
波阵面视角下的车辆拥堵分析
2016-07-01 14:41胡晓晓白宝钢王长红朱晨杰陈军华
浙江大学学报(理学版) 2016年4期
邵 江, 胡晓晓, 白宝钢, 王长红, 朱晨杰, 陈军华
(温州医科大学 信息与工程学院, 浙江 温州 325035)
波阵面视角下的车辆拥堵分析
邵 江, 胡晓晓*, 白宝钢, 王长红, 朱晨杰, 陈军华
(温州医科大学 信息与工程学院, 浙江 温州 325035)
基于视频数据,分析了交通事故下车辆运动的复杂性和队长变化的本质,借鉴车流波动理论、车辆跟驰理论、流体力学理论等,提出利用波阵面的传播轨迹描述排队过程,并给出了排队长度动态模型VQLM.同时,为减少视频图像与实际距离的转换误差,提出以标准当量车为参考,多次迭代还原真实距离的标定方法.研究结果表明:VQLM模型较基于单一理论计算队长的方法更精确、实用.模型验证结果:平均队长误差为-3.029%,其宏观表现为2辆当量车10 m内,延时误差为7 s(信号周期为60 s).VQLM模型主要考虑了司机驾驶的主观性、道路通行强度、交通波节点函数等;数据还原标定方法简单实用,比传统比例尺算法更为精确.
交通波理论;通行强度;波阵面传播;排队过程;数据还原
在世界各国经济普遍繁荣的时代,交通拥堵问题已成为制约经济发展、降低人民生活质量的瓶颈之一.如何准确计算交通堵塞下车辆排队长度以及交通延误(消散时间),将是交通拥堵研究的重要内容.
1986年MORALES[1]提出利用到达率和离去率曲线估计事件引起的总延误的确定性排队论模型:假设到达率和离去率是不变的确切值.该模型更多地用来分析交通流状况,对交通状况的实时估计不足;2000年隽志才等[2]应用交通流流体力学理论建立了准冲击波模拟模型,该模型适用于拥挤流状态下的车流运行状况,最大排队长度误差在10%左右;2004年王晓原等[3]提出基于安全间距的车辆跟驰算法计算队长,该方法简单实用,但对司机的主观性考虑不多;2007年COMERT等[4]提出采用标记车辆对队长进行实时估计,该方法不适用于车辆到达分布未知的情况;2009年郑黎黎等[5]建立了交通事件排队长度和延误模糊预测模型,主要分析了事件发生期间交通流量、通行能力和事件持续时间的模糊度变化对排队长度和延误预测结果的影响;2012年丛浩哲等[6]在传统密闭道路集散波模型的基础上,提出了考虑汇入汇出匝道及衔接道路的路网事件辐射范围预测模型,该模型在初始流量较大的情况下,队长、波速、通行能力误差较大;2014年沈振乾等[7]提出基于连通区域的车辆排队长度检测算法,并给出了基于路口停车线的摄像机快速标定方法,该算法队长在120 m以内时,误差约为8%,当队长大于120 m时,误差变大;2014年王力等[8]基于混合逻辑动态MLD方法建立了出口匝道与辅路及下游交叉口信号的协调控制模型,分别研究了出口受控与不受控2种情况下基于MILP的MPC控制方法,并给出了当量排队长度表达式.
本文综合比较车流波动理论、跟驰理论、排队论、流体力学等方法后,以波阵面为切入点,基于车流波动理论、跟驰理论,提出采用波阵面的运动轨迹来描述队长变化的思想,并给出了计算模型VQLM——利用车间距、交通流速得到交通波集结消散节点函数,以节点函数计算队长,进而周期迭代获得任意时刻下的排队队长,以期为交通管理部门缓解交通拥堵提供及时、准确的决策依据.
第1节基于基本通行能力建立了道路通行能力描述函数,并定义了能反映道路通行能力综合影响程度的通行强度;第2节分析了车队起动过程和停车过程中的车辆运动学特性,建立了车流波动理论和车辆跟驰理论,阐述了车辆运动的复杂性和队长变化的本质;第3节分析了交通事故下车辆的排队过程和波阵面运动轨迹的复杂性,基于交通流理论、交通波集结消散节点函数、下一周期头车到来时事故路段队长的消散情况,推导了描述强拥挤交通流的车辆排队长度动态模型VQLM,并对排队过程中的各种情况做了解释说明;第4节针对视频数据的“近大远小”特性,构造了以标准当量车为参考,多次迭代以获取实际队长的标定方法;第5节对VQLM中的参数进行了标定和求解;第6节对论文所取得的进展和创新进行了总结,并提出了需要进一步探讨的问题.
1 道路通行能力的数学描述
道路通行能力是指道路的某一断面在单位时间内所能通过的最多车辆数,是道路和交叉口规划设计和组织交通的重要依据.鉴于城市交通流密度大、连续性强,以下将从理论和实际通行能力2个层面进行分析.
1.1 基本通行能力
不考虑实时路况的道路通行能力为理论道路通行能力,则单一车道在单位时间所能通过的最大交通流为
(1)
式中R0为基本通行能力(PCU·h-1),De为连续车流平均车头最小时距(s),D0为连续车流平均车头最小间隔(m),V为限制车速(km·h-1).
当以最大车流量行驶时,车辆保持的安全时距D0,包括司机发现前方有车时的反应距离、刹车距离、停车时的安全距离和车本身的长度.即
D0=Df+Ds+Da+Dl.
整理可得

(2)
1.2 实际通行能力
实际通行能力是在实际道路和交通条件下的通行能力,因交通事故、路边停车、占道施工、天气情况等客观因素会影响车辆通行能力.其中,在自然状态下,车道宽度、交通组成、个体因素对道路通行能力的影响最为显著.实际通行能力Rs描述如下:
Rs=(η·c0·cj+Δc)R0,
(3)式中,η为车道宽度影响系数;c0为道路的交通组成影响系数;cj为个体因素(如变道,司机间相互影响系数等),取0.95;Δc为其他因素,一般都很小.
1.2.1 车道宽度影响系数η的确定
车道宽度对行车速度有很大的影响,在城市道路设计中,标准车道宽度为3.5m.当车道宽度大于该值时,有利于车辆行驶,但宽度很大时由于受到本身性能的限制,车速也不可能大幅度升高.车道宽和车速之间呈下陡上缓的曲线关系[10].
(4)
式中,w0为车道宽度.
1.2.2 交通组成影响系数c0的确定
考虑交通组成以及各车型的车辆折算系数,通行能力修正系数:
其中,pi为车型i的交通量占交通总量的百分比;Ei为车型i的车辆折算系数.
令c=(η·c0·cj+Δc)为道路通行能力影响因子,它能更加真实具体地反映对道路通行能力的综合影响程度.因此,可以得到道路实际通行能力
Rs=c·R0.
(5)
2 交通波、车辆跟驰理论简述
2.1 交通波
由一辆一辆汽车组成的交通流类比于可压缩的流体,把车流密度的变化抽象为车流波,即交通波.在交通流中,交通波的变化如同流体中波纹的运动轨迹.
1934年,GREENSHIELDS等[11]建立了下列关系式:设交通波自由流流速为uf,结合交通流质量守恒定律,则
(6)
式中v1、v2分别表示波阵面S上、下游车速,k1、k2分别为波阵面S上、下游的交通密度,W为交通波波速.
2.1.1 停车波(集结波)
如果车辆行驶到x=x0处,因红灯停车,此时车流呈现饱和状态k2=kj.而波阵面S上游车流密度仍为k1,其示意图如图1所示.

图1 停车波示意图Fig.1 Schematic diagram of working principle of stop-wave
式(6)变为
W1=-ufη1,
(7)
表示停车产生的波以ufη1的速度向反方向传播,在x0红灯时间,一列长度为ufη1的汽车停排在x0之后.
2.1.2 启动波(消散波)
如果在t=0时刻,已经有一列车队停在信号灯交叉口入口引道停车线x=x0处,显然此时波阵面S上游车流密度k1=kj.当t=0时,信号灯转为绿灯,车辆以速度v2启动,相应的有一个象征发车的交通波(启动波)从前向后传播,见图2.

图2 启动波示意图Fig.2 Schematic diagram of working principle of start-wave
则式(6)变为

(8)
表明启动波以uf-v2的速度沿车队从前向后传播,负号表明波的传播方向与车队的运行方向即v2的方向相反.由于车辆刚刚启动,车速v2一般很低,在研究中往往把启动波波速以-uf的速度向后传播.
考虑到q=w·k,联立式(8),可得

化简可得
2.2 车辆跟驰理论
车辆跟驰理论的研究对象为非自由运行状态的行驶车队,它更强调每辆车的个体状态过程.在道路上,当交通流密度很大、车辆间距较小时,车辆间的特性如下:同向道路上,后车速度和前后两车相距的距离受到前车行驶速度的制约;当前车改变运行状态时,后车也要做相应改变,但后车滞后于前车;一旦第1辆车运行状态改变,它产生的效应将会一辆接一辆地传递下去,直到最后一辆,这种传递如脉冲一样.
其数学描述如下:在交通稠密的情况下,因前后车辆间隔较小,驾驶员无法超车,必须紧跟前面的车辆缓慢行驶.假设在t0时刻跟随车n+1与领头车n之间保持一段距离s(t),以便在前车n刹车时能使跟随车停下并且不发生追尾.设跟随车驾驶员在反应时间τ内,车速不变.则这2辆车“反应-刹车-停止”的运动过程如图3所示.

图3 车辆跟驰理论运动示意图Fig.3 Movement of the vehicle-following theory
s(t)为2辆车在t0时刻的距离;d1为后车n+1在反应时间τ内行驶的距离;d2为后车n+1在减速期间行驶的距离;d3为前车n在减速期间行驶的距离;L为停车后的车头时距,亦即安全距离.
假定前后车辆制动性能一致、车速一致,d2=d3,那么在t0+τ+Δt时刻,两车不发生碰撞的等量关系为:

(9)

对式(9)中t0求微分、变量代换,得

(10)


(11)
其中,l为车头间距指数,m为速度指数.
3 车辆排队长度的动态模型(VQLM)
3.1 问题描述与分析
对于单向3车道,当发生交通事故而占用2条车道时,由于第3条车道的通行能力不能满足上游车流所需,因此很容易造成交通拥堵.基于上游车流量受上游交叉口信号配时的影响,事故截面排队车辆如果在一个周期内没有及时消散,那么当上游车流到达时,排队将进一步向上游延伸,甚至达到上游交叉口,导致上游交叉口交通拥堵.如果不及时解决,交通拥堵区域将向四周蔓延,进而形成多方位的多米诺现象.
发生交通事故时,事故截面上下游车流密度不同,因此形成了波阵面S,相应地集结波自波阵面向上游传播.由于交通事故并未占用所有车道,因此在波阵面处还有向上游传播的消散波.当消散波追上集结波时,排队消亡.由于上游车流的不确定性,导致车流密度的无规律性,进而致使波阵面出现不规律的周期性变动,周期性是信号配时的缘故.如何准确有效地确定波阵面,将是模型研究的重点.
3.2 车辆排队动态模型

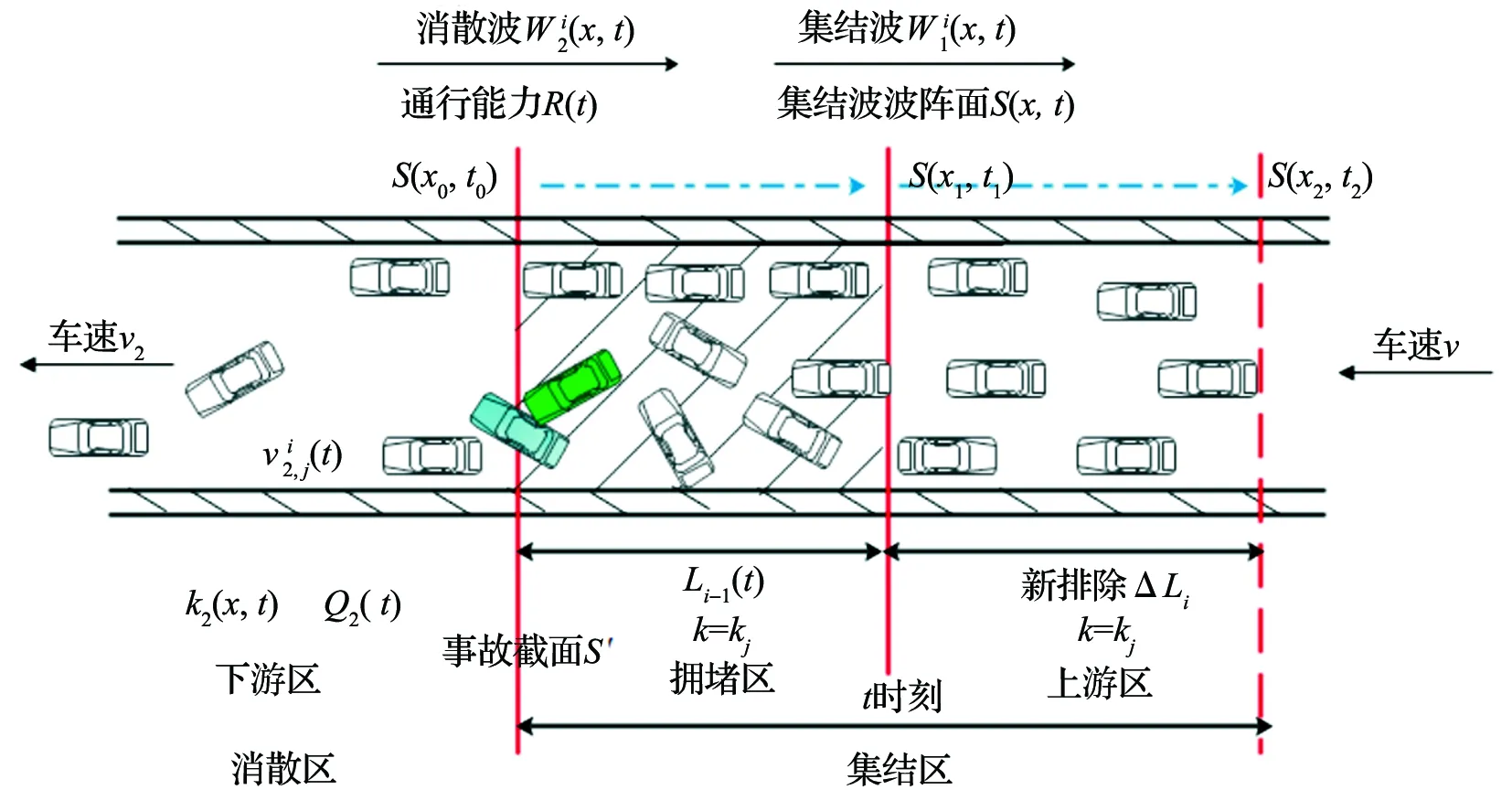
图4 动态模型中各参数示意图Fig.4 Diagram of the parameters in VQLM
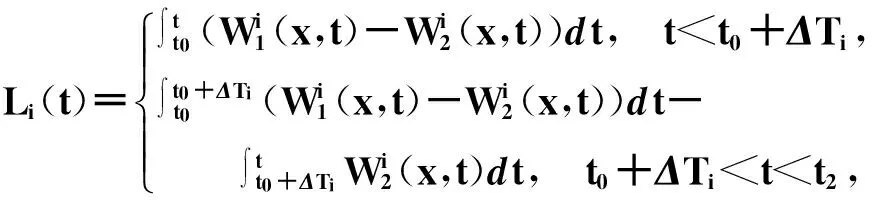
则第i个周期下时刻t对应车辆排队长度
(12)
其中:m为当前周期数;t0为当前研究起始时刻(一般取0);ΔTi为第i个周期下集结波集结完毕所花的时间;T1为事故持续时间,T2为事故排除到队长消亡的时间.
3.2.1 情形1(Li-1(t)=0)
其中,t2为下一周期车流的头车到达队尾所需的时间.
3.2.2 情形2(Li-1(t)≠0)
若Li-1(t0)≠0,则新的车辆排队长度由t时刻下事故截面排队长度Li-1(t)和来自上游交通流量Q1(t)引起的排队ΔLi(t)两部分组成.如何快速有效地确定波阵面S,进而确定上游密度K1(x,t)将是本节探讨的主要内容.
设事故截面S′距上游交叉口L;t时刻下,上游车流头车距事故截面x(t),距排队尾端Δx(t).在前方没有障碍物时,车辆以速度v0匀速行驶.当x(t)=xs时,司机意识到前面有车辆,开始做出反应,此时记为t1,历时Δt;当t=t2时,头车到达排队尾端,随即加入排队行列,相应的后车重复头车的动作加入排队行列;当t=t3时,所有后车完成排队动作形成新的排队.以事故点为原点,车流反方向为车辆排队长度x轴正方向,事故截面S′为时间轴t,建立如图5所示的坐标系.
对于头车n,其运动包含两部分:匀速运动和变减速运动.设头车变减速运动的加速度为a1(t),则有
(13)
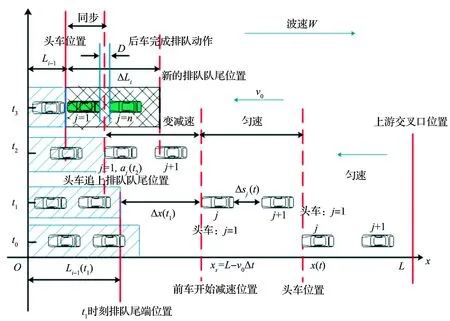
图5 上一周期排队未消散车辆排队运动示意图Fig.5 Diagram of the parameters in the model of case 2
根据车辆跟驰理论,可以求出所有后车完成排队动作的时间ΔT=t3-t2,此时间就是集结波波速传播的时间.接下来排队的消亡由消散波(亦即启动波)来完成.
设t时刻下,第j辆车和第j+1车之间的间距为Δsj(t),在t2时刻领头车的车速为v1(t2),则

整理后,得到第j辆车完成排队动作的时间


结合车辆跟驰理论式(9)、(10),可得所有后车完成排队动作的时间.
(14)
综上,第i个周期下时刻t对应车辆排队长度
(15)
其中:t0为当前研究起始时刻(一般取0),t2为下一周期车流的头车到达队尾所需的时间,ΔTi为第i个周期下集结波集结完毕所花的时间,T1为事故持续时间,T2为事故排除到队长消亡的时间.
4 基于视频的特定区段真实长度还原
鉴于视频数据存在“近大远小”的视觉特征,这是对真实路段的模糊不完整.因此对视频中实际队长的还原,可以采用数字图像处理技术将灰度与边缘检测相结合来检测队列长度[13].本文提出以标准当量车为参考,多次迭代以获取实际队长的标定方法.
选取上述模型原点O处的一辆大车(以公交车为例),车长记为Dl(已经知道其真实数值),其视频中长度记为Sl;在距离事故截面x后该车在视频中的数值记为Sl(x),所对应的真实数值记为Dl(x).则根据简单的比例关系(Dl不随视觉拍摄特征“近大远小”的变化而变化),可知视频中离事故截面S′相距x处Dl的真实长度为

示意图见图6.

图6 视频数据还原原理图Fig.6 Schematic diagram of the data restoring
相应地,对于视频中特定区段Δx,其真实长度为
(16)
相较于通过相邻帧差法[13-14]、两步法[15]、背景差法[16]、纹理法[17]等还原视频数据(主要为队长)的方法,本文提出的标定方法避免了视场角、边缘检测、数字图像处理等较为复杂的计算和推导过程,具有计算简单、数据获取方便等特点,计算误差来源于视频长度Sl(x)获取的精确性.
5 模型验证
5.1 参数标定
5.1.1 自由流流速uf与堵塞密度kj
根据城市交叉口交通流参数的标定方法[10],可知自由流流速的计算公式:
uf=r·s·η·v0,
(17)其中:r为自行车折减影响系数;s为交叉口影响系数;v0为路段设计车速(km·h-1);η为车道宽影响系数.
由于车道宽是交叉口下游事故截面车辆拥堵问题的主要影响因素,故这里仅考虑η,计算方法详见式(4).根据《中华人民共和国道路交通安全法》第二十条:道路同方向划有2条以上机动车道的,没有限速标志、标线的,城市道路最高车速不得超过60km·h-1,即v0=60km·h-1.
相应地,道路堵塞密度为

5.1.2 数据处理与求解
基于2013年全国大学生数学建模竞赛a题视频[18],本文从绿灯开始以1/6个信号周期为时间间隔统计当量车辆数[19].统计方法:电瓶车(0.5PCU),小轿车(1PCU),中型车(1.5PCU),大型车(2PCU),统计时算上小区车流量.
利用模型1,计算每个时间点事故截面S′处的通行能力并进行拟合,拟合度70%左右.结果如下:
R(t)=

利用模型2,消散波波速为

5.2 模型验证
任取起始时间段(结果取整数,以1/6个信号周期为时间间隔):
(1)Li-1(t0)≠0且Li-1(t2)=0:起始时刻为16∶42∶48,排队长度动态表征模型为
L(t)=Li-1(t0)-

其初始排队长度为108m,模型和实际变化见表1.
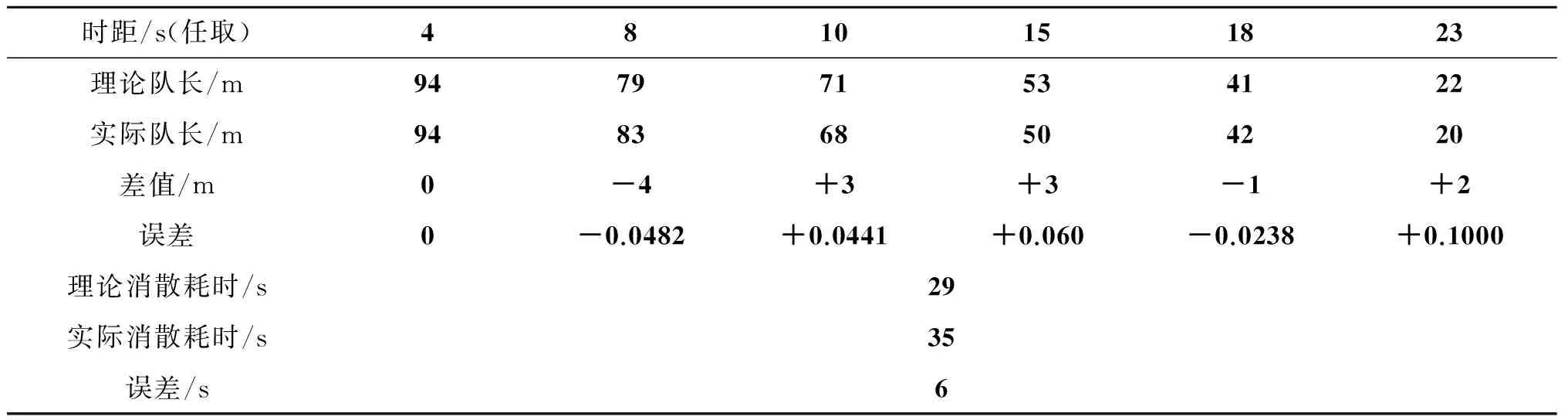
表1 起始有排队且下一周期头车到来时无排队Table 1 Queue in the starting point and the queue died when the first vehicle arrived in the next cycle
(2)Li-1(t0)=0,Li-1(t2)=0且t0≤t≤t0+ΔTi,起始时刻为16∶47∶31,排队长度动态模型为

集结波结束时间可由模型2求出,t0+ΔTi=25 s,t0取0,其模型和实际的变化如表2所示.

表2 起始无排队且下一周期头车到来时无排队Table 2 No-queue in the starting point and the queue died when the first vehicle arrived in the next cycle
(3)Li-1(t0)=0,Li-1(t2)=0且t0+ΔTi≤t,起始时刻为16∶47∶56,排队长度动态模型为

其模型和实际的变化如表3所示.

表3 起始无排队且下一周期头车到来时无排队Table 3 No-queue in the starting point and the queue died when the first vehicle arrived in the next cycle
(4)Li-1(t0)=0且Li-1(t2)≠0:起始时刻为16∶50∶27,排队长度动态模型为
尾车完成排队动作所花时间t3=24 s(可由情况2模型求出),模型和实际情况如表4所示.
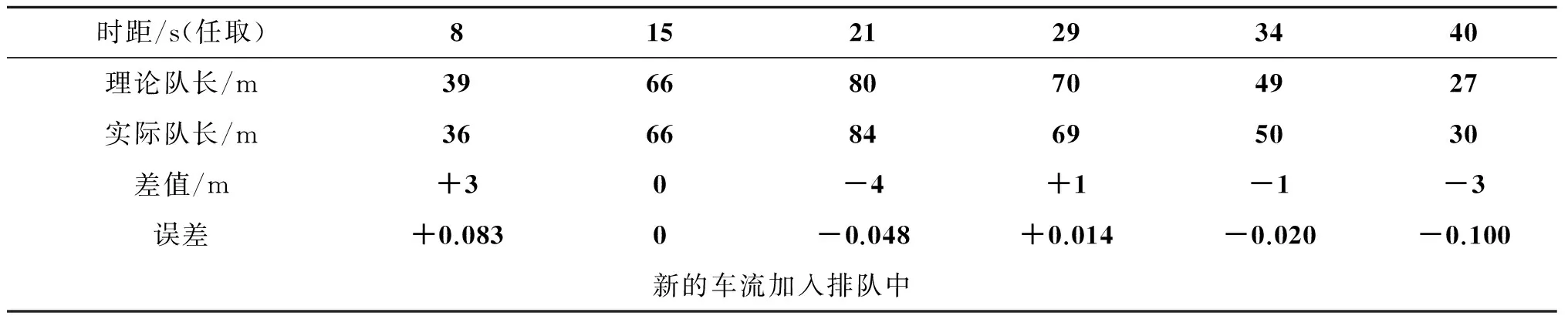
表4 起始无排队且下一周期头车到来时有排队Table 4 No-queue in the starting point and the queue survived when the first vehicle arrived in the next cycle
注 起始时刻队长为12 m,计算结果均加入12.
(5)Li-1(t0)≠0且Li-1(t2)≠0:起始时刻为16∶53∶21,排队长度动态模型为:
其初始排队长度为67 m(可由上一周期的模型计算得出);周期i内集结波结束时间t0+ΔTi=16 s(可由情况2模型求出);周期i+1内集结波结束时间t0+ΔTi=12 s;其模型和实际情况如表5所示.

表5 起始有排队且下一周期头车到来时有排队Table 5 Queue in the starting point and the queue survived when the first vehicle arrived in the next cycle
注 此时间段内有大型车辆以及小区车辆汇入.
从模型验证结果来看,VQLM模型的时间选取具有任意性,队长实时动态性效果较好,平均队长误差为-3.029%,宏观表现为2辆当量车10 m内,延误误差7 s左右.VQLM模型误差主要来源于集结波结束时间t0+ΔTi(t)、时间节点函数——尾车完成排队的时刻函数t3(t)计算的准确性、事故截面通行能力函数Rs的真实性、标定方法Δx(x)计算的准确性以及司机的主观性等.
6 结 语
6.1 定义了道路通行能力强度是与车道宽、反应强度、车辆换道过程、车辆类型有关的一个函数;正确估算道路通行能力可为交通管理部门正确引导车辆行驶、审批占道施工、设计道路渠化方案、设置路边停车位和非港湾式公交车站等提供理论依据.
6.2 鉴于视频数据“近大远小”导致数据失真的特征,提出了以标准当量车为参考,多次迭代尽可能真实还原数据的方法;并以视频中标注的实际长度进行度量验证,吻合度达到100%(结果取整数),较传统比例尺计算方法更精确.
6.3 分析了交通事故下车辆运动的复杂性和队长变化的本质,综合比较车流波动理论、跟驰理论、排队论、流体力学等方法后,首次在队长计算领域提出采用波阵面的运动轨迹描述队长变化的思想,并给出了计算模型VQLM.较于单一采用车流波动或车辆跟驰或流动力学等理论计算队长的方法,VQLM模型具有以下优点:研究时间选取任意性;研究队长能实现实时动态性;研究过程引入了司机的主观性;VQLM模型验证较好:平均队长误差为-3.029%,宏观表现为2辆当量车10m内,延误误差为7s.研究结果表明:事故截面的通行能力仍然具有周期波动性特征,可以考虑采用周期函数似然描述;交通事故下,重型车辆的加入会进一步加快队长的延伸.
6.4 着重研究了交通事故下队长的动态变化以及计算方法.其中,节点函数还需考虑车辆间的相互关联、司机间的相互影响以确保节点位置函数的准确性;另外,VQLM并未对上游交叉口信号配时进行动态优化以缓解交通拥堵,这些将是VQLM模型中需要解决和研究的重点与难点.
[1] MORALES M J. Analytical procedures for estimating freeway traffic congestion[J].Public Roads,1986(2):55-61.
[2] 隽志才,魏丽英,李江.信号交叉口排队长度宏观模拟的自适应分析法[J].中国公路学报,2000,13(1):77-80.
JUAN Zhicai,WEI Liying,LI Jiang.An adaptive macro-simulation method on queuing length at signalized intersection[J]. China Journal of Highway and Transport,2000,13(1):77-80.
[3] 王晓原,隽志才,贾洪飞.基于安全间距的车辆跟驰模型研究综述[J].长安大学学报:自然科学版,2004,24(6):51-54.
WANG Xiaoyuan,JUAN Zhicai,JIA Hongfei. Summarization of car-following models based on security distance[J]. Journal of Chang’an University:Natural Science Edition,2004, 24(6):51-54.
[4] COMERT G, CETIN M. Queue length estimation from probe vehicle location and the impacts of sample size[J].European Journal of Operational Research,2009,197(1):196-202.
[5] 郑黎黎,丁同强,范海燕,等.高速公路交通事件影响范围的模糊预测[J].数学的实践与认识,2009(1):72-77.
ZHENG Lili,DING Tongqiang,FAN Haiyan,et al. Fuzzy forecast of incident incidence freeway[J].Mathematics in Practice and Theory,2009(1):72-77.
[6] 丛浩哲,王俊骅,童世鑫. 高速公路网络交通突发事件辐射范围预测模型[J].同济大学学报:自然科学版,2012,40(3):414-422.
CONG Haozhe,WANG Junhua,TONG Shixin. Prediction model of freeway network traffic incident radiation scope[J]. Journal of Tongji University: Natural Science,2012, 40(3):414-422.
[7] 沈振乾,苗长云,张芳.基于视觉的路口车辆排队长度检测方法[J].计算机工程,2014,40(4):218-222.
SHEN Zhenqian,MIAO Changyun,ZHANG Fang. Vehicle queue length detection method at intersection based on vision[J]. Computer Engineering,2014, 40(4):218-222.
[8] 王力,李志军,修伟杰,等.基于MLD-MPC的快速路出口与辅路协调控制[J].控制工程,2014,21(4):487-492.
WANG Li,LI Zhijun,XIU Weijie,et al. Signal coordination based on MLD model and MPC approach[J]. Control Engineering of China, 2014, 21(4):487-492.
[9] 龙晓伟,张恩杰,张青富.现代道路交通工程学[M].北京:交通出版社,2008:114-116.LONG Xiaowei, ZHANG Enjie, ZHANG Qingfu.Modern Road Traffic Engineering[M].Beijing: People’s Communication Press, 2008:114-116.
[10] 樊月珍.基于交通流的车辆动态路径诱导方法研究[D].北京:中国农业大学,2005.
FAN Yuezhen. Study on Dynamic Route Guidance Method of Vehicle Based on Traffic Flow[D]. Beijing:China Agricultural University,2005.
[11] GREENSHIELDS B D,BIBBINS J R,CHANNING W S,et al. A study of traffic capacity[J]. Highway Research Board Proceedings,1935(14):448-477.
[12] 曹宝贵.交通流复杂动态特性与交通拥堵问题研究[D]. 吉林:吉林大学,2010.
CAO Baogui. The Study on Complex and Dynamic Characteristics of Traffic Flow and Traffic Jams[D].Jilin: Jilin University,2010.
[13] 贺晓锋,杨玉珍,陈阳舟.基于视频图像处理的车辆排队长度检测[J].交通与计算机,2006,24(5):43-46.
HE Xiaofeng,YANG Yuzhen, CHEN Yangzhou.Vehicle queue length detection based on video image processing[J]. Journal of Transport Information and Safety, 2006, 24(5):43-46.
[14] 李秋林,何家峰.基于三帧差法和交叉熵阈值法的车辆检测[J].计算机工程,2011,37(4):172-174.
LI Qiulin,HE Jiafeng. Vehicles detection based on three-frame-difference method and cross-entropy threshold method[J]. Computer Engineering,2011, 37(4):172-174.
[15] SATZODA R K,SUCHITRA S,SRIKANTHAN T,et al. Vision-based vehicle queue detection at traffic junctions[C]//Proc of the 7th IEEE Conference on Industrial Electronics and Applications.Singapore: IEEE Press,2012: 90-95.
[16] 李卫斌,辛乐. 基于图像处理的车辆排队长度鲁棒检测算法[J].计算机测量与控制,2011,19(8):1810-1813.
LI Weibin,XIN Le. Robust detection of vehicle queue based on image processing[J]. Computer Measurement & Control,2011, 19(8):1810-1813.
[17] 王伟智,刘秉瀚.车辆排队长度自动检测新方法[J].中国体视学与图像分析,2006,11(3):216-221.
WANG Weizhi,LIU Binghan.A new method of automatic extraction in vehicle queue length[J]. Chinese Journal of Stereo Logy and Image Analysis,2006, 11(3):216-221.
[18] 中国工业与应用数学学会.2013年高教社杯全国大学生数学建模竞赛题[EB/OL].[2013-09-13].http://www.mem.edu.cn/problem/2013/2013.html.
China Society for Industrial and Applied Mathematics. The Contest problems for CUMCM-2013[EB/OL].[2013-09-13].http://www. mem. edu. cn/problem/2013/2013. html.
[19] 姚荣涵.车辆排队模型研究[D].吉林:吉林大学,2007.
YAO Ronghan. A Study on Vehicular Queue Models[D].Jilin: Jilin University, 2007.
Vehicle congestion from the perspective of wave front.
SHAO Jiang, HU Xiaoxiao, BAI Baogang, WANG Changhong, ZHU Chenjie, CHEN Junhua
(SchoolofInformationandEngineering,WenzhouMedicalUniversity,Wenzhou325035,ZhejiangProvince,China)
This paper studied the complexity of the vehicle motion and the essence of the dynamic vehicle queue length based on the traffic video data. According to the traffic flow wave theory, vehicle-following theory, hydromechanics theory, etc, the method based on the propagation of wave surface to describe the queuing process was applied, and a queue length calculation model named Vehicle Queuing Length dynamic Model (VQLM) was proposed. To reduce the error during the transformation from video to reality, we introduced a calibration method which adopted passenger car unit(PCU) to recover the reality by-recursire iteration. Preliminary results show that the VQLM is more accurate and pragmatic in calculating the vehicle queue length than other methods based on single theories. According to the experiments, the average vehicle queuing length error is reduced to -3.029% i.e., when the distance error is within 10 m (2 PCU which are both 5 m long ); The time error is 7 s (signal cycle length is 60 s).Moreover, VQLM accounts more about the subjectivity of the drivers, traffic intensity of the road and node-set function of traffic wave, etc.
traffic flow wave theory; traffic intensity; propagation of wave surface; queuing process; data restore

2015-12-15.
浙江省自然科学基金资助项目(LY13H180012);浙江省大学生科技创新活动计划项目(2014R413004).
邵 江(1994-),ORCID:http://orcid.org/0000-0001-6022-4194,男,本科,主要从事交通流特性、信号分析、数学应用研究,E-mail:shaojiang41@163.com.
*通信作者,ORCID:http://orcid:org/0000-0003-1866-0413,E-mail:smallapple12345@163.com.
10.3785/j.issn.1008-9497.2016.04.016
O 175;U 121
A
1008-9497(2016)04-481-11
Journal of Zhejiang University(Science Edition), 2016,43(4):481-491
猜你喜欢
工会博览(2022年33期)2023-01-12
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
疯狂英语·新阅版(2019年8期)2019-09-10
扬子江(2019年3期)2019-05-24
中国交通信息化(2018年1期)2018-06-06
中国交通信息化(2017年7期)2017-06-06
军营文化天地(2017年12期)2017-03-01
军营文化天地(2017年7期)2017-01-02
电影故事(2016年5期)2016-06-15
