基于改进天棚控制策略的主动悬架动力学性能研究
2016-06-07 17:20陈龙高泽宇汪若尘袁朝春
汽车工程学报 2016年3期
陈龙+高泽宇+汪若尘+袁朝春


摘 要:针对采用天棚控制策略的主动悬架无法有效抑制车轮振动,从而影响车辆行驶安全性的问题,提出一种改进天棚控制策略。构建了改进天棚控制策略下的线性二自由度动力学模型,对天棚阻尼系数进行了优化设计,以采用天棚控制策略的主动悬架为比较对象,分别进行了频域和时域内的仿真对比。结果表明,相比天棚控制策略,改进天棚控制策略可有效提高高频区的乘坐舒适性和行驶安全性;在相同行驶工况下,改进天棚控制策略的车身加速度均方根值增大了3.36%,但轮胎动载荷均方根值降低了37.61%,证明了改进天棚控制策略的有效性。
关键词:主动悬架;改进天棚控制策略;乘坐舒适性;行驶安全性;仿真对比
中图分类号:U463.33文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2016.03.04
Abstract:Considering that the active suspension with skyhook control strategycannot suppress the vibration of wheel effectively and then driving safety will be affected, a new modified skyhook control strategy was proposed in this paper. A linear two degree of freedom dynamics model with modified skyhook control strategy was established firstly.Then the optimization design of the skyhook damping coefficient was conducted. Finally, simulation results were compared in frequency domain and time domain with those from the skyhook control strategy.The results show that the modified skyhook control strategy can improve the ride comfort and driving safety in high frequency region more effectively. Meanwhile, under the same driving conditions, the RMS value of vehicle body acceleration increases 3.36%, but the RMS value of tire dynamic load decreases 37.61%, which shows the effectiveness of the modified skyhook control strategy.
Keywords:active suspension; modified skyhook control strategy; ride comfort; driving safety; simulation comparison
传统被动悬架采用折中的设计方式,固定的结构参数使其无法满足不同行驶工况下的车辆动力学性能要求[1]。主动悬架突破了传统被动悬架的局限性,极大地改善了车辆的动态性能[2]。主动悬架主要包括执行机构和控制策略两大部分,执行机构主要是根据控制策略的要求输出作动力。因此,控制策略是主动悬架的设计核心[3]。目前,主动悬架的控制策略主要包括:天棚控制[4]、线性最优控制[5]、预见控制[6]、自适应控制[7]、模糊控制[8-10]、神经网络控制[11]等。由于天棚控制方式简单、易于实施且可靠性高,从而得到了广泛应用。天棚控制策略可有效提高车身隔振性能,改善车辆的乘坐舒适性,但同时会对车轮的隔振性能产生不良影响,从而影响行驶安全性。针对天棚控制策略存在的问题,本文提出一种改进的天棚控制策略,旨在提高车辆乘坐舒适性的同时,兼顾行驶安全性。
1 改进天棚控制策略
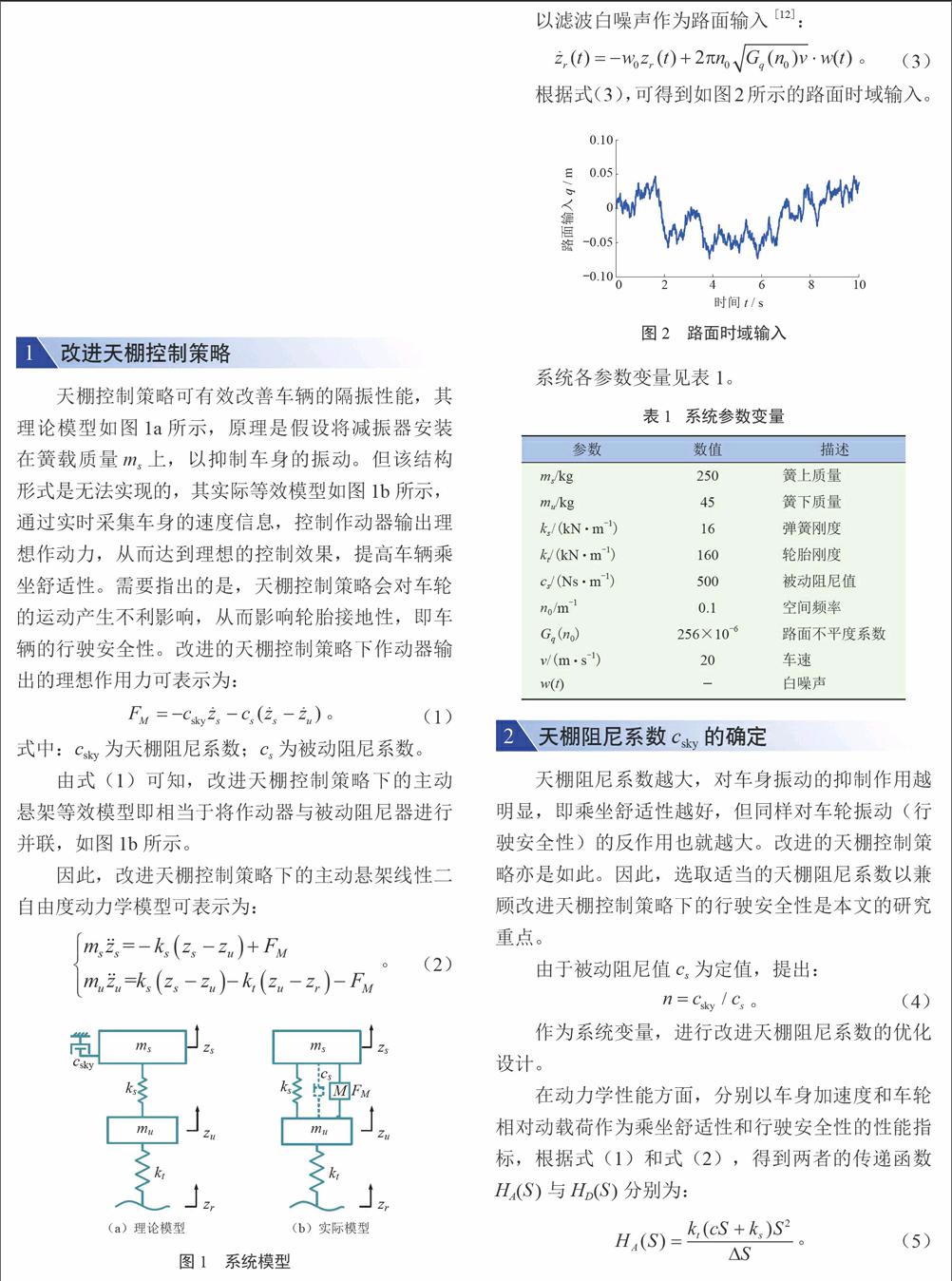
天棚控制策略可有效改善车辆的隔振性能,其理论模型如图1a所示,原理是假设将减振器安装在簧载质量ms上,以抑制车身的振动。但该结构形式是无法实现的,其实际等效模型如图1b所示,通过实时采集车身的速度信息,控制作动器输出理想作动力,从而达到理想的控制效果,提高车辆乘坐舒适性。需要指出的是,天棚控制策略会对车轮的运动产生不利影响,从而影响轮胎接地性,即车辆的行驶安全性。改进的天棚控制策略下作动器输出的理想作用力可表示为:
由式(1)可知,改进天棚控制策略下的主动悬架等效模型即相当于将作动器与被动阻尼器进行并联,如图1b所示。
因此,改进天棚控制策略下的主动悬架线性二自由度动力学模型可表示为:
系统各参数变量见表1。
2 天棚阻尼系数csky的确定
天棚阻尼系数越大,对车身振动的抑制作用越明显,即乘坐舒适性越好,但同样对车轮振动(行驶安全性)的反作用也就越大。改进的天棚控制策略亦是如此。因此,选取适当的天棚阻尼系数以兼顾改进天棚控制策略下的行驶安全性是本文的研究重点。
由于被动阻尼值cs为定值,提出:
作为系统变量,进行改进天棚阻尼系数的优化设计。
在动力学性能方面,分别以车身加速度和车轮相对动载荷作为乘坐舒适性和行驶安全性的性能指标,根据式(1)和式(2),得到两者的传递函数HA(S)与HD(S)分别为:
该传递函数反映了路面激励下,车身加速度和车轮相对动载荷的幅频特性。根据幅频特性,可知车辆的乘坐舒适性和行驶安全性。图3给出了不同n对系统动力学性能(乘坐舒适性和行驶安全性)的影响。由图3a可知,在低频区,车身加速度增益随着n的增大而减小;在高频区,情况恰好相反。这主要是因为:低频时,路面激励主要引起车身振动;高频时,路面激励主要引起车轮振动。而无论是天棚控制策略还是改进天棚控制策略,其主要用于抑制车身振动,都无法避免对车轮振动的影响。因此,高频振动时,车轮振动引起车身加速度增益增大,从而导致车身加速度增益与n成反比。
由图3b可知,在低频区,n对轮胎相对动载荷增益几乎没有影响,而在高频区,车轮相对动载荷增益随着n的增大而增大,即:n越大,行驶安全性越差,这与上文提到的天棚阻尼系数越大,对车轮振动的反作用越大是一致的。
综上所述,为兼顾改进天棚控制策略下的行驶安全性,本文选取n=10,即csky=5 000 Ns/m。需要指出的是,受限于作动器可输出的最大作动力,本文n的取值范围为5~15,当n>15时,改进天棚控制策略下的理想作动力将超过作动器可提供的最大作动力。因此,天棚阻尼系数是在作动器可输出最大作动力的约束下确定的,为相对最优值。
3 动力学性能仿真对比
确定改进天棚阻尼系数后,选取采用天棚控制策略的主动悬架作为比较对象,进行时域和频域内的动力学性能仿真对比。采用天棚控制策略的主动悬架系统参数与表1一致。
图4给出了频域内的仿真对比。在乘坐舒适性方面,由图4a可知,在高频共振区,改进天棚控制策略下的车身加速度增益要明显低于天棚控制策略;在低频共振区,两者的性能几乎一致;而在低频共振和高频共振之间,采用天棚控制策略的车身加速度增益要低于改进天棚控制策略。在行驶安全性方面,由图4b可知,在低频及低频共振和高频共振区,两者的车轮相对动载荷增益几乎相同,而在高频共振区,改进天棚控制策略下的车轮相对动载荷要远远低于天棚控制策略。上述结果说明,相比采用天棚控制策略的主动悬架,改进天棚控制策略下的主动悬架同时改善了高频共振区的乘坐舒适性和行驶安全性,而在低频共振区,两种控制策略下的主动悬架动力学性能几乎保持一致。
图5给出了时域内的仿真对比。由图5a可知,两种控制策略下的主动悬架车身加速度几乎一致,但改进天棚控制策略下的车轮动载荷要远远低于天棚控制策略。
表2给出了车身加速和车轮动载荷的均方根值,从表中可以看出,相比天棚控制策略,采用改进天棚控制策略的车身加速度均方根值提高了3.36%,但车轮动载荷均方根值降低了37.61%。由此可见,相比天棚控制策略,改进的天棚控制策略在未大幅降低乘坐舒适性的前提下,有效提高了车辆的行驶安全性。
需要强调的是,无论是天棚控制策略还是改进天棚控制策略,其对车轮振动的反作用是不可避免的。图6为改进天棚控制策略下主动悬架与传统被动悬架在车辆乘坐舒适性和行驶安全性方面的仿真对比。由图6a可知,在低频区,主动悬架的车身加速度增益要远远低于传统被动悬架;在高频区,主动悬架的车身加速度增益要略高于传统被动悬架。在行驶安全性方面,图6b给出了与图6a一致的趋势。即:在低频区,主动悬架的相对车轮动载荷增益要远远低于传统被动悬架;在高频区,主动悬架的相对车轮动载荷增益却远远高于传统被动悬架。上述结果表明了天棚控制策略的控制特点和局限性,即无法实现高频区的有效控制。但本文提出的改进天棚控制策略,有效改善了天棚控制策略存在的问题,同时,作动器的性能及其控制参数的设计,都会直接影响控制效果,而如何研制更优性能的作动器,设计更合理的控制参数,以进一步提高车辆动力学性能,将会在后续研究中进行。
4 结论
(1)提出以n=csky/cs为设计指标,根据作动器可输出的作动力范围,确定了相对最优天棚阻尼系数csky=5 000 Ns/m。
(2)频域仿真分析表明,与采用天棚控制策略的主动悬架相比,改进天棚控制策略下的主动悬架在高频共振区具有更好的动力学性能(乘坐舒适性和行驶安全性)。在低频共振区,两者的动力学性能较为接近,而在低频共振和高频共振之间,改进天棚控制策略下的主动悬架动力学性能有所恶化。
(3)时域仿真分析表明,与采用天棚控制策略的主动悬架相比,改进天棚控制策略下的主动悬架车身加速度均方根值增大了3.36%,但车轮动载荷均方根值降低了37.61%,即改进天棚控制策略可兼顾行驶安全性。
(4)天棚控制策略无法实现高频区的有效控制,改进天棚控制策略有效改善了其存在的问题。
参考文献(References):
BART L J,JEROEN L G,JOHANNES J H,et al. Design Aspects of an Active Electromagnetic Suspension System for Automotive Applications [J]. IEEE Transactions on Industry Applications,2009,45(5):1589-1597.
MARTINS I,ESTEVES J,MARQUES G D,et al. Permanent-Magnets Linear Actuators Applicability in Automobile Active Suspensions [J]. IEEE Transactions on Vehicular Technology, 2006,55(1):86-94.
支龙. 汽车主动悬架智能控制策略研究 [D]. 武汉:华中科技大学,2011.
ZHI Long. Research on Intelligent Control Strategy for Automotive Active-Suspension [D].Wuhan:Huazhong University of Science & Technology,2011. (in Chinese)
KARNOPP D C. Design Principles for Vibration Control Systems Using Semi-Active Dampers [J]. Journal of Dynamic Systems,Measurement,and Control,1990, 112(3): 448-455.
陈士安,邱 峰,何仁,等. 一种确定车辆悬架LQG控制加权系数的方法[J]. 振动与冲击,2008,27(2) :65-68.
CHEN Shian,QIU Feng,HE Ren,et al. A Method for Choosing Weights in a suspension LQG Control [J]. Journal of Vibration and Shock,2008,27(2):65-68. (in Chinese)
刘少军,李艳. 基于1/2车辆模型的主动悬架预见控制方法研究信息与控制 [J]. 信息与控制,2000,29(1):6-13.
LIU Shaojun,LI Yan. Study of Anticipated Control Method Pertinent To Active Suspension Based on a Half-Car model [J]. Information and Control,2000,29(1): 6-13. (in Chinese)
孙建民,柳贡民,王芝秋. 汽车主动悬架系统自适应控制技术研究[J]. 哈尔滨工程大学学报,2003,24(5): 530-533.
Sun Jianmin,Liu Gongmin,Wang Zhiqiu. LMS Adap-tive Control in Automobile Active Suspension System[J]. Journal of Harbin Engineering University,2003,24(5):530-533. (in Chinese)
贝绍轶,赵景波,张兰春,等. 车辆半主动悬架系统模糊神经网络控制研究 [J]. 系统仿真学报,2010,22(12):2952-2956,3007.
Bei Shaoyi,ZHAO Jingbo,ZHANG Lanchun,et al. On Fuzzy Neural Network Control of Vehicle Semi-Active Suspension System [J]. Journal of System Simulation,2010,22(12):2952-2956,3007. (in Chinese)
袁传义,贝绍轶,刘成哗. 汽车主动悬架模糊自适应控制研究 [J]. 噪声与振动控制,2010,22(5): 98-101.
YUAN Chuanyi,BEI Shaoyi,LIU Chenghua. Self-Adaptive Fuzzy Control of Vehicle Active Suspension [J]. Noise and Vibration Control,2010,22(5):98-101. (in Chinese)
陈龙,杨谋存,薛念文,等. 基于模糊模型的半主动悬架控制研究 [J]. 江苏大学学报(自然科学版),2004,25(5):385-388.
CHEN Long,YANG Moucun,XUE Nianwen,et al, Study on Semi-Active Suspension Control Based on T-S Fuzzy Model [J]. Journal of Jiangsu University (Natural Science Edition),2004,25(5):385-388.(in Chinese)
王辉,朱思洪. 半主动空气悬架神经网络的自适应控制[J]. 农业机械学报,2006,37(1): 28-31.
WANG Hui,ZHU Hongsi. Neural Net Work Adaptive Control for Semi-Active Air Suspension [J]. Transactions of The Chinese Society for Agricultural Machinery,2006,37(1):28-31.(in Chinese)
陈杰平,陈无畏,祝辉,等. 基于Matlab / Simulink的随机路面建模与不平度仿真 [J]. 农业机械学报,2010,41(3):11-15.
CHEN Jieping,CHEN Wuwei,ZHU Hui,et al. Modeling and Simulation on Stochastic Road Surface Irregularity Based on Matlab / Simulink [J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(3):11-15. (in Chinese)