汽车纵向主动避撞DRV安全距离模型
2016-06-13 07:29:49袁朝春李道宇刘逸群张龙飞
重庆理工大学学报(自然科学) 2016年5期
关键词:车辆工程
袁朝春,李道宇,吴 飞,刘逸群,张龙飞
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
汽车纵向主动避撞DRV安全距离模型
袁朝春,李道宇,吴飞,刘逸群,张龙飞
(江苏大学 汽车与交通工程学院,江苏 镇江212013)
摘要:分析了驾驶员因素、交通路况因素和车辆制动性能因素对安全距离的影响,并在此基础上建立了DRV安全距离模型。应用Prescan仿真平台对DRV安全距离模型进行效果验证。结果表明:DRV安全距离模型能同时兼顾驾驶安全和道路使用率,基于此模型计算的报警安全距离和自动制动安全距离更加合理。
关键词:车辆工程;主动避撞;安全距离; Prescan仿真平台
随着汽车保有量的快速增长,道路交通安全问题已经成为各国政府和社会广泛关注的重要问题。美国国家高速公路安全委员会(NHTSA)的调研结果表明[1]:在道路交通致死事故中,因驾驶员过失造成的约占90%,而因车辆故障造成的仅占约3%。尽管可采用越来越多的被动安全技术(如安全气囊、安全带、行人保护和吸能车体等)减轻事故的伤害程度,但引发交通事故产生的原因未得到根本解决。通过对自车(主动避撞车)纵向运动状态的控制,使自车与前方目标保持合适的距离或自动维持自车的某种运动状态可以实现汽车的纵向主动避撞。
汽车纵向避撞系统通过降低车速和保持足够的车间距离来实现行车安全目标。而智能电动转向系统是通过转向操作把自车和交通参与者的横向距离维持在一个合理的范围内。
由于道路容量与车速成正比,而与车间距离成反比,过多地降低车速和加大车间距离会导致道路交通效率的降低。因此,应用于汽车避撞系统的安全距离模型必须兼顾行车安全和道路交通效率两方面的要求,并应有所侧重。
国内外的学者们提出了多种驾驶安全距离模型,利用安全距离的实时计算结果与实际车间距离之间的关系进行行车安全状态的判断,主要有基于制动过程运动学分析的安全距离模型[2]、基于车间时距的安全距离模型[3-4]、驾驶员预瞄安全距离模型[5]。现有安全距离模型主要是以制动系统和发动机为控制对象,应用于汽车主动避撞研究时存在准确性较低、不能适应复杂多变交通环境的需要、某些关键参数在现有技术条件下不易获得、实用性较低及对驾驶员主观感受因素考虑不足等几方面的问题。
影响车辆安全距离的主要因素有下列几个:车辆制动系统性能、道路交通信息状况、驾驶员反应能力,而现有的安全距离模型还不能同时反映这3个方面。
本研究综合考虑驾驶员因素、交通路况因素和车辆制动性能因素,建立了DRV安全距离模型,并通过Prescan仿真平台对DRV安全距离模型的有效性进行验证。
1现有安全距离模型分析
现有安全距离模型中,比较有代表性的有2个[5-7]:
1) Hideo Araki安全距离模型
(1)
其中:dw为安全车距;v1,a1为自车当前的速度和加速度;v2,a2为前方交通参与者的速度和加速度。此模型考虑了前、后车的运动关系,并且根据前、后车当前的运动状态分为两种情况:当自车速度相对比较小时,最终制动结束的条件为两车速度相等;当自车(后车)相对速度比较大时,制动结束条件为两车的速度均为0。可以看出:该模型没有考虑驾驶员和道路状况因素对安全距离的影响。
2) 马自达公司安全距离模型
(2)
其中:dw为安全车距;v1,a1代表自车(后车)当前的速度和加速度;v2,a2代表前方交通参与者的速度和加速度;td为驾驶员反应时间;tbrk为制动系统响应时间;d0为两车安全距离。
该模型基本思想:当前方交通参与者(或障碍物)以稳定的制动减速度减速时,后车传感器发现并开始向系统传达这种信息;当前后距离低于制动距离时系统给制动器发出指令,后车开始减速,最后两者相对速度为0,此时两车相距d0。模型中系统延迟时间和后车减速时间这2个参数是通过大量实验测定的,该模型中前、后两车的加速度分别取不同值,可以看出该模型没有考虑道路状况对车辆安全距离的影响。
2DRV安全距离模型
综合考虑驾驶员因素(driver factor)、交通路况因素(road factor)和车辆制动性能因素(vehicle factor)建立DRV安全距离模型。
2.1轮胎-路面附着系数辨识
根据Luis Alvarez 等[8-9]的研究成果,轮胎-路面附着系数和车速及轮胎滑移率有关,其辨识函数如式(3)所示。
(3)
式中:μ为轮胎-路面附着系数;λ为轮胎滑移率;v为车辆行驶速度;pi(i=1,2,…,5)为常数(同一车型参数固定)。表1为某车型pi的常数取值。表2为常见轮胎-路面附着系数。

表1 某车型pi常数取值
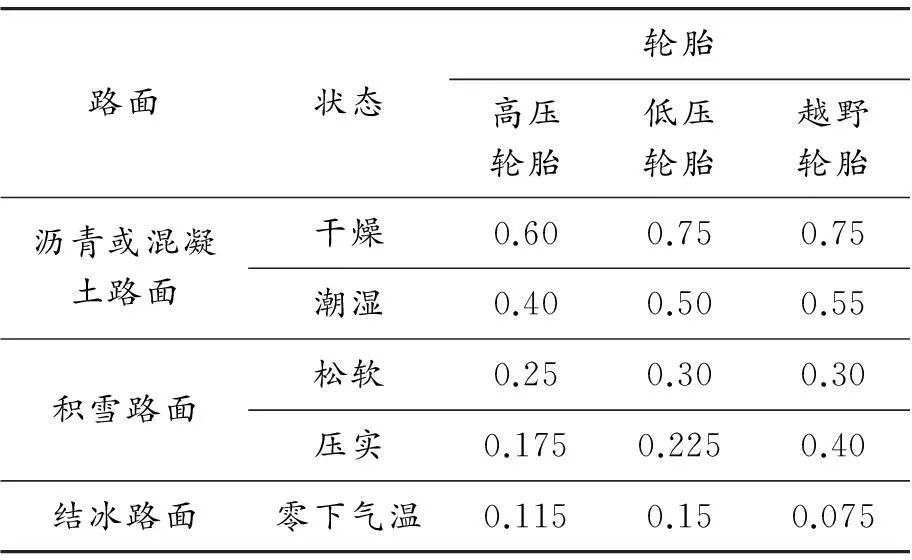
表2 常见轮胎-路面附着系数
2.2驾驶员制动反应时间建模
驾驶员驾驶能力、疲劳状态和环境因素对车辆制动安全距离起主要影响,形成对驾驶员反应时间进行评估的状态向量:X=(X1,X2,X3),其中0≤Xi≤100(i=1,2,3)。
采用综合加权法构造驾驶员反应时间影响评估函数:
(4)
其中Tnormal-d=1.25s,为普通驾驶员在正常状态下的制动反应时间。
2.3最大制动减速度建模
车辆实际制动能力受车辆性能参数、轮胎-路面附着系数和实际驾驶环境等的影响。假设车辆制动系统可以发挥道路的最大制动效能,则最大制动减速度主要受轮胎-路面附着系数和实际驾驶环境的影响。图1为车辆受力分析情况。
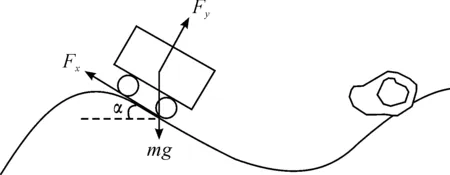
图1 车辆受力分析情况
在车辆制动系统可以发挥最大制动效能时,Fx=μmgcosα,式中:μ为轮胎-路面附着系数;m为整车载荷;α为摩擦力和水平方向夹角。
经过计算可知:在不同驾驶环境下的车辆最大制动减速度为
(5)
式中ar-max为最大制动减速度。
2.4DRV安全距离模型建模
在现有车辆制动安全距离模型基础上[10-11]建立DRV模型:
(6)
(7)
综上可以看出,目前所采用的车辆制动安全距离计算模型没有考虑驾驶员、车辆制动性能和驾驶环境的影响,模型的实用性和通用性受到明显制约。
建立DRV安全距离模型:
其中:Dw,Dbr分别为追尾碰撞报警距离和自动制动距离; Vr,ar-max分别为后(自)车速度和最大制动减速度;Vf,af分别为前车的速度和加速度;Tr-d为后(自)车驾驶员制动反应时间;Tr-b为后(自)车制动系统响应时间;Tbr为自动制动时的制动时间。
把式(3)、(4)分别代入式(8)、(9)得
(10)
(11)
3DRV安全距离模型效果验证
本次仿真基于Prescan仿真软件进行。
假设:自车驾驶员驾驶经验不足,且为疲劳驾驶状态,驾驶视线不是很好,自车行驶道路为下坡(坡度为30%),当前行驶速度为10 m/s,滑移率为20%,制动系统响应时间为0.2 s,前车因故障抛锚在道路中间。
自车驾驶员反应时间评价状态向量为X=(75,50,50),其对应的权重分别为w=(0.4,0.4,0.2)。
常用两类模型和DRV模型在该工况下的报警安全距离和自动制动安全距离如图2~4所示。
将假设条件输入Prescan并建立模拟场景,得到DRV安全距离模型的报警安全距离为31.33 m,自动制动安全距离为17.33 m,如图2所示。Hideo Araki模型的报警安全距离与自动制动安全距离如图3所示。马自达模型的报警安全距离如图4所示。在该工况下,常用的两类模型和DRV模型的报警安全距离和自动制动安全距离的理论值如表3所示。
图2 DRV安全距离模型报警安全距离与自动制动安全距离
图3 Hideo Araki模型的报警安全距离与自动制动安全距离

图4 马自达模型的报警安全距离
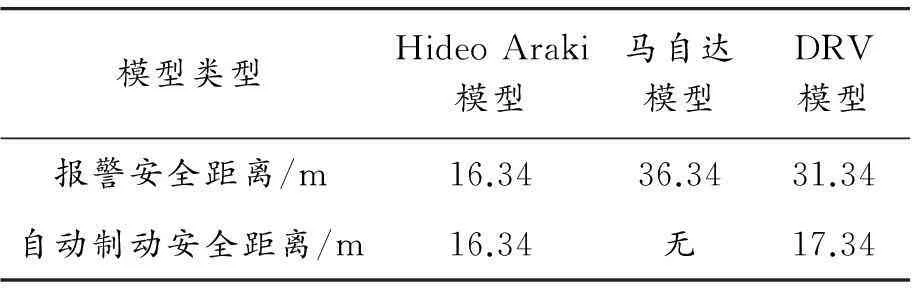
表3 3种安全距离对比结果
本文设计的DRV安全距离模型的仿真结果显示报警安全距离为31.33 m,理论值为31.34 m,自动制动安全距离为17.33 m,理论值为17.34 m,误差均在0.01 m左右。
综上所述,由于Hideo Araki模型没有考虑道路状况、驾驶员状态因素和车辆制动系统性能,因此所计算的报警安全距离严重偏小、自动制动安全距离偏小,最终会导致车辆追尾事故的发生。马自达公司所采用的模型虽然没有考虑道路坡度给安全距离模型带来的影响,但有一个5 m的安全距离,在车辆下坡制动时能保证模型的有效性,但在上坡避撞状态下会造成距离上的保守。
4结束语
在分析现有车辆安全距离模型的特点及不足的基础上,综合考虑驾驶员因素(driver factor )、交通路况因素(road factor)和车辆制动性能因素(vehicle factor),建立了DRV安全距离模型。在同等条件下,对现有模型和DRV模型进行安全距离对比分析。结果表明:所建立的DRV安全距离模型可以兼顾驾驶员驾驶特点、交通路况因素和车辆制动性能因素,得到的报警安全距离和自动制动安全距离相比现有的模型更加合理。
参考文献:
[1]NTTSA.Traffic Safety Facts 2010 Annual Report[R].USA:DOTHS,2011.
[2]李晓霞,李百川,侯德藻,等.车追尾碰撞预警系统开发研究[J].中国公路学报,2001,14(3):93-95.
[3]KYONGSU Y,MINSU W,SUNG H K,et al.An Experimental Investigation of a CW/CA System for Automobile Using Hardware in the Loop Simulation[C]// Proceedings of the American Control Conference.San Diego:[s.n.],1999.[4]SEILER P,SONG B,HEDRICK J.Development of a Collision Avoidance System[J].SAE,1998(10):9808535.[5]侯德藻,刘刚,高锋,等.新型汽车主动避撞安全距离模型[J].汽车工程,2005(2):186-190.
[6]边明远.考虑驾驶员个体特性的汽车安全行驶间距模型[J].中国机械工程学报,2010,21(12):1502-1506.
[7]董红召,陈炜烽,陈宁,等.车路集成环境下车辆防撞预警安全状态判别模型的研究[J].汽车工程,2011(9):1120-1123.
[8]GENYA A,JOHN R.Alarm Timing,Trust and Driver Expectation for Forward Collision Warning Systems[J].Applied Ergonomics,2006,37:577-586.
[9]LUIS A,JINGANG Y,BOBERTO H,et al.Emergency braking control in automated highway systems with underestimation of friction coefficient[C]//Proceedings of the American Control Conference.Chicago:[s.n.],2000:574-579.
[10]KENUE S K.Selection of range and azimuth angle parameters for a forward looking collision warning radar sensor[C]//Intelligent Transportation Systems’97.Boston:IEEE,1997:494-499.
[11]党宏社,韩崇昭,段战胜.汽车防碰撞报警与制动距离的确定[J].长安大学学报(自然科学版),2002,22(6):89-91.
[12]李霖,朱西产,马志雄.驾驶员在真实交通危险工况中的制动反应时间[J].汽车工程,2014,36(10):1225-1229.
(责任编辑刘舸)
Vehicle Longitudinal Active Collision Avoidance DRVSafety Distance Model
YUAN Chao-chun, LI Dao-yu, WU Fei, LIU Yi-qun, ZHANG Long-fei
(School of Automotive and Traffic Engineering, Jiangsu University,Zhenjiang 212013,China)
Abstract:The effects of driver factors, road factors and vehicle, factors on the accuracy of the safety distance were analyzed and the DRV safety distance model was established innovatively. The effect of DRV safety distance model was tested by Prescan simulation platform. The results show that DRV safety distance model can consider driving safety and road usage simultaneously. The alarm safety distance and automatic breaking safety distance based on the DRV safety distance model are more reasonable.
Key words:vehicle engineering; collision avoidance; safety distance; Prescan simulation platform
收稿日期:2015-03-09
基金项目:国家自然科学基金资助项目(51305167)
作者简介:袁朝春(1978—),男,江苏徐州人,博士,副教授,主要从事车辆主动安全、车辆底盘控制与系统设计、车辆整车动力学分析研究。
doi:10.3969/j.issn.1674-8425(z).2016.05.003
中图分类号:U461.91
文献标识码:A
文章编号:1674-8425(2016)05-0015-05
引用格式:袁朝春,李道宇,吴飞,等.汽车纵向主动避撞DRV安全距离模型[J].重庆理工大学学报(自然科学),2016(5):15-19.
Citation format:YUAN Chao-chun, LI Dao-yu, WU Fei, et al.Vehicle Longitudinal Active Collision Avoidance DRV Safety Distance Model[J].Journal of Chongqing University of Technology(Natural Science),2016(5):15-19.
猜你喜欢
东方教育(2016年8期)2017-01-17 20:26:10
大学教育(2016年12期)2017-01-03 20:15:15
大学教育(2016年11期)2016-11-16 20:08:53
科教导刊·电子版(2016年23期)2016-10-31 21:40:01
考试周刊(2016年76期)2016-10-09 10:00:15
大学教育(2016年7期)2016-07-27 00:50:29
大学教育(2016年7期)2016-07-27 00:42:02
考试周刊(2016年48期)2016-06-29 07:39:46
求知导刊(2016年11期)2016-06-20 15:26:35
科技视界(2015年35期)2016-01-04 10:14:17