HXJ135C海洋修井机吊装和拖航设计
2016-06-28 16:08周洪军杜汉文
天津科技 2016年6期
周洪军,丁 辉,杜汉文
(中海油能源发展装备技术有限公司 天津300452)
HXJ135C海洋修井机吊装和拖航设计
周洪军,丁 辉,杜汉文
(中海油能源发展装备技术有限公司 天津300452)
海洋修井机建造完成后需要进行陆地组装,并通过船舶运输至相关海域开展吊装作业。而海洋修井机各组件都是复杂的大型金属钢架结构,质量大且载荷分布不均匀,并安装有各种机械设备,不能承受冲击和碰撞,给吊装和拖航造成较大困难。因此,在对海洋修井机进行海上运输吊装时,在复杂海况下的惯性力和其他环境载荷作用下,可能会对拖航、吊装的安全性和设备造成影响。以HXJ135C海洋修井机为例,结合相关标准规范、力学理论等,利用有限元软件,对码头吊装、拖航进行方案设计,旨在为项目提供支持。
海洋修井机 吊装 拖航 校核
0 引 言
目前,海洋修井机通常在陆地码头完成下底座、钻台上底座、井架的组装后,再与其他附件吊装至驳船进行加固,并运输至指定平台。海洋修井机各组件都是复杂的大型金属钢架结构,质量大且载荷分布不均,并安装有各种机械设备,不能承受冲击和碰撞。这给吊装和拖航过程带来了较大难度,需要根据各部件参数,制定合理规范的吊装和拖航方案,以满足工程实际要求。
HXJ135C海洋修井机组装完成后3大件的外形尺寸和重量清单如表1所示。
利用结构基本载荷数据,结合相关力学理论和标准规范,对整体结构进行简化分析,并对关键部位进行仿真校核,能够得到与实际较符合的结果,缩短了整体建模分析的时间。
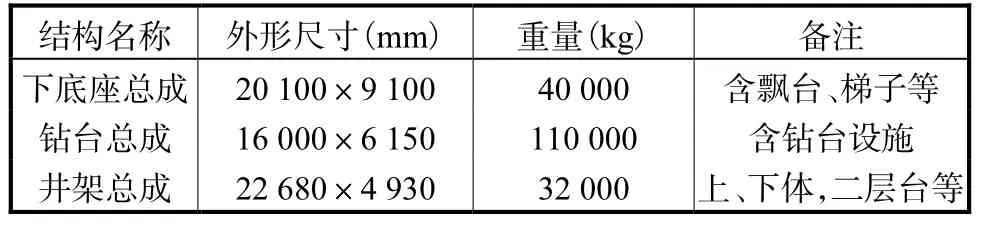
表1 海洋修井机3大件外形尺寸及重量清单Tab.1List of dimensions and weights of marine drilling rig’s three major components
1 吊装方案设计
1.1 井架总成吊装
HXJ135C海洋修井机选用HJJ13533C型井架,由井架上体、井架下体、二层台等附件组成。组装完成后,井架上体完全缩回并由锁紧销固定。4处吊耳的位置分别位于井架下体2根结构立柱上,查阅井架三维模型的重心位置,仍在井架框架内部,近似可认为在几何形心位置,可利用井架本体吊点进行吊装。
1.2 吊装力学计算
3大件吊装均选用四肢钢丝绳(见图1),钢丝绳实际受力为:

Φ36.5×14,000,mm钢丝绳的破断拉力为:666.5,kN,钢丝绳容许拉力:[1]

式中:a为钢丝绳之间载荷不均匀系数,6×19钢丝绳取0.85;为钢丝绳的钢丝破断拉力总和(kN); K为钢丝绳使用安全系数。
由上述可知,2P>1P,钢丝绳型号完全能够满足使用要求,卸扣采用额定载荷为21,t的高强度卸扣,销轴直径为39,mm。
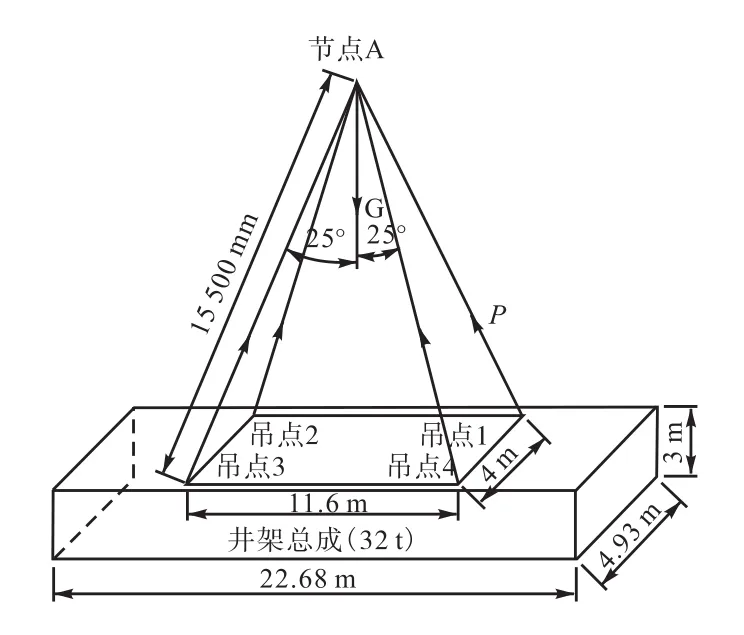
图1 井架总成吊装受力分析Fig.1 Force analysis of derrick assembly hoisting
1.3 吊耳强度校核
选取吊点2计算校核结构强度。吊耳处受力最大为127.3,kN,吊耳材质为Q345B(δ30,mm),索具长度为14,m,吊装角度为63.63 °。利用CAD自带有限元功能模拟得到图2所示结果。[2]
根据受力分析可知:吊耳处承受的最大力为115.16,MPa。Q345B(δ=30,mm)屈服强度为325,MPa,低于材料的屈服应力。因此,井架的吊耳强度满足吊装要求。
安全系数为:

运用此方法可确定钻台总成、下底座总成的吊装钢丝绳及卸扣规格型号(见表2)。
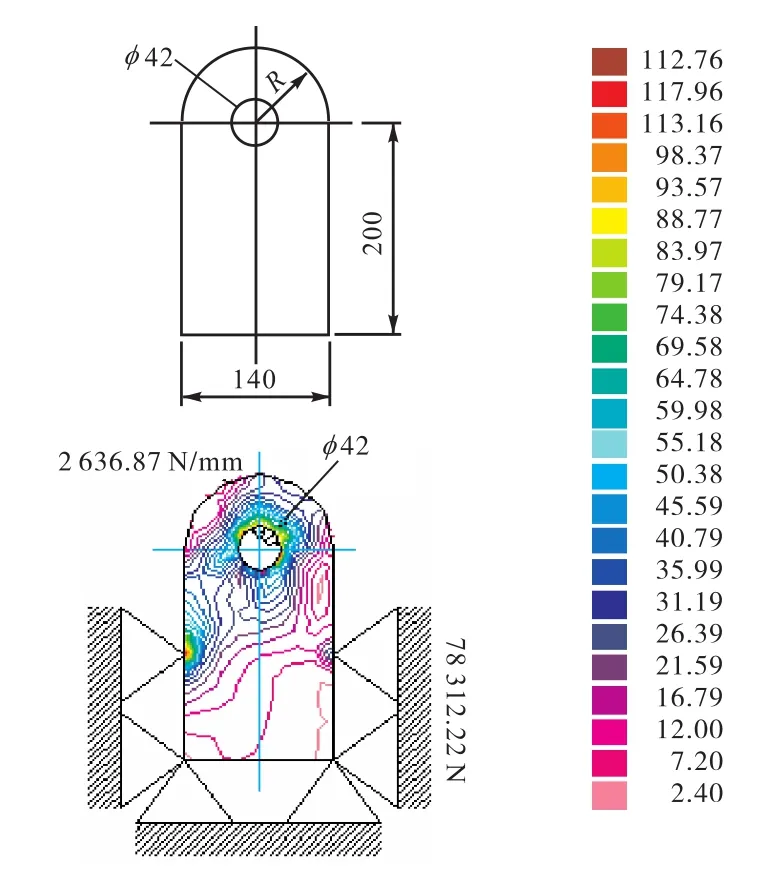
图2 吊耳处应力分布图Fig.2 Stress distribution in hanging ear

表2 下底座/钻台总成吊装索具卸扣选型Tab.2Parameters of hoisting gear shackles on bottom base & drilling floor assemblies
2 拖航方案设计
2.1 惯性力概述
修井机在陆地建造完后,大多采用驳船固定运输至指定平台。在运输过程中,结构件会随着驳船在波浪作用下产生运动。船体的运动形式有:横荡、纵荡、升沉、横摇、纵摇、平摇。前3种形式的运动为船体的平动,后3种运动形式为船体沿本身运动中心的转动。这些运动均会产生加速度,从而使其装载的结构物产生与加速度相反的惯性力。根据刚体平动和转动理论,惯性力等于平动惯性力、转动切向惯性力在坐标轴分量、转动法向惯性力沿坐标轴的分量之和。[3]
2.2 设计参数
HXJ135C海洋修井机使用“ZR1501”号驳船完成拖航,具体参数为:船长120,m,船宽30.5,m,船深7.6,m,排水量3,636,t。
2.3 拖航风载
拖航分析中应选取重现期为10年、持续时间3,s的平均风速,并且按照《API RP 2A-WSD海上固定平台规划、设计和建造的推荐作法——荷载和抗力系数设计法》中的规定计算模块钻机所受风力(见表3)。
风速:Vw:31.1,m/s
形状系数:Cs:1.0
高度系数:Ch:1.32
根据API Spec 4F,建筑物高于水平面大约0~15,m,Ch=1.2,高度每增加15,m,高度系数增加10%。
风载计算公式:

2.4 结构分析
2.4.1 拖航工况
HXJ135C海洋修井机共分为3大模块,运输时固定在ZR1501驳船甲板上,摆放位置如图3所示;运输时由于纵摇和横摇,3大模块存在滑移和倾覆的可能性,固定时应该从阻止模块从X方向和Y方向滑移和倾覆两种可能性上考虑。泥浆泵和泥浆泵动力橇为整体设备,尺寸和吨位较小,因此不对其进行计算分析,只针对3大模块进行计算分析。
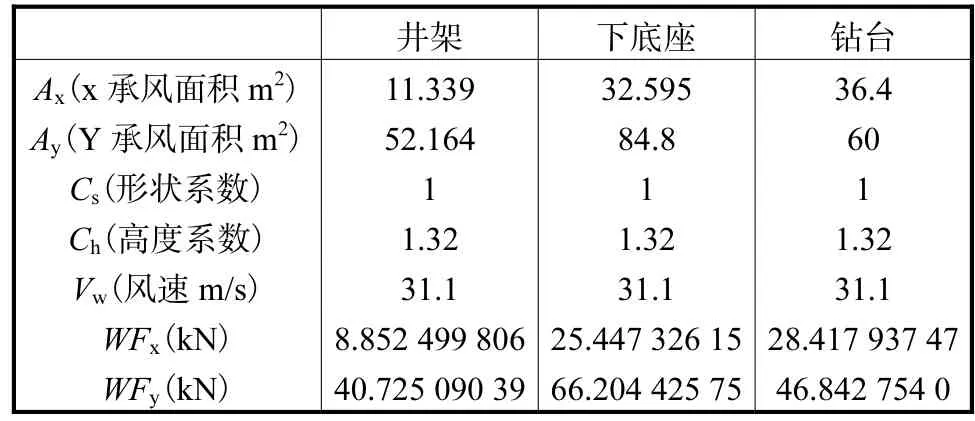
表3 筑物高于水平面Tab.3Wind load calculation results of three major components of workover rig
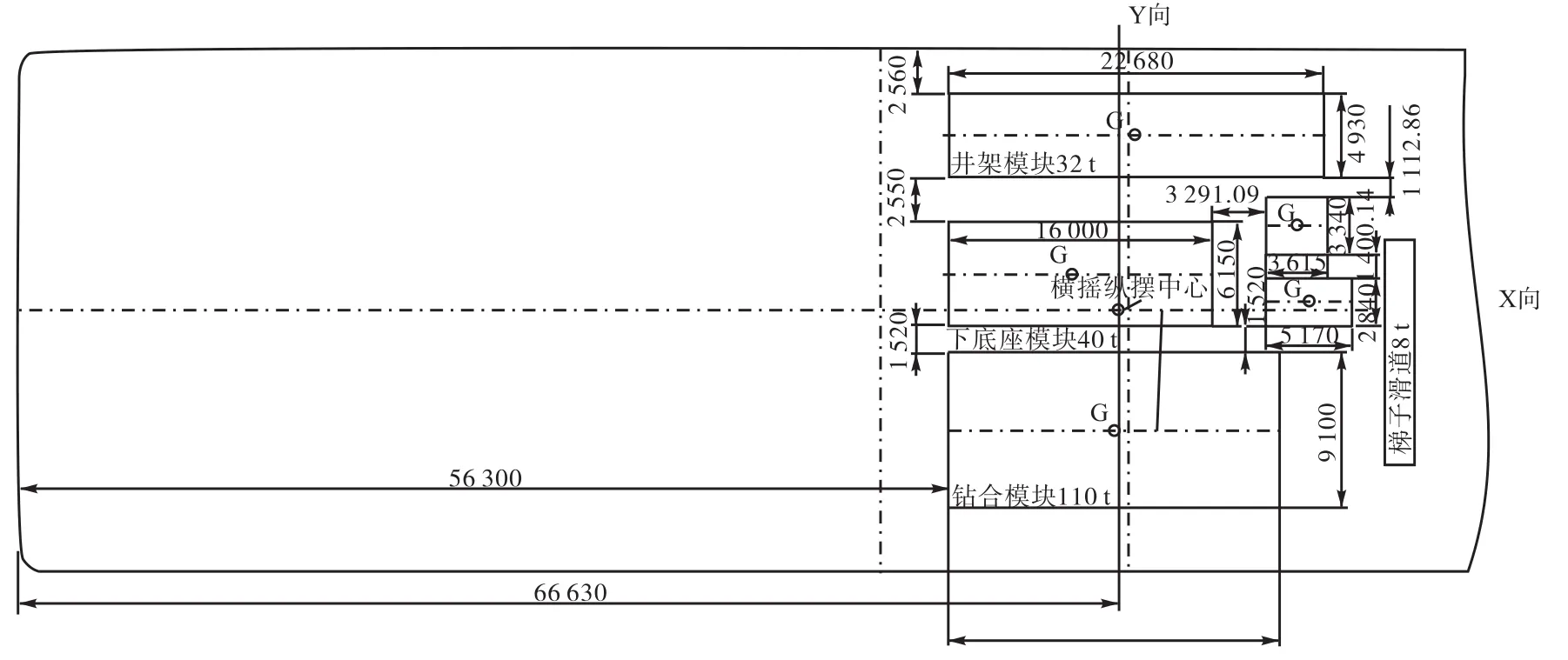
图3 驳船摆放图Fig.3 Layout of the barge
2.4.2 横摇和纵摇中心
以驳船拖航时的横摇和纵摇中心为坐标原点,根据拖航示意图,可计算得到修井机各模块重心相对拖航时纵摇横摇中心的三坐标及摇摆半径如表4所示:

表4 以横摇和纵摇中心为原点的相关参数Tab.4 Parameters of center of gravities of the three major components of workover rig
2.4.3 驳船拖运时参数
风载方向示意图如图4所示,参数见表5:
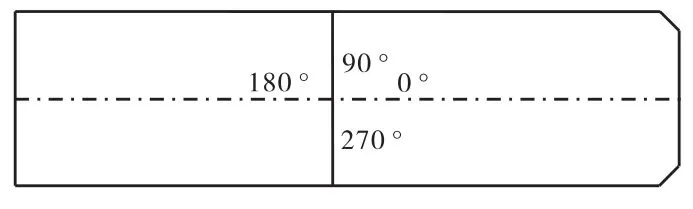
图4 风载方向示意图Fig.4 Sketch map of wind directions

表5 拖运时参数Tab.5Towing parameters of the three major components of workover rig
2.4.4 角加速度计算
横摇角度(roll):Ar=20deg ;周期:Tr=10sec
纵摇角度(pitch):Ap=10deg ;周期:Tp=10sec
升沉加速度:ah=0.2g
重力加速度:W=1.0g
2.4.5 拖航力的计算
根据拖航工况,纵摇和横摇产生的力计算如下,计算公式及其符号如下:
2.4.5.1 横摇产生横向的力(Y方向)
重力加速度Y方向分量:FTRrs=W×sin(Ar)
横摇加速度Y方向分量:FTRrd=W×εr×Rr/g
升沉加速度Y方向分量:

2.4.5.2 纵摇产生的横向力(X方向)
升沉加速度X方向分量:

横摇产生的横向力计算结果如表6所示(Y向):

表6 横摇产生的横向力计算结果(Y向)Tab.6 Calculation results of transverse force(Y direction)
纵摇产生的纵向力计算结果如表7所示(X向):

表7 摇产生的纵向力计算结果(X向)Tab.7 Calculation results of longitudinal force(X direction)
根据拖航工况,考虑横摇(R)、纵摇(P)、升沉(H)的各种工况组合,共分为8种工况,即:+R+H,-R+H, +R-H,-R-H,+P+H,-P+H,+P-H,-P-H。风载选取最恶劣工况,[4]具体计算数据如表8、表9所示:

表8 拖航工况组合(a)Tab.8 Towing condition combination (a)

表9 拖航工况组合(b)Tab.9 Towing condition combination (b)
2.4.6 3大模块重量
根据现场3大模块各部件重量清单,总重量如表10所示:

表10 修井机3大件重量清单Tab.10 List of weights of the three major components of workover rig
2.4.7 加固方案及受力分析
3大模块通过定位块和钢丝绳固定在甲板上,根据拖航工况及安装方案,运输过程中存在滑移和倾覆的可能,因此固定方案采用定位块限制滑移,钢丝绳拉紧3个模块防止倾覆的措施。
根据修井机拖航方案及上述计算可知,拖航时作用于3大模块的力简化为风力、横摇、纵摇及模块自身的重力;其中和Y方向的惯性力及风力远大于X方向的力,且修井机左右加固撑相同;因此,滑移校核只要分析计算横摇-升沉时Y方向一侧受力即可;由于3大模块属长方形模块,长边沿X轴方向布置,X方向所受的风力及惯性力远小于Y方向,因此只需校核Y方向不倾覆,X方向也是安全的。
2.6 抗倾覆校核
按照支撑位置和模块重心位置,井架模块可简化为长方形模块,长×宽×高为:22,680×4,930×2,300,重量估重为32,000,kg,固定方案模型简化如图5所示:
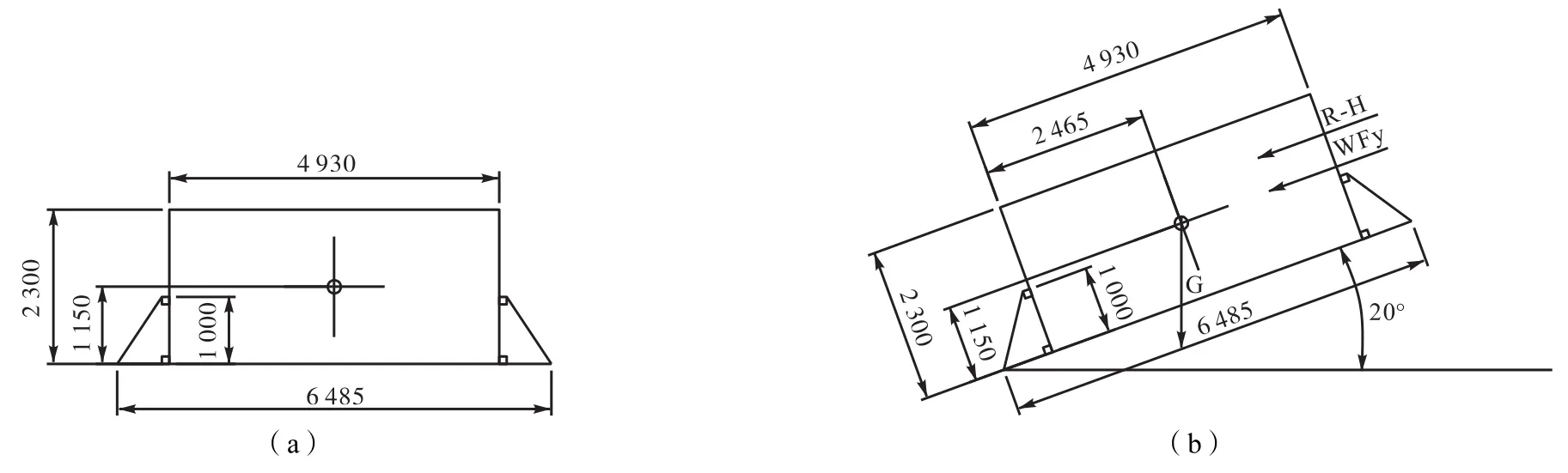
图5 井架撬块简化模型及分析Fig.5 Simplified model and analysis of derrick skid block
2.6.1 滑移校核
选取R-H惯性力,270 °风载的外加力,计算如下:
2.6.1.1 重力在滑移方向分力

惯性力在滑移方向作用力为:

2.6.1.1 滑移方向作用力

井架限位及固定时,单边设置4个定位块7,1个定位块8,并分析主要承受剪切力。

剪切应力取安全[σ]0.6倍
2.6.2 倾覆计算
由于在外力的作用下有倾覆的趋势,选取外力R-H,风载为270 °校核,如果在此位置不倾覆,则井架不存在倾覆的危险:
倾覆力矩:
重力分量的反力矩:
根据此法,可确定下底座总成、钻台总成惯性力,进一步校核在各种组合海况下,构件倾覆的可能性。经计算,均满足标准规范要求。
3 结 语
根据结构件特点,结合整体受力分析和吊耳有限元计算,确定了最佳的吊装方案。拖航设计结合环境条件和横摇、纵摇、升沉所产生的惯性力影响,分析整体倾覆可能,保证拖航方案的科学有效性。
HXJ135C海洋修井机吊装和拖航方案的确定为施工提供科学依据,按照此法圆满完成吊装和拖航任务,该海洋修井机已顺利就位并安装使用,得到业主的认可。■
[1] 张晓军. 井口管汇橇块整体吊装方案设计[J]. 石油矿场机械,2004,33(2):53-55.
[2] 刘鸿文. 材料力学[M]. 北京:高等教育出版社,2004.
[3] 哈尔滨工业大学理论力学教研室. 理论力学[M]. 北京:高等教育出版社,2009.
[4] 王宁,徐田甜. 西江23-1油田平台模块海上吊装优化设计[J]. 石油矿场机械,2007,36(8):26-30.
Design of Hoisting and Towing of HXJ135C Marine Workover Rig
ZHOU Hongjun,DING Hui,DU Hanwen
(CNOOC EnerTech Equipment Technology Co.,Ltd.,Tianjin 300452,China)
After the completion of the construction of marine workover rig,land assembly work is required,and the lifting operation will be carried out in designated sea area by ship transportation.As most components of marine workover rig machine have a large and complex steel frame structure,which features large deaload and uneven load distribution,and the rig machine is affixed with a variety of machineries and equipment,it is unable to bear impact and collision.As a result,its lifting and towing process is very difficult.Therefore,during the transportation and lifting of marine workover rig,the safety of towing and lifting of the machine and the machine itself may be affected by inertial force and other environmental loads when under complicated sea conditions.This paper takes HXJ135C marine workover rig as an example,designs a terminal lifting and towing scheme on the basis of relevant standards and mechanical theory by using finite element software,aiming to provide support for the project.
marine workover rig;hoisting;towing;check
TE935
A
1006-8945(2016)06-0070-05
2016-05-20
猜你喜欢
化工管理(2022年14期)2022-12-02
机床与液压(2022年16期)2022-09-19
石油机械(2022年8期)2022-09-14
船海工程(2021年1期)2021-03-02
化工设计通讯(2021年2期)2021-01-07
中学物理·高中(2019年8期)2019-09-20
科技创新与应用(2018年27期)2018-09-29
山东工业技术(2016年15期)2016-12-01
环球市场信息导报(2015年23期)2015-12-26
中国新技术新产品(2015年1期)2015-01-19