
无人驾驶汽车简介
2016-05-30 17:56王子正程丽
时代汽车 2016年8期
王子正 程丽


摘 要:近年来随着科技的进步,无人驾驶技术也在不断提高,无人驾驶汽车能够解放操作者双手,通过计算机技术和传感技术等,使汽车变得更加便捷智能,提高交通效率。本文通过国内外无人驾驶的发展现状引入,接着详细进一步介绍无人驾驶汽车的概念及其技术的工作原理。无人驾驶是建立在信息感知、控制和执行等环节基础上的跨行业、跨学科的综合技术,它的核心技术为环境感知技术、高精度地图技术以及路径规划与决策技术。最后本文介绍了国内外无人驾驶汽车的发展历程,并展望了无人驾驶未来的发展前景。
关键词:无人驾驶;环境感知技术;信息感知;发展历程;发展前景
1 引言
2015年12月16日,中国互联网巨头百度公司宣布,公司研发的无人驾驶汽车在北京路试成功,并成立了百度无人驾驶事业部。 2016年1月6日,在美国拉斯维加斯召开的CES消费电子展上,传统的著名汽车制造公司奥迪、宝马、大众以及创新公司FaradayFuture等发布了全新自动驾驶车型。4月26日,谷歌、福特、 Uber、Lyft以及中国吉利控股旗下沃尔沃宣布,将建立一个自动驾驶汽车联盟,以促进自动驾驶技术的推广和应用。与此同时,谷歌为了更好地开发无人驾驶汽车,宣布与意大利菲亚特汽车公司展开合作。近年来,奥迪、大众、奔驰等著名汽车制造公司以及谷歌、百度等著名互联网公司,都在不断涉足智能汽车领域,抢占无人驾驶技术的前沿。无人驾驶汽车的发展,必将推动汽车行业的快速发展,也会给汽车行业带来一次重大变革。
汽车的发明给社会带来了诸多便捷和效率,汽车工业的发展也进一步促进了经济的发展与人类的创新。人们的不断需求,也使得汽车的年产量和汽车的保有量也再增加,所以研发更加便捷安全的汽车成为重中之重。科技的进步也带动着计算机控制技术不断进步,现在的汽车制造中越来越多的采用计算机自动控制技术,使无人驾驶技术不断趋于完善,从而提升其的效率、安全与节能。
2 无人驾驶汽车
无人驾驶汽车(self-driving car)是一种主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的智能汽车,又称为自动驾驶汽车、电脑驾驶汽车等[1]。无人驾驶汽车能够在道路上安全可靠地行驶,主要通过车载传感对行驶车辆的周围环境进行感知与识别,对获取的车辆位置、交通信号、道路以及障碍物等信息经行分析处理,从而控制汽车的速度和转向。
无人驾驶技术是一门建立在信息感知、信息控制以及信息执行等环节基础上的多学科、跨行业的综合性技术[2]。车辆智能化的基础包括:信息感知、处理控制、动作执行,车辆智能将经由高级驾驶辅助系统(ADAS)向整车自动驾驶发展。无人驾驶技术一般分为六个等级,依次为完全手动驾驶、辅助驾驶、部分模块自动化、特定条件下自动化、高度自动化以及全自动化的无人驾驶[3]。
3 无人驾驶汽车的工作原理
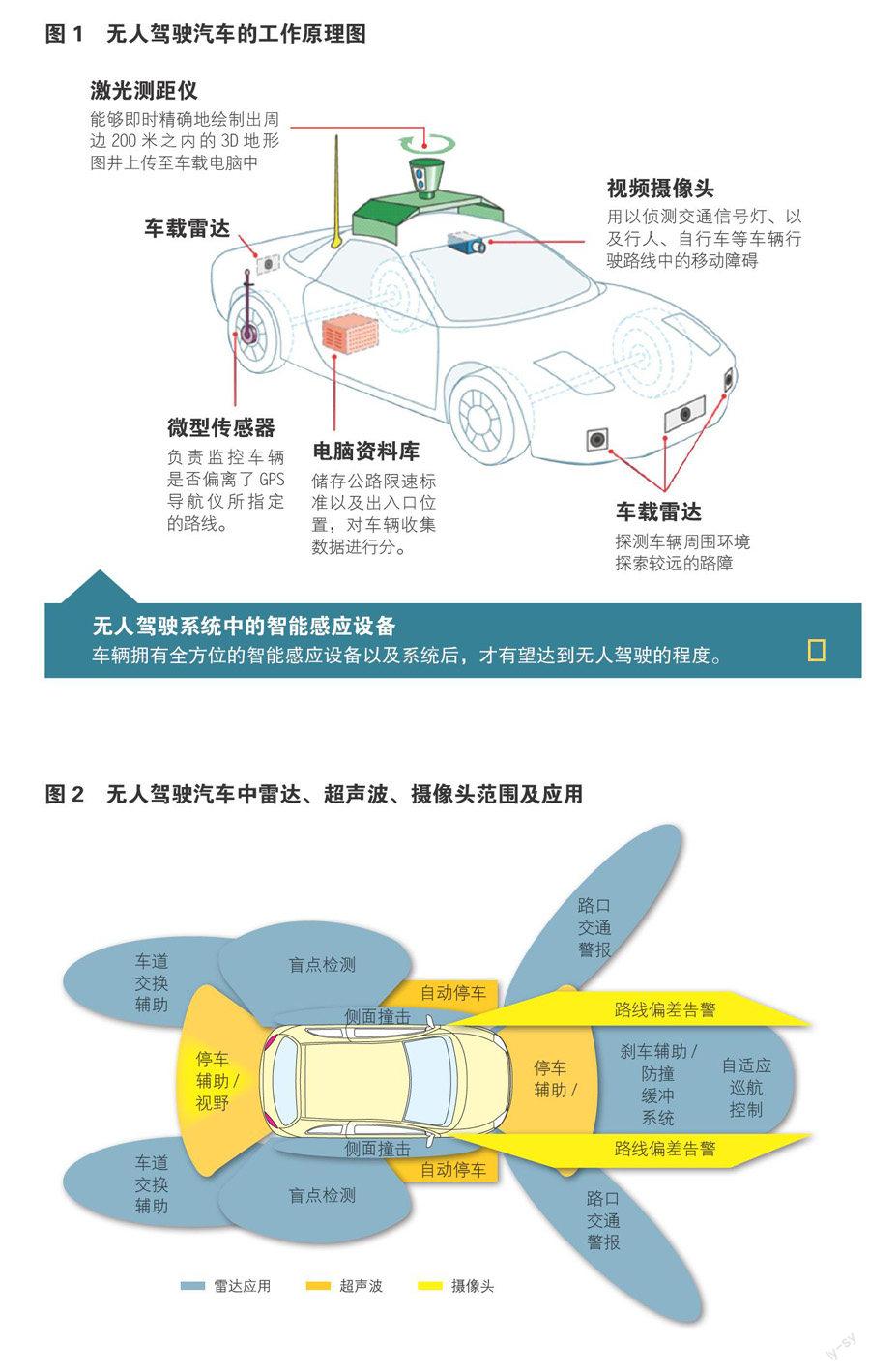
无人驾驶系统组成包括车载雷达,电脑处理系统,激光测距仪,微型传感器,视频摄像头,电脑资料库等[4]。如图1所示。
无人驾驶汽车需要感知车辆和周围物体间的距离,激光射线可以满足这一技术要求,车顶安装能够发射激光射线的激光测距仪,通过从发射到接触物体反射回来的时间,车载电脑便可计算出和物体间的距离。
车辆为了能够避开道路路障和提前做出处理,需要车载雷达探测行驶中车辆周围的固定路障。车辆为了更好地探测路障,车载雷达的布局方式采用前三后一的安装格局。安装在车后方的雷达探测在车辆变换车道时左右后方是否有车,由于车顶的激光测距仪激光反射具有盲点区域,车后雷达弥补这一不足,达到防止车辆发生侧面撞击,同时在车辆倒车时,判断车辆的倒车距离,防止发生倒车碰撞。安装在车前的三个车载雷达,能够探知车前方是否有路口以及是否有车刹车动作,雷达把探测信息传递给车载电脑,系统对探测信息进行判断和处理,并作出相应指示操作。
如图2所示,在车辆底部装有雷达、超声波、摄像头等设备,能够检测出车辆行驶方向上的角速度、加速度等一些重要数据,再利用卫星定位系统GPS传输的数据经行整合处理,能够精确计算行驶车辆的具体位置。
如图3所示,无人驾驶汽车为保障车辆在道路上正常行驶,符合交通法规,必须在车辆车头安装摄像头经行对道路地面分析判断,避免发生占道、偏离路线以及行驶错道。车辆在通过交通岗时,要利用车载雷达经行对人、车、物的分析判断,避免发生交通事故。车辆对交通信号的判断是通过车载摄像机捕获的实时图像,再结合雷达测量的路口距离,分析处理后对车辆做出停车、行驶,加速、减速等指示,提高交通效率,达到无人驾驶的目的。
4 无人驾驶汽车的发展历程
4.1 国外无人驾驶汽车的发展历程
20世纪50年代,国外就开始了对无人驾驶车辆的探索研究。美国贝瑞特电子公司在 1953年研制出全球第一台通过改装牵引式拖拉机而成的自主导航车,它的功能还仅仅局限于在布置好的导轨上传送货物。1971年,英国道路研究实验室(RRL)通过一段视频展示了其测试的一辆与通用想法类似的自动驾驶汽车。80年,美国国防部为了让汽车拥有充分的自主权,开启了自主地面车辆(AVL)新计划,该项目采用摄像头和计算机系统,来检测地形并对车进行导航。90年,奔驰汽车公司和德国慕尼黑联邦国防军大学合作研制改装了奔驰S500汽车,为其配备了多种传感器,达到了实时监测车辆周围的环境并作出相应反应,而其自动驾驶距离已经超过了1000公里。
进入 21世纪,无人驾驶汽车取得了更大的进步。2005年,美国斯坦福大学成功地对一辆大众途锐经行配备激光测距仪、处理器以及GPS导航的改装[6],也对现在的无人驾驶汽车具有重大的借鉴意义。2009年,在美国国防部的支持下,谷歌开始研发无人驾驶汽车项目,一年之后年,谷歌公司自主研制的无人驾驶汽车在城市道路上经行了行驶测试。2011年,无人驾驶汽车与普通汽车一样可以上路的相关法律在美国得到通过,谷歌公司便获得了美国无人驾驶汽车的授权,谷歌公司也成为了世界上第一个授权公司。随着政策的有利支持,无人驾驶技术在不断的完善,次年,无人驾驶汽车便进入人们的日常生活,一辆谷歌无人驾驶汽车获得了美国内华达州机动车辆管理局颁发的牌照 [7]。2014年5月,在美国科技新闻网站举办的“Code大会”上,谷歌发布了最新研发的无人驾驶汽车原型 [8]。2016年3月,谷歌研发的具有人工智能系统的无人驾驶车,被美国车辆安全监管机构认为符合联邦法律,意味着无人驾驶汽车又迈出了崭新的一步。
目前,许多知名汽车公司都在研发无人驾驶汽车,都有独立的技术平台以及产业规划,希望可以占领无人驾驶技术的前沿科技。
4.2 国内无人驾驶汽车的发展历程
我国无人驾驶汽车技术虽然研究起步较晚,但一直在循序渐进地推进之中。20世纪 80年代,我国开始了对无人驾驶汽车项目研制开,1980年,作为国家重点研究开发项目的无人驾驶汽车前身的“遥控驾驶的防核化侦察车”由国家立项。1989年,我国的首辆智能小车在国防科技大学研制成功。1992年,无人驾驶技术取得重大进步,国防科技大学、北京理工大学等著名大学研制成功了由中型面包车增加配备计算机、控制系统和传感器改装而成的我国第一辆真正意义上能够自主行驶的测试样车(ATB-1),ATB-1无人车具有人工驾驶性能也有自动驾驶性能,该测试样车的成功标志着我国无人驾驶技术研发的正式启动。
进入 21世纪,我国加快了对无人驾驶技术的重点研制开发,国家“863计划”的颁布,使无人驾驶汽车得到更多的技术和政策支持。2000年,作为我国无人驾驶汽车科学技术前沿的国防科技大学宣布其研究开发的第4代无人驾驶汽车试验成功。2003年,国防科技大学和一汽共同合作研发成功了一辆无人驾驶汽车——红旗 CA7460,该汽车能够根据车辆前方障碍的情况经行自动变换车道。两年后,我国的首辆城市无人驾驶汽车由著名高校上海交通大学研制成功。2011年,国防科技大学和中国一汽在2006年研发的无人驾驶汽车红旗HQ3取得重大进步,该车首次完成了高速全程无人驾驶试验[9],地点从湖南长沙出发,到湖北武汉结束,无人驾驶的平均速度达到 87km/h,全程总行驶距离为286公里,标志着我国又取得了新的技术突破。
2012年11月,军事交通学院研制的无人驾驶汽车完成了高速公路测试,是第一辆得到了我国官方的认证无人汽车,其高速公路测试行驶路程为京津高速台湖收费站到距离其104公里的天津东丽收费站[10]。2015年12月,百度无人驾驶汽车完成北京开放高速路的自动驾驶测试,意味着无人驾驶这一项技术从科研开始落地到产品。2016年3月,“十三五”汽车工业发展规划意见出台,规划要求在十三五期间建立汽车产业创新体系,积极发展智能网联汽车。
5 无人驾驶的核心技术
无人驾驶汽车是车辆通过车载传感系统感知汽车行驶过程中周围的道路环境状况,同时对获取的信息经行分析处理,具有自动规划行车路线并对车辆经行导航,从而到达预定目的地的智能汽车[11]。能够保障无人驾驶汽车行驶安全可靠的核心技术主要有环境感知技术、高精度地图技术以及路径规划与决策技术三个方面。
5.1 环境感知技术
作为无人驾驶汽车系统中最基础的模块,环境感知技术的功能如同人类的眼和耳一样,其主要由激光雷达、视觉摄像头、毫米波雷达等设备组成,用来获取无人驾驶汽车周围详细的环境信息,为车辆正确的行为决策提供必要的信息支持,从而达到无人驾驶。
(1)激光雷达:利用激光技术、GPS系统以及惯性测量装置从而获得相关数据,并自动生成高精确的数字高程模型,输送给车载电脑。无人驾驶汽车中的激光雷达有两个核心功能:其一是3D建模进行环境感知,通过激光扫描得到汽车周围环境的3D模型,运用相关算法比对上一帧和下一帧环境的变化探测出周围的车辆和行人。其二是同步建图加强定位,实时得到的全局地图,通过和高精度地图中特征物的比对,加强车辆导航与定位的精准度。
(2)视觉摄像头:具有人工智能中的图像识别功能,实现对驾驶员状态、障碍物以及行人的检测和交通标志、路标的识别等功能。
(3)毫米波雷达:无人驾驶里极其重要的传感器,是智能汽车高级驾驶辅助系统的标配传感器。雷达采用的毫米波的波长为 1mm-10mm,其频率为30-300GHz,具有非常强的穿透力[12]。毫米波雷达与超声波雷达以及激光、红外等光学传感相比,具有体积小、质量轻以及全天候全天时的特点,而且其空间分辨率高、穿透障碍物的能力强,极大提高了信息感知的准确性。
5.2 高精度地图技术
高精度地图和动态交通信息是无人驾驶汽车重要组件,在辅助感知、路径规划、辅助决策中起到了重要作用。高精度地图是无人驾驶汽车的重要辅助技术,能够提前使车辆获知车辆行驶前方的方向和路况[13]。动态交通信息通过互联网和GPS系统能够获取实时的交通信息状况,并传递给行驶车辆,同时车载电脑对信息经行分析处理,来判断道路拥堵的程度,并选择最佳行驶路径对车辆经行导航。
5.3 路径规划与决策技术
路径规划是决策技术的初级环节,其中涉及到的是路径搜索算法,并结合提供的实时动态交通信息,在传统静态路径规划基础上,实时动态调整及修改车载电脑最初对车辆所规划好的行驶路径,最终寻找出到达目的地的最优路径。决策技术的高级环节便是机器学习中的深度学习,在前两个核心技术对无人驾驶汽车提供的实时环境数据和交通大数据的基础上,深度学习能够不断对无人驾驶系统进行改进完善,使无人驾驶汽车在面对复杂交通状况和交通环境的时候,系统可以作出智能、合理的判断,并进行最优处理。这也是目前无人驾驶整个环节中最核心的技术,受益于谷歌、特斯拉、百度等科技巨头的潜心研究,算法已加速成熟。
6 无人驾驶汽车行业发展前景
目前国内外对无人驾驶汽车的研究方向大致有以下三个方面:( 1)高速公路环璋下的无人驾驶系统;( 2)城市环璋下的无人驾驶系统;( 3)特殊环璋下的无人驾驶系统[14]。
无人驾驶汽车目前虽已走进人们的视线,但其技术还在探索和完善当中,因为无人驾驶的相当多的科学技术还处于概念阶段以及研发测试过程,需要一定的时间再能达到真正的推广。随着科学技术的不断发展以及政策的大力支持,无人驾驶汽车的量产可能已经提上日程,其中中国无人驾驶汽车量产时间更是指日可待。2015年底,百度公司便制定的无人驾驶汽车的量产时间,其目标为3年能够商用,5年可达量产。长安汽车对无人驾驶汽车项目制定实现量产时间的目标为2018年。美国谷歌公司对其无人驾驶汽车项目制定的目标为2020年能够实现商业化, 2025年能够达到量产。
目前,仍有三大因素制约着国内外无人驾驶技术的发展:(1)技术安全;(2)法规伦理;(3)过度风险[15]。
由于无人驾驶汽车还处在研发测试阶段,导致其产品存在一些问题以及技术不成熟,但无人驾驶汽车依然成为汽车产业的热点和前沿技术,而且一些机构认为,无人驾驶产业发展已超出市场预期目标,因此有相当多的公司和企业对无人驾驶的前景表示乐观。
随着无人驾驶汽车技术的逐渐成熟,相关机构预计,2019 年无人驾驶汽车将拥有超过25%的全球市场渗透率,预计到2020年,我国无人驾驶汽车将占有汽车行业的700亿-800亿元的市场规模,且其年均复合增长可达 60%左右。可想而知,也许在不久的将来,行驶在道路上是比比皆是的安全、高效、节能的无人驾驶汽车,使城市和交通变得更加智能。最后让我们拭目以待无人驾驶汽车真正的到来。
参考文献:
[1]陈慧岩,熊光明,龚建伟,姜岩 .无人驾驶汽车概论 [M].北京理工大学出版社 2014.
[2]吕宏,刘大力,孙嘉燕 .从无人驾驶汽车奔赴世博会看未来汽车 [J].机电产品开发与创新2010(6):12-14.
[3]乔维高,徐学进 .无人驾驶汽车的发展现状及方向[J].上海汽车2007(7):40-43.
[4] 王培 .无人驾驶智能车的导航系统研究 [D].西安:西安工业大学,2012.
[5]李小乐 .基于连续视频帧的多特征融合道路车辆检测方法研究 [D].长沙:湖南大学 2013.
[6]Campbell MEgerstedt M.Autonomous drivingin urban environments:approaches,lessons and challenges[J].Philosophical Transactions of the Royal Society2010(9):4649-4672.
[7]Siva R K.Narla.The evolution ofconnected vehicle technology:from smart drivers to smart cars to… self-driving cars[J].ITE Journal,2013(7):22-26.
[8]Chen GZhang W.Design of prototype simulation system for driving performance of electromagnetic unmanned robot appliedto automotive test[J].Industrial Robot: AnInternational Journal201542(1):74-82.
[9]龚毅 .一种无人驾驶车辆路径跟踪控制方式研究 [D].南京:南京理工大学 2014.
[10]张翔 .2013年全球汽车技术发展趋势 [J].汽车工程师,2013(3).
[11]赵阳 .无人驾驶汽车关键技术 [J].中国科技博览2011(26):272-272.
[12]王慧君 .毫米波被动成像及图像处理的研究 [D].南京:南京理工大学,2007.
[13]赵盼 .城市环境下无人驾驶车辆运动控制方法的研究 [D].合肥:中国科学技术大学,2012.
[14]贾祝广,孙效玉,王斌等 .无人驾驶技术研究及展望 [J].矿业装备2014(5):44-48.
[15]张贤启,余有晟,刘俊才 .无人驾驶汽车的发展及可行性 [J].山东工业技术 2015(4):50-50.
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
中国市场(2016年36期)2016-10-19
商场现代化(2016年22期)2016-10-18
出版广角(2016年15期)2016-10-18
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
城市道桥与防洪(2013年5期)2013-03-11
