
基于多属性偏好的舰载机着舰风险决策方法*
2016-06-27 05:51杨巍巍张玉茹李晖张丽霞苏晓东姜海涛
桂林航天工业学院学报 2016年1期
关键词:优化模型
杨巍巍 张玉茹 李晖 张丽霞 苏晓东 姜海涛
(哈尔滨商业大学 信号与信息处理专业,黑龙江 哈尔滨 150028)
基于多属性偏好的舰载机着舰风险决策方法*
杨巍巍**张玉茹李晖张丽霞苏晓东姜海涛
(哈尔滨商业大学信号与信息处理专业,黑龙江哈尔滨150028)
摘要针对传统着舰指挥官(Landing Signal Officer, LSO)对舰载机着舰风险评估定量分析的不足,提出一种基于多属性偏好的舰载机着舰风险决策方法。定义了二维三角模糊数期望值,通过讨论已有属性权重选取的局限性,在期望值基础上,根据综合属性值和方案偏好值建立目标优化模型,计算得到属性权重,最终利用集结算子获得方案的排序,实现对有偏好舰载机着舰风险的评测。通过仿真验证了决策结果与实际落点分布情况一致,说明所提出的决策方法在舰载机着舰风险评测中应用的合理性和可行性。
关键词有偏好多属性决策;着舰风险;二维三角模糊数期望值;优化模型
航母舰载机已成为海洋作战的主要武器。由于高风险的工作环境,操纵舰载机安全着舰对于每一名驾驶员来说都是非常困难的。为了保证后续任务的顺利执行,比对当前不同驾驶员的操控能力或同一驾驶员不同航次的飞行状态,对着舰风险进行决策评估是非常必要的,既可以发现当前着舰过程中存在的问题,又可以帮助驾驶员快速提高操作技能、相互学习,为后续成功着舰奠定基础[1]。
多属性决策是指决策者为了达到某一目标,在两个或两个以上的具有多个属性的可行方案中选出一个较佳方案的分析判断过程。由于决策者自身经验有限及外界环境因素,决策者往往存在一定的偏好,而针对有偏好的三角模糊数多属性群决策越来越受到学者的青睐。Xu和Liu均研究了有偏好的三角模糊数多属性决策问题,以决策者的风险态度决定了决策结果的不同[2-3]。徐泽水利用了相似度和可能度的公式,根据以三角模糊数给出的属性值和方案偏好值建立规划模型,解决属性权重未知的决策问题[4]。但由于规划模型建立的不合理性,刘卫峰等人就其不足进行改进,并建立及计算合理的规划模型,获得属性权重[5]。
从评估舰载机着舰风险的角度出发,分别以LSO对舰载机着舰风险给出的评估信息和自动引导系统得到的飞行状态信息作为决策者的主观偏好值和方案的属性值,根据文献[4]对决策者的主观偏好值和方案的属性值建立优化模型的局限性进行分析,提出依据综合属性值和主观偏好值的有偏好多属性群决策,解决舰载机着舰风险评估中同一等级航次的优劣难于分辨和飞行姿态权重划分不合理的问题。
1问题描述
舰载机下滑着舰过程中,驾驶员需操控舰载机跟踪理想下滑道,实现最终的安全降落,其着舰控制系统模型如图1所示,作为后续着舰风险决策的模型基础。系统从舰载机着舰的位置和姿态进行控制,并提供飞行状态的信息[6]。

图1 舰载机着舰控制系统
自动引导系统和LSO同时对舰载机着舰进行引导和修正,帮助舰载机成功钩住阻拦索,并分别记录和评估舰载机的飞行状态信息。由于LSO经验、知识的有限,因此评估的信息会存有主观偏好。传统舰载机着舰的LSO等级评测[7-8],存在多种问题,很难分辨同等级航次的优劣和容易提供错误决策结果。而仅采用系统提供的数据又容易偏离专家期望的结果。
针对上述问题分析,有偏好多属性群决策既保留了LSO对舰载机着舰风险给出的评测信息,又可综合多个LSO因对舰载机着舰知识不同认识所提供的不同风险评测信息,免除了因个人因素带来的问题,同时能正确对多种航次的优劣进行决策。
由于舰载机着舰是非常复杂的系统,往往决策者/LSO给出的评估信息是模糊语言变量。本文根据LSO对风险的态度,计算LSO和系统记录信息的期望值,并根据LSO的主观偏好和综合属性建立优化模型,获得属性权重,集结到群体综合值,实现有偏好的多属性群决策对舰载机着舰风险的综合评测。
2相关知识

(1)
λ·(bU-bL)
(2)风险因子范围:-0.5≤λ≤0.5。在-0.5≤λ<0时,决策者对风险持消极态度;在λ=0时,决策者对风险态度是中立的;在0<λ≤0.5时,决策者对风险持积极的态度。
由区间数期望值定义原理,结合三角模糊数的期望值定义,获得基于二维的三角模糊数期望值定义。

a(α)=SOABH+α·SABC
(3)

图2 三角模糊数
其中α(0≤α≤1)为风险因子,其值取决于决策者对风险的态度。当α>0.5时,表示决策者追求风险;当α<0.5时,说明决策者厌恶风险;当α=0.5时,决策者对风险的态度持中立。

决策者(或LSO)针对舰载机着舰过程关键位置飞行状态给予模糊语言评估,并依据相应位置重要程度进行整个航次综合评估[7-8,12-13],其飞行效果描述及对应的三角模糊数形式为[1]:

根据定义3给出的公式,计算决策者的主观偏好和客观偏好的期望值,如下:
(4)
(5)
3决策方法
3.1问题分析
在文献[4]决策分析中,因种种条件制约的因素,决策者的主观偏好值与客观偏好值(属性值)往往有一定的偏差存在。为确使决策具有合理性,属性权重w的选取应使决策者的主、客观偏好值的总偏差最小,并建立下列单目标优化模型:

事实上,文献[4]提供的模型即M-1具有一定的局限性,导致最终获得的属性权重也不科学,为此,进行以下分析。
目前,解决模型M-1存在问题的方法,就是对上诉两个因素同时满足,则应该将方案与方案之间的整体评估或属性与属性之间的局部评估进行对比。

3.2决策方法
解此模型便可得到属性权重w(k)=(w1,w2,…,wn)。
根据以上叙述,基于有偏好的舰载机着舰风险多属性群决策的步骤如下:
④建立单目标优化模型M-2,并解此模型得到属性权重w(k)=(w1,w2,…,wn);

⑥对群体综合期望值进行比较,得到各飞行航次优劣的排序,选出风险最小,飞行最佳的航次。
4算例分析
由图1所示的模型进行仿真舰载机着舰过程,得到五组飞行航次在航母甲板上的落点分布(如图3所示),并进行决策计算以及分析验证。

图3 甲板着舰落点分布
四位着舰指挥官dk(k=1,2,3,4)根据舰载机着舰纵向的风险评估,对五组飞行航次xi(i=1,2,3,4,5)进行评测[6、12-13],跟踪引导系统对高度偏差u1、速度u2、下沉率u3三个飞行状态信息分别进行记录。决策者的权重为ω=(0.25,0.25,0.25,0.25),所有决策信息如表1所示。

表1 系统提供的决策矩阵
四位着舰指挥官对五组航次评测的主观偏好值见表2:

表2 dk对xi评测值
属性权重完全未知,若α=0.5,即决策者对风险具有中立的态度,则计算得到客观偏好期望值和主观偏好期望值如表3、4所示。

表3 系统提供的中对应期望值

表4 dk对xi的期望值
由此进行建立模型M-2,并对其求解,可得到不同决策者偏好下的属性权重及综合属性值,如表5和表6所示。
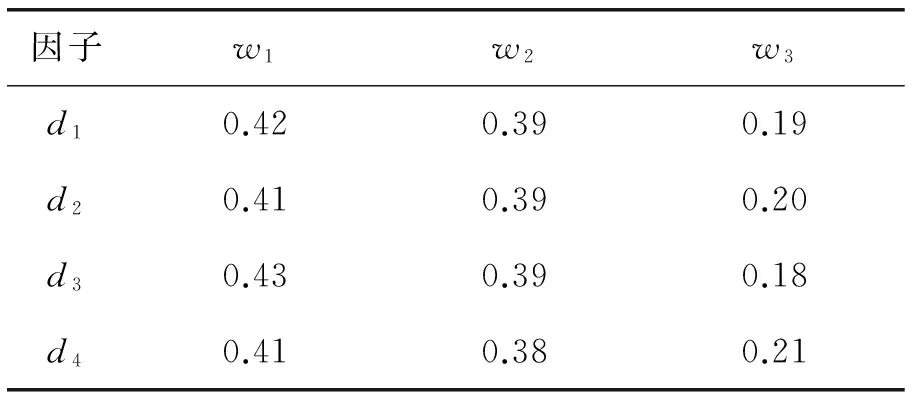
表5 属性权重

表6 综合属性期望值
针对四位决策者都有相同的经验和能力,即具有相同权重ω=(0.25,0.25,0.25,0.25),计算群体综合属性期望值,如下:
Z1=0.384 ,Z2=0.703 ,Z3=0.803 ,
Z4=0.581 ,Z5=0.261
根据群体综合属性期望值的大小进行排序
x3>x2>x4>x1>x5
可知,x3的值最大,即第三组飞行航次的风险最小,具有最优的飞行效果。由图3给出的几组航次落点分布可知x3的飞行效果最佳,且x3落在最佳着舰落点即为第二和第三根阻拦索之间,与决策结果一致,其他四组航次落点距最佳落点的远近进行优劣排序,与决策排序逐一对应。表明决策者给出的决策结果和引导系统获得的航次排序结果一致,证实了决策结果的合理性和可行性。其次,表5中各属性权重值与理论公式推导出的属性权重w=(高度偏差,速度,下沉率)=(0.4,0.4,0.2)T相符[1],验证了改进模型的准确性。
针对以往应用算例,客观偏好(属性值)也均由人进行评测,带有一定的主观意念。而在舰载机着舰风险中,属性值则是由跟踪引导系统提供,得到的属性值更加客观,系统与决策者的信息融合也更加体现出决策结果的正确性。所以,将有偏好的多属性群决策应用在舰载机着舰风险评估中是非常可行和实用的。
5结束语
首先,分析了多属性群决策与舰载机着舰风险评估结合的合理性,基于有偏好多属性群决策更有效地提高多组航次着舰优劣排序的准确性。其次定义二维三角模糊数期望值公式,该定义概念清晰且计算简单;并根据主观偏好期望值和综合属性期望值建立合理的单目标优化模型,弥补原模型的不足,确保了属性权重的正确性;最后,将多属性群决策应用在舰载机着舰风险评估中,表明了决策结果与落点分布相同,证实了决策方法的可行性。
参考文献
[1]朱齐丹,李晖,夏桂华,等.舰载机着舰风险动态多属性决策[J].哈尔滨工程大学学报,2013,34(5):615-622.
[2]徐泽水.对方案有偏好的三角模糊数型多属性决策方法研究[J].系统工程与电子技术,2002,24(8):9-12.
[3]刘满凤,宋颖.考虑决策者行为偏好的三角模糊数多属性决策方法[J].统计与决策,2014(9),44-46.
[4]徐泽水.基于期望值的模糊多属性决策法及其应用[J].系统工程理论与实践,2004,24(1):109-113.
[5]刘卫峰,何霞.一种对方案有偏好的三角模糊数多属性决策方法[J].模糊系统与数学,2013,27(2):155-161.
[6]Robert K,Heffley.Outer-loop control factor for carrier aircraft[R].USA.1990:12-45.
[7]NAVAIR 00-80T-104.NATOPS Landing Signal Officer Manual[S].US.2001.
[8]NAVAIR 00-80T-105. NATOPSLanding Signal Officer Manual[S].US. 2004.
[9]张市芳.几种模糊多属性决策方法及其应用[D].西安:西安电子科技大学,2012.
[10]文杏梓,罗新星,欧阳军林.基于决策者信任度的风险型混合多属性群决策方法[J].控制与决策,2014(3):481-486.
[11]兰蓉.模糊信息距离及若干应用[D].西安:西安电子科技大学,2013.
[12]王立鹏.舰载机着舰指挥官指挥策略研究[D].哈尔滨:哈尔滨工程大学,2012.
[13]王岩.舰载机着舰指挥官辅助决策及其评估[D]. 哈尔滨:哈尔滨工程大学,2013.
(责任编辑骆桂峰)
* 基金项目:黑龙江省自然科学基金项目《基于优势保有度的舰载机着舰风险动态多属性决策技术研究》(F201423)。
** 作者简介:杨巍巍,女,黑龙江哈尔滨人。硕士研究生。研究方向:信息融合与信息处理。
中图分类号:V219
文献标志码:A
文章编号:2095-4859(2016)01-0076-06
猜你喜欢
科技资讯(2017年7期)2017-05-06
中国教育信息化·高教职教(2016年12期)2017-04-15
商业经济研究(2017年5期)2017-03-23
现代电子技术(2017年1期)2017-02-16
价值工程(2017年2期)2017-02-06
无线互联科技(2016年13期)2017-01-10
企业导报(2016年20期)2016-11-05
江苏农业科学(2016年2期)2016-04-11
江苏农业科学(2015年11期)2016-01-27
