
磁流变液振动控制阻尼器在柔性机器人中的运用
2016-06-24 07:44崔广宇邹俊俊
现代制造技术与装备 2016年5期
崔广宇 冯 岩 邹俊俊
(西安铁路职业技术学院,西安 710014)
磁流变液振动控制阻尼器在柔性机器人中的运用
崔广宇 冯 岩 邹俊俊
(西安铁路职业技术学院,西安 710014)
摘 要:分析一种基于磁流变液的振动控制阻尼器在对柔性机器人关节振动的半主动控制,并将其与传统的主动控制及动态吸震器等方法相比,发现其具有在磁场作用下磁流变液固液相转换快速、连续、可逆性能强,能够根据振动情况快速、连续、可逆地调整阻尼力的特点。进行仿真分析与实验分析后,表明该阻尼器控制方法不但不会产生额外的振动,同时体积小、环境适应能力较强,且因其材料的原因,其内部提供的阻尼力连续可调、调整范围较大,具有较好的操作稳定性,在快速、柔性机器人振动控制中具有良好的技术应用前景。
关键词:变液振动 机器人 控制
1 传统柔性机器人振动控制方法
传统的机器振动控制系统主要可分为主动振动控制、被动振动控制和半主动振动控制。主动控制根据检测到的振动信号,经过计算驱动作动器向机械结构施加一定的影响,从而抑制或消除振动。被动振动控制就是由弹簧、质子和阻尼器等零件的往复运动来吸收、耗散频段内模态的应变能。而半主动控制是根据不同振动情况随时调整改变预先设置的被动吸振器中阻尼器或相应弹簧的特征参数,从而获得相对良好的工作环境,减少振动对系统的影响。半主动控制保留了主动控制的优点,且其能量耗费和系统构件复杂度也并未增加。
2 磁流变液振动控制阻尼器的控制方法与动力学模型
磁流变液振动控制阻尼器控制是在系统内部通电的情况下,随着阻尼器内部磁场的大小、有无等变化,磁流变液阻尼系数也随之改变的控制方法。在机器人运动的过程中,内圈转子剪切磁流变液,从而产生阻尼力,其大小受磁流变液材料及配比的影响。当机器能够作用于磁流变液的磁感应强度增大时,磁流变液的屈服应力也将增大,直至两者同时达到最大。该阻尼器控制方法不但不会产生额外的振动,同时体积小、环境适应能力较强,且因其材料的原因,其内部提供的阻尼力连续可调、调整范围较大,具有较好的操作稳定性。
2.1 磁流变液阻尼器的结构和原理
磁流变液是一种新型智能材料,将主动控制中融入被动控制的元素。当系统通电产生磁场,磁流变液的流变学特性(如表观粘度、阻尼力)将随磁场改变发生变化,其状态有牛顿流体状态、半固体甚至固体状态。这一转换过程实现了快速、连续、可逆的力传递,但没有直接的机械接触。因为其中的液体存在,它在运行中不但不会再次产生振动,而且能够吸收部分振动。磁流变液振动控制阻尼器结构如图1所示。线圈未通电时,壳体内的磁流变液处于牛顿流体状态,其性能有线性函数关系。这时轴可以带动转子在壳体内自由转动,磁流变液的阻尼力影响几乎为零。当线圈施加电流产生磁场,因为磁场的作用使得转子与壳体工作间隙中的磁流变液产生力的效应而粘度变大,从而阻碍转子的转动。
2.2 阻尼器的动力学模型
假设磁流变液不能压缩其本构模型为宾汉模型,磁流变液在转子和壳体间的工作间隙内为可流动薄片状,则阻尼器动力学模型为:

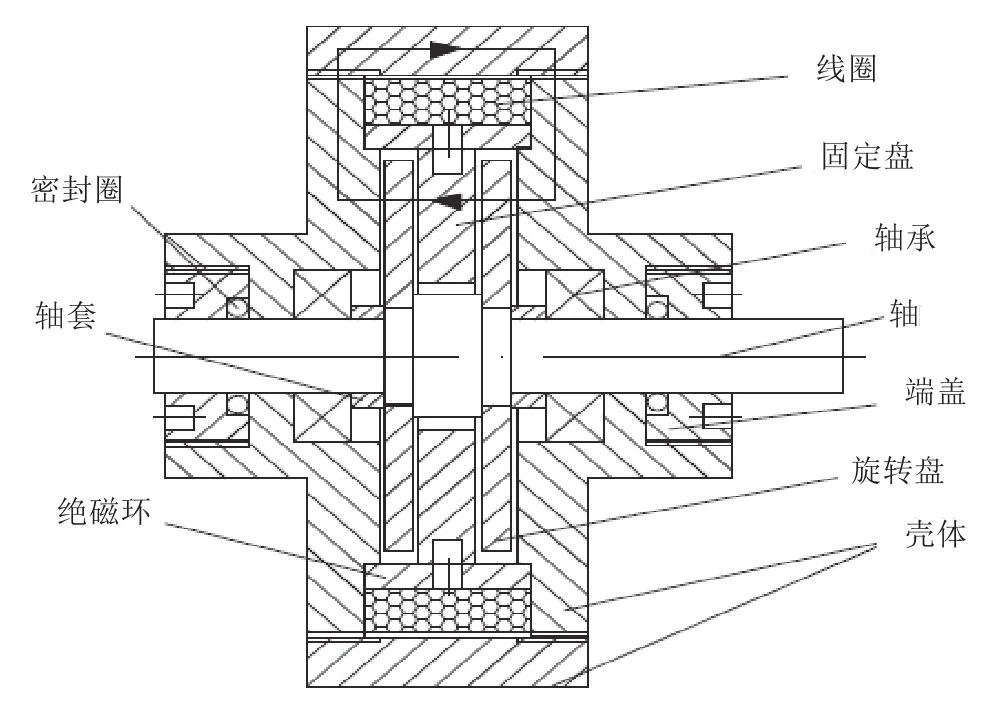
图1 磁流变液振动控制阻尼器结构
总的输出力矩由剪切磁流变液屈服应力力矩TM、磁流变液动力粘度力矩TV及装置中摩擦力力矩Tf三项内容相加组成。其中,摩擦力矩是一个常量,可看作系统误差。所以,计算输出力矩的关键是得到屈服力矩及动力粘度力矩两项内容。如图2所示,阻尼器工作间隙磁流变液剪切模型在忽摩力矩Tf后,得到磁流变液剪切力矩。
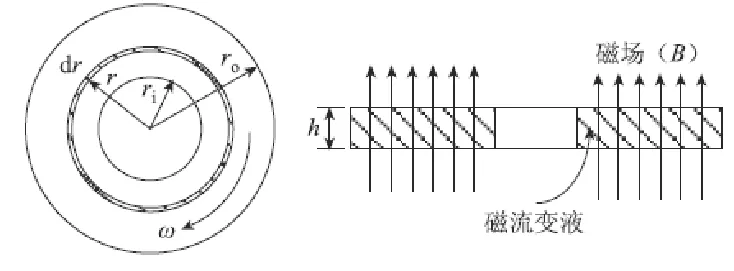
图2 阻尼器工作间隙磁流变液剪切模型
这里,ω为转子转速,h为磁流变液的厚度,τy(B)为磁流变液的屈服应力(磁感应强度B呈指数关系),μ 和m为通过实验获得的数据。
通过有限元分析软件,可得磁流变液阻尼器电磁场分布。阻尼器总输出力矩与系统不可控力矩比,即为阻尼器动态输出的范围:

3 磁流变液振动控制阻尼器控制方法性能分析

图3 防化移动机器人3自由度机械臂
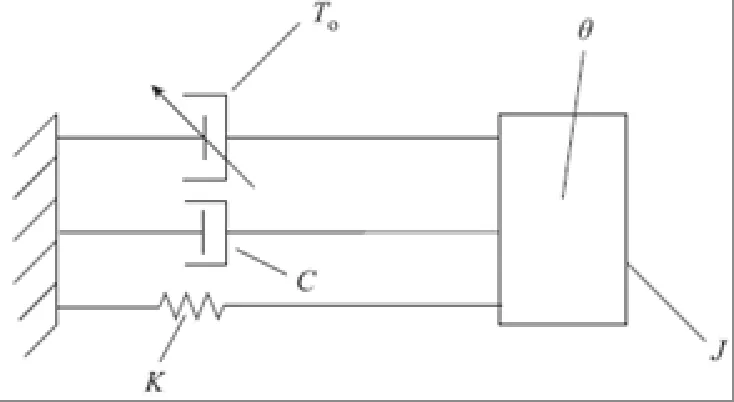
图4 肩关节的振动模型
制造磁流变液阻尼器原型,并将其安装于防化移动机器人3自由度机械臂上(见图3),模型如图4所示,可得肩关节的运动,可以用下式表示:
其中,J为部件的惯量,C为粘性阻尼系数,K为扭转刚度,To为阻尼力矩,ωn为固有频率,ξ为阻尼比。
解单自由度系统二阶微分方程如下:
式(10)为机械臂肩关节系统自由振动响应,包括粘性阻尼力矩的振动衰减与由磁流变液阻尼器对振动产生的影响两部分。随着施加电流改变,磁流变液阻尼器中的阻尼力矩随之产生改变,从而使系统振动得到有效控制。进行没有增加磁流变液系统控制器振动与有磁流变液系统控制器后,如图5所示。从两种效果的比较可以看出,使用磁流变液阻尼器对机械臂肩关节进行控制后,机械臂系统振动衰减比控制前要快得多。磁流变液阻尼器输出力矩包括剪切力矩和粘滞性力矩两种,其中剪切力矩通过电机控制,粘滞性力矩通过感应磁场控制,因此其输出力矩的动态范围很大。而两者都是用电力进行力的控制,不需要增加中间力传递机构,降低了机械系统机构的复杂性。

图5 肩关节振动衰减情况
4 总结
磁流变液振动控制阻尼器控制方法能够有效实现机械系统振动衰减,在磁流变液阻尼器作用下产生的屈服应力具有连续可调、调整范围较大、操作稳定等特征。系统间接控制了通过剪切磁场的磁流变液输出的被动力矩,也具备了连续可调、调整范围较大、操作稳定等优点。这个结果说明了在柔性机器人振动控制中添加磁流变液阻尼器结构的合理性、理论分析的正确性及半主动控制方法的有效性。可以预计,基于磁流变液阻尼器组成的控制振动方法将在机械振动控制领域,尤其是在柔性机器人振动控制领域将具有广泛的应用前景。
参考文献
[1]戴金桥,王爱民,宋爱国.基于磁流变液的柔性机器人振动控制阻尼器[J].机器人,2010,(3):358-362.
[2]陈炜,余跃庆,张绪平,等.欠驱动柔性机器人的振动可控性分析[J].自动化学报,2007,(4):391-398.
Application of MR Fluid Vibration Control Damper in Flexible Robot
CUI Guangyu,FENG Yan,ZOU Junjun
(Xi'an Institute of Railway Technology, Xi'an 710014)
Abstract:Based on a vibration based on magnetorheological fluid damper control in on the vibration of the flexible robot joint of semi active control are analyzed, and the traditional active control and dynamic ceiling shock absorber etc. compared with under the action of magnetic field in the magnetic rheological liquid phase conversion is continuous, rapid, reversible performance is strong, can according to the vibration rapid, continuous and reversible adjust damping force. After the simulation analysis and experimental analysis shows that the damper control not only produce additional vibration, at the s ame time, small volume, to adapt to the environm ent ability is strong, because of its material,it provides the damping force of continuous adjustment, adjustment range is large and has good stability, has a good application prospect of technology in fast, vibration control of flexible robot.
Key words:fluid vibration, robot, control
猜你喜欢
金桥(2019年10期)2019-08-13
科技视界(2016年21期)2016-10-17
商(2016年27期)2016-10-17
大众理财顾问(2016年9期)2016-10-11
科技视界(2016年20期)2016-09-29
大众理财顾问(2016年8期)2016-09-28
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
