
VLB I相位连接以及相时延解算的新方法研究∗
2016-06-24 11:56贺庆宝刘庆会昌胜骐郑鑫
天文学报 2016年6期
贺庆宝 刘庆会 昌胜骐 郑鑫
(1中国科学院上海天文台 上海 200030) (2中国科学院大学 北京 100049)
VLB I相位连接以及相时延解算的新方法研究∗
贺庆宝1,2刘庆会1†昌胜骐1,2郑鑫1
(1中国科学院上海天文台 上海 200030) (2中国科学院大学 北京 100049)
甚长基线干涉测量(VLBI,Very Long Baseline Interferom etry)能够提高深空探测器测定轨的精度,目前应用于深空探测中的多为差分VLBI技术(∆VLBI).差分VLBI相关相位中存在时间间隔,把不同时间段的相位无整周模糊度地连接起来能清晰地反映卫星运动轨迹,有助于提高卫星的测定轨精度和开展行星无线电科学研究.同时,VLBI相时延因其超高的精度有广泛应用,但解算条件苛刻.基于此,首先利用两个频点的差分相位与单频点相位变化趋势一致的思想,研究了一种新方法连接差分VLBI单频点的相位;然后提出一种利用窄带宽(1 MHz)中的两个频点相位解算相时延的方法,并用嫦娥三号(CE3)着陆器的数据做了实际解算和验证;最后给出了仅利用数天VLBI相时延对着陆器进行定位的方法,得到的结果为(44.1239◦N,19.5106◦W),和事后基于美国月球侦察轨道器(LRO)窄角相机(NAC)影像数据的定位结果(44.12189◦N,19.51129◦W)相比,差异为百米左右,验证了仅利用VLBI相时延也能进行着陆器定位的有效性.
VLBI,技术:干涉,方法:数据分析
1 引言
VLBI在测角方面精度很高,现被应用于深空探测中,且一般采用差分VLBI (∆VLBI)技术,即交替观测卫星和邻近的射电源,由此校正接收装置、中性大气和电离层带来的误差[1−2].∆VLBI技术在相关相位中存在时间间隔,把不同时间段的相位无整周模糊度地连接起来,其相位的变化趋势能真实地反映卫星的运动轨迹,有助于提高卫星的测定轨精度和开展行星无线电科学研究.目前在VLBI测定轨中,基本观测量是群时延,它一般由DOR(Differential One-way Ranging)信号利用带宽综合技术[3]解算得出.嫦娥三号(CE3)测定轨中VLBI群时延精度优于1 ns[4−5].但相比于相时延,群时延的精度依然较低.比如,由于随机误差的大小与带宽成反比,对于8.5 GHz的X波段信号,相时延随机误差比带宽近40 MHz的DOR群时延随机误差小约200倍.同时通道内相频特性的变化对于几十兆赫兹带宽的群时延有时可产生纳秒级的影响,而相时延受通道相频特性的影响则在皮秒量级[6−7].之前对于相时延的解算主要是把相时延靠至群时延中间,认为相时延与群时延相等[7−9],但群时延有时会因为通道相频特性的变化而产生额外的变化趋势[6−7],可能会给相时延的解算结果带来偏差.基于此,我们利用CE3的数据开展了相位连接以及相时延解算新方法的研究.
CE3于2013年12月2号发射,12月6日开始环月飞行,12月14日实现月面软着陆[10].从CE3发射到落月后数天,我国VLBI网(北京(BJ)-50 m、昆明(KM)-40 m、乌鲁木齐(UR)-25 m、上海天马(TM)-65 m)都参加了跟踪观测.在落月之前,CE3一直发送DOR信号,地面台站采用∆VLBI观测方式.在落月后,它分离成着陆器和月球车,其中着陆器一直发送带宽为5 MHz的数传信号[10−11],此时VLBI台站采用在前后各观测1 h的射电源、在中间约10 h的可视弧段内连续观测着陆器和月球车的模式.我们利用了CE3奔月时的∆VLBI数据开展了相位连接的研究,以及利用落月后着陆器的数传数据进行了相时延解算研究,最后利用着陆器的相时延结果对其进行定位解算.
2 相位连接
CE3在落月之前发送DOR信号,它包括载波(8470 MHz)以及±DOR1、±DOR2频点,其中±DOR1频点距载波±3.8 MHz,±DOR2频点距载波±19.2 MHz.地面台站采用△VLBI的观测方式,即观测数分钟卫星再观测5 m in射电源,由此DOR信号的相关相位在时域上会产生间隔.我们以2013年12月4日BJ-KM基线的数据为例具体介绍相位连接方法和步骤.
2.1 连接相位整体趋势
从时延角度上来看,差分相位对应的是群时延,单频点相位对应的是相时延,理论上两种时延除去电离层的影响后相等.这一节主要利用两个频点的差分相位与单频点相位变化趋势一致的思想来整体连接一天中的相位,可分为3个子步骤.
第1步,得到–DOR2、+DOR2的原始相关相位,并把它们每个scan的相位连接起来[8],然后将每个频点的相位分别去掉来自电离层的影响,结果如图1(a)所示.这里电离层影响的相位由基于GPS数据得到的电离层时延预测值乘以频率算得.
第2步,拟定–DOR2与+DOR2信标分别为f1和f2.先将它们的相位进行差分,然后放大f2/(f2–f1),并用七次多项式拟合,结果如图1(b)黑色点线所示.
由于f1与f2频率只相差38.4 MHz,它们的电离层时延预测值误差几乎相等,又由于通道时延在短时间内变化很小,在一定时间内可以把它看作一个定值.所以将差分相位放大f2/(f2–f1)倍后,即可得到f2频点相关相位的整体变化趋势.之后利用七次多项式进行拟合,用以降低随机噪声的影响,拟合阶数为数据处理时的经验所得.
第3步,把去掉电离层后的+DOR2相位(图1(a)红色)的每一个scan移动整数个模糊度,直至最靠近图1(b)的拟合曲线,最后+DOR2相位的整体连接结果如图1(b)中红色点线所示.
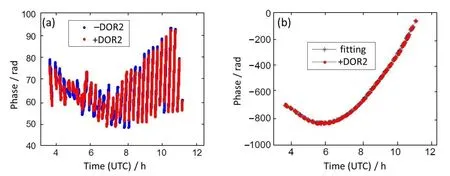
图1 相位整体连接的步骤.(a)连接每个scan的相位并去掉电离层影响后的结果;(b)拟合放大后的差分相位以及+DOR 2相位整体连接结果Fig.1 The steps of connecting phase.(a)Resu lts of connecting phase inside each scan a fter rem oving the effect from ionosphere;(b)Fitting resu lts of en larged d ifferen tia l phase and overa ll trend of+DOR 2 phase
2.2 微调模糊度
电离层时延、通道时延以及随机噪声的影响在上一节做了估算处理,这会给相位的连接带来误差.为了实现每两个scan相位无模糊度连接,需要对每个scan的相位进行微调,具体可分为两个子步骤.
第1步:以图1(b)中红色点线的前两个scan为例,先把它们都向中间方向进行直线拟合外推1.5m in,结果如图2(a)所示,然后调整后面一个scan的模糊度,并对两个scan的相位做六次多项式拟合.图2(b)给出了调整不同模糊度后拟合残差的标准差(std),其标准差最小值对应的模糊度值即为此scan应调整的模糊度个数.依照此方法对每条基线的所有scan相位进行调整.
需要说明的是:之所以对相位进行直线拟合外推是由于两个scan中间间隔时间较长(约5m in),直接对它们进行多项式拟和效果不好,而采用直线拟合外推的方法能够克服此困难.
第2步:对第1步的结果做基线相位闭合运算,基线分布图如图2(c)所示,相位闭合结果如图3中黑色点线所示.为了看清模糊度跳变的个数,我们对闭合相位值做了整除2π运算.这里我们并不要求每个闭合结果都为0,只追求闭合结果1 d之内是一个定值,这样能使得基线相位在1 d中模糊度不变,在后续的定轨中可解算出此固定模糊度.在每一个闭合结果中,出现次数最多的值即为正确值,然后比较几组基线闭合的值来调整各基线模糊度.比如基线①③⑤和基线②③⑥在某时刻的闭合值均为正确值,而基线④⑤⑥的闭合不正确,则认为此时基线④的相位需要调整.由此调整后,最后BJ-KM基线的+DOR2的相位如图2(d)所示,而最后6条基线的相位闭合值如图3中红色线所示.从基线相位闭合的结果来看,各基线相位连接正确.
3 相时延解算
相时延最大的优势在于其极高的精度,其随机误差小于1 ps[10],但其解算条件苛刻.在此我们提出一种新的思路,即利用窄带宽(1 MHz)内两个频点的相位来解算相时延.
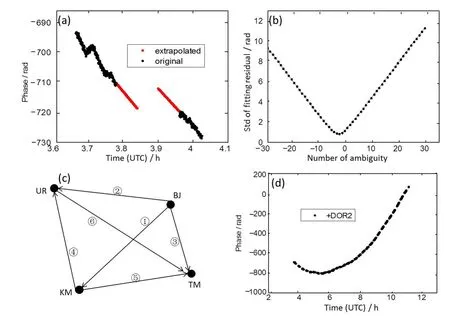
图2 微调相位模糊度的步骤.(a)对两个scan的相位拟合外推的结果;(b)调整模糊度,得到拟合残差的标准差;(c)中国VLB I网6条基线示意图;(d)BJ-KM基线相位的最后结果Fig.2 T he steps of ad justing phase am bigu ity.(a)The ex trap olated phases of 2 scans;(b)The standard deviation of fitting residuals after ad justing phase am b igu ity;(c)The sketch of Ch inese VLB I network; (d)The final connected phases of BJ-KM baseline
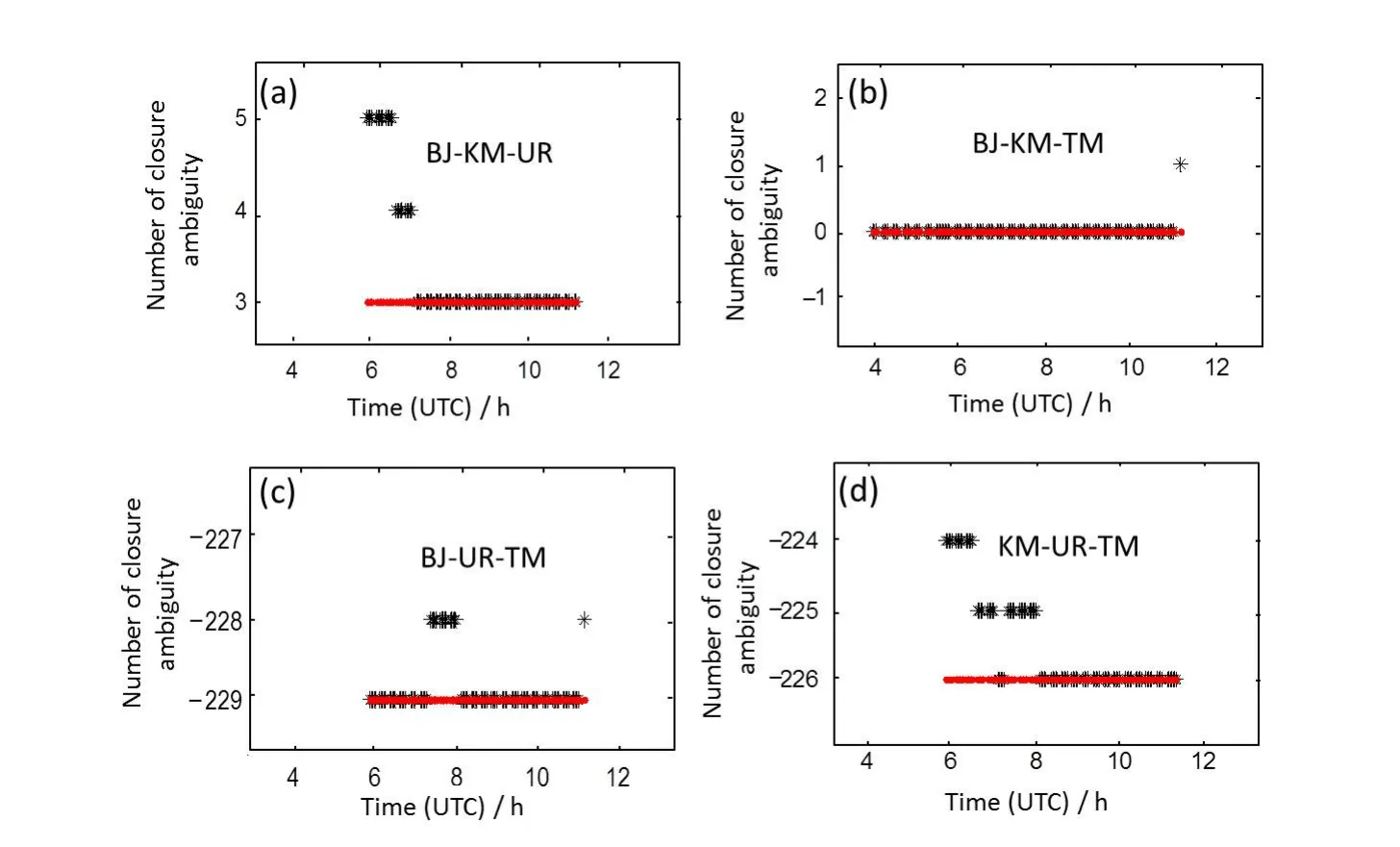
图3 基线相位闭合结果,其中黑色“∗”符号是第1步后的闭合结果,红色线是第2步后的闭合结果Fig.3 The resu lts of closu re am bigu ities,w hile the sym bols of b lack“∗”rep resent the resu lts of the first step,and the red line rep resents the resu lts of the second step
3.1 理论
设两个频点信号f1、f2相隔1 MHz,在同一个通道内被接收,进行相关处理后得到相关相位,然后利用电离层时延预测值去掉每个频点相位中的电离层影响,得到两个频点的相关相位如下:

由于f1、f2仅相隔1 MHz,模糊度的个数我们认为相等.把(1)–(2)式等号两边分别除以频率,然后做差分运算,可以求得模糊度N:


其中[]为取整运算.在求得模糊度之后,代入(1)式可得相时延为:

此时求得的相时延包括卫星残余几何时延及各类误差时延,之后需逐一去除各项误差.
3.2 误差分析
通常随机误差、电离层的时延预测值误差均不为理想值以及通道相频特性不为线性,且能对模糊度的求解产生非常大的影响.下面以X波段信标为例,取f1为8470 MHz, f2为8471MHz,依次分析在正确解算模糊度的条件下它们的阈值条件.
随机误差满足下列条件:

由(6)式解得σ<0.015◦.
电离层引起的误差需满足下列条件:

通道相频特性引起的误差需满足下列条件:

由上面分析结果显示:相位的随机误差必须非常小,通道相频特性必须符合线性关系,电离层预测精度更易满足要求.为使整体满足条件,可采取下列措施:通过长时间的积分降低随机误差的影响;通过在整个通道内对相关相位进行直线拟合,消除大部分由通道相频特性而引起的相位影响.需说明的是:最后解算的卫星相时延包含由下变频本振初相引起的时延,其值在正负一个波长时延之间.对于X波段(8.5 GHz)频率,一个波长时延约为0.12 ns.这样一个整体的误差有望在定轨定位中解算得出或者通过处理相位校准(Phase Calibration,PCAL)信号解算得出.
3.3 解算实例
在嫦娥三号落月后,着陆器一直发送带宽为5 MHz的数传信号,地面接收通道的带宽为8MHz,FFT(Fast Fourier Transformation)点数为4096点.我们以2013年12月23日着陆器数传信号为例进行相时延的解算.图4(a)是BJ-KM基线上的相关幅度,图4(b)是其相关相位.
第1步:先对整个通道所有频点的相关相位去掉电离层的影响.
第2步:对整个通道的相位进行加权直线拟合,权值为幅度值的平方.根据郑鑫等[12]的研究,此种加权拟合可使随机误差最小.更重要的是,对整个通道的相位进行直线拟合,能够去除通道相频特性以及电离层引起的大部分非线性影响.
第3步:取相关相位拟合直线上第745点和1000点的相位,它们刚好相隔1MHz,并将它们连续10 h的相位连接起来,每条基线上的相位仅存在一个模糊度.
第4步:对连续10 h相位进行积分,利用(4)式解算出模糊度,再利用(5)式解算得到的相时延如图5所示.
图5的相时延包含卫星残余几何时延、大气残余时延、通道时延、电离层预测值误差以及下变频本振初相引起的时延.其基线闭合时延结果如图6所示.图6中相时延闭合结果在0附近,从一个方面反映了解算的正确性.为得到卫星的几何时延,先将求得的相时延减去通道时延,通道时延由前面观测1 h的射电源的结果得出.然后再加上预测值(卫星几何时延预测值与大气时延估算值之和),减去大气时延预测值,即得到接近真值的卫星几何时延.

图4 2013年12月23日BJ-KM基线上的着陆器数传信号,(a)相关幅度,(b)相关相位Fig.4 T he data transm ission signal of the lander at BJ-KM baseline on 2013 Decem ber 23,(a)relative pow er,(b)correlation phase
4 基于相时延的着陆器定位结果
CE3在落月后只发送了1 h的测距(USB)和DOR信号[13],而在着陆器发送数传信号时并没有测距信号,所以在这个阶段只能利用相时延数据对着陆器进行定位.利用VLBI时延对探测器进行定位的原理可见文献[14-16].我们把CE3落月后数天的着陆器相时延解算出来,并对其进行定位分析,结果如表1所示.表1中基于LRO NAC影像结果的误差在20 m左右[17],得到CE3着陆器的坐标为44.12189◦N、19.51129◦W,高程−2633.0 m[17].但为了方便描述误差的来源,我们统一转换到月固系下的笛卡尔坐标系来比对定位结果.可以看到只利用1 d的VLBI数据定位结果较差,这是由于1 d中VLBI观测只有数小时,弧段较短,而VLBI只在横向方向约束较强,没有测距数据的约束导致径向误差较大,反映到月固系中就是X方向误差较大.但利用连续4 d VLBI数据长弧定位结果的精度在百米量级,转换成经纬坐标系则是:44.1239◦N、19.5106◦W,高程−2516 m,这验证了仅利用VLBI相时延也能进行着陆器定位的有效性.

图5 2013年12月23日各基线解算的着陆器相时延Fig.5 The calcu lated phase delay of the lander at each baseline on 2013 Decem ber 23

图6 2013年12月23日各基线相时延闭合结果Fig.6 The closu re phase delay of each baseline on 2013 Decem ber 23
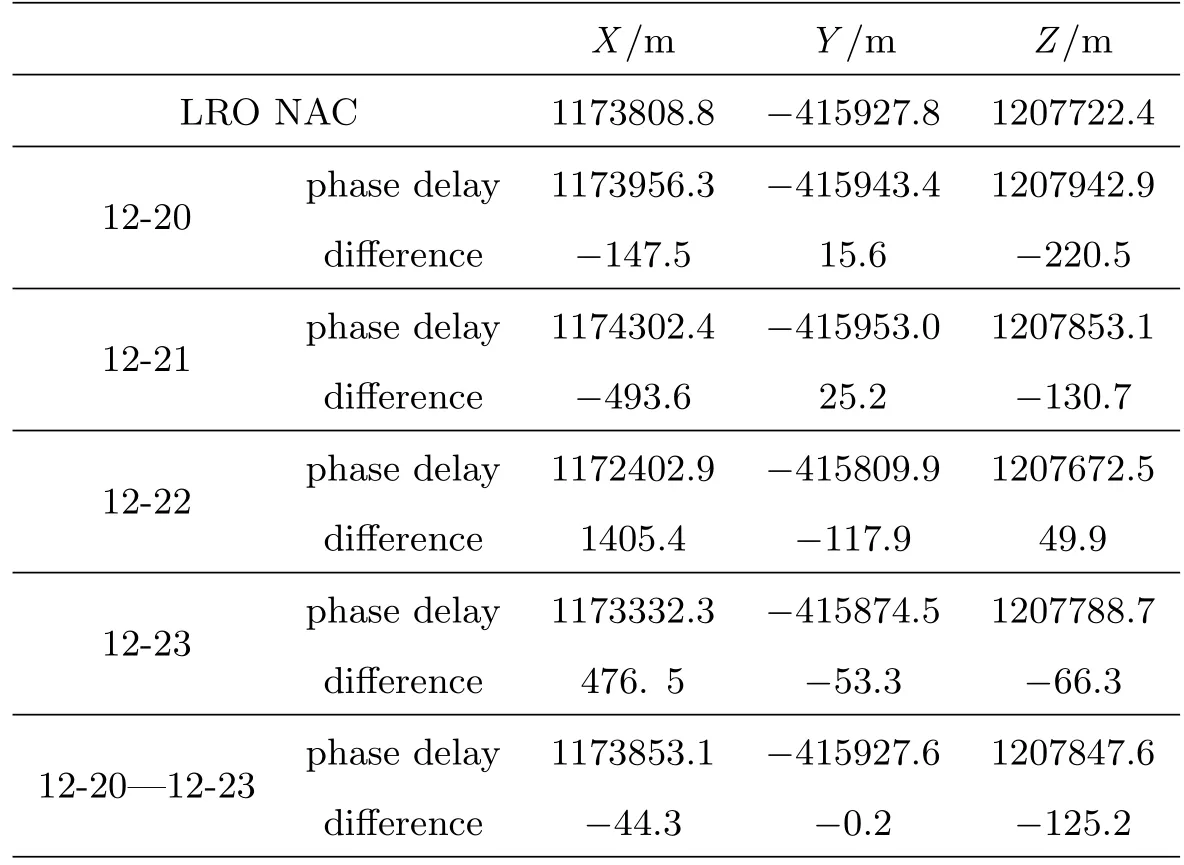
表1 利用VLBI相时延进行着陆器定位的结果Tab le 1 Resu lts of the lander position ing using phase delay of V LB I
5 结论
利用差分相位变化趋势以及相位微调能够连接差分VLBI的相关相位,同时利用窄带宽(1MHz)的两个频点相关相位能够解算出CE3着陆器的相时延,其仅利用VLBI相时延对着陆器的定位结果误差在百米左右,验证了仅利用VLBI相时延也能进行着陆器定位的有效性.
致谢感谢中国VLBI网4个台站以及上海天文台VLBI处理中心为此研究提供的数据.
[1]钱志翰,李金岭.甚长基线干涉测量技术在深空探测中的应用.北京:中国科学技术出版社,2012:50
[2]张瑞.用于卫星差分VLB I观测的参考射电源筛选.上海:中国科学院上海天文台,2015
[3]Rogers A.RaSc,1970,5:1239
[4]黄勇,昌胜骐,李培佳,等.科学通报,2014,59:2268
[5]刘庆会,贺庆宝,郑鑫,等.中国科学G辑,2015,45:039501
[6]陈明,刘庆会,唐歌实,等.中国科学院上海天文台年刊,2011,32:167
[7]郑鑫,刘庆会,吴亚军,等.宇航学报,2014,35:1030
[8]吴亚军,刘庆会,陈冠磊,等.中国科学:信息科学,2014,44:221
[9]Chen M,Liu Q H,W u Y J,et a l.ScChG,2011,54:2284
[10]Liu Q H,Zheng X,Huang Y,et a l.RaSc,2014,49:1080
[11]吴伟仁,刘庆会,黄勇,等.深空探测学报,2015,2:34
[12]郑鑫,陈冠磊,陈明,等.天文学进展,2013,31:89
[13]李培佳,黄勇,昌胜骐,等.科学通报,2014,59:3162
[14]乔书波,李金岭,孙付平.测绘学报,2007,36:262
[15]刘鹂,李金岭.武汉大学学报:信息科学版,2014,39:262
[16]Huang Y,Hu X G,Li P J,et a l.ChSBu,2012,57:4545
[17]刘斌,邸凯昌,王保丰,等.科学通报,2015,60:2750
A New Try of Connecting Phase and Resolving Phase Delay in V LB I
HE Qing-bao1,2LIU Qing-hui1CHANG Sheng-qi1,2ZHENG Xin1
(1 Shanghai A stronom ica l Observatory,Chinese Academ y of Scien ces,Shanghai 200030) (2 Un iversity of Chinese A cadem y of Scien ces,Beijing 100049)
In the deep space exp loration,the differential very long baseline interferometry(∆VLBI)technique is often used.It can help to achieve better orbit and position determ inations of spacecraft.But in the∆VLBI observation,the correlation phaseshave gaps in time domain.Connecting the correlation phaseswithout ambiguity 2πhelps to resolve the phase delay and obtain spacecraft’s orbitwith a higher accuracy, and also can make contributions to the planetary science study.Meanwhile,the phase delay isa prom isingmeasurement inmany fieldsbecause of itsextremely high accuracy, but it’s hard to be obtained.Thus we studied the correlation phase connection and phase delay resolution using the Chang’E-3 data.For the phase connection,we first im plemented the idea that differential phase was changing in the same trend with a single spectral line’s phase,and then we ad justed the phase ambiguities according to phase closure results.For the phase delay resolution,themethod is using phases of two spectral lines which are spaced in a narrow band(1 MHz)to resolve the phase ambiguities.We calculated the phase delay of Chang’E-3 lander,and by only utilizing the VLBI phase delay results,we obtained the lander’s location as 44.1239◦N,19.5106◦W. The reference of the lander’s location is44.12189◦N,19.51129◦W with an accuracy of20 m.The difference between the two results is about one hundred meters,which proves that the VLBI phase delay can be used alone to determ ine the spacecraft’s position.
VLBI,techniques:interferometric,methods:data analysis
P164;
A
10.15940/j.cnki.0001-5245.2016.06.008
2016-03-09收到原稿,2016-07-06收到修改稿
∗国家自然科学基金项目(11473059,11273049,11403082)、中国科学院天文专项(射电望远镜高精度测量与控制)、上海市导航与定位重点实验室(3912DZ227330001)、中国科学院射电天文重点实验室资助
†liuqh@shao.ac.cn
猜你喜欢
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
空军工程大学学报(2021年2期)2021-05-29
通信电源技术(2020年2期)2020-02-22
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
制导与引信(2018年2期)2018-11-09
北京航空航天大学学报(2017年4期)2017-11-23
雷达学报(2017年6期)2017-03-26
中学科技(2015年7期)2015-07-03
