关于串联弹簧振子的研究
2016-05-24 01:07黄建博王四海
物理实验 2016年4期
黄建博,苏 壮,王四海
(北京邮电大学a.信息与通信工程学院;b.理学院,北京100876)

关于串联弹簧振子的研究
黄建博a,苏壮a,王四海b
(北京邮电大学a.信息与通信工程学院;b.理学院,北京100876)
摘要:利用微分方程和拉普拉斯变换研究串联弹簧振子系统的运动规律,推导其运动方程,分析频率分量以及波峰-波谷比的极值条件. 串联弹簧振子系统运动是若干正弦运动的叠加,频率分量的个数等于串联的弹簧个数,在某些条件下这些频率分量还会趋于相等.
关键词:串联弹簧振子;胡克定律;拉普拉斯变换;傅里叶变换
振子在弹簧的回复力作用下做正弦运动,其动力学方程为
F=-kx=ma,
(1)
运动学方程为

(2)
由以上两式可得
mx″+kx=0 ,
(3)
或

(4)
x(t)=Acos (ωt).
单个振子在弹簧回复力作用下做离平衡点的位移随时间成正弦变化的运动,位移对时间求导可以得到其速度随时间的变化也是正弦变化,速度对时间求导又可得到其加速度随时间成正弦变化. 那么这一系列性质对串联的双弹簧系统是否适用呢?各个弹簧的位移随时间怎样变化呢?进而,当有n个弹簧振子串联时它们的运动规律又是怎样的呢?基于这些问题,本文推导了多弹簧振子的位移表达式,并使用Matlab软件仿真表现出振子的位移波形,进而提出一种可能的教学演示模具.
1二元串联弹簧振子的运动
1.1方程求解
2个弹簧振子串联(如图1所示),研究m2的运动. 轻弹簧劲度系数分别为k1和k2,原长分别为l1和l2,物体质量分别为m1和m2,水平面光滑. 初态,弹簧k1伸长量为A1,k2伸长量为A2,即x1(0)=A1,x2(0)=A1+A2. 设m1相对其平衡位置(l1处)位移为x1,m2相对自身平衡位置(l1+l2处)位移为x2.
动力学(微分)方程:
-k1x1+k2(x2-x1)=m1x1″,
(5)
-k2(x2-x1)=m2x2″.
(6)

图1 二元串联弹簧振子
联立方程组消去x1得:

(7)
特征方程:
m1m2r4+(m1k2+k1m2+k2m2)r2+k1k2=0.
(8)
解得特征根:
其中,

(13)

(14)
方程的解:
其中

(17)

(18)
2个串联弹簧振子的运动最终趋向等幅振荡. 函数x2(t)只含Ω1和Ω2频率分量,设
x2(t)=C11cos (Ω1t)+C12sin (Ω1t)+
C21cos (Ω2t)+C22sin (Ω2t),
(19)
其中C11,C12,C21,C22为待定常量.
初值:
代入(19)式有
C12=C22=0.
于是,改设
x2(t)=C1cos (Ω1t)+C2cos (Ω2t),
(20)
C1和C2为待定常量. 再次代入初值有
解得
该系统中,外侧小球的运动是2个简谐振动的叠加,2个简谐振动的频率和振幅都不等于弹簧的本征频率和形变量,而是后者的变换.
1.2解的讨论
因为第2个小球的运动更易于观察,所以这里只对第2个小球的运动方程进行讨论. 联立式(13),(14),(17),(18),(20),(23),(24)可知,改变m1与m2之比或k1与k2之比就会改变x2(t). 设kr=k1/k2,mr=m1/m2,取A1=A2,则x2(t)随kr和mr而变化. 取kr=mr=1,运动方程图形如图2.

图2 k1=k2,m1=m2时系统位移函数图像
该波形具有以下缺点:
a.波形缺乏规律性;
b.波峰参差不齐;
c.如果连接波峰得到一条包络线的话,包络线的起伏非常小.
以上缺点都给观测带来困难. 现在从连接波峰的包络线入手,以期获得一条起伏尽可能大的包络线. 借助Matlab工具[1],研究方法如下:
1)kr和mr从1∶10到10∶1各取若干个值,两两组合后得到取值组合的二维矩阵.
2)每个取值组合用表达式计算1个运动方程,获取该波形的所有峰值并取绝对值得到绝对幅值向量f.
3)取出f中的最大值fmax和最小值fmin,计算两者之比R=fmax/fmin.
4)重复2)和3)得到二维矩阵R,以lgkr和lgmr为自变量(既保留单调性又获得对称性),R为因变量作二元函数图像,观察获取使r尽可能大的组合(kr,mr).
如上方法得到图像如图3所示,图中有明显的尖锋,这意味着,2个弹簧振子的劲度系数比和质量比在某些组合下串联后的效果最佳. (图中大多数地方并不平坦,只是峰值太大,起伏不明显.)

图3 波峰-波谷比与劲度系数比和质量比的关系
取kr=1,波峰-波谷比与质量比的关系如图4所示. 由图4可知,kr=1,mr=5时现象显著,在该处x2(t)仿真波形如图5所示.

图4 波峰-波谷比与质量比的关系(相同劲度系数)

图5 k1=k2,m1=5m2时系统位移函数图像
该图像可观察到振幅周期性变化.
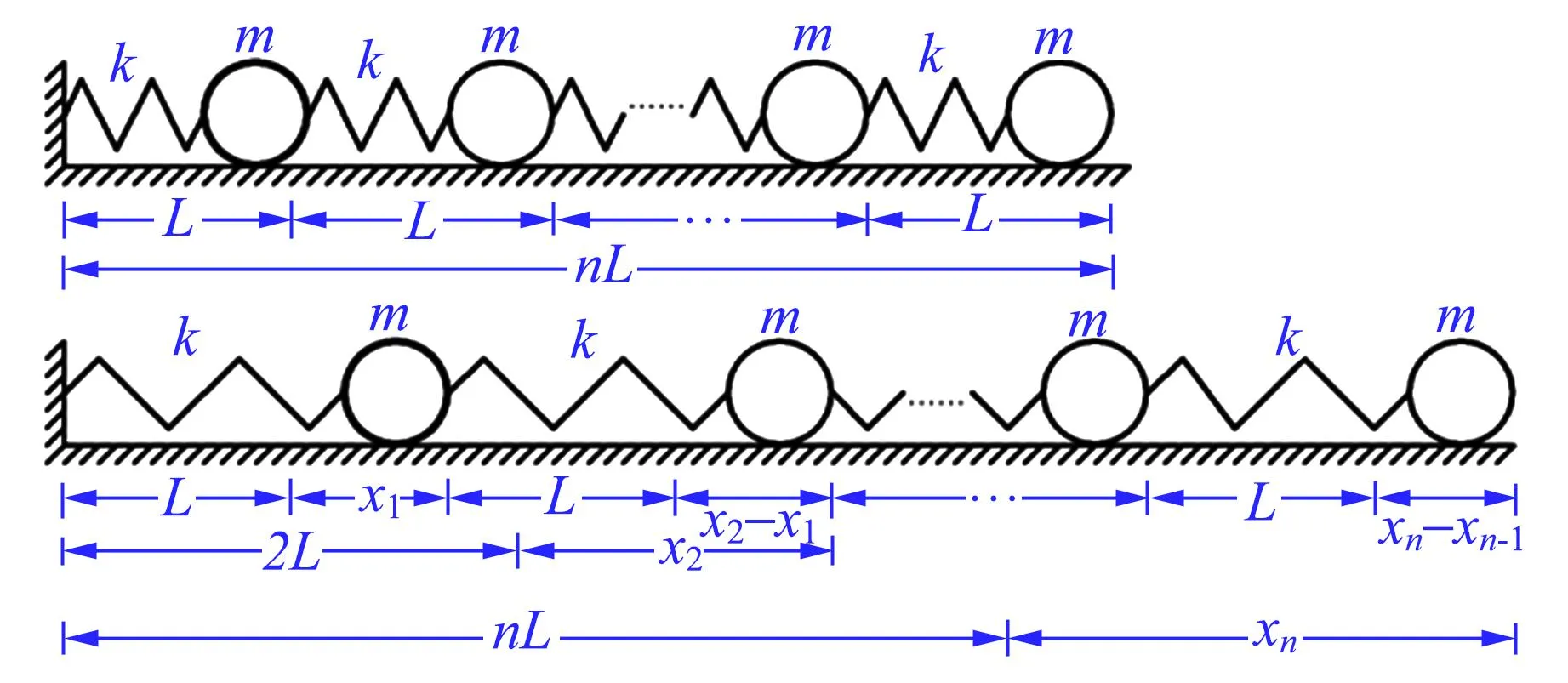
在上述讨论中,采用的指标为R=fmax/fmin,下面尝试使用指标r=fmin/fmax,得到图6. 可以看出0 图6 波谷-波峰比与劲度系数比和质量比的关系 图7 fmin(kr,mr)=fmax(kr,mr)真值分布 k1∶k2m1∶m2Ω1Ω2C1C26∶110∶10.711.202.00→011∶29∶10.711.112.00→05∶18∶10.711.122.00→09∶27∶10.711.132.00→04∶16∶10.711.152.00→07∶25∶10.711.182.00→03∶14∶10.711.222.00→05∶23∶10.711.292.00→02∶12∶10.711.412.00→03∶21∶10.711.732.00→01∶31∶80.302.071.950.05 前10个取值得到的运动方程都近似为: (25) 串联的弹簧振子在kr=0.5mr+1(mr≥1)时,其振动接近于1个弹簧振子. 2n元弹簧振子串联的运动 2.1特殊情况 如图8所示,n个相同的弹簧振子串联,弹簧劲度系数均为k,小球质量均为m,初态下每根弹簧有相同伸长量A. 图8 n元串联弹簧振子 设小球相对平衡位置位移为x1,x2,…,xn, 对第1个小球有 mx1″=-kx1+k(x2-x1) , 对第2个小球有 mx2″=-k(x2-x1)+k(x3-x2), 同理对第n个小球有 mxn″=-k(xn-xn-1), 为方便计算,令x0=0,xn+1=xn,整理得: 通式为 mxi″=-k(xi-xi-1)+k(xi+1-xi),(1≤i≤n) (29) 将通式进行拉普拉斯变换得 -ω2Xi-1(s)+(s2+2ω2)xi(s)-ω2Xi+1(s)=iA. (1≤i≤n) (30) 2.2一般情况 受特殊情况系数矩阵的启发,下面再讨论更一般化的情况:设n个相同的弹簧振子串联,弹簧劲度系数为k1,k2,…,kn,小球质量为m1,m2,…,mn,初态下弹簧伸长量A1,A2,…,An. 令x0=0,xn+1=xn,kn+1=0,类似前述分析可得方程组如下: 通式为 mixi″=-ki(xi-xi-1)+ki+1(xi+1-xi), (1≤i≤n) (34) 将通式进行拉普拉斯变换[2]得 -kiXi-1(s)+(mis2+ki+ki+1)xi(s)- (35) 该方程组有n个解,分别是位移x1(t),x2(t),…,xn(t)的拉普拉斯变换式X1(s),X2(s),…,Xn(s). 每个解的分母均为方程系数矩阵的行列式,因此有相同的极点,对应的位移函数也包含着相同的频率分量. 计算|D|=0即可得到极点[3]. 有几个弹簧振子串联,就会有几对极点,最终的运动方程就会有几个频率分量[2]. 3应用前景 国内众多高校都设有信息与通信类以及电子信息类院系,傅里叶变换是这些专业的学生必须掌握的基础理论,然而思维方式由时域到频域的转换是很多学生学习这一理论的难点. 本文的研究成果,可以凭借简单的物理器件(图9)演示出不同频率正弦波叠加的效果,再结合相关的电子测量设备[4-5],就可以直观表现出频率叠加在时域和频域的不同表现形式,让学生深刻地体会傅里叶变换的内涵和精妙. 图9 测量仪器 参考文献: [1]沈昊. 利用手机研究简谐运动[J]. 物理实验,2014,34(4):15-18. [2]郑君里,应启珩,杨为理. 信号与系统引论[M]. 北京:高等教育出版社,2009:174-266. [3]刘吉佑,莫骄. 线性代数与几何[M]. 北京:北京邮电大学出版社,2004:26-29. [4]门爱东,苏菲. 数字信号处理[M]. 北京:科学出版社,2009:106-122. [5]邹振春. MSC51系列单片机原理及接口技术[M]. 北京:机械工业出版社,2006:93-103. [责任编辑:郭伟] Research on spring oscillator chain HUANG Jian-boa, SU ZHUANGa, WANG Si-haib (a. School of Information and Communication Engineering; b. School of Science,Beijing University of Postal and Telecommunication, Beijing 100876, China) Abstract:By the method of differential equation and Laplace transformation, the motion equations of spring oscillator chain were figured out, and its frequency components as well as the extreme conditions of peak-to-trough ratio was researched. The movement of the system was consisted as the combination of several sinusoidal motions, and these frequency components, which tend to be equal in some conditions, were as many as the springs in the chain. With the assistance of electronic measuring technology, it was likely that a new teaching demonstration instrument of Fourier transform would be developed based on this theory. Key words:series spring oscillator; Hooke law; Laplace transformation; Fourier transformation 中图分类号:O321 文献标识码:A 文章编号:1005-4642(2016)04-0032-05 作者简介:黄建博(1994-),男,广东廉江人,北京邮电大学信息与通信工程学院通信工程专业2013级本科生.指导教师:王四海(1966-),男,四川大邑人,北京邮电大学理学院物理系高级工程师,硕士,从事大学物理演示实验教学工作。 基金项目:北京邮电大学大学生研究创新基金(No.X-201510013008);北京市共建项目专项 收稿日期:2015-11-01;修改日期:2015-12-20 “第12届全国高等院校物理演示实验教学研讨会”论文