
适用于高速铁路的三相四开关型滤波器的电流重复控制设计
2016-05-22 09:21常文寰
电力自动化设备 2016年2期
王 果,周 末,常文寰
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
0 引言
随着我国高速铁路建设步伐的加快,对电力行业产生的影响越来越大。由于高速铁路采用的交-直-交牵引传动系统以及其运行的随机性、波动性和不对称性,引起的高次谐波、负序问题影响公共电网的电能质量[1]。需要注意的是,高速铁路的谐波含量虽然符合国家标准,但是其所含的高次谐波易与系统产生高次谐振,影响系统的正常运作。因此在高速铁路中,有效地消除高次谐波和负序是目前学者的主要工作[2]。有源电力滤波器APF(Active Power Filter)凭借其优越和稳定的补偿性能,拥有较高的学术研究价值和性价比,得到了专家学术界的关注,并逐步被应用于对牵引变电所的综合补偿中。
现有的APF多为三相六开关结构,该结构需要三相桥臂的功率开关管,模块体积较大,开关损耗较高,因此器件成本和散热设计成本较高。本文采用的三相四开关并联型APF拓扑结构,与六开关逆变器相比减少了一对功率开关器件,电路设计将更加简单,功率器件总体功耗也会有所减少,控制策略也相对简单,适合于中大功率场合的应用[3-5]。
常用于电气化铁路的APF电流控制方法多为三角载波调制法、PI控制和滞环控制等。因为高速铁路中的谐波中含有高频成分,PI控制法的带宽有限,当需要跟踪高次谐波时,不能实现无静差的快速跟踪,导致系统的补偿效果变差;三角波法会向系统中引入三角载波频率,这种高次频率可能与系统产生谐振,而且在高速铁路中,高次谐波也是治理目标,因此三角载波调制法不适用;滞环控制的缺陷是控制精度不高,其开关频率变化,导致系统损耗变大,而且其中某些频率可能会与系统发生谐振。基于内模原理的重复控制能有效跟踪多种频率叠加的谐波信号,在APF中得到了广泛应用[6-7]。本文采用重复控制策略,这种控制方法可以根据应用对象灵活设计系统频率,现有的重复控制设计一般仅要求跟踪20次左右频率的谐波,而在高速铁路中需要跟踪的谐波频率高达150次,因此需针对这种负载特性设计控制器参数。
本文首先分析三相四开关并联型APF系统模型,并将重复控制应用于高速铁路的有源补偿中,利用重复控制可以无静差地跟踪周期性干扰的特点提高APF的补偿性能,同时重复控制引入快速通道,保证系统良好的动态性能。针对高速铁路负载特性,建立MATLAB仿真模型。仿真结果证明了所提模型及控制策略的有效性。
1 三相四开关并联型APF系统
1.1 三相四开关并联型APF系统的拓扑结构
本文采用的并联型APF系统拓扑结构如图1所示。针对我国高速铁路系统情况,本文采用V/v牵引变压器对机车进行牵引。APF的A、B两相由IGBT和续流二极管组成,C相接于直流侧电容C1和C2的中点,三相经输出电感L与供电臂相连接。由于减少了1对功率开关器件,与六开关逆变器相比,驱动电路设计将更加简单,功率器件总体功耗也会有所减少,适合于中大功率场合的应用。由于这种结构仅需控制AB两相桥臂,因此只需针对这两臂设计控制器即可实现对变流器的控制。
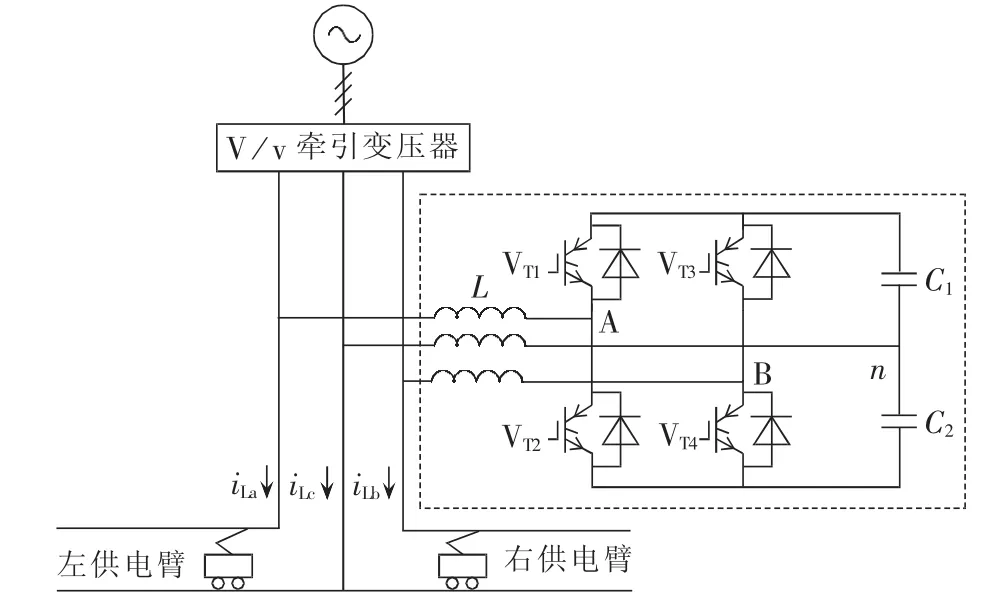
图1 电气化铁路三相四开关APF拓扑结构Fig.1 Topological structure of three-phase four-switch APF for electrified railway
1.2 三相四开关并联型APF原理分析
图2为由图1简化的三相四开关APF拓扑结构。以电感电流和电容电压为状态变量,列写APF中三相四开关逆变器的数学模型。
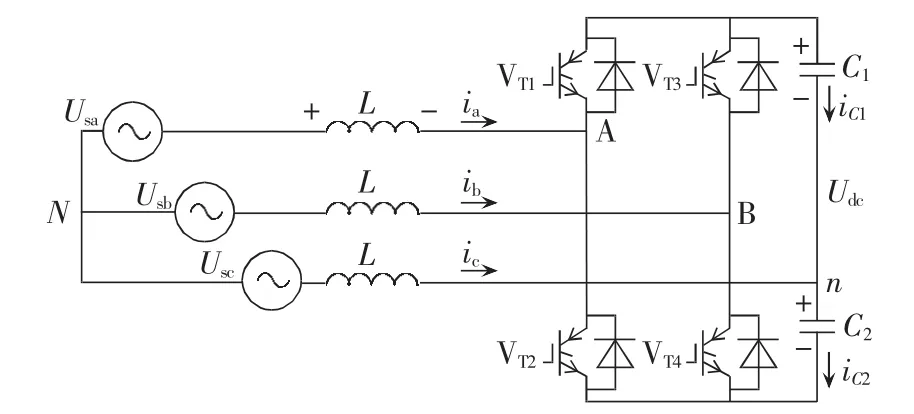
图2 简化的三相四开关APF拓扑结构Fig.2 Simplified topological structure of three-phase four-switch APF
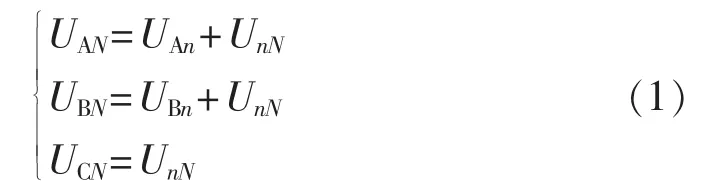
Usa、Usb、Usc分别为耦合变压器低压侧等效电源;UAN、UBN、UCN为输出电压;UAn、UBn、UCn为输出线电压;n为直流母线中点;N为等效电源中性点;UnN为n、N间电压。由基尔霍夫电压定律可得:
对于平衡的三相系统有:

将式(2)代入式(1)可得:

Sx为开关管状态,x 取 1、2、3、4 时分别对应 VT1、VT2、VT3、VT4,Sx=1 为闭合状态,Sx=0 为断开状态。
结合式(1)—(3)可得:


三相输出电流由直流母线中点与电源中性点间电压与交流侧电压作差后产生,因此有电压回路方程:
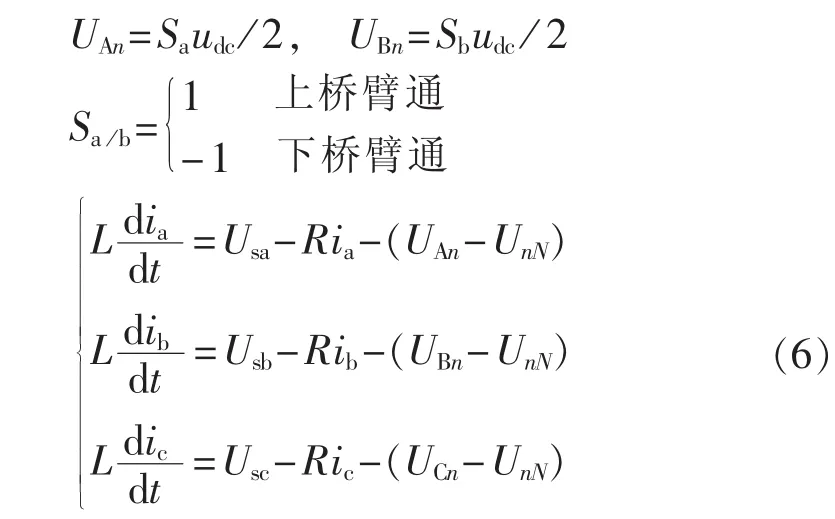
其中,R为电感L的等效电阻。
由式(4)—(6)可知,控制 AB两相桥臂的 4个开关管即可控制A、B相输出电流的大小,并进一步控制C相电流。而且由式(6)可知,三相桥臂没有耦合关系,因此无需解耦也可分别设计控制器实现对AB两相的控制。
2 基于重复控制的电流跟踪控制策略
2.1 重复控制基本原理
重复控制是20世纪80年代根据实际控制工程的需要提出的一种新型控制系统设计方法,当重复地进行相同的操作时,操作人员基于上次的操作结果适当地调节当前的操作行为,逐渐地变得熟练,最终成为熟练技师,实现高精度的操作,东京工业大学中野道雄教授受到人类从事重复工作的启发,提出基于人类学习过程的重复控制方法。不同于其他方法,重复控制系统中存在着基于以前的控制结果对当前的控制行为进行调节的过程,这个过程是该控制方法的关键[8]。
重复控制的控制思想基于内模原理。“内模”是指在稳定的闭环控制系统中包含外部输入信号的数学模型。“内模原理”表述为:对于一个控制系统,如果控制其的反馈来自被调节的信号,且在反馈回路中包含相同的被控外部信号动态模型,那么整个系统是结构稳定的。内模原理的本质是把系统外部信号的动力学模型植入控制器以构成高精度的反馈控制系统。这样的系统能够无静差地跟踪输入信号[9]。
2.2 重复控制的结构与功能
图3为本文采用的重复控制结构,虚线部分为指令前馈通道,也称“嵌入式结构”,用于改进系统的稳定性和跟踪性。P(z)为被控对象,r为需要跟踪的重复指令,即APF实际产生的补偿电流重复控制器检测指令r与实际输出y之间的误差e,由内模对误差e进行逐周期积分,在误差消失或变得很小的时候仍输出与上一周期相同的控制量。滤波器Q(z)用于改进传统重复控制器,在Z-N前插入1个带限滤波器Q(z),使系统在单位圆上的极点发生偏移到单位圆内,提高系统的稳定性,一般为略小于1的常数或低通滤波器。前向串联通道上的周期延时环节Z-N,使控制动作延迟1个周期进行,即本周期检测的误差在下一周期影响控制量,也可以理解为系统在下一周期预知上个周期的误差,具有超前性。补偿器C(z)针对被控对象P(z)的幅频特性进行设计,提供幅值和相位补偿至满足滤波器性能所要求的范围内,使重复控制系统稳定[10-12]。补偿器C(z)一般采用以下形式:

其中,zk为超前环节,起相位补偿作用;Kr为重复控制增益;S(z)为滤波器。 S(z)主要有以下作用:将被控对象中低频段增益校正为1,方便后续设置Kr;抵消被控对象的谐振峰值;增强前向通道的高频衰减特性,提高控制器的稳定性和抗干扰性。

图3 重复控制系统示意图Fig.3 Schematic diagram of repetitive control system
利用控制理论中的小增益原理可以导出控制系统稳定的充分必要条件为:

其中,T为采样周期。
因此设计重复控制结构需要根据以上要求并验证其稳定性,才能精确并高效跟踪指令电流。
2.3 改进重复控制器的设计
以主电路A相为例讨论控制法的设计,A相等效电路如图4所示。图4中,ea为电网A相电压;ua为主电路输出的三相电压;电感L起平波和滤波的作用;R为电感的等效电阻。设计参数如下:采样频率为10 kHz,滤波电感 L为1 mH,电感等效串联电阻 R 为 0.5 Ω[13]。

图4 主电路A相的等效电路Fig.4 Equivalent circuit of main circuit for Phase-A
2.3.1 被控对象P(z)
电压型逆变器发出的电压经过滤波电感L转换为电流信号注入电网,为此本系统的控制对象为RL模型,可以求得其传递函数为:

对上式进行零阶保持离散化得到其在离散域中的模型:

其中,零阶保持器的传递函数为 Gh0(s)=(1-e-Ts)/s。
分析受控对象的数学模型P(z)可知,该控制对象为一个典型的一阶惯性环节,Bode图如图5所示。可以看出,控制对象不存在谐振,但幅值从100 Hz开始衰减,随着频率的增加,衰减程度越大,从相位特性可以看出,系统相位从低频段就开始变化,从0°到滞后90°,始终存在相位差,导致不能及时跟踪指令电流,严重影响APF的补偿性能。
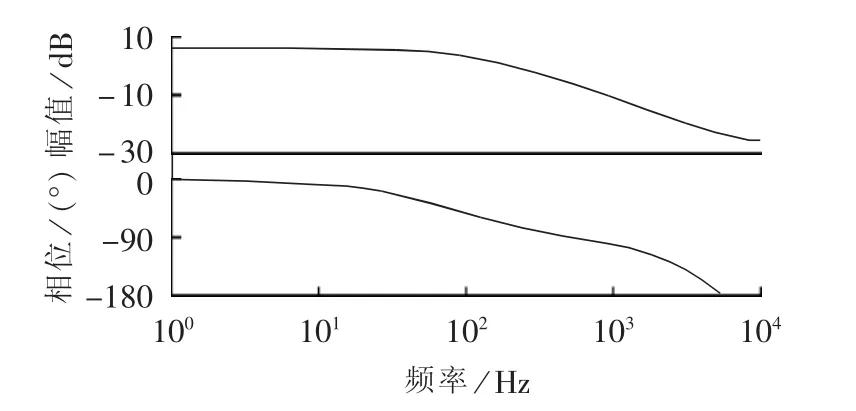
图5 P(z)的 Bode 图Fig.5 Bode diagram of P(z)
从上述分析可知,未经校正的逆变器不存在谐振,因此不需要设计抵消谐振峰的滤波器。低频段有大约6 dB的增益放大,且截止频率约为138 Hz,即仅能及时跟踪138 Hz的谐波,相频特性上存在相位滞后,因此需设计S(z)使中低频段增益为1,并引入超前环节弥补幅值误差。由于运用在电气化铁路中,因此要求校正后控制器的带宽较大,至少能实现100次谐波的跟踪,因此要求校正后的截止频率至少为5000 Hz。另外若使逆变器有较好的跟踪性能,校正后的逆变器频率特性应为0 dB,相位特性也为 0°。
2.3.2 补偿器C(z)
补偿器C(z)的设计目的是在频率范围内,把控制对象幅值校正到0 dB,相位校正到0°,以实现系统良好的稳态精度和稳定性。
相位误差引入超前环节来校正,目的是弥补被控对象在中低频段的相位滞后。根据控制理论中超前校正的知识,设计一个超前环节对被控对象进行校正。令:

再引入一个比例环节将被控对象的中低段增益校正为1:

即校正环节在z域的传递函数为:

式(10)、(13)相乘得:

图6绘出了S(z)对控制对象的校正,包括被控对象的幅频特性、校正环节的幅频特性以及校正后的幅频特性。可以看出,经过校正环节补偿以后,被控对象的中低频段增益被校正为1 dB,接近要求的0 dB,同时这部分的相位滞后也得到了补偿,符合设计要求。关键是系统的带宽比校正前增宽,截止频率被提升到4000 Hz,即可以无静差跟踪80次谐波,满足高速铁路谐波抑制的要求。
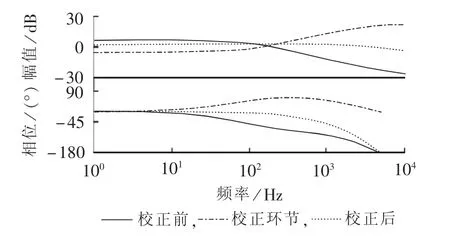
图6 经S(z)校正前后被控系统的Bode图Fig.6 Bode diagram of controlled system,with and without correction by S(z)
从图6可以看出,系统在高频段的幅值衰减非常缓慢,缺乏对高频段的抗干扰能力,因此还需设计一个低通滤波器加快高频段的衰减。本文采用二阶滤波器。观察图6知,在9 kHz处幅值增益降为0,因此低通滤波器的转折频率设为8.5 kHz,阻尼系数ζ=0.707,二阶低通滤波器在s域及经tustin法离散后z域的传递函数分别为:

式(14)—(17)相乘得:

其Bode图如图7所示。

图7 二阶LPF Bode图Fig.7 Bode diagram of 2nd-order LPF
补偿后的系统Bode图如图8所示,可看出采用二阶低通滤波器后,系统的高频衰减特性增强,稳定性和高频干扰能力增强。
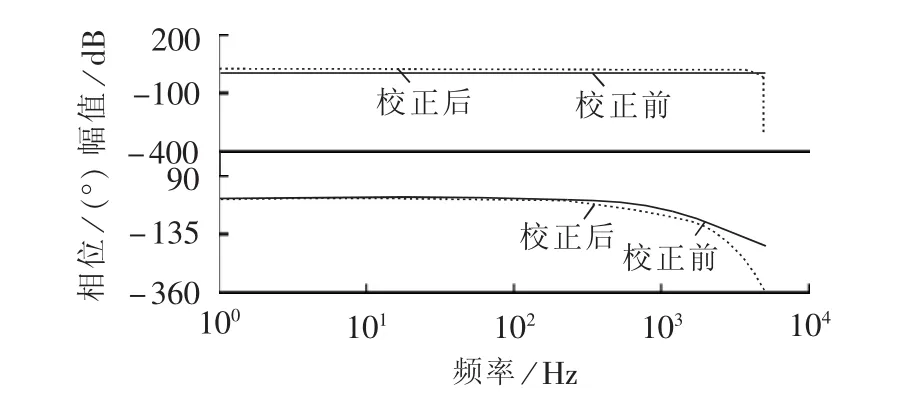
图8 经LPF补偿前后的系统Bode图Fig.8 Bode diagram of system,with and without compensation by LPF
在4 kHz补偿带宽内,幅值已经基本满足要求,但相位角明显存在滞后,相移的存在意味着系统产生延时,严重影响有源滤波器的补偿效果,所以需要对相位进行校正。图9为系统与滞后环节1/z、1/z2、1 /z3、1/z4的比较效果,采用超前环节 z2对系统的相位进行校正。
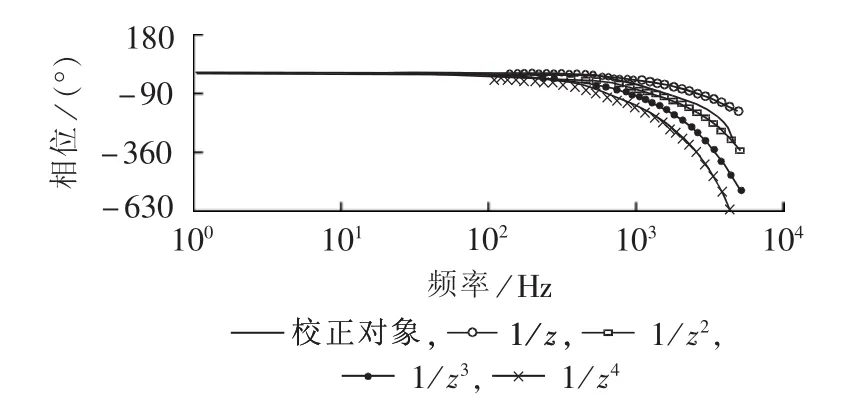
图9 被控系统和滞后环节的Bode图Fig.9 Bode diagram of controlled system and delay components
式(18)与超前环节z2相乘得:
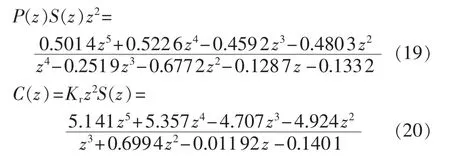
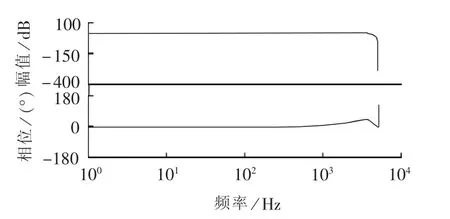
图10 被控系统的最终补偿效果Fig.10 Final compensation effect of controlled system
系统最终的补偿效果如图10所示。由图10可见,在0~1 kHz频段,幅值基本为0,相位也基本为0°,满足控制系统的要求,可以跟踪至少20次谐波。在大于1 kHz频段,相频特性有很小的相移,且远小于90°相移,在保证系统稳定性的前提下仍可以对指令信号进行高精度跟踪,因此系统至少可以稳定跟踪50 kHz的指令信号。
2.3.3 稳定性分析
根据式(8)验证系统稳定性。 当 Q(z)取0.95时,画出以(0.95,0)为圆心的单位圆和 C(z)P(z)的Nyquist图如图11 所示。 从图中可以看出,C(z)P(z)的轨迹在单位圆内,因此系统稳定。

图11 校正后被控系统的Nyquist图Fig.11 Nyquist diagram of controlled system after correction
至此,针对APF电流控制的重复控制器设计完成,各部分汇总如表1所示,依据此参数进行后续仿真。

表1 控制器参数Table 1 Parameters of controller
3 仿真结果及分析
为了验证提出的三相四开关并联型APF结构的正确性及重复控制的正确性,构建MATLAB/Simulink仿真电路。电源额定电压和频率分别为110 kV、50 Hz;采用V/v型牵引变压器,输出电感为1mH,等效电阻为0.5Ω;APF直流侧电压为67500V。根据以上设计参数进行系统仿真。
3.1 负载模型
机车负载模型在0 s投入300 A单相负载,0.4 s叠加投入100 A,根据实际高速铁路中电能质量情况设计详细参数如表2所示。
3.2 重复控制仿真
图12给出重复控制器的跟踪效果,波形由上至下分别为电流跟踪指令、控制器跟踪电流以及两者误差,可见两者误差较小,重复控制器可以稳定跟踪电流指令实现稳定跟踪。
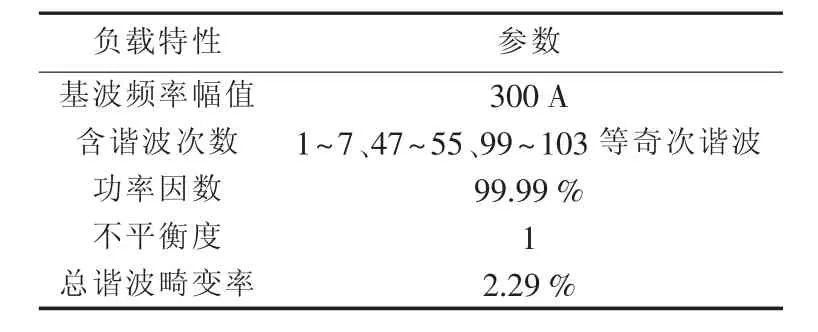
表2 负载参数Table 2 Parameters of load
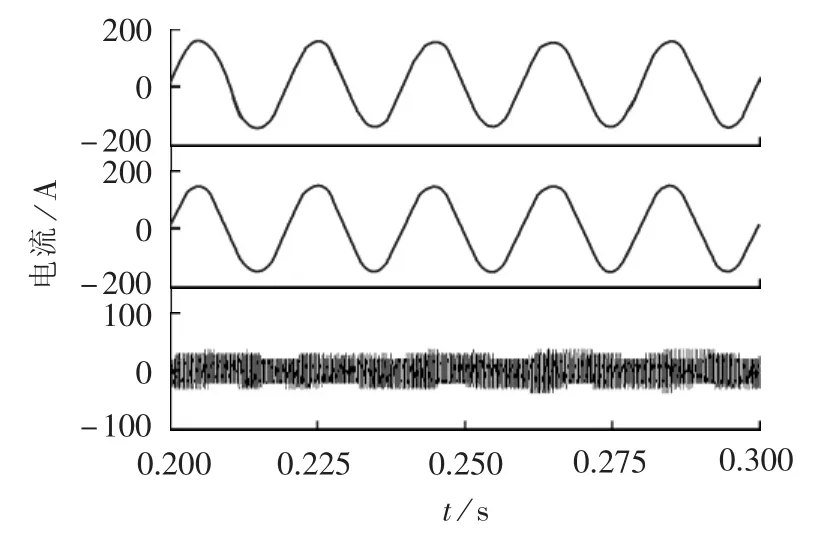
图12 采用重复控制器时的电流跟踪效果Fig.12 Current tracking effect of repetitive controller
图13为采用重复控制器时,负载由300 A增至400 A的动态响应,上下波形分别为负载电流与重复控制器跟踪电流,负载变化时,由于重复控制中加入了前向通道,系统能迅速调节补偿的谐波,动态响应快。
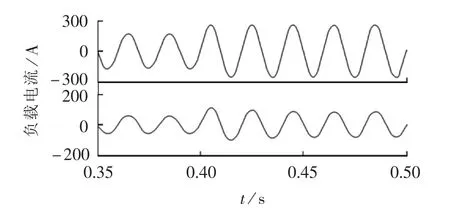
图13 采用重复控制器时的动态响应Fig.13 Dynamic response of repetitive controller
3.3 三相四开关并联型APF补偿性能

图14 负载基波电流、负载谐波电流、补偿后电网电流及补偿电流误差Fig.14 Load fundamental current,load harmonic current,compensated grid-side current and compensating current error
图14为三相四开关APF补偿性能,波形由上至下分别为负载基波电流、负载谐波电流、补偿后电网电流及补偿电流误差。可见补偿后的电网电流基本仅包含基波电流,误差大约为5 A。
图15为补偿后的谐波含量,总谐波畸变率减少到1.48%,而且50次、100次附近的谐波基本消除。
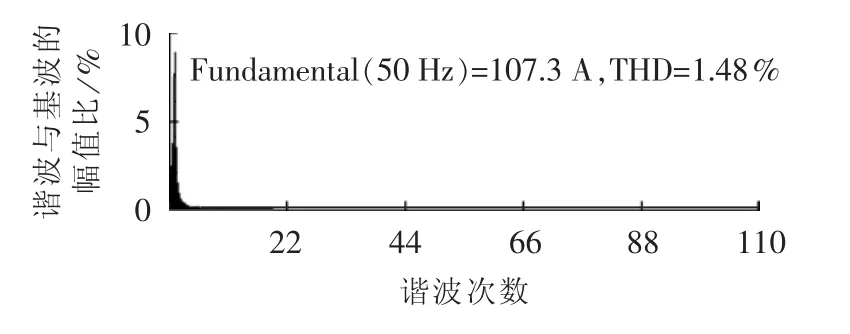
图15 补偿后的电网电流谐波含量Fig.15 Harmonic contents of compensated grid-side current
4 结论
本文将三相四开关型APF结构运用于电气化铁路中,并以高速铁路为例进行详细研究,将重复控制应用于三相四开关APF的输出电流跟踪控制,并以高速铁路中的高次谐波为对象给出了其重复控制器的设计和稳定性分析的方法。相对于传统的电流控制方法,本文采用的重复控制具有动态响应速度快、误差收敛时间短、高精度跟踪多种叠加高次谐波的优点。
仿真结果表明,重复控制器能够实现对至少103次谐波的高精度跟踪,从而提高APF的谐波补偿性能,电力机车向电网中注入的高次谐波几乎完全被三相四开关APF补偿,同时控制器的前向通道可以保证其动态性能。因此基于重复控制的三相四开关APF由于其较低的成本和较好的补偿性能使其在高速电气化铁路有源补偿中有较高的应用价值。
[1]杜习周,陈栋新,余晓鹏,等.电气化铁路负荷对电网电能质量的影响[J].华中电力,2011(6):35-37.DU Xizhou,CHEN Dongxin,YU Xiaopeng,et al.Impact of electrified railway load on power quality[J].Central China Electric Power,2011(6):35-37.
[2]周方圆,王卫安.高速铁路对供电质量的影响及治理措施[J].大功率变流技术,2010(6):41-45.ZHOU Fangyuan,WANG Weian.Influence of high-speed railway to power quality and its governance measures[J].High Power Converter Technology,2010(6):41-45.
[3]安群涛,孙醒涛,赵克,等.容错三相四开关逆变器控制策略[J].中国电机工程学报,2010,30(3):14-20.AN Quntao,SUN Xingtao,ZHAO Ke,et al.Control strategy for fault-tolerant three-phase four-switch inverters[J].Proceedings of the CSEE,2010,30(3):14-20.
[4]侯世英,宋星,孙韬,等.基于空间矢量滞环控制的新型容错三相四开关并网逆变器[J].电力系统保护与控制,2011,39(21):138-144.HOU Shiying,SONG Xing,SUN Tao,et al.A novel topology of fault-tolerant three-phase four-switch grid-connected inverter based on space vector hysteresis control[J].Power System Protection and Control,2011,39(21):138-144.
[5]黄传金,宋海军,陈铁军,等.三相四开关APF的SVPWM优化策略研究[J].电力电子技术,2012,46(8):44-45.HUANG Chuanjin,SONG Haijun,CHEN Tiejun,et al.Research on the SVPWM optimizational strategy of TFSAPF[J].Power Electronics,2012,46(8):44-45.
[6]于晶荣,粟梅,孙尧.有源电力滤波器的改进重复控制及其优化设计[J].电工技术学报,2012,27(2):235-242.YU Jingrong,SU Mei,SUN Yao.Improved repetitive control and its optimization for active power filter[J].Transactions of China Electrotechnical Society,2012,27(2):235-242.
[7]洪磊,陈晓,陈国柱.基于重复控制的并联型混合有源滤波器高性能控制策略[J].电力自动化设备,2012,32(10):94-98.HONG Lei,CHEN Xiao,CHEN Guozhu.High-performance control strategy based on repetitive control for SHAPF[J].Electric Power Automation Equipment,2012,32(10):94-98.
[8]吴敏,何勇,佘锦华.鲁棒控制理论[M].北京:高等教育出版社,2010.
[9]贾要勤,王晓滨,杨强.并联有源电力滤波器的自适应重复控制[J].电工技术学报,2011,26(10):118-122.JIA Yaoqin,WANG Xiaobin,YANG Qiang.Adaptive repetitive control of parallel active power filter[J].Transactions of China Electrotechnical Society,2011,26(10):118-122.
[10]宫金武,查晓明,陈佰锋.一种快速重复控制策略在APF中的实现和分析[J].电工技术学报,2011,26(10):110-117.GONG Jinwu,ZHA Xiaoming,CHEN Baifeng.Analysisand realization of a fast repetitive controller in active power filter system[J].Transactions of China Electrotechnical Society,2011,26(10):110-117.
[11]粟梅,王辉,孙尧,等.基于改进重复控制器的三相四线逆变器设计[J].中国电机工程学报,2010,30(24):29-35.SU Mei,WANG Hui,SUN Yao,et al.Design of three-phase fourleg inverter based on modified repetitive controller[J].Proceedings of the CSEE,2010,30(24):29-35.
[12]贾德利,尤波,张雪岩.逆变电源改进型重复控制器设计及仿真研究[J].电力自动化设备,2008,28(5):77-81.JIA Deli,YOU Bo,ZHANG Xueyan.Design and simulation of improved repetitive controller for inverted power supply [J].Electric Power Automation Equipment,2008,28(5):77-81.
[13]黄传金,许春香,巩鲁洪,等.三相四开关并联型有源电力滤波器关键参数计算及其实现[J].低压电器,2012(3):53-57.HUANG Chuanjin,XU Chunxiang,GONG Luhong,etal.Key parameters calculation and implementation of three-phase fourswitch shunt active power filter [J].Low Voltage Apparatus,2012(3):53-57.
猜你喜欢
高速铁路技术(2022年2期)2022-05-05
高速铁路技术(2022年1期)2022-03-17
建材发展导向(2021年24期)2021-02-12
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
环球时报(2020-08-11)2020-08-11
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
机电工程技术(2018年10期)2018-12-06
铁道通信信号(2016年2期)2016-06-01
