直臂高空作业车臂架系统振动特性研究
2016-06-17 01:23高凌翀滕儒民
振动与冲击 2016年10期
关键词:弹性体
高凌翀, 滕儒民, 王 欣
(大连理工大学 机械工程学院,辽宁 大连 116024)
直臂高空作业车臂架系统振动特性研究
高凌翀, 滕儒民, 王欣
(大连理工大学 机械工程学院,辽宁 大连116024)
摘要:作为一种普遍应用的直臂高空作业车,其臂架为箱型阶梯截面伸缩杆件形式,臂架系统振动特性直接影响结构重量以及作业平台处的振幅,决定着操作的舒适性和安全性。基于弹性体振动理论中的欧拉-伯努利梁弯曲振动方程,建立具有末端质量的变截面阶梯梁弯曲振动方程,得到全伸条件下的臂架系统前三阶固有频率和振型曲线,利用状态空间表述臂架振动方程,在Simulink环境下模拟已知臂架仰角变化条件下的臂头位置的振动特性,并通过实例求解得到了数值计算结果。此项研究为高空作业车的振动控制提供了理论依据。
关键词:高空作业车;弹性体;弯曲振动;状态空间
高空作业车不同于其他工程机械,其主要工作形式是将人员和设备举升到指定高度,因此对于人员安全性和舒适性有较高要求,而工作平台在运动过程中的振动是影响上述要求的重要因素。因此,如何消减以及将振动控制在人体可感知的幅度之外,是提升高空作业车使用性能的重要方面。
目前国内针对高空作业车振动控制的相关研究从结构、液压和控制各个方面入手,以实现运动过程的平顺性和人员舒适性作为最终目标。例如采用多柔体动力学理论,对折臂式及混合臂式高空作业车的臂架系统进行动力学仿真[1-3];在柔体动力学方程基础上采用奇异摄动理论,通过线性二次型最优控制抑制臂架的弹性振动[4],或采用一种鲁棒性开环控制方法,即输入整形法实现抑制作业平台的摆动现象[5];采用负载敏感变量泵与压力补偿平衡阀保证运动平稳性及能量利用率[6]。针对与高空作业车具有很强相似性的云梯登高消防车,Sawodny等[7-10]采用弹性体振动分析理论,对世界知名品牌马基路斯(IVECO MAGIRUS)的多款系列化产品开展了多年的减振主动控制方面的研究。Sawodny在云梯消防车方面的研究成果对于如何实现高空作业车主动减振具有重要的借鉴意义。

图1 直臂高空作业车结构形式Fig.1 Structure oftelescopic boom aerial work platform
考虑到关于高空作业车的动力学的现有研究主要以柔体动力学为主,本文针对高空作业车中臂架结构形式最简单的直臂高空作业车。以振动力学中梁的横向弯曲振动为基础,将直臂高空作业车的臂架系统看作端部具有集中质量的阶梯梁模型,研究其振动特性,为后续的控制系统设计提供基础。图1表示了直臂高空作业车的结构形式。
1具有末端质量阶梯梁的弯曲振动
1.1臂架系统抽象模型
直臂高空作业车的臂架设计为变截面形式,以满足臂架伸缩的需要。在臂架末端设置有一个工作平台,用来搭载人员及设备,其质量及动力学效应相对于臂架而言不可忽略。针对直臂高空作业车的臂架特点,现有的均匀等截面梁的振动方程无法准确描述其振动特性,需要针对变截面阶梯梁[11],并考虑其末端的集中质量,建立新的动力学模型。
考虑到每一节臂架的长度与截面高度比值满足长细梁要求,故可以将每一级臂架看作一段欧拉-伯努利梁。图2表明,臂架截面高度逐级减小,而对于每一段梁其线密度ρA和抗弯刚度EI是恒定的,仍满足均质等截面梁的弯曲振动方程。

图2 直臂高空作业车臂架系统抽象模型Fig.2 Abstract model of beam system oftelescopic boom aerial work platform
根据弹性体振动理论,均质欧拉-伯努利梁的横向弯曲振动方程为[12]
(1)
式中w(z,t)为挠度。
假设梁模型包含N段截面形式不同的部分表示为Δi,每一段由第i段梁的轴线上左右端点zi-1和zi表示。则有,
Δi=[zi-1,zi),i=1,…,N-1
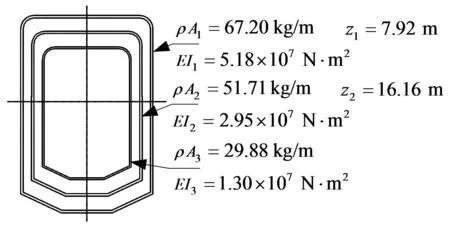
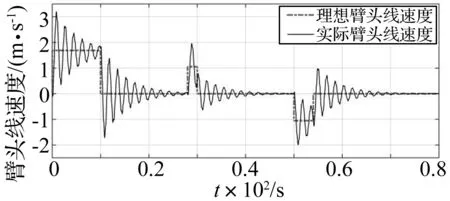
zi-1 Δ1=[0,z1),ΔN=[zN-1,L] (2) 而对于每段梁,其属性可定义为, ρA=ρAi,EI=EIi∀z∈Δi (3) 为了方便表述,引入新的变量R(z,t),表达臂架上任意位置z在时间t时对水平面绕转铰O的弧长。 Ri(z,t)=zθ(t)+wi(z,t),z∈Δi (4) 将式(4)代入式(1),可以得到针对所有z∈Δi的梁的动力学偏微分方程。 (5) 式中,RiⅣ表示对长度的四阶导。 1.2模型边界条件的确定 将臂架系统的变幅系统简化为具有转动惯量的驱动轮毂,其转轴即为臂架的根铰点,将臂架变幅油缸铰点以上的部分看作固接在驱动轮毂上。忽略臂架根铰点与变幅油缸铰点之间的距离,即看作臂架与驱动轮毂在z=0位置连接。 由第一段梁左端与轮毂为固定约束,则有 w1(0,t)=0 进一步可以得到系统在z=0位置的边界条件, R1(0,t)=0 (6) (7) 对于梁的另一端,z=L处,将工作斗及所承受的载荷合计为mC,并令其对臂架顶端的转动惯量为JC,根据动静法,结合弯矩、剪力与梁挠曲度之间的关系,可得到在臂架顶端的力学边界条件为 (8) (9) 对于每节臂架之间的连接关系,由于有上下两组滑块接触,臂架之间可以传递力与弯矩,并应满足几何连续性条件。忽略两节臂架之间的重叠部分,将相邻两段梁之间的连接看作刚性连接。故在截面突变点zi处梁的挠曲函数满足, 即可得几何连续条件, (10) (11) 而在zi处,根据剪力与弯矩连续可得到动力学连续条件, (12) (13) 由于忽略驱动油缸及其动力学效应,将臂架仰角看作系统输入, (14) 2振动方程求解 2.1通解分解 由于臂架顶端的动力学边界条件式(8)和式(9),使得系统的动力学方程不是齐次方程组。而针对该偏微分方程 的解,可以假设包括一个齐次部分(RH)和一个非齐次部分(RⅠ), R(z,t)=RⅠ(z,t)+RH(z,t) (15) 针对变截面梁模型,可以进一步得到, Ri(z,t)=Ri,Ⅰ(z,t)+Ri,H(z,t),i=1,…,N (16) 其中,齐次部分必须既满足偏微分方程和齐次边界条件,非齐次部分只满足非齐次边界条件。将式(15)代入式(5),得到对于z∈Δi有 (17) 如果等式右边为零,则等式左侧为齐次微分方程。对于齐次问题,可由式(6)~式(9)得到齐次边界条件 R1,H(0,t)=0 (18) (19) (20) (21) 由式(10)~式(13)可得到齐次连续条件 (22) (23) (24) (25) 2.2分离变量 根据系统具有与时间无关的确定振型的特性,故仍可采用分离变量法解梁的横向弯曲振动问题。针对齐次微分方程的解,采用分离变量表示为 Ri,H=T(t)Zi(z) (26) 式中,T(t)为只与时间相关的函数,Zi(z)为只与空间相关的函数。将式(26)代入式(17)可得 (27) 整理可得 (28) (29) 空间相关函数有 (30) 将式(26)代入边界条件式18)~式(21),并用式(29)消除时间相关项得到 Z1,n(0)=0 (31) (32) (33) Z‴N,n(L)+(μN/ηN)λN,nZ″N,n(L)=0 (34) 其中定义有 (35) 用同样方法处理连续性条件式(24)~式(27)可得 (36) (37) (38) (39) (40) 可用来求解所有z∈Δi的振型函数的微分方程。将式(40)代入边界条件式(18)~式(21)和连续性条件式(22)~式(25),从而确定系数Ai,n,Bi,n,Ci,n,Di,n。 边界条件与连续性条件可统一由一个方程组表述,矩阵表达式为 Mnpn=0 (41) 其中,系数向量为 (42) 矩阵Mn表示为 (43) 其中,子矩阵B1表示边界条件式(31)与(32) (44) 子矩阵BN,n表示边界条件式(33)与(34) (46) (47) 是4×4方阵,只有边界条件子矩阵,表示末端具有质量的均质悬臂梁,是分段梁模型的一个特例。 当各段梁的属性EIi和ρAi已知时,可根据特征值与特征角频率ωn之间的关系,将各段梁的特征值统一由第一段梁的特征值表示 (48) 式(43)有非零解的条件是 detMn=0 (49) 当梁的分段段数N越大,矩阵Mn的阶数越大,由于振型函数包括三角函数与双曲函数,式(49)可整理为复杂的超越方程,无法得到解析解。可通过Mathematica中FindRoot函数在指定区间求式(49)的数值解,得到对应频率的特征值λi,n,结合式(48),可以得到各段λi,n的数值解,从而得到系数向量pn,进而得到各段梁的特征函数即振型函数Zi,n。 结合由式(29)得到的时间相关函数Tn(t),可得到齐次解为 (50) 2.3非齐次解 偏微分方程式(5)的解假设为齐次解和一个非齐次微分方程解的和,如式(15)所示。非齐次解只符合连续条件和非齐次边界条件,但并非控制微分方程所必须。非齐次解假设为 Ri,Ⅰ=fi(z)u(t)=fi(z)θ(t) (51) 假设由式(17)推导出的非齐次偏微分方程在z=L处成立,由式(6)~式(9)得到非齐次边界条件为 Ri,Ⅰ(0,t)=0 (52) (53) (54) (55) 非齐次解也必须符合连续性条件式(10)~(13)。在此假设下,可以得出fi(z)=z是该问题的特解,其满足所有边界条件和连续性条件。 2.4主坐标下的振动方程表达 2.4.1振型函数的正交性 ρAN(κN/ηN)qN,a(L)qN,b(L)- (56) (57) 式(56)与(57)构成了一个希尔伯特空间H(Hilbert Space),成为主坐标空间。 对应特征值λa,λb∈,λa,λb≠0的分段连续的特征函数Za和Zb满足式(30),有 两式分别乘以Zi,b和Zi,a并相减得 (λi,a-λi,b)[Zi,a(z)Zi,b(z)]= 对等式两边沿某一分段积分∫Ωi(·)dΔi并进行两次分布积分可得 [Z‴i,a(z)Zi,b(z)-Z‴i,b(z)Zi,a(z)- 利用式(48),并对所有分段求和并利用边界条件式(31)~(34)和连续性条件式(36)~(39)可得〈Za,Zb〉=0(具体推导过程略),即振型函数在主坐标空间内具有正交性。 2.4.2主坐标下振动方程求解 与多自由度系统的振型叠加法类似,对于变截面梁的动位移可以由主坐标平面内的振型函数与权函数表示。 首先,定义主坐标下展开形式。令h∈H,则函数h(z)可以展开成广义傅立叶级数的形式 (58) (59) 针对运动方程式(17)在主坐标下逐项进行广义傅里叶级数展开。对于每一段梁有ρA(z)=ρAi,z∈Δi可得 令非齐次解RI(z,t)为RI=f(z)u(t)在主坐标下表示为 (60) 对微分项做相同处理可得 (61) 则运动方程式(19)可改写为 (62) 由于解R(z,t)是齐次与非齐次解之和,在主坐标下可以表示为 代入式(62)中可得主坐标下各阶振动方程 (63) 而如果考虑结构自身阻尼,则式(63)可进一步得到 (64) 式中,Dn为各阶的阻尼系数,可由实验或根据计算得到。 2.5振动方程状态空间表述形式 根据振动方程式(64)可得状态空间表达式 y=Cx+Du 针对不同的输出量y,可通过改变C与D的值获得。例如,获得臂头位置的位移(弧长)变化,则需令 3实际算例 根据现有某型号直臂高空作业车臂架参数(ρAn,EIn和变截面位置zn如图3所示),得到三节伸缩臂在全伸状态下(L=24.16 m)的前三阶振型曲线如图4所示。 图3 某型号直臂高空作业车臂架参数Fig.3 Parameters of a telescopic boom aerial work platform’s boom system 图4 前三阶归一化振型函数曲线Fig.4 Normalized first three eigenfunctions 利用Simulink中的状态空间模块可快速获得所需要的输出量y。仿真时间设定为80 s,输入信号u(t)为臂架仰角θ的变化曲线。图5所示为给定臂架仰角变化曲线,得到臂头位置的角位移曲线,偏差是由于忽略了三阶及以上的振型所致;图6所示为臂头位置的线速度变化曲线; 图5 臂头角位移变化曲线Fig.5 Angular displacement at tip 图6 臂头位置线速度变化曲线Fig.6 Velocity at tip 4结论 本文利用连续体振动原理,推导出具有末端质量的变截面梁的横向弯曲振动方程,利用该方程求出某型号的直臂高空作业车伸缩臂在全伸状态下的前三阶固有频率和振型函数。并选取前两阶振动特性,利用状态空间法表达臂架的振动特性,利用Simulink中的状态空间模拟模块,得到在已知臂架仰角变化曲线的条件下,臂头末端的响应特性曲线。上述研究为实现直臂高空作业车主动减振提供了理论基础。 参 考 文 献 [1] 王志彪.高空作业车臂架系统多柔体动力学仿真分析[D].秦皇岛:燕山大学,2014. [2] 蒙树立,熊静琪,吕志刚.折叠式高空作业车臂架系统的动力学建模[J].噪声与振动控制,2012,32(4):63-67. MENG Shu-li, XIONG Jing-qi, LÜ Zhi-gang. Modeling of arm system of folding-boom aerial platform vehicle[J]. Noise and Vibration Control, 2012,32(4):63-67. [3] 都亮.重型移动式高空作业车柔性臂架系统动力学分析研究[D].哈尔滨:哈尔滨工业大学,2010. [4] 蒙树立.基于柔性多体动力学的高空作业车作业臂控制方法研究[D].成都:电子科技大学,2012. [5] 经迎龙,熊静琪,王富亮.输入整形器在折叠式高空作业车防摆控制上的应用[J].噪声与振动控制,2011,31(2):38-42. JING Ying-long, XIONG Jing-qi,WANG Fu-liang. Application of input shaper to anti-swing control of cherry picker[J]. Noise and Vibration Control, 2011,31(2):38-42. [6] 彭威旺,李岚.压力补偿在高空作业车同步动作上的应用[J].机床与液压,2014,42(4):53-54. PENG Wei-wang, LI Lan.Application of pressure compensation in synchromization of aerial work carriage[J]. Machine Tool & Hydraulics,2014,42(4):53-54. [7] Sawodny O, Lambeck S,Hildebrandt A. Trajectory generation for the trajectory tracking control of a fire rescue turntable ladder[C]//Proc of the 3rd International Workshop on Robot Motion and Control.Bukowy Dworek,Poland:RoMoCo,2002:411-416. [8] Lambeck S, Sawodny O,Arnold E. Trajectory tracking control for a new generation of fire rescue turntable ladders[C]//Proc of the IEEE Conference on Robotics, Automation and Mechatronics.Bangkok, Thailand, 2006. [9] Kharitonov A, Zimmert N,Sawodny O.Active oscillation damping of the fire-rescue turntable ladder[C]//Proc of the IEEE Conference on Control Applications.Singapore, 2007:391-396. [10] Pertsch A, Sawodny O.Modelling and control of a 60 m turntable ladder as system with distributed parameters[J]. Automatisierungstechnik, Oldenbourg Wissenschaftsverlag GmbH,2012,60:522-533. [11] 崔灿,蒋晗,李映辉.变截面梁横向振动特性半解析法[J].振动与冲击,2012,31(41):85-88 CUI Can, JIANG Han, LI Ying-hui. Semi-analytical method for calculating vibration characteristics of variable cross-section beem[J]. Journal of Vibration and Shock, 2012,31(41):85-88. [12] 谢官模.振动力学[M].北京:国防工业出版社,2011. Vibration behaviors of the boom system of a telescopic boom aerial work platform GAO Ling-chong, TENG Ru-min, WANG Xin (School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China) Abstract:The boom system of the widely used telescopic boom aerial work platform is as usual designed as a telescopic boom with stepped box sections. The vibration behaviors of boom system will influence the weight of structure and the vibration amplitude at platform, which determines the operating comfortableness and safety. Based on the Euler-Bernoulli beam bending vibration equation, the bending vibration equation of a stepped beam with tip mass was established. First three inherent frequencies of the boom system at full length and corresponding normalized eigenfunctions were acquired. The vibration equation was transformed into the state space. The vibration behavior of the boom’s tip was simulated by using the Simulink with actual parameters of an aerial work platform, under the condition of varying the elevation angle of boom. The results provide a theoretical foundation for the vibration control of aerial work platforms. Key words:aerial work platform; elastic body; bending vibration; state space 基金项目:辽宁省自然科学基金(201102025);大连市科学计划项目(2012A17GX122;2013A16GX111);中央高校基本科研业务专项(DUT14ZD221);辽宁省高等创新团队支持计划(LT2014001) 收稿日期:2015-04-10修改稿收到日期:2015-06-02 通信作者王欣 女,博士,副教授,硕士生导师,1972年生 中图分类号:O326;TH113 文献标志码:A DOI:10.13465/j.cnki.jvs.2016.10.036 第一作者 高凌翀 男,硕士生,1989年生
















猜你喜欢
中国设备工程(2022年14期)2022-08-19
机械工业标准化与质量(2022年7期)2022-08-12
合成材料老化与应用(2022年3期)2022-06-27
上海塑料(2022年1期)2022-03-02
弹性体(2021年6期)2021-02-14
合成树脂及塑料(2021年6期)2021-01-09
中国塑料(2016年10期)2016-06-27
中国塑料(2015年3期)2015-11-27
中国塑料(2015年4期)2015-10-14
噪声与振动控制(2015年4期)2015-01-01