基于机器视觉的车轮定位关键技术的研究
2016-06-07 17:12殷春平吴了泥王浩王晓光林麒
汽车工程学报 2016年3期
殷春平+吴了泥+王浩+王晓光+林麒


摘 要:基于机器视觉技术提出3D四轮定位仪参数检测过程中车身坐标系的建立方法,以及车辆定位参数求解的向量-平面数学模型,针对实际检测过程中存在运动偏差的问题提出运动补偿的解决方法,并推导了运动补偿方法的数学模型。通过真实车辆的测试试验,结果证明该检测方法的正确性和有效性,为改进或研发3D四轮定位仪提供了新的思路, 同时也为基于机器视觉的无靶标四轮定位参数检测技术奠定了理论基础。
关键词:机器视觉;车轮定位;运动补偿;数学模型
中图分类号: U467.4文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2016.03.01
Abstract:This article put forward a theory to establish the bodywork coordinate system and proposed a vector-plane mathematical model to obtain the alignment parameter values. A motion compensation solution was addressed to the deviation in motion detection process and its mathematical model was derived. At last, an experiment with a real car was carried out and the validity and effectiveness of the proposed method were proved. This method offers an innovative solution for developing 3D four-wheel alignment systems, and also provides a theoretical basis for research on non-calibration plates.
Keywords:machine vision; wheel alignment; motion compensation;mathematical model
汽车车轮定位参数直接影响汽车的安全性和操纵稳定性,准确检测车轮定位参数对于汽车行驶安全至关重要。传统测量方式基于不同原理有机械式、红外式、激光式及CCD摄像机等方法[1],总体上却存在测量过程复杂、检测慢、精度低等缺点,所以研究高效准确的车轮定位参数检测方法尤为重要[2]。近年来,随着机器视觉技术的不断发展,掀起了3D四轮定位仪的研究热潮[3],但大部分四轮定位参数测量文献主要致力于摄像机标定模型[4]或定位参数几何模型[5]的研究,这就使工程中所开发的仪器很难做到高精度重复测量[6]。主要是因为很少有研究提到如何在测量过程中建立车身坐标系,如何在任意打方向盘或调整底盘后,提高定位参数的检测精度,以及如何进行运动补偿等方法,本文将针对这些内容进行重点探讨。
1 四轮定位参数定义
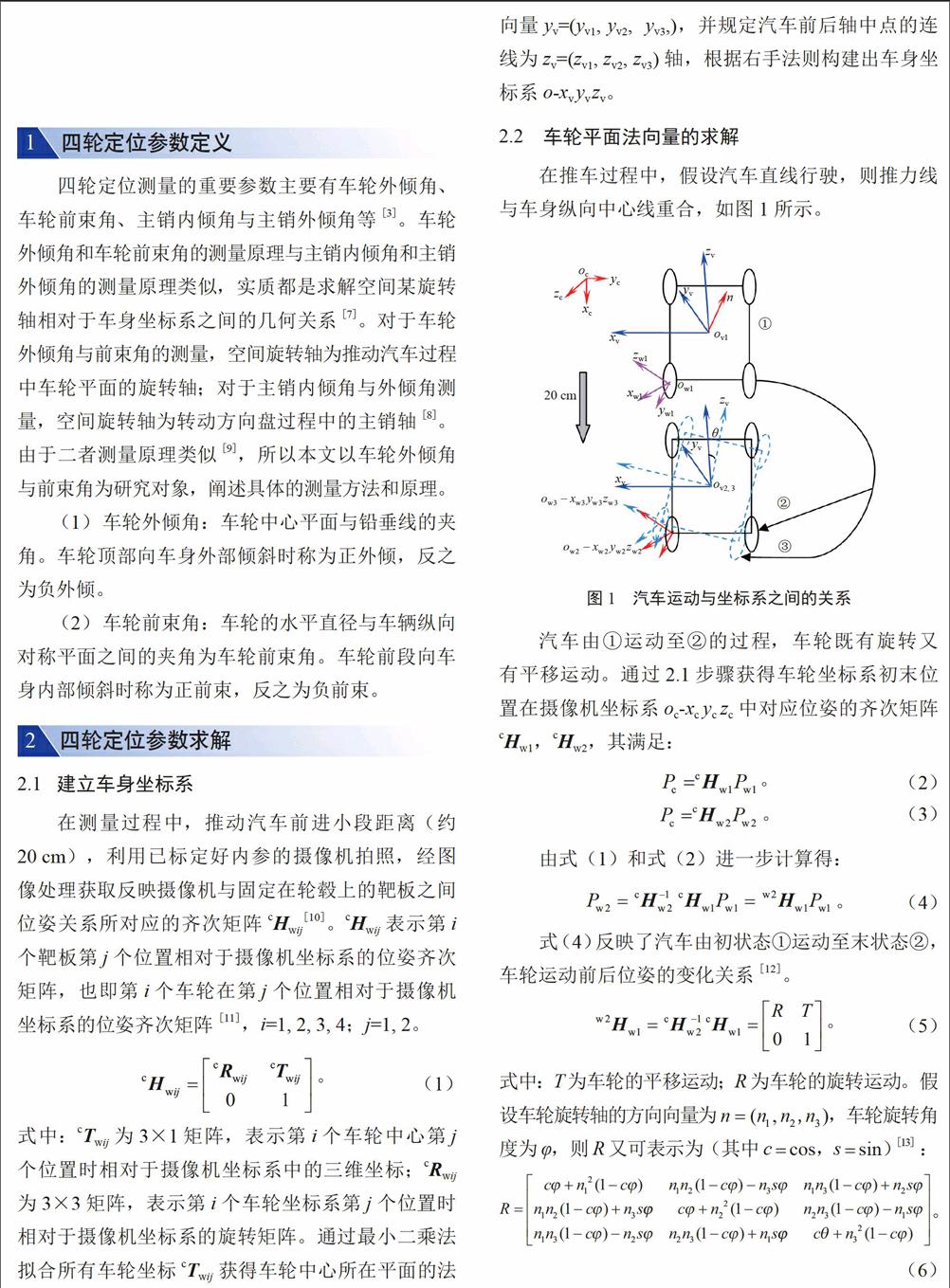
四轮定位测量的重要参数主要有车轮外倾角、车轮前束角、主销内倾角与主销外倾角等[3]。车轮外倾角和车轮前束角的测量原理与主销内倾角和主销外倾角的测量原理类似,实质都是求解空间某旋转轴相对于车身坐标系之间的几何关系[7]。对于车轮外倾角与前束角的测量,空间旋转轴为推动汽车过程中车轮平面的旋转轴;对于主销内倾角与外倾角测量,空间旋转轴为转动方向盘过程中的主销轴[8]。由于二者测量原理类似[9],所以本文以车轮外倾角与前束角为研究对象,阐述具体的测量方法和原理。
(1)车轮外倾角:车轮中心平面与铅垂线的夹角。车轮顶部向车身外部倾斜时称为正外倾,反之为负外倾。
(2)车轮前束角:车轮的水平直径与车辆纵向对称平面之间的夹角为车轮前束角。车轮前段向车身内部倾斜时称为正前束,反之为负前束。
由于式(11)主要依据平面与向量之间的几何关系得出,故称为向量-平面模型,该式形式对称,无需矩阵转化,工程中容易编程实现[16]。
3 试验结果及分析
根据上述测量方法,对一辆比亚迪轿车的车轮前束角和外倾角进行6次推车测试,重复试验中所有参数保持稳定,个别参数最大误差为2′,并将测试数据与美国杰奔3D四轮定位仪的试验结果(参考测量数据A与参考测量数据B,该仪器也是基于视觉原理,测量精确到±3′以内)进行了对比。试验结果见表1。
由表1可知:没打方向盘(状态1)测量时,左前轮外倾角误差为-8′、前束角误差为-1′;右前轮外倾角误差为11′、前束角误差为-5′;左后轮外倾角误差为2′、前束角误差为-1′;右后轮外倾角误差为4′、前束角误差为-2′,测量结果偏差较小。产生微小偏差的主要原因可能是试验中所用的靶标与杰奔3D四轮定位仪的靶标精度不一样所致。在状态B试验中(方向盘转动一小角度),前轮误差稍大,主要与方向盘调节器有关,因为试验中手动固定方向盘角度存在一定误差。尽管如此,总体上测量误差都较小,尤其是没有任何调整的后轮,其误差基本不变,也符合事实。对状态A与状态B的试验数据进行分析可知,有无运动补偿算法对结果的精度有很大影响,运动补偿算法明显可使测量过程获得更好的精准度。
4 结论
本文基于机器视觉技术研究了四轮定位参数的测量原理和数学模型,并提出了运动补偿的原理和具体方法。将真车试验的数据与美国杰奔3D四轮定位仪所测数据进行比较,结果表明本文所提出的测量算法准确度高、可行性好。本文研究成果已被委托企业采纳并产品化,得到的市场的认可,同时也为基于机器视觉的无靶标四轮定位参数检测研究奠定了理论基础。
参考文献(References):
徐观. 汽车车轮定位参数视觉检测系统及测定方法的研究 [D]. 长春:吉林大学,2009.
XU Guan. A Research of Automobile Wheel Alignment Parameters of Inspection System and Measuring Method [D]. Changchun:Jilin University,2009. (in Chinese)
张立斌,苏建,田云锋.利用计算机视觉检测汽车车轮定位参数[J].吉林大学学报(工学版),2003,33(2):32-34.
ZHANG Libin,SU Jian,TIAN Yunfeng. Using Computer Vision to Inspect Wheel Alignment Parameters [J]. Journal of Jilin University(Engineering and Technology Edition), 2003,33(2):32-34. (in Chinese)
文超. 基于计算机视觉的汽车四轮定位检测系统 [D]. 成都:电子科技大学,2008.
WEN Chao. Automobile Wheel Alignment System Based on Computer Vision [D]. Chengdu:University of Electronic Science and Technology of China,2008. (in Chinese)
薛瑾.机器视觉车轮定位系统的摄像机标定技术研究 [D].沈阳:沈阳工业大学,2011.
XUE Jin. A Research of Camera Calibration Technology on Wheel Alignment System Based on Machine Vision [D].Shengyang:Shengyang Univesity of Technology,2011. (in Chinese)
张立斌,苏建,田云锋.汽车车轮定位参数快速检测的建模研究[J]. 公路交通科技,2003,20(3):36-38.
ZHANG Libin,SU Jian,TIAN Yunfei. A Research of Rapid Detection Modeling for Automobile Wheel Align-ment [J]. Traffic Science & Technology,2003, 20(3):36-38. (in Chinese)
王德超,涂亚庆,张铁楠,等.基于计算机视觉的汽车四轮定位参数检测数学模型及方法研究 [J]. 汽车工程,2008,30(3):244-246.
WANG Dechao,TU Yaqing,ZHANG Tienan,et al. Math-ematical Model and Method Research for Automobile Wheel Parameters Detection Based on Computer Vision[J]. Auto-motive Engineering,2008,30(3):244-246. (in Chinese)
殷春平. 基于机器视觉的运动目标姿态测量之研究与实现 [D]. 厦门:厦门大学,2013.
YIN Chunping. Study and Realization on Attitude Measure-ment of Moving Objects Based on Machine Vision [D]. Xiamen:Xiamen University,2013. (in Chinese)
刘永强.基于视觉测量的汽车车轮定位技术的研究 [D].大连:大连理工大学,2008.
LIU Yongqiang. Wheel Alignment Research Based on Vision Measurement [D]. Dalian:Dalian university of Technology,2008. (in Chinese)
殷春平,林麒,吴了泥,等. 一种鲁棒的基于机器视觉的汽车3D四轮定位参数检测方法:中国,201410794607.1 [P]. 2015-04-01.
YIN Chunping,LIN Qi,WU Liaoni. A Robust Method for 3D Wheel Alignment Parameters Detection Based on Machine Vision:China,201410794607.1 [P]. 2015-04-01. (in Chinese)
STEGER C,ULRICH M,WIEDEMANN C. 机器视觉算法与应用 [M]. 杨少荣,吴迪靖,段德山,译. 北京:清华大学出版社,2008.
STEGER C,ULRICH M,WIEDEMANN C. Machine Vision Algorithm and Application [M]. YANG Shaorong,WU Dijing,DUAN Deshan,Translate. Beijing:Tsinghua University Press,2008. (in Chinese)
GONZALEZ R C, WOODS R E.数字图像处理(第三版)[M]. 阮秋琦,阮宇智,等,译. 北京:电子工业出版社,2011.
GONZALEZ R C,WOODS R E. Digital Image Processing
(3rd Edition)[M]. RUAN Qiuqi,RUAN Yuzhiet al,Translate. Beijing:Publishing House of Electronics Indu-stry,2011.(in Chinese)
徐德,谭明,李原.机器人视觉测量与控制[M].北京:国防工业出版社,2011.
XU De,TAN Ming,LI Yuan. Robot Vision Measurement and Control [M]. Beijing:National Defense Industry Press,2011. (in Chinese)
马颂德,张正友.计算机视觉 [M].北京:科学出版社,1998.
MA Songde,ZHANG Zhengyou. Computer Vision [M]. Beijing:Science Press1998. (in Chinese)
于起锋,陆宏伟,刘肖林.基于图像的精密测量与运动测量 [M].北京:科学出版社,2002.
YU Qifeng,LU Hongwei,LIU Xiaolin. Precision Measurement and Motion Detction Based on image[M]. Beijing:Science Press,2002. (in Chinese)
贾云得.机器视觉 [M].北京:科学出版社,2000.
JIA Yunde. Machine Vision [M]. Beijing:Science Press,2000. (in Chinese)
殷春平,林麒,吴了泥,等.基于机器视觉的汽3D四轮定位仪测试软件V1. 0 [Z]. 软件著作权登记号:2013SR151297.
YIN Chunping,LIN Qi,WU Liaoni. 3D Wheel Alignment Software Based on Machine Vision V1.0 [Z].Software Copyright NO:2013SR151297. (in Chinese)
猜你喜欢
新高考·高二数学(2022年3期)2022-04-29
中学生学习报(2022年16期)2022-04-16
东方教育(2017年3期)2017-05-18
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
中学数学杂志(初中版)(2016年5期)2016-11-01
中学数学杂志(初中版)(2016年5期)2016-11-01
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29