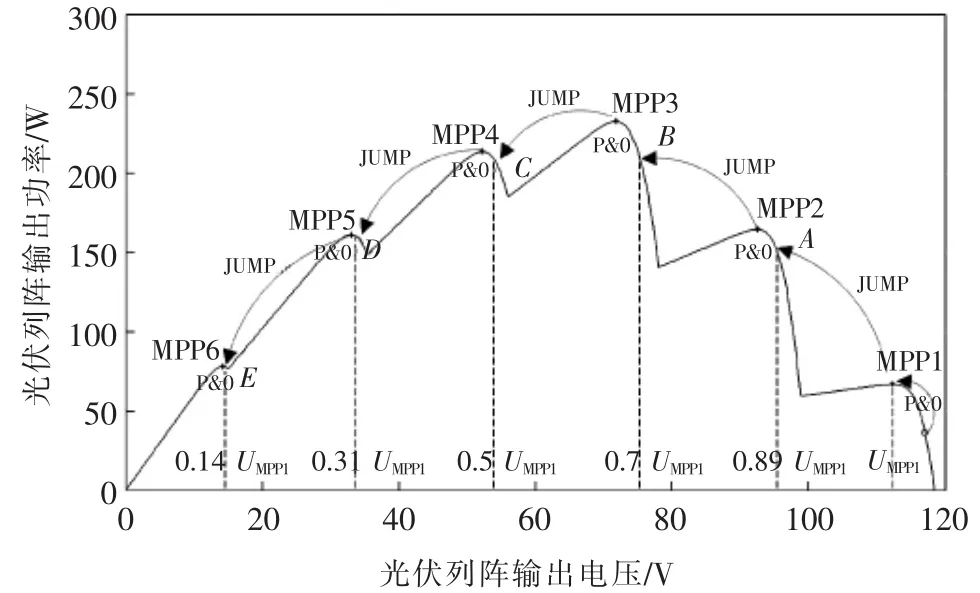
图4 算法跟踪过程示意Fig.4 Sketch map of algorithm tracking process
其软件流程如图5所示。
步骤1进行最后1个峰的寻找,即初始峰值点的搜索。
当算法初始化后,初始位置为图4中Start位置。采用常规的扰动观察法搜索离光伏阵列开路电压点最近的峰值点,寻找到图4中MPP1处,记录此时的最大功率PMPP1和该点对应电压UMPP1。
步骤2搜索其余局部最大功率点。

图5 软件流程Fig.5 Flow chart of software
找到MPP1后,根据图3,以峰值电压数量突增点为电压跳跃点(其中第1个跳跃点为A位于0.89 UMPP1处),再使用常规的扰动观察法搜索最近的最大功率点,寻找到MPP2,记录最大功率PMPP2和该点对应电压UMPP2,并将FindFlag置1。同理,B为第2个跳跃点位于0.7 UMPP1,C为第3个跳跃点位于0.5 UMPP1,D为第4个跳跃点位于0.31 UMPP1,E为第5个跳跃点位于0.14 UMPP1。此时记录MPP2~MPP6对应的最大功率及其对应的电压,并将FindFlag置1。因为光伏阵列不一定出现6个峰值,因此需要设定一个阈值,一些位置不存在时需要及时跳跃到下一个峰值范围进行最大功率点查找。由图3可见,MPP2的范围最大,以其突变点与其变化范围最大距离为阈值,即0.04 UMPP1。在实际使用,通常D点和E点附近的MPP点对应电压太低,因此通常设定了一个最小输出电压Umin,使输出电压不至于太低。
步骤3确定全局最大功率点。
比较所有记录的最大功率点的功率,确定最大功率点位置,并将其对应的电压设为工作电压,即令系统工作在全局最大功率点。
2.2算法仿真验证
Matlab仿真模型如图6所示,其开路电压为21.5×6 V,短路电流为6 A,在标准条件下输出功率为600 W。采用Boost电路,用S-Function进行算法控制,软件控制流程见图5。
在仿真过程中将最小输出电压Umin设置为20 V,因此将被忽略到E点附近的局部最大功率点。
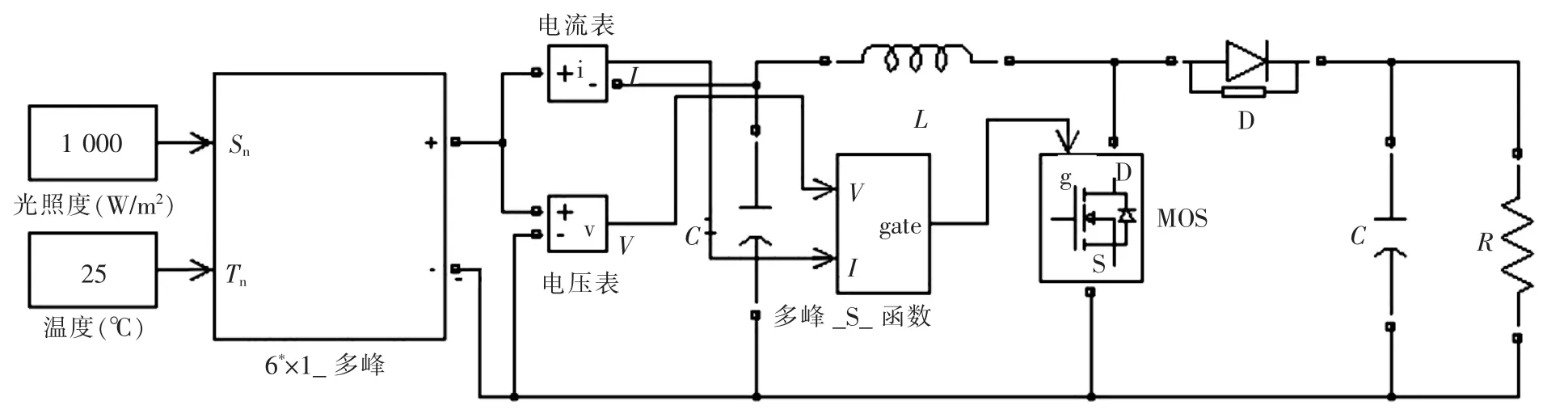
图6 仿真验证模型Fig.6 Simulation model
出现2个最大功率点时,采用全局扫描算法和本文算法的功率跟踪对比曲线如图7所示。图(a)中,虚线为全局扫描算法,用时0.09 s;实线为本文算法,用时0.03 s,比全局扫描算法节约了66%时间。图(b)中,实线为当光伏阵列出现两个最大功率点时的P-V特性曲线,Start点为算法起始点,虚线框为该算法的扫描范围。其跟踪过程为首先寻找到第1个最大功率点MPP1,跳跃到可能存在最大功率点的A点,使用扰动观察法,在一定范围内发现查找不到最大功率点;跳跃到B点,使用扰动观察法寻找不到最大功率点;再跳跃到C点,能够查到最大功率点MPP4;再跳跃到D点,也查找不到最大功率点。将查找到的2个最大功率点的功率做比较,输出使输出最大功率的对应电压,即使其在MPP1点输出。
5峰值时不同跟踪算法跟踪效果对比如图8所示。
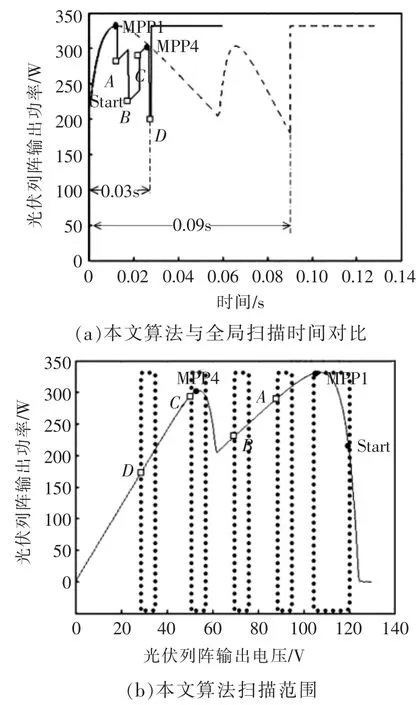
图7 双峰值时不同跟踪算法跟踪效果对比Fig.7 Comparison of different tracking algorithms between different tracking algorithms when two peaks

图8 5峰值时不同跟踪算法跟踪效果对比Fig.8 Comparison of different tracking algorithms between different tracking algorithms when five peaks
与图7(a)同理,图8(a)使用本文算法会找到5个局部最大功率点,最后令其以MPP2输出,用时为0.025 s;而采用全局扫描法用时0.11 s,节约时间77%。图8(b)为本文算法在5峰局部最大功率点情况下的扫描范围。
通过仿真验证,使用本文的跟踪算法,可以很明显节省了超过50%的时间,证明该算法具有加快局部最大功率跟踪的效果。
3 实验
实际测试以6块漳州国绿太阳能科技有限公司晶体硅太阳能电池组件GL-100构成一串6个光伏阵列,采用Boost电路和全桥逆变电路为电路主结构,用TMS320F2812为主控制器,完成了一套600 W的并网逆变器样机,其系统结构框图如图9所示。

图9 系统硬件设计框图Fig.9 Block diagram of system hardware design
在实际测试中,多峰模拟是采用不同透光率的塑料薄膜遮挡的方式来实现,超过3峰的多峰情况较难以实现,而且实际多峰的产生通常都由建筑物遮挡产生,不可能存在小面积光伏阵列出现多种不一样的光照强度。因此,仅对局部阴影产生双峰和3峰的情况进行测试。
研制的并网逆变器样机如图10所示。应用本文算法进行最大功率跟踪,其中,扰动观察法采用CPU定时器0中断,间隔5 ms运行1次,其步长为0.2%的占空比。实际使用中光伏阵列输出电压不能太低,设定光伏阵列最小输出电压Umin为50 V,因此扫描不到D点与E点附近的最大功率点。使用RIGOL公司DS5022ME型号的双踪示波器对光伏阵列实时功率进行跟踪,将通道1缩小10倍跟踪光伏阵列输出电压,在光伏阵列输出回路串一个0.1 Ω的水泥电阻使用通道二测量,得到的是缩小10倍的电流,并使用Math的乘法功能在示波器上显示实时最大功率曲线。由于同时对电压和电流缩小相同倍数,功率曲线不会变形,因此在示波器屏幕上显示按比例缩小的图像。

图10 并网逆变器样机Fig.10 Prototype of grid inverter
采用台湾泰仕电子工业股份有限公司PROVA-1011型号的太阳能系统分析仪,对局部阴影情况下的光伏阵列输出P-V和I-V特性进行测量,测量结果及功率跟踪曲线如图11和图12所示。

图11 实际双峰时光伏阵列的输出特性曲线及功率跟踪曲线Fig.11 The photovoltaic array output characteristic curves and power tracking curves when two peaks

图12 实际3峰时光伏阵列的输出特性曲线及功率跟踪曲线Fig.12 Photovoltaic array output characteristic curves and power tracking curves when three peaks
图11(b)为实际双峰时的功率跟踪曲线。根据设计的算法,硬件系统会从靠近开路点的电压开始进行最大功率跟踪,首先找到的是第1个最大功率点MPP1其电压为UMPP1=105.9 V,然后跳跃到可能存在最大功率点A的位置进行查找,发现不存在最大功率点后跳跃到B点进行查找,又发现不存在最大功率点后跳跃到C点进行寻找最大功率点,最终寻找到MPP4,由于再下一个可能存在最大功率点D的电压为0.31 UMPP1=32.829 V,其电压小于50 V不再进行查找,最后以最大功率运行,总共对4个区域进行最大功率跟踪,总共需要用时1.05 s。
图12(b)为实际三峰时的功率跟踪曲线,根据设计的算法,硬件系统会从靠近开路点的电压开始进行最大功率跟踪,首先找到的是第1个最大功率点MPP1其电压约为UMPP1=113 V,然后跳跃到可能存在最大功率点A的位置进行了长时间的寻找,找到了第2个最大功率点MPP2,再跳跃到可能存在最大功率点B的位置后,向左寻找到第3个MPP3,其对应电压约为70 V。下个可能存在最大功率点C的位置0.5 UMPP1=61.5 V,它是向右进行最大功率点跟踪,其对应电压与MPP3对应电压的差值8.5 V小于峰值最小电压差值UMPP1/6=18.83 V,这个区间不会再有最大功率点,因不会对C附近进行寻找。再下一个可能存在最大功率点D的电压为0.31 UMPP1= 35.03 V,其电压小于50 V也不再进行查找,最后以最大功率运行,因此在3峰条件下总共对3个区域进行最大功率跟踪,总共需要用时为0.7 s。
其中3峰扫描时间比双峰的短的原因,是因为峰值更多,使寻找的范围更加小,使其不用对图11中的A、B位置阈值内的全部范围进行查找,而只需要找到最大功率点就可进入下一个区域(如图12中的A、B位置),这与仿真的规律一致。若采用全局扫描法最大扫描范围是占空比从0~88%,采用相同的时间间隔和步进长度进行查找,最多需要用时2.2 s,分别节约52.3%和68.2%的时间。与文献[9-11]进行比较,3峰条件下本文算法跟踪到全局最大功率点的时间比文献[9-11]给出的时间更短。
因此根据仿真情况及双峰和3峰的测试,可以推理出本文算法可以在局部阴影产生更多峰的情况适用,该算法能够对光伏阵列进行最大功率点跟踪,且能够准确找到可能存在的最大功率点,并最后使系统以最大功率点输出,并且与全局扫描法相比节约了超过50%时间,证明本文算法有一定的实用性。
4 结语
本文针对光伏阵列的输出特性,通过对光伏阵列输出物理特性进行分析,研究光伏阵列在不同阴影条件下的多峰分布规律。基于该规律对光伏阵列输出多峰的位置进行预测,并对只这些位置进行扫描,与全局扫描法相比节省了大量的扫描时间,能够大大提高光伏阵列的太阳能利用率,并且与智能算法相比其对控制器的要求不高,仅需要在进行算法设计时对光伏阵列进行分析。由于光伏阵列的输出特性具有相似性,在光伏阵列规模扩大时用该算法的逆变器也能够适用,因此该算法在工程上有较好的实用性。
[1]Esram T,Chapman P L. Comparison of photovoltaic array maximum power point tracking techniques[J]. IEEE Transactions on Energy Conversion EC,2007,22(2)∶439.
[2]胡浩磊,杨富文.部分遮阴条件下光伏阵列最大功率点跟踪方法[J].电源学报,2013,11(2)∶23-29. Hu Haolei,Yang Fuwen. Maximum power point tracking method for PV array under partial shadow conditions[J]. Journal of Power Supply,2013,11(2)∶23-29(in Chinese).
[3]薛蕾,赵建辉,李帆,等.光伏系统多峰最大功率点跟踪法研究[J].太阳能学报,2014,35(8)∶1422-1428. Xue Lei,Zhao Jianhui,Li Fan,et al. Research of global maximum power point tracking in photovaltaic system[J]. Acta Energiae Solaris Sinica,2014,35(8)∶1422-1428(in Chinese).
[4]贾林壮,陈侃,李国杰,等.局部阴影条件下光伏阵列MP PT算法研究[J].太阳能学报,2014,35(9)∶1614-1621. Jia Linzhuang,Chen Kan,Li Guojie,et al. The MPPT method research for PV array under partial shadow conditions[J]. Acta Energiae Solaris Sinica,2014,35(9)∶1614-1621(in Chinese).
[5]孙博,梅军,郑建勇.局部阴影条件下最大功率点跟踪改进算法[J].电力自动化设备,2014,34(1)∶115-119,127. Sun Bo,Mei Jun,Zheng Jianyong. Improved MPPT method under partial shading conditions[J]. Electric Power Automation Equipment,2014,34(1)∶115-119,127(in Chinese).
[6]Miyatake M,Veerachary M,Toriumi F,et al. Maximum power point tracking of multiple photovoltaic arrays∶a PSO approach[J]. Aerospace and Electronic Systems,IEEE Tra nsactions on,2011,47(1)∶367-380.
[7]Renaudineau H,Donatantonio F,Fontchastagner J,et al. A PSO-based global MPPT technique for distributed PV power generation[J]. Industrial Electronics,IEEE Transactions on,2015,62(2)∶1047-1058.
[8]赵争鸣.太阳能光伏发电最大功率点跟踪技术[M].北京∶电子工业出版社,2012.
[9]陈艳,郑永.局部阴影下光伏最大功率跟踪的混沌搜索新算法[J].中国电机工程学报,2013,33(S1)∶46-53. Chen Yan,Zheng Yong. New algorithm of chaos research of photovoltaic maximum power point tracking under partial shade[J]. Proceedings of the CSEE,2013,33(S1)∶46-53.(in Chinese).
[10]王镇道,李炳璋.一种光伏系统的多峰值最大功率点跟踪策略[J].电力电子技术,2014,48(9)∶4-6. Wang Zhendao,Li Bingzhang. A novel global maximum power point tracking strategy for photovoltaic system[J]. Power Electronics,2014,48(9)∶4-6(in Chinese).
[11]唐磊,曾成碧,苗虹.基于蒙特卡洛的光伏多峰最大功率跟踪控制[J].电工技术学报,2015,30(1)∶170-176. Tang lei,Zeng Chengbi,Miao Hong. A novel maximum power point tracking scheme for PV systems under partially shaded conditions based on monte carlo algorithm[J]. Transactions of China Electrotechnical Society,2015,30(1)∶170-176.
[12]朱彬彬,杨勇,季爱民,等.基于光伏阵列建模的阴影多峰值电压估算[J].电网与清洁能源,2014,30(11)∶145-151. Zhu Binbin,Yang Yong,Ji Aimin,et al. A multi-peakvoltage estimation method based on a universal model of PV arrays under partial shading conditions[J]. Power System and Clean Energy,2014,30(11)∶145-151(in Chinese).
[13]戚军,翁国庆,章旌红.光伏阵列多峰最大功率点分布特点研究[J].电力自动化设备,2014,34(3)∶132-137,143. Qi Jun,Weng Guoqing,Zhang Jinghong. Multi-Peak MPP distribution of photovoltaic array[J]. Electric Power Automation Equipment,2014,34(3)∶132-137,143(in Chinese).
[14]李洁,刘蕴达.光伏电池和MPPT控制器的仿真模型[J].电源技术,2012.36(12)∶1836-1839. Li Jie,Liu Yunda. Simulation models of photovoltaic battery and MPPT controller[J]. Chinese Journal of Power Sources,2012.36(12)∶1836-1839(in Chinese).
MPPT Algorithm and Realization for Photovoltaic Array under Partial Shadow
SHAO Weiming,CHENG Shuying,LIN Peijie,LI Yandong
(Institute of Micro-Nano Devices and Solar Cells,School of Physics and Information Engineering,Fuzhou University,Fuzhou 350108,China)
In view of the defects of the traditional global scanning maximum power point tracking(MPPT)algorithm,the partial shadow photovoltaic array output characteristics are analyzed to obtain the rule of the normalized voltage of maximum power point(MPP). Using this rule combines the perturbation and observation method(P&O),an improved global scanning MPPT algorithm is put forward. First,it determines the possible areas of all MPP,scans these areas by P&O,and it can obtain all the partial maximum power points to find the global MPP by comparing them. As a result,it can greatly shorten the scan time,and make the system quickly find out the global MPPT. Experiments use the Boost and the whole bridge circuit as topology and set up a verification system by DSP. Data show that the algorithm can save more than 50%of the time compared with the global scanning method in the condition of two peaks and three peaks. This algorithm has the same applicability in the case of more peaks.
photovoltaic array;partial shading;global maximum power point tracking(MPPT)algorithm;perturbation and observation(P&O)method
2015-07-27
国家自然科学基金项目(61340051);福建省教育厅省属高校科研专项项目(JK2014003);福建省教育厅产学研项目(JA14038);福建省科技厅工业引导性重点项目(2015 H0021)
邵伟明(1990-),男,硕士研究生,研究方向∶光伏并网逆变器及其故障诊断,E-ma il:281416586@qq.com。
程树英(1966-),女,通信作者,博士,教授,研究方向:光伏材料与器件、光伏发电系统、光伏故障诊断,E-mail:sycheng@fz u.edu.cn。
林培杰(1982-),男,通信作者,博士生,讲师,研究方向:光伏发电、光伏阵列故障诊断,E-mail:linpeijie@fzu.edu.cn。
李炎东(1990-),男,硕士研究生,研究方向:光伏发电与嵌入式系统,E-mail:6398 27127@qq.com。
猜你喜欢
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
电子制作(2018年12期)2018-08-01
知识就是力量(2017年12期)2018-01-15
数字技术与应用(2017年6期)2017-09-08
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14
中国光学(2015年5期)2015-12-09