一种海面定向天线自动跟踪系统
2016-06-06 07:42崔立廷
无线电通信技术 2016年3期
崔立廷
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
一种海面定向天线自动跟踪系统
崔立廷
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
摘要:从海地无线通信系统完成一个空中平台与多套船载设备之间高速数传的应用出发,针对空中设备对船载设备无线通信系统目标跟踪需求,设计了一种基于GPS定位数据的船载海面定向天线自动跟踪系统,阐述了自动跟踪系统的实现方案和跟踪算法。根据本地和目标位置信息,经过实时处理计算出目标相对本地的角度,利用伺服系统驱动定向接收天线,完成对目标的实时自动跟踪。工程验证表明,系统具有良好的跟踪效果。
关键词:定向;天线跟踪系统;目标跟踪
0引言
海地无线通信系统完成一个空中平台与多套船载设备之间的高速数传,受海面海情的影响,船体不会处于静止状态,有不同程度的摇摆和起伏,对于跟踪设备而言,船载站天线在跟踪并对准目标的同时,还要抵抗船体的摇摆和起伏,从而增加了跟踪的难度。
传统的船载跟踪天线一般采用在机械稳定平台进行安装,该平台稳定在基于大地坐标的惯性空间,使得跟踪天线对于大地坐标来说处于相对静止的状态,因此保障跟踪天线稳定的指向,但这种机械平台设计结构相对来说较为复杂,设计成本昂贵,平台的精度很难设计保障实现。
跟踪天线方位和俯仰轴上为了稳定天线时采用补偿设计船体摇姿态角,因此设计笨重的使用平台,从而保障天线设计的精确指向。考虑到计算精度和实际需求,提出了一种基于坐标变换的算法实现天线跟踪。
1跟踪控制相关计算
1.1PID控制算法
一般车载系统由GPS接收机、磁罗盘、定向天线云台和数据采集处理组成,共分为数据采集、随动控制和机械传动3部分。比对受控车和指控车的位置坐标,计算两个坐标的的方位角,磁罗盘输出实际的方向角,二者进行比较计算得出云台当前需要转动的角度。
随动控制系统部分采用数字PID控制算法[1],PID控制器通过实时比对系统误差角度数据(受控车与指控车间方位角与云台实时的方向角偏差)。通过实际系统的调试,确定PID控制器的参数调整。PID控制调整参数方便,改变结构方式灵活,在工业控制过程中得到广泛应用和普遍认可。PID控制系统原理图如图1所示。
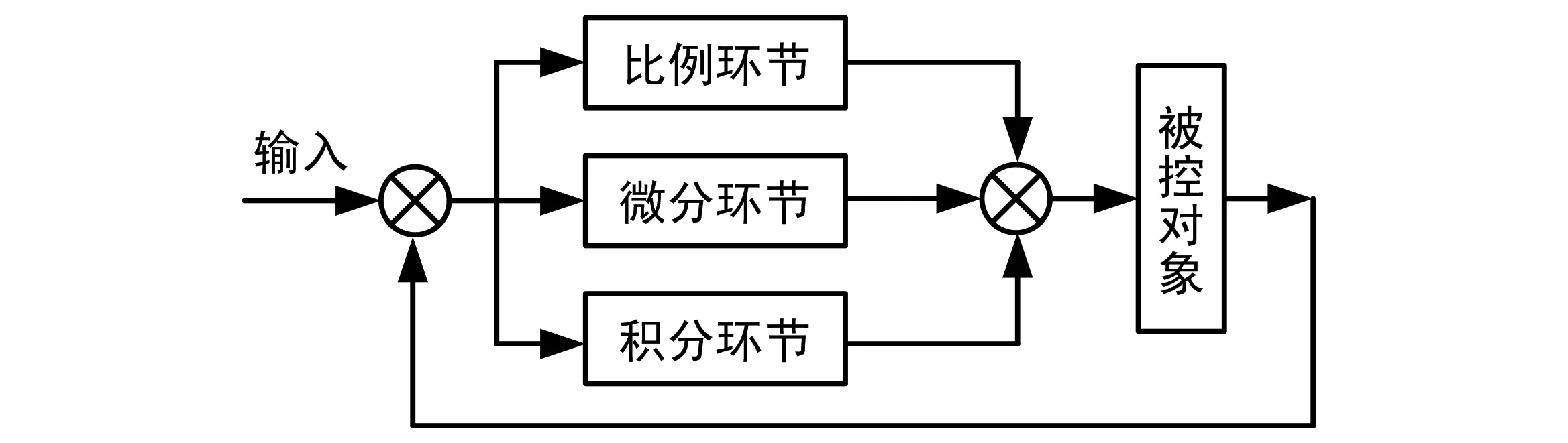
图1 PID控制系统原理图
在应用广泛的PID控制设计中,通过比对测量设计值与给定数值,计算出偏差e(t),根据偏差计算得出控制作用u(t)。采用时间连续需求类型,PID控制标准方程如下:
原来PID设计的控制器改变PID控制器的积分、微分和比例3个电位器参数实现前面提到的3种参数的设计调整。而多级设计控制网络的实现得益于现代控制理论的迅速发展并且计算机技术提高和发展。PID控制系统规律融合运行系统当前、之前及下一步的设备状态信息进行处理。PID控制器各模块的控制相互影响,仅靠某模块作用难以实现控制设计要求,确定实际的控制参数需要综合比对各个控制状态模块。PID控制器设计采用精确的数学模型基于受控对象,变参数以及非线性系统的控制系统的设计受到很大的局限。在工业应用生产过程非线性、时变非线性及不确定性,数学建模很难精确建立,采用常规设计的PID控制很难实现准确控制,运行适应性效果也不是很理想。
1.2方位角计算
跟踪随动算法是由船载指控设备和受控设备决定天线指向,实时接收GPS送出的设备的定位数据根据跟踪算法得出定向天线需要转动的方位角[2]。方位角从某指北方向开始以天线旋转轴,依顺时针方向到目标方向间经过水平夹角。当指控设备定向天线旋转到对准目标角度时,系统传输图像实现效果最好[3]。依据地球模型给出方位角指向示意如图2所示。
图2中A为指控设备位置,B为受控设备目标方向点[4]。二者坐标位置分别表示为(λ1,φ1),(λ2,φ2),θ1表示两设备间的经度差值,θ2表示两设备间的纬度差值,O表示地心,O1为受控设备当前所在纬度的平面圆心,R表示地球半径参数,r表示受控设备当前所在纬度平面圆半径。其中,θ1=|λ1-λ2|,θ2=|φ1-φ2|。
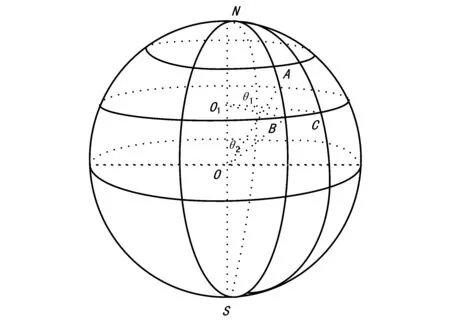
图2 gps方位角示意图
方位角的计算:


由于指控和被控目标的方位不同,方位角T取值如下:
① 指控在目标的东北方向(包括北)时,T=π+∠BAC;② 指控在目标的两北方向(包括西)时,T=π-∠BAC;③ 指控设备在受控设备目标点的西南位置(包括正南向),T=∠BAC;④指控设备在在受控设备目标点东南位置(包括正东向),T=2π-∠BAC;T∈[0°,360°)。
船载指控设备采用惯导地平系下的数引数据,该数据的坐标原点为指控船惯导基准平台台体中心,而不是天线座的三轴中心,方位角计算以地球半径为分母导致数引数据存在视差,并且目标距离越近,视差影响越大[5]。本文对此计算方法进行了改进。
2船载定向天线跟踪设计
2.1算法分析
设计的定向跟踪系统搭载装于船上,分为数据采集处理单元、GPS、定北设备和天线伺服传动组成。跟踪设计算法基本原理如下,GPS接收机实时采集导航电文完成地心直角坐标系与地理坐标系解算,计算完成后及时输出设备的位置信息,包括经度、纬度和高度等定位信息。在通信接收系统中,需要得到载体的地理坐标经度、纬度和高度和真北角等数据。采用GPS二维定位定向系统对定向天线进行方位测量和定位,通过精确测量2个天线间的GPS信号载波相位差值来获得主副天线的精确位置,再进行数学变换处理,就可获得天线与真北之间的方位值[6]。
数据处理单元采集接收本地GPS接收机传输的实时姿态信息数据,将这些数据进行解析得到本地定位位置信息,并结合空中目标点位置的定位信息数据进行算法处理得出定向天线的方位引导数据,送出目标角度数引值,控制云台电机的转动实现天线目标角度的对准跟踪。
天线伺服控制组合由天线座、伺服控制组成,伺服控制系统接收方位引导数据,控制天线转动,使定向天线指向空中目标点,实现对目标的跟踪[7]。跟踪系统设计如图3所示。
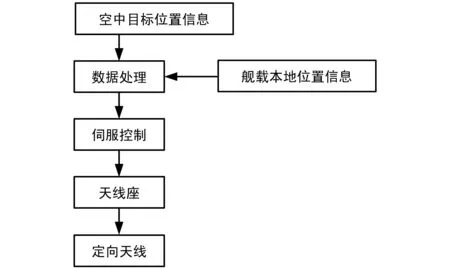
图3 跟踪系统设计
2.2算法改进
通过伺服系统控制方位角和俯仰角,从而控制船载定向接收天线的指向。
船载跟踪系统受限:由于船载载重限制、伺服设备体积小、船在海面的摇摆,造成限位点附近不能稳定[8]。再者由于船体抖动以及云台限位0°~370°,不能应用PID控制算法,选用性能/价格比最优或次优的跟踪方法是选择跟踪方式的原则,基于这个原则考虑过零点进行实时调整。
定向天线的指向受限于空中目标点和船载设备的位置,依据本地设备GPS位置信息和空中目标点定位信息解算方位角。定向天线指向空中目标点时,传输下行数据实现效果最好[9]。
实际系统设计应用中方位角需要进行调整,基于GPS输出的磁北角和设备纵轴之间的夹角,该夹角与算法计算的方位角相减,这个角度数值即是定向天线指向转动的角度[10]。而且针对船载设备相对空中目标点远近的对于方位角计算的影响,目标距离越近,视差影响越大进行方位角计算调整。
实现船载定向天线利用数字引导的方法与空中平台天线传输,根据船载设备到空中平台连线与真北的夹角γ,定向天线指向与真北的夹角β,参照天线反射面与北的夹角θ,计算判断旋转方向并根据需求调整数据发送帧频。船载定向天线与真北的夹角如图4所示。
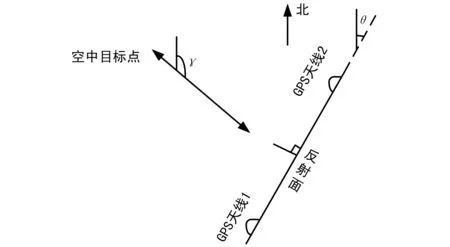
图4 定向天线数引方式示意图
3无线环境测试结果
3.1设备选型
根据船载一般战技要求,在系统中实现的目标定位误差为0.006 弧度。
在实际工程中船载定向天线采用四单元螺旋阵列天线圆极化型式实现数字导引,空中和船载定位组合使用北京某公司的惯导和双天线GPS罗盘。惯导输出空中目标的俯仰角和横滚角。双天线GPS罗盘输出船载设备GPS定位信息。双天线GPS接收设计模式通过精确位置信息计算定向、定姿。双天线GPS定向与电子罗盘定向对比来说,计算数值精度高,电磁干扰影响小等优点。双天线距离设计一般采用0.5~2 m,缺省间距0.5 m,,基线长度会影响航向精度。基线长设计采用0.5 m,航向精度可以实现0.25°;基线长设计采用1 m,航向精度能实现0.15°;基线长设计采用2 m(最大值),航向精度能达到实现0.1°。基线长多于2 m算法会错解甚至无法解算,基线长度增加可以提高定位解算的精度,也会增加定位算法解算难度、时间[11]。系统最终采用2个天线间隔长度为1 m。设备的主要性能指标如表1所示。
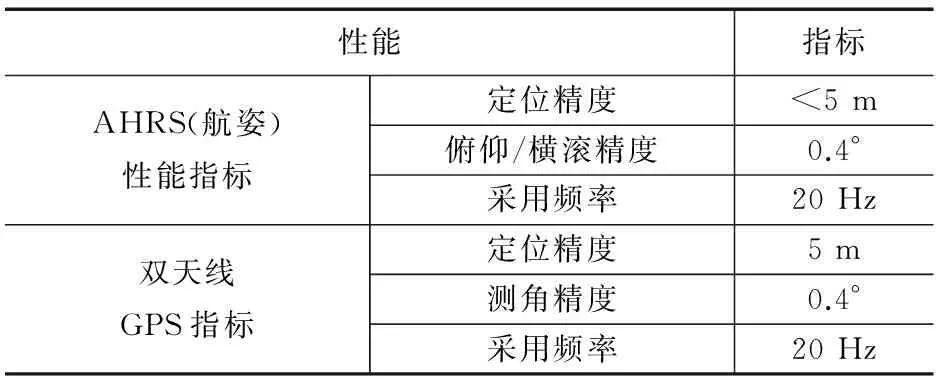
表1 性能指标
3.2测试试验
3.2.1定点测试
测试程序如下:
① 将船载设备平台与空中平台设备拉开一定距离(一般选择大于2 km),分别放置在点S1和S2,两点海拔高度差为ΔH,通视距离为d2,水平距离为d1;
② 用手持GPS测出船载设备平台的纬度、经度(B1,L1)(单位:°)和空中平台设备的纬度、经度(B2,L2)(单位:°),以及两点之间的海拔高度差ΔH;计算出距离ρ(单位:弧度);按计算出船载设备平台与空中平台设备之间的距离;
③ 计算空中平台设备相对于船载设备平台的方位值计算出方位K1(单位:弧度);
④ 将空中平台天线置于高处,与船载设备平台天线之间无遮挡无反射;设备加电,使所有设备工作正常;设置伺服设备进入数引方式,驱动天线稳定指向目标方向,记录此时天线控制组合显示的方位值;
⑤ 将天线任意偏离该方向30°左右,设置伺服设备进入数引方式,记录天线稳定显示的方位值;
⑥ 重复进行步骤,测试记录N个样本点。
3.2.2动态测试
距离50~100 km,4级海情,船体行驶速度25 km/h(折合6.94 m/s,该速率不用考虑目标速度带来的时延),上节中测试记录N个样本点的空中位置和船载位置信息以及实际输出的方位角进行计算。
空中设备大地高程hs与空中设备到目标点间的距离R有直接关系。目标与船载设备之间的距离R也会影响跟踪算法的定位精度,定位误差与距离近似成正比的关系,这也涉及到高程hs对定位算法误差的影响[12]。

对于经纬度精度的提高可采用蒙特卡洛法用Matlab进行误差仿真试验,符合近似正态分布,可以用小波分析剔除较大的误差值。动态精度误差对于距离比较敏感,经纬度精度提高对于定位误差没进行相关试验仿真。
试验结果表明天线方位稳定跟踪,算法正确可行,系统能与空中目标点保持正常通信。
4结束语
提出了一种基于双天线GPS定位海面定向天线自动跟踪系统,控制八螺旋阵列定向天线指向,实现了目标自动跟踪完成高度数据海面无线高效传输的功能。经过系统使用验证,通信稳定、实时性和可靠性好,数据无线传输效果好,具有一定的通用性。跟踪和方式精度受限于天线座、GPS定位数据以及天线标校精度等因素;跟踪算法必需要有设备安装的GPS提供定位数据,一旦载体上GPS系统出现故障,将导致整个通信系统失效,还要考虑跳值、数据融合等对数值进行修补来增强跟踪系统对使用环境的适应性。
参考文献
[1]靳林勇,曹晓辉,葛辉.智能PID控制算法在跟踪伺服控制中的仿真研究[J].电脑开发与应用,2008,21(2):24-25.
[2]钟德安.航天测量船测控通信设备标校与校飞技术[M].北京:国防工业出版社,2009.
[3]侯志强,王祖林.车载天线定向系统设计[J].电子测量技术,2006,29(4):17-18.
[4]吴振宇.定向天线转台控制系统的研究与开发[D].西安:西安电子科技大学,2007:25-29.
[5]金石,张晓林,马文智,等.一种无人驾驶直升机天线跟踪系统的研制.北京航空航天大学学报,2003,29(4):366-369.
[6]陈原.测量数据处理过程中干扰数据的剔除与取代[J].计算机测量与控制,2005,32(10):16-17.
[7]彭树生,王洋.车载快速搜索/跟踪卫星的控制系统设计[J].计算机测量与控制,2005,13(9):932-934.
[8]刘昕,张华强,赵剡.应用于天线控制的组合导航系统设计[J].通信技术.2012,45(1):18-21.
[9]石章松,等.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
[10]李宗春,李广云.地球站天线方位/俯仰角严密计算方法的研究[J].天线技术,2003,29(6):30-32.
[11]王迎节,杨社年,聂磊,等.地天线跟踪和控制测量方法分析[J].无线电通信技术,2011,37(4):31-33.
[12]任金泉,周洪波,蔡文莉.车载天线伺服技术分析[J].无线电通信技术,2012,38(2):44-47.
An Automatic Tracking System for Ship-borne Directional Antenna
CUI Li-ting
(The 54 th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Abstract:According to target tracking requirements of land-sea wireless communications system,the thesis develops an automatic tracking device based on GPS for marine directional antenna,and describes its implementation and tracking algorithm.Based on local and target location information,the target angle relative to local location is calculated through real-time processing firstly,then the servo system is used to drive directional receiving antenna to realize automatic target tracking in real time.Engineering verification shows that the system has good tracking performance.
Key words:orientation;antenna tracking system;target tracking
中图分类号:TP274.2
文献标志码:A
文章编号:1003-3114(2016)03-55-4
作者简介:崔立廷(1974—),男,工程师,主要研究方向:无人机测控技术。
收稿日期:2016-01-12 国家自然科学基金项目(61101122)
doi:10.3969/j.issn.1003-3114.2016.03.15
引用格式:崔立廷.一种海面定向天线自动跟踪系统[J].无线电通信技术,2016,42(3):55-58.
猜你喜欢
制造技术与机床(2017年3期)2017-06-23
小学生导刊(2017年13期)2017-06-15
科技创新与应用(2016年36期)2017-02-21
国际木业(2016年7期)2017-01-15
电脑知识与技术(2016年27期)2016-12-15
航空兵器(2016年5期)2016-12-10
运动(2016年7期)2016-12-01
科技视界(2016年5期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
现代电子技术(2015年18期)2015-09-16