
距离选通成像的主要参数调节仿真分析
2016-05-28 02:41谭小波衣文军唐武盛李修建杨建坤
兵器装备工程学报 2016年4期
关键词:信噪比
谭小波,衣文军,唐武盛,李修建,杨建坤
(国防科学技术大学 理学院,长沙 410073)
距离选通成像的主要参数调节仿真分析
谭小波,衣文军,唐武盛,李修建,杨建坤
(国防科学技术大学 理学院,长沙410073)
摘要:距离选通激光主动成像技术能够很大程度上抑制大气后向散射和环境光的干扰,获得高分辨率、高对比度图像,该技术在目标探测、识别等领域有十分广泛的应用前景;因此,确定距离选通成像系统参数选取原则很有意义;结合距离选通成像原理,对探测器接收能量和噪声进行了估算,得到成像信噪比,建立了成像参数模型;进一步结合仿真实验,对成像的影响因素及主要参数进行了调节仿真分析,最终得到了系统参数选取原则。
关键词:激光主动成像;距离选通;信噪比;参数模型;参数调节仿真
传统的被动光学成像系统(如微光、红外成像系统)在黑夜以及烟、霾、雨等恶劣气象条件下,或者受其他低亮度、大气传输特性差等客观条件的影响,无法提供高对比度和高分辨率图像。距离选通激光主动成像技术具有成像清晰、对比度高、穿透能力强、作用距离远、不受环境光源干扰等优点[1-2],能够在复杂背景和气象条件下获取目标的图像、位置信息。该技术在目标探测、识别等领域有十分广泛的应用前景,能够在新一代制导和导航技术的发展中发挥重要作用。探究主要参数对成像的影响,对于该成像系统的搭建非常有意义。文章结合距离选通原理,建立了参数模型,对主要参数进行了调节分析,确定了参数选取原则。
1距离选通成像原理
如图1所示,距离选通激光主动成像技术利用脉冲激光作为照明光源,通过调节激光束的发散角,对远处待观测目标全部或者主要特征部位进行照射,然后选择特定的时间间隔,探测激光脉冲的回波信号,只有当脉冲回波反射到选通相机时,选通门打开,接收到信号后选通门立即关闭[3-4]。如果门控宽度和激光脉冲宽度足够短,这样将大部分非目标(大气中的悬浮颗粒等)反射的光屏蔽掉,大大减少大气后向散射光对探测的影响,提高了成像品质,实现对目标的高品质成像和精确跟踪测量。
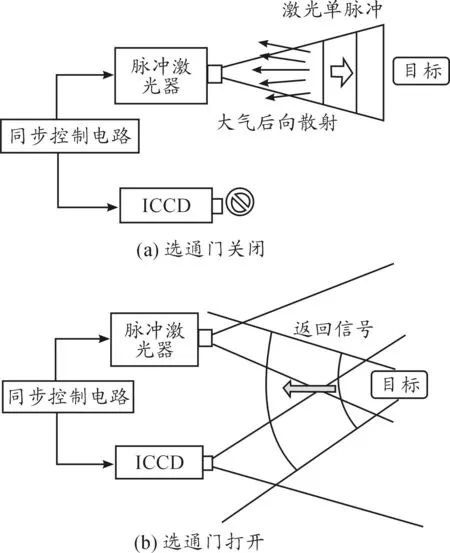
图1 距离选通成像原理图
2距离选通成像参数模型
计算在选通成像过程中,探测器接收到的目标反射能量、大气后向散射能量以及其他噪声,得到成像的信噪比,建立成像参数模型,作为对主要参数调节仿真分析的基础。
2.1CCD像元接收能量的估计
由于探测距离远大于激光发射器与探测器之间的距离,故可设激光发射器与探测器位置近似重合,发射的单脉冲能量E0,则到达距离Z处的目标平面光斑面积为S(Z)=πα2Z2/4,其中α为激光发散角。

图2 接收系统坐标系
考虑能量在路径上的衰减,距离Z处接收到的能量面密度为[6]
(1)
若区域A(X,Y,Z)为云雾,则后向散射的能量为
(2)
其中β(X,Y,Z)为(X,Y,Z)处的后向散射系数,V(X,Y,Z)为后向散射的体积,表达式为
(3)
其中,c为光速,T为选通时间。
探测器接收的区域A(X,Y,Z)产生的后向散射能量为
(4)
其中Af为探测器面积。进而得到最终像元(x,y)接收到的大气后向散射的能量为
(5)
若进一步考虑脉冲形状P(t)和探测器增益G(t),则任一探测器像元接收的光强与目标对应像元成像区域的关系[7],可以表述为
(6)
其中,Z0为选通区域的起始距离,Z为该像元对应成像目标区域的距离。
则像元(x,y)接收的大气后向散射的能量为
(7)
若区域A(X,Y,Z)为目标物体,则反射的能量为
(8)
其中r(X,Y,Z)为目标(X,Y,Z)处的反照率。
同理可得最终像元(x,y)接收的目标反射的能量为
(9)
可见,CCD像元接收的云雾后向散射能量和目标的反射能量,具有相同的形式。
2.2成像信噪比的计算
从距离选通激光主动成像的原理可以看出,影响成像的光能量主要包括激光回波、背景光噪声和系统噪声[8]。而其中背景噪声和激光回波中的后向散射噪声是成像时的主要噪声部分。另外,成像过程中的系统噪声如光子散粒噪声、读出噪声、暗电流噪声等也是不可忽略的部分[9]。
1) 激光回波。激光回波是反射回来进入探测器的激光信号,其中包括由2.1中已得到的像元(x,y)接收的目标反射的能量和大气后向散射的能量。
2) 背景噪声。背景噪声是传输过程中目标背景辐射的能量,主要为从太阳、月亮、星体等自然辐射源照射或反射到接收器上的能量[10]。CCD像元(x,y)接收到背景辐射的能量为
(10)
其中,Lλ为背景的光谱辐射;Δλ为带通滤波器带宽;Ωr为反射立体角;ρbackgr为背景平均反射系数;T为选通时间;Np为对应探测器的空间分辨率。
该成像系统的信噪比SNR公式为
(11)
其中Es为信号能量的大小,En为噪声的总能量;Vt为对应探测器的信噪比阈值,通常(10·lgVt)为5 dB。该式子可以进一步写成:
(12)
其中Enoise为系统中其他噪声,如暗电流噪声、散粒噪声和读出噪声等[11]。
综合以上分析,可以得到SNR公式的最终形式为
(13)
在实际的物理过程中,探测器ICCD接收入射的光子经光电转化产生光电子,并通过微通道板进行增益进一步放大,最终产生的电子数
(14)
其中QE为量子效率,Kgain为微通道板对光电子的增益系数。
3主要参数的调节仿真分析
仿真实验中采用的目标物体为平面舰船图(如图3所示,右侧数据条为相对灰度值),以便于分析提出的方法的可行性以及各参量的影响。
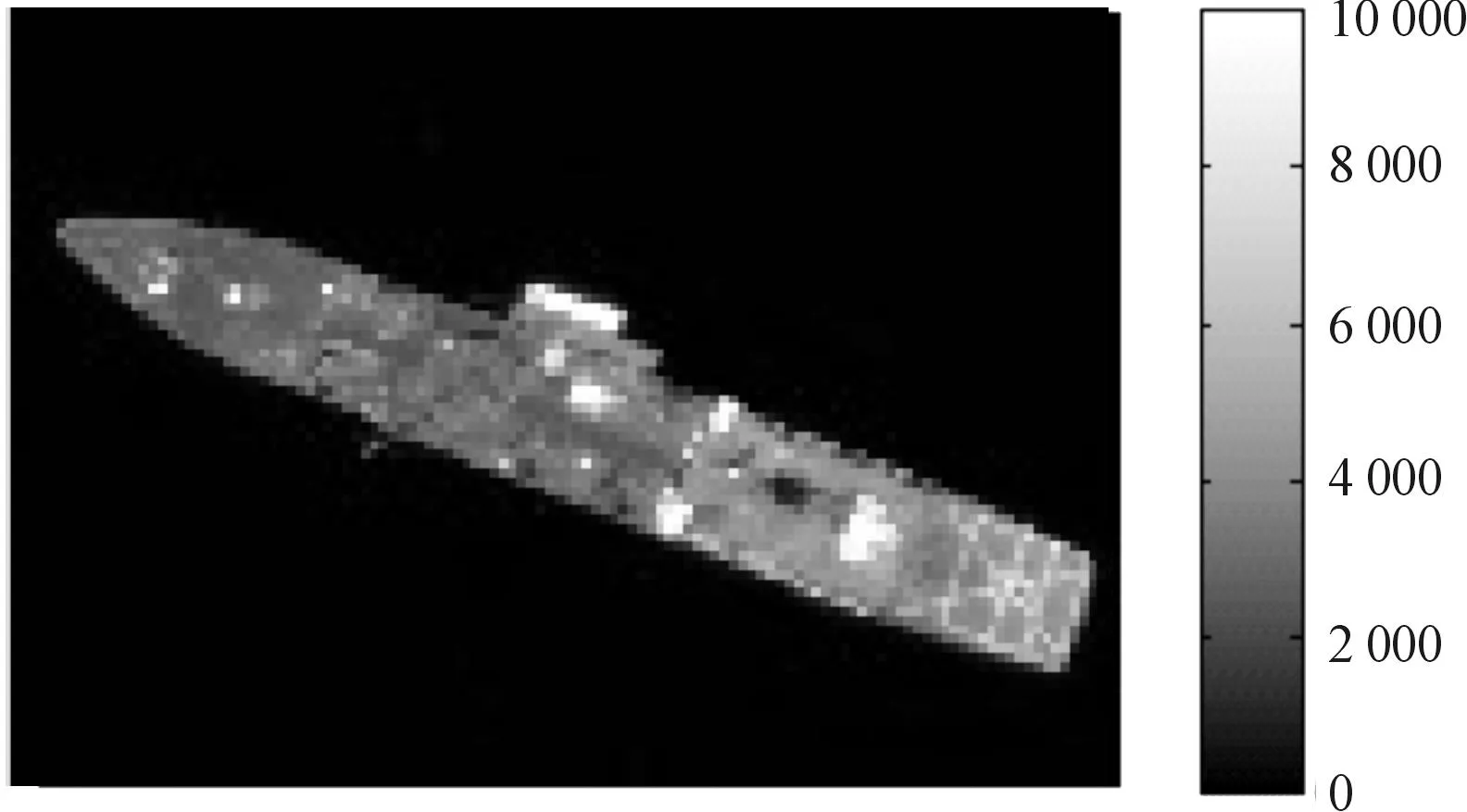
图3 目标物体平面舰船图
路径上的云雾模型如下:假设云雾厚度不均匀,云层前后表面取了简单的正弦形状,假设云层前后表面之间,总粒子数密度均匀分布,云层前后表面的模拟图像如图4。这样的模拟总体上云雾满足密度均匀但是厚度非均匀(研究光在大气中的传输,主要考虑光的透过率,故可假设为密度均匀,便于计算),雾滴复折射率的m1=1.317+8.55×10-5i,云滴的众数半径4 μm,总粒子数密度100/cm3,粒子半径服从Deirmandjian谱分布[12]。

图4 云雾模型示意图
在后面的仿真实验中,成像均是从天空穿过云雾向下俯拍的过程,且以下参数为不变参数:接收系统视场角1°×1°,CCD分辨率为100×100,像元大小13 μm ×13 μm,激光发散角为1.5°,云层厚度为50 m,云底距离接收器1 000 m。
3.1入射激光波长的影响
由激光在大气中的传输特性,在传输距离相同的条件下,波长越长散射越弱,波长越短散射越明显[13]。为了分析波长对成像的影响,进行了仿真实验。参数设置如下:激光脉冲宽度20 ns,单脉冲能量为60 mJ,目标距离接收器2 000 m,选通时间间隔40 ns。分别选用不同的波长参数进行实验,比较其信噪比的变化,得到的结果如图5所示;在选定一波长后,通过改变目标与接收器的距离,比较信噪比的变化,得到如图6所示的结果。
结合图5、图6分析,随着波长的增大,成像的信噪比也增大,这是因为波长增大使得云雾的散射减弱,激光能量的衰减减少,同时云雾后向散射产生的噪声也减少。但是,在实际应用中,波长并不是越长越好,首先由于大气对激光的吸收较为复杂,这里没有考虑大气的吸收光谱。因此,在该成像系统设计中,要结合大气的吸收光谱,选择合适的波长,在实验技术允许的情况下选择波长尽量长的光源,减少激光在大气传输过程中的损耗,同时最大限度抑制大气后向散射的影响,提高系统成像的信噪比。查阅相关资料[12],1.4~1.9 μm波段为近红外窗口,其中1.55~1.75 μm透过率较高,在实验中选取波长为1.6 μm的激光可以取得较好的效果。
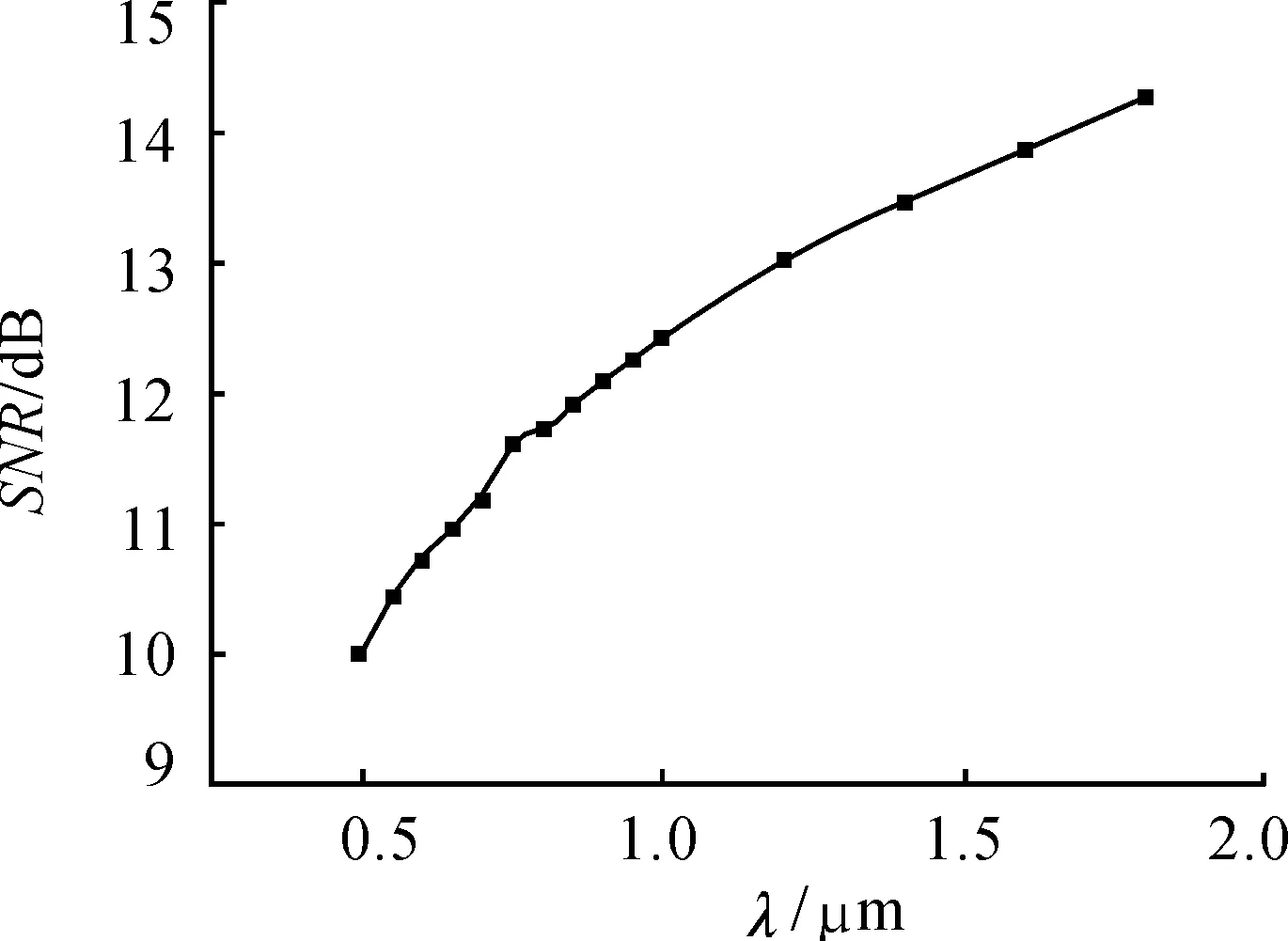
图5 信噪比与激光波长关系
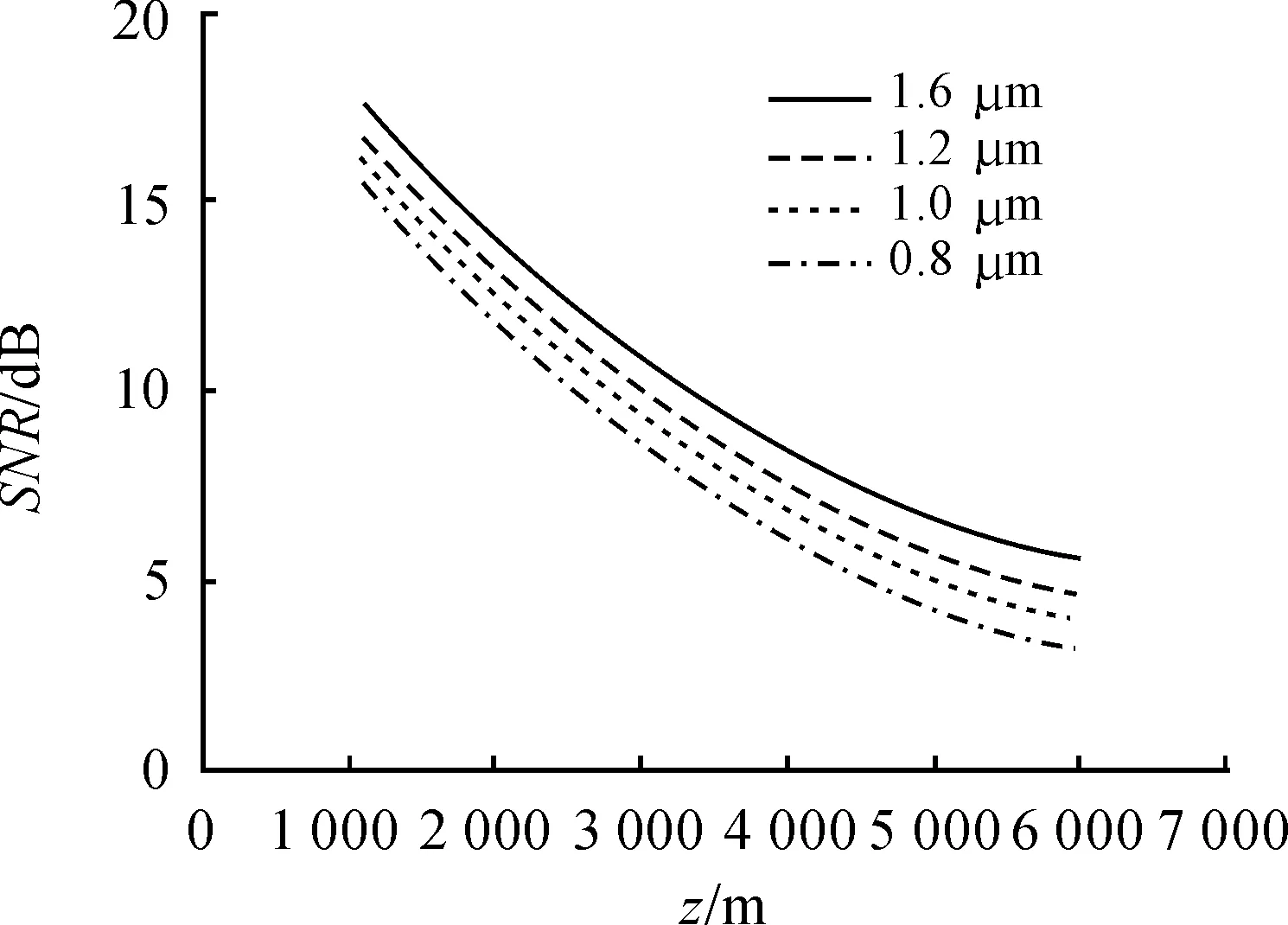
图6 信噪比随距离的变化(不同波长的激光)
3.2入射激光单脉冲能量的影响
云层对激光的衰减作用非常强,为了使得从目标反射的激光回波通过云层到达接收器的能量较强,入射激光单脉冲能量应该选得较强。参数设置如下:激光脉冲宽度为20 ns,波长为1.6 μm,目标距离接收器2 000 m,选通时间间隔40 ns。分别选取不同的单脉冲能量进行实验,比较其信噪比的变化,得到如图7所示的信噪比与单脉冲能量的关系。
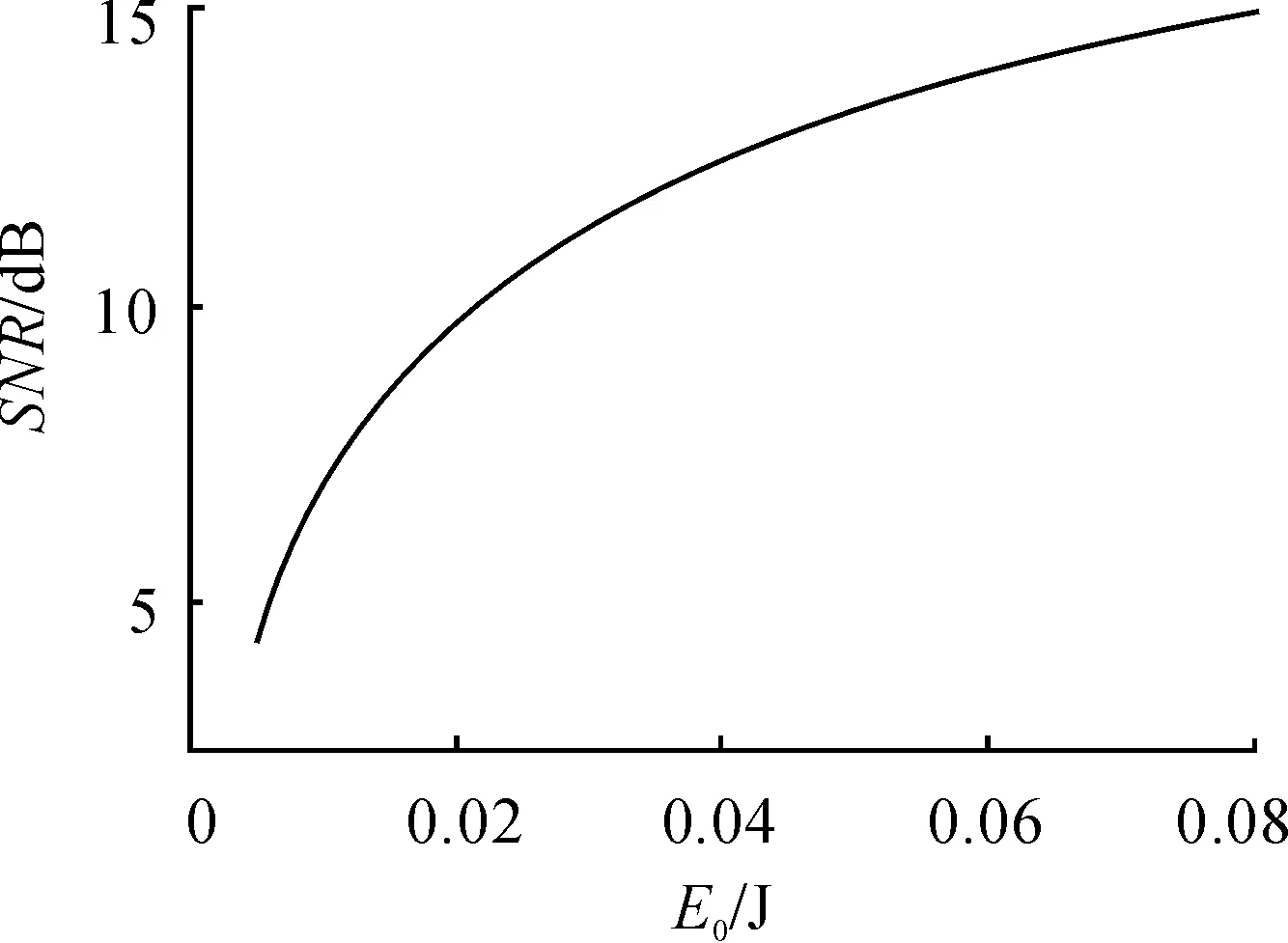
图7 信噪比与单脉冲能量的关系
从结果看出,单脉冲能量越大,信噪比越高。图8中的4幅图像分别为不同单脉冲能量下的成像,通过直观对比发现,单脉冲能量高的成像对比度和亮度较高,能够更加清晰地观察到目标物体的外部特征。因此,选择激光单脉冲能量较高的能取得更好的成像效果,而在现有实验条件下,高功率的脉冲激光器激光的单脉冲能量不可能很大,目前可选用单脉冲能量为60 mJ的Er:YAG激光器(1.6 μm),能取得较好效果[14]。
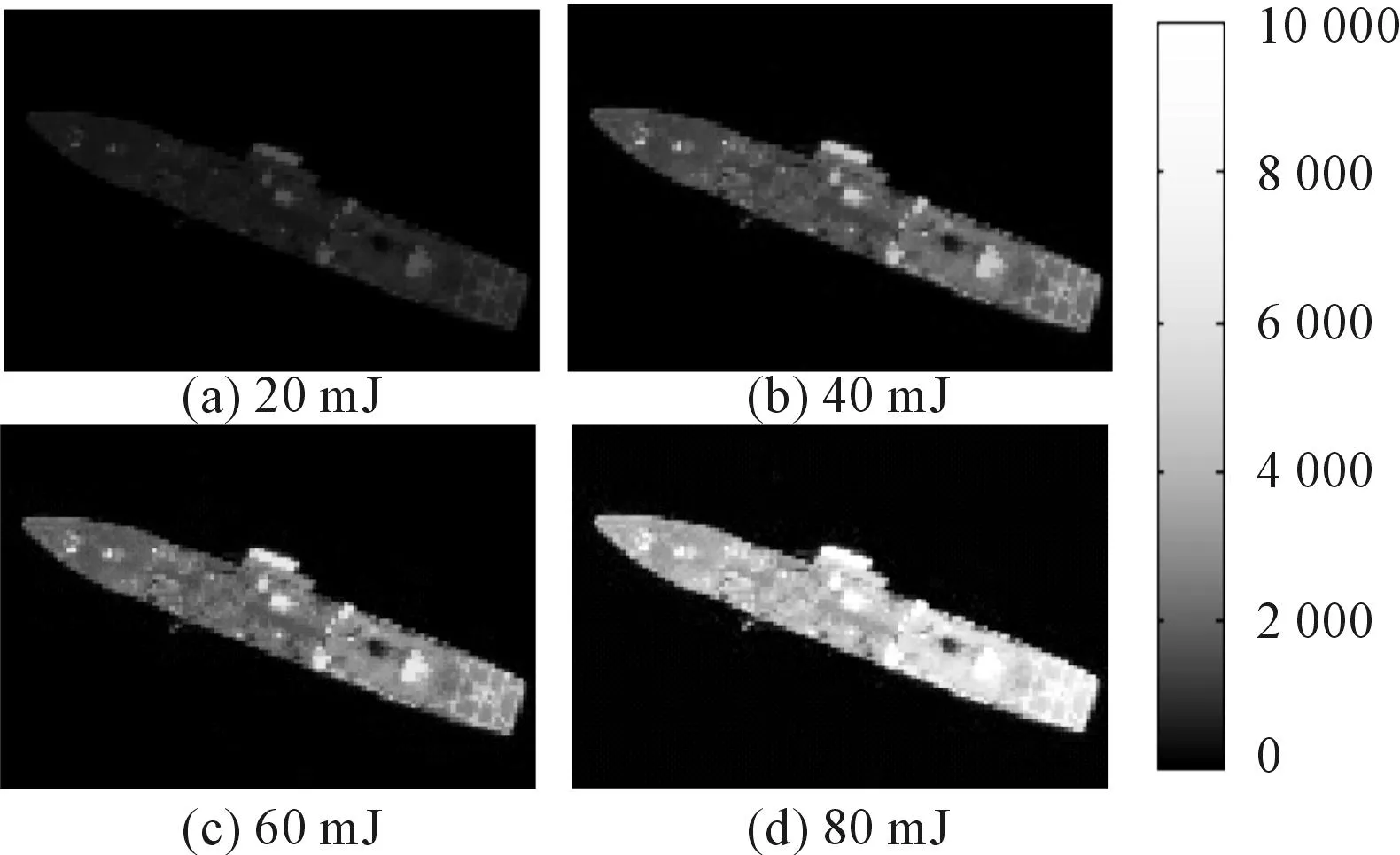
图8 不同单脉冲能量下的成像
3.3单幅图像的脉冲积分次数
本节探讨信噪比与单幅图像中积分脉冲个数的关系。在静态的距离选通成像系统中,有两种方法可以降低噪声提高信噪比。一种方法是对同一选通距离进行多次选通成像过程;另一种方法是在较长时间曝光内进行多次选通,将目标多次回波信号积分到一幅图像中。两种方法的区别在于,前者每次回波信号生成一幅图像,后者将多次回波信号积分成一幅图像。本节对第二种方法进行了仿真分析,选取激光单脉冲能量为60 mJ,其余参数设置与3.2中相同,选通次数分别从1选择到100次,得到的结果如图9所示。
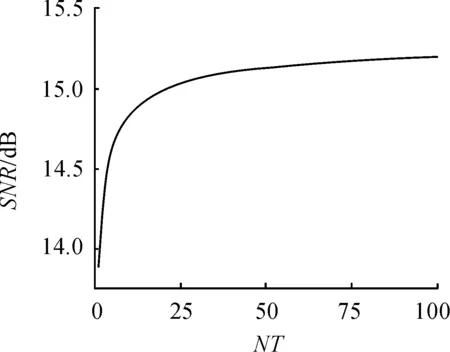
图9 信噪比与选通次数的关系
随着选通次数的增加,信噪比也随之增大,但当选通次数超过约25次后,信噪比增加不再显著,这是由于增加选通次数对多次回波信号进行积分,这样虽然增加了信号的强度,同时也使得噪声(背景噪声、光子散粒噪声等)强度增加。所以,在实际成像中,选通次数并不是越多越好,需要视具体情形而定。比如当单脉冲照射目标返回的光子数太少时,达不到探测器的灵敏度阈值,不能有效成像,有必要增加选通次数对多次回波信号积分以达到探测器的灵敏度阈值。
3.4脉冲宽度、探测器宽度以及选通距离的影响
为了分析脉冲宽度和探测器宽度的影响,对三维目标进行了仿真实验[15]。首先建立如图10中所示的三维塔形黑白靶作为目标物体,用该模型既能反映反照率信息,又能够反映深度信息,塔顶距离探测器2 000 m,塔身高度为4 m,每一层的高度为1 m。选取激光单脉冲能量为60 mJ,波长为1.6 μm,目标距离接收器2 000 m。

图10 三维塔形黑白靶
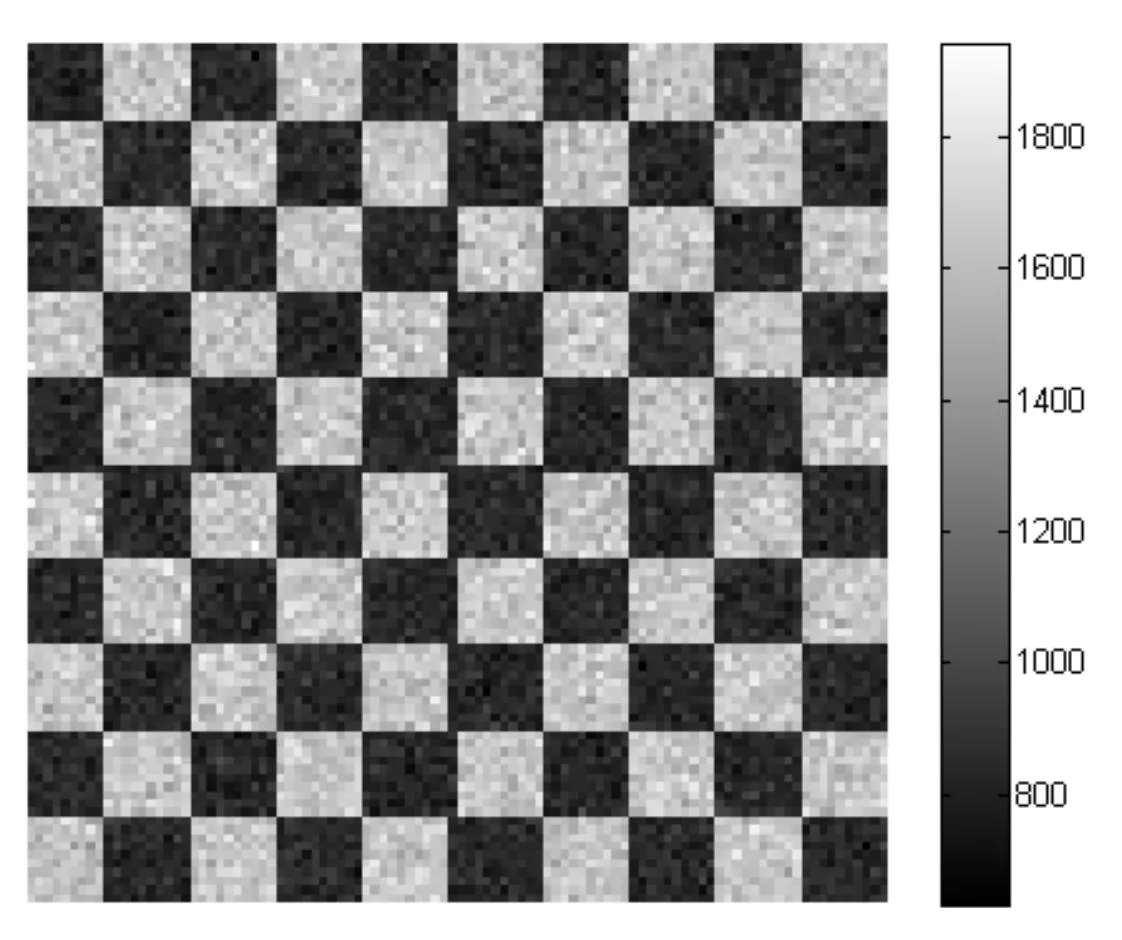
(1)首先讨论固定激光脉宽,改变探测器宽度对目标成像的影响(选通距离为2 000 m),在实际实验中,为了让激光的能量得到充分利用,通常探测器宽度要大于脉宽。因此,首先采用10 ns矩形激光脉冲和60 ns矩形探测器宽度,激光垂直三维目标靶俯拍(对准塔顶中心),得到的目标俯视图成像如图11(a)所示。
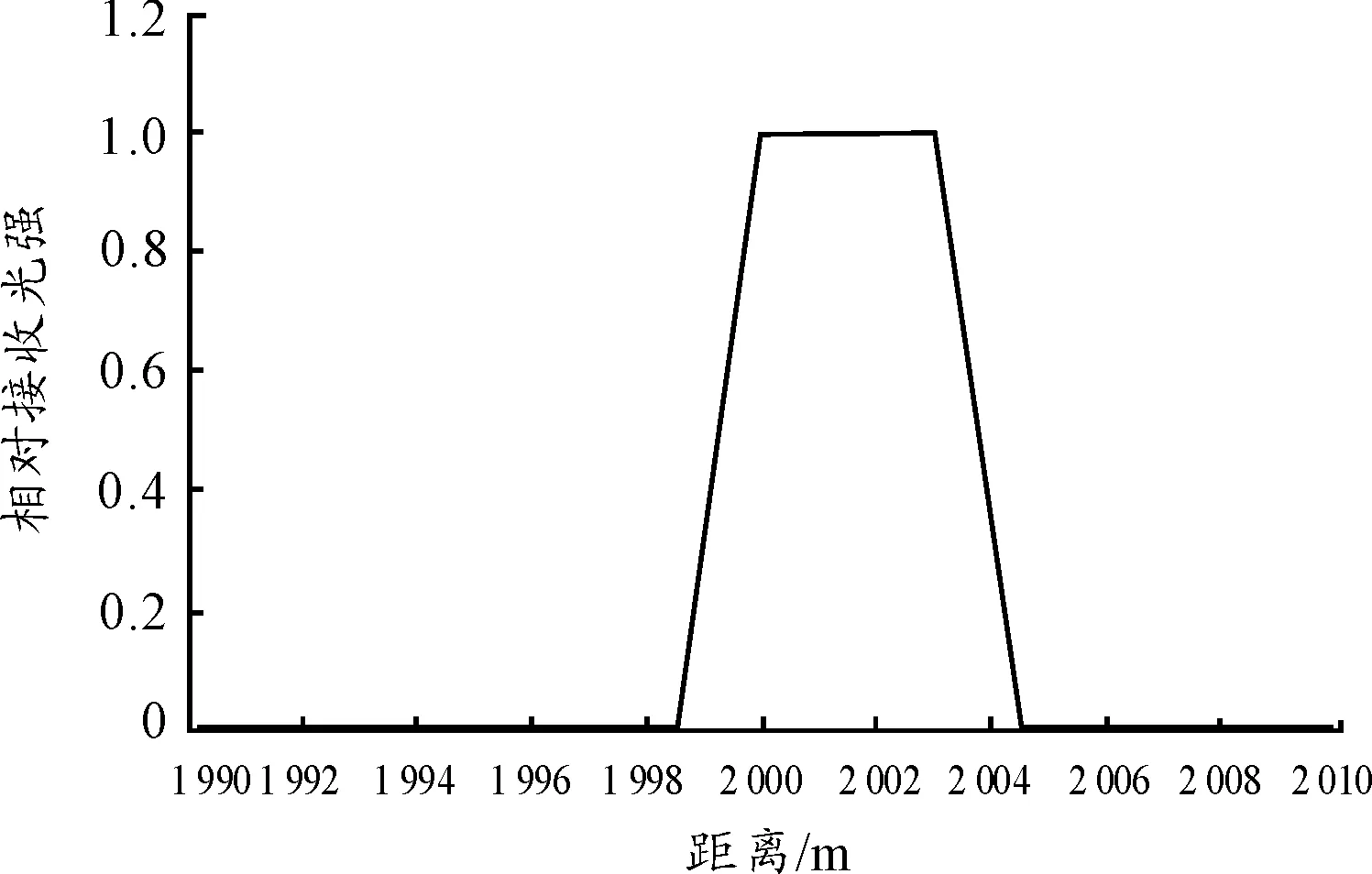
保持脉宽10 ns不变,分别减少探测器宽度至30 ns和10 ns,得到目标成像分别如图12(a)和13(a)所示。可以看到,目标成像出现显著的层次性,这是由(6)式的IPG(Z)因子引起的,CCD任一像元接收的光强是随着该像元对应的目标区域的距离而变化的。如图11(b)、12(b)和13(b),分别显示了脉冲宽度均为10 ns,而探测器宽度分别为60 ns、30 ns 和10 ns时的IPG(Z)函数图像。对于矩形脉冲和探测器宽度,像元相对接收光强随目标距离变化呈梯形,分为3段:上升区,平台区和下降区。探测器宽度相对于脉宽越大,平台区越大,这部分成像强度高且相对稳定。反之,探测器宽度越短,平台区短,将造成接收光强的层次性变化,因此,探测器宽度减小时,亮度变暗,且不同目标距离处成像的亮度也不同。
(a) 目标成像

(b) IPG(Z)函数图像
(b) IPG(Z)函数图像

(a) 目标成像

(b) IPG(Z)函数图像
(2)同理,如果固定探测器宽度、选通距离,改变脉冲宽度,探测器宽度与脉宽的相对大小改变,也会使得平台区的大小发生变化,从而成像效果也会受到同样的影响;如果固定探测器宽度、脉冲宽度,只改变选通距离,平台区所处的距离必然也会发生变化,进而成像也将受到影响。
综上,在实际选通成像系统中,要综合考虑脉冲宽度、探测器宽度以及选通距离的影响,使得IPG(Z)函数图像中的平台区尽量包含多的目标区域,这样才能得到稳定、均匀的目标图像。
另外,通过以上实验发现,如果目标处于IPG(Z)函数图像的上升区或者下降区,其成像效果会出现显著的层次性。为了更好地研究该层次性出现的原因,将脉宽和探测器宽度均设定为30 ns,然后分别选择2 000、2 001、2 002 m和 2 003 m 的选通距离,得到的目标成像如图14所示。
如图15所示,此时脉宽和探测器宽度相同,IPG(Z)函数图像只有上升区和下降区,没有平台区。这样使得不同距离的目标区域对应CCD像元接收到的光强是不同的,并且若该目标区域越靠近图像中的尖顶处(即为所设定选通距离),则对应CCD像元接收到的光强越大,最后成像越明亮。从图14中的4幅图可以看出,图像中成像最清晰、最明亮的部分即为该选通距离对应的目标区域。利用该原理,通过设定选通距离进行连续采样,不仅能够获得目标的强度像,还能够通过距离选通得到目标的距离信息。进一步地,当获取了完整的强度传递关系,便可以提取距离向信息,建立包含强度真实分布和距离信息还原的地物图像,即对目标的三维重建或者深度重建[16-17]。
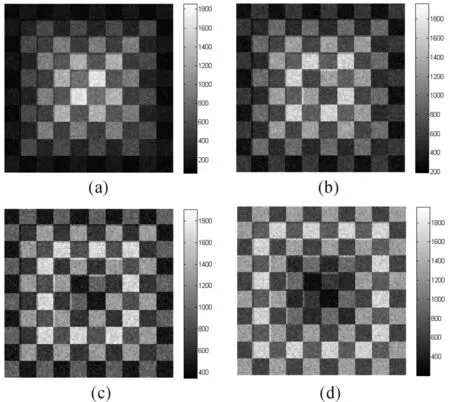
图14 不同选通距离下的的目标成像
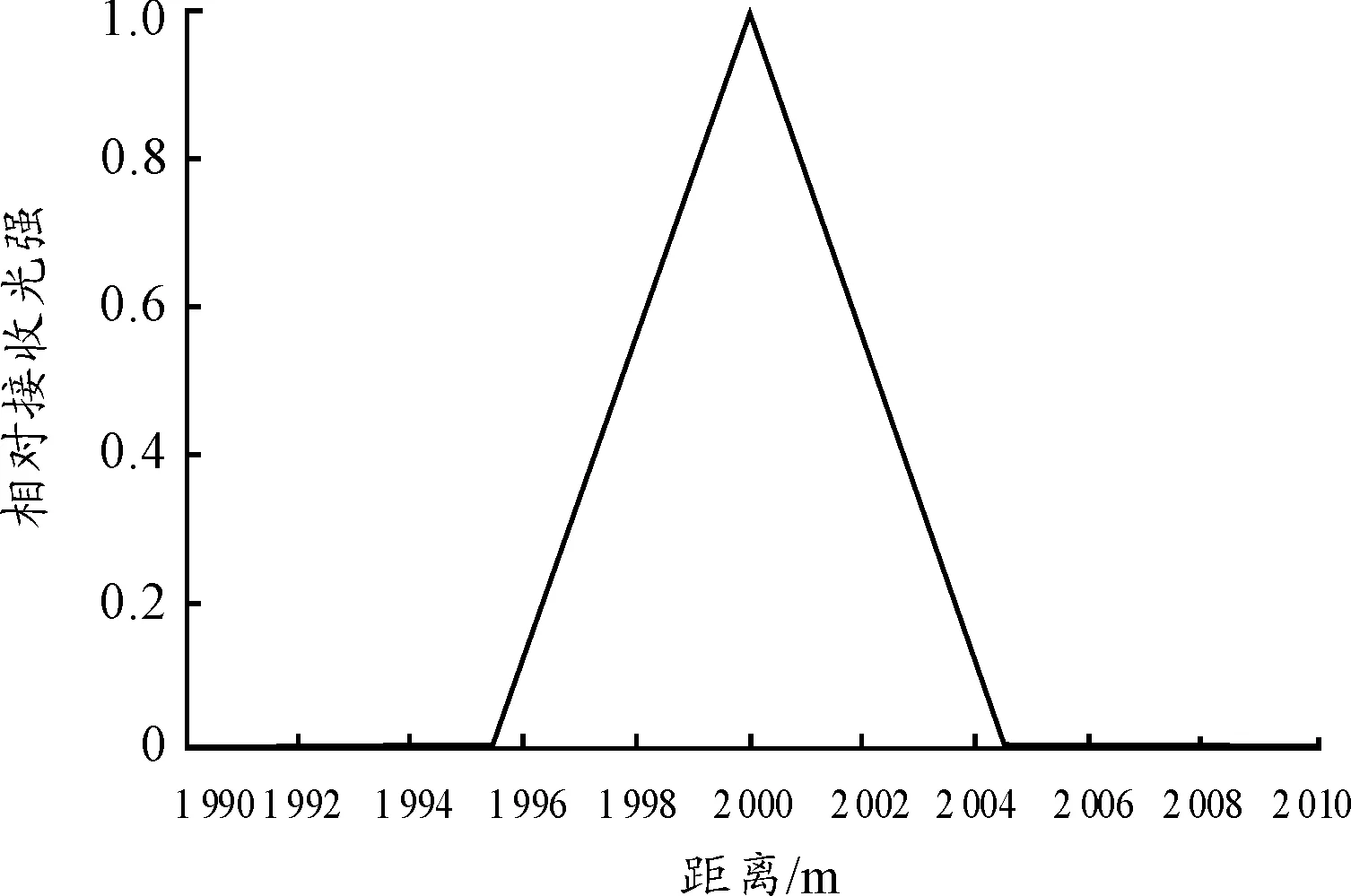
图15 选通距离下为2 000 m的IPG(Z)函数图像
4结论
结合距离选通成像原理,对成像的影响因素及主要参数进行了调节仿真分析,得到了参数的选取原则:应在现有实验条件下选取单脉冲能量较大的激光器,结合大气的吸收光谱以及信噪比与波长的关系,选取单脉冲能量为60 mJ、波长为1.6 μm 的Er:YAG激光器;增加选通次数可在一定程度上提高信噪比,特别是对于单脉冲照射目标返回的光子数太少情况,而具体的选通次数的选取要根据具体情况而定;要综合考虑脉冲和探测器宽度及选通距离使得目标距离处在强度分布函数中的平台区,这样才能得到更强、更稳定和均匀的目标图像。另外,可通过设定选通距离进行连续采样,获取目标的深度信息,进而对目标进行三维重建,这是下一步研究的方向。
参考文献:
[1]徐效文,付有余,郭劲.距离选通激光主动成像技术[J].半导体光电,2003,24(1):71-72.
[2]GRAUER Y,SONN E.Active gated imaging for automotive safety applications[C]// IS&T/SPIE Electronic ImagingInternational Society for Optics and Photonics,2015.
[3]WANG X,CAO Y,LIU C,et al.Low contrast target detection based on 2D/3D range-gated imaging[J].Infrared & Laser Engineering,2014(11):75-79.
[4]BONNIER D,LAROCHELLE V.Range-gated active-imaging system for search-and-rescue and surveillance operations[J].Proc Spie,1996(5):134-145.
[5]张伟,路远,杜石明,等.球形粒子Mie散射特性分析[J].光学技术,2010(6):936-939.
[6]徐娟.大气的光散射特性及大气对散射光偏振态的影响[D].南京:南京信息工程大学,2005.
[7]LAURENZIS M,CHRISTNACHER F,MONNIN D,et al.3D range-gated imaging in scattering environments[C]//SPIE Defense,Security,and Sensing International Society for Optics and Photonics,2010:78-83.
[8]张繁辉.距离选通激光成像数据处理方法研究[D].哈尔滨:哈尔滨工业大学,2010.
[9]王祥科,张辉,郑志强.激光主动成像图像制导导引头设计[J].红外与激光工程,2008,37(5):797-801.
[10]刘金国,李杰,郝志航.APS 星敏感器探测灵敏度研究[J].光学精密工程,2006,14(4):553-557.
[11]王辰,王宏强,陈明华,等.成像器噪声对星敏感器星等灵敏度的影响[J].红外与激光工程,2008,37(5):858-862.
[12]刘军平.大气物理学基础[M].北京:气象出版社,1993.
[13]张维录.基于Mie散射理论的磷化镓粒子散射特性[J].半导体光电,2011(5):661-664.
[14]LARAT C,SCHWARZ M,LALLIER E,et al.Eye-Safe Q-Switched Er:YAG MOPA Laser System[C]// Applications of Lasers for Sensing and Free Space CommunicationsOptical Society of America,2013.
[15]MARTIN L,FRANK C,DAVID M.Long-range three-dimensional active imaging with superresolution depth mapping[J].Optics Letters,2007,32(21):3146-3148.
[16]ANDERSSON P.Long-range three-dimensional imaging using range-gated laser radar images[J].Optical Engineering,2006,45(3):034301-034301-10.
[17]WANG X,LI Y,ZHOU Y.Multi-pulse time delay integration method for flexible 3D super-resolution range-gated imaging[J].Optics Express,2015,23(6):7820-31.
[18]GUAN J,ZHU J.Target detection in turbid medium using polarization-based range-gated technology[J].Optics Express,2013,21(12):14152-14158.
[19]LI S,YAN X,WANG W,et al.3D reconstruction of large target by range gated laser imaging[C]//SPIE/COS Photonics AsiaInternational Society for Optics and Photonics,2014:927325-927325-6.
(责任编辑杨继森)
本文引用格式:谭小波,衣文军,唐武盛,等.距离选通成像的主要参数调节仿真分析[J].兵器装备工程学报,2016(4):74-80.
Citation format:TAN Xiao-bo, YI Wen-jun, TANG Wu-sheng, et al.Simulation on Adjusting Main Parameters for Range Gated Imaging System[J].Journal of Ordnance Equipment Engineering,2016(4):74-80.
Simulation on Adjusting Main Parameters for Range Gated Imaging System
TAN Xiao-bo, YI Wen-jun, TANG Wu-sheng, LI Xiu-jian, YANG Jian-kun
(College of Science, National University of Defense Technology, Changsha 410073, China)
Abstract:Laser range-gated active imaging technology can largely suppress interference from back-scattering of the atmosphere and ambient light and can obtain high-resolution and high-contrast images. The technology has a broad application prospects in the field of target detection, identification and so on. Therefore, it is very important to determine the parameters of the range gated imaging system. Based on the principle of the range gated imaging, the energy and noise that the detector obtains were estimated, and then the signal to noise ratio of the image was obtained, and the parameter model of imaging was established. Furtherly, the influence factors and the main parameters of the imaging system were analyzed through the simulation experiments, and the selection principle of the system parameters was obtained.
Key words:laser active imaging; range-gated; SNR; parameter model; parameter adjusting simulation
文章编号:1006-0707(2016)04-0074-07
中图分类号:TN249
文献标识码:A
doi:10.11809/scbgxb2016.04.019
作者简介:谭小波(1992—),男,硕士研究生,主要从事光学图像采集处理研究。
基金项目:国家自然科学基金资助项目(61070040)
收稿日期:2015-09-22;修回日期:2015-10-22
【光学工程与电子技术】
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
电子技术与软件工程(2021年14期)2021-09-23
北京理工大学学报(2021年8期)2021-09-14
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
舰船电子对抗(2018年2期)2018-06-19
雷达学报(2017年3期)2018-01-19
弹箭与制导学报(2017年5期)2017-08-15
科技创新与应用(2017年6期)2017-03-23
