
带变遗忘因子的自适应子空间预测控制器设计
2016-05-11 02:13张壤文田学民中国石油大学华东信息与控制工程学院山东青岛266580
化工学报 2016年3期
张壤文,田学民(中国石油大学(华东)信息与控制工程学院,山东 青岛 266580)
带变遗忘因子的自适应子空间预测控制器设计
张壤文,田学民
(中国石油大学(华东)信息与控制工程学院,山东 青岛 266580)
摘要:针对实际工业过程具有非线性、时变和多变量的特点,提出一种数据驱动的带有变遗忘因子的自适应子空间预测控制方法。该方法将在线子空间辨识与模型预测控制相结合,同时利用期望输出值与实际输出值的误差实现变遗忘因子的自适应更新,并根据当前变遗忘因子构造了过去与将来的Hankel矩阵,从而实现了预测模型的在线更新,提高了控制器对非线性时变特征的辨识灵敏度和适应能力。最后,利用该控制器对四容水箱对象进行仿真研究,验证了算法的有效性。
关键词:非线性时变;数据驱动;在线子空间辨识;自适应;遗忘因子
2015-12-15收到初稿,2015-12-20收到修改稿。
联系人:田学民。第一作者:张壤文(1992—),女,硕士研究生。
引 言
在实际工业生产过程中常常会产生大量的实时数据,并且大部分工业过程具有时变性、不确定性和非线性的特点,较难建立精确的状态空间模型,即便是得到了被控对象的状态空间模型,在实际的生产应用过程中很多状态还是不可测的。子空间模型辨识[1-4]算法是一种能够直接由被控对象的输入输出数据辨识其状态空间模型而不用了解系统内部状态的方法,目前已经有相当多的研究成果将它与模型预测控制[5-7]相结合,从而实现了多变量预测控制器[8-13]的设计。所以,近年来采用子空间模型辨识的方法对被控对象的状态空间模型进行辨识逐渐成为一种趋势。
Kadali等[14]提出了一般子空间预测控制方法,利用数据驱动的方式设计了一种增量式子空间预测控制器;Luo等[15]提出了在线子空间辨识的自适应预测控制方法,利用滚动窗口在线更新R阵的方式得到下一时刻的预测模型;李少远等[16]设计了基于时变遗忘因子的子空间预测控制器,在已有在线辨识的基础上,利用遗忘因子来调整采集数据的权重。上述子空间预测控制器设计方法虽然运用了遗忘因子机制,却忽略了不同时刻遗忘因子作用于不同Hankel矩阵权重不同的问题。
针对上述问题,设计了一种数据驱动的带变遗忘因子的自适应子空间预测控制器。在每一采样时刻利用系统的输入输出数据更新Hankel矩阵,同时利用期望输出与实际输出的误差值构造变遗忘因子,实现预测模型的在线更新,从而使控制器具有较好跟踪性能的同时又能在模型失配下使得实际输出能够快速回到期望设定点。通过对四容水箱对象的仿真验证了算法的有效性。
1 基于子空间辨识的预测控制方法
1.1 在线子空间辨识方法
线性时不变系统的形式如下所示

式中,输入uk∈IRl,输出yk∈IRm,状态xk∈IRn,ek为零均值的高斯白噪声序列。

式中,下角标p和f分别代表了过去时刻和未来时刻。同样地,也可以定义包含测量噪声的Hankel矩阵Ep和Ef。这几个数据矩阵的列数j−2 N+ 2与行数N需满足关系:。
基于滚动模式的在线子空间辨识方法需要在每一采样时刻更新输入输出序列,剔除旧数据,加入新数据,从而实现对Hankel矩阵的在线更新。窗口数据集的在线更新示意图如图1所示。
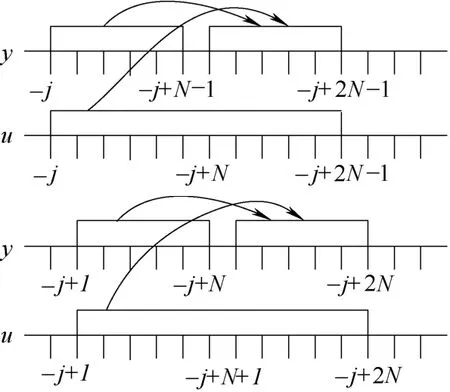
图1 滚动窗口子空间辨识Fig.1 Subspace identification with rolling window
利用上述Hankel矩阵,构造矩阵Wp如式(7)所示定义线性预测算子如式(8)所示


未来输出序列Yf的最小二乘预测值可以通过式(9)所示最小二乘问题求得

式(9)的解为将Yf的行空间正交投影到的行空间,如式(10)所示

通过QR分解可以对式(10)的正交投影问题进行数值求解
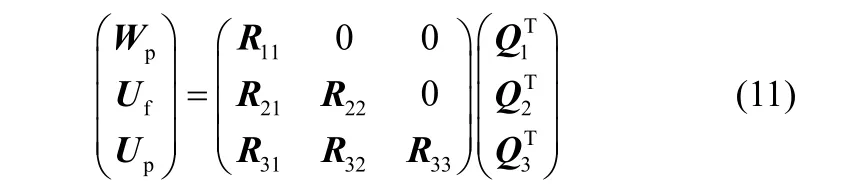
由式(11)构造L阵为

式中,†为矩阵的伪逆。Lw和Lu即为所求模型参数。在线子空间辨识需要在每一采样时刻通过更新输入输出向量构造当前时刻的Hankel矩阵以实现对模型参数的在线更新。
1.2 增量式预测控制方法
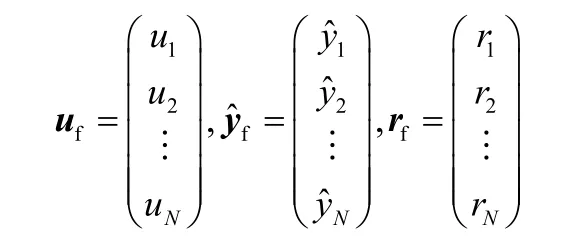
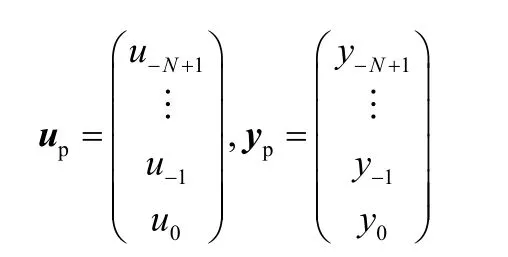
设未来的输入序列uf,相对应的未来输出预测序列以及未来的参考输出rf分别定义如下,定义过去的输入输出序列如下
为了构造
则子空间预测控制器的位置式目标函数可以写为


为了消除输出值与设定值之间的稳态误差,在控制器中加入积分特性[18],这就要求控制量应以增量的形式计算,此时,将式(13)修改如式(15)所示

式中
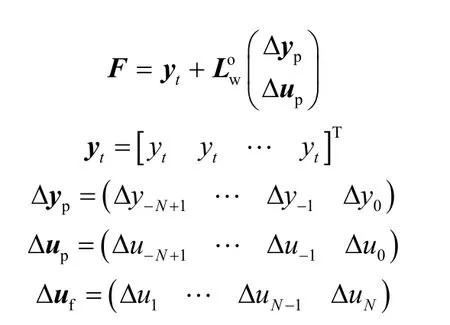
则目标函数中的模型参数表达式应如式(16)、式(17)所示
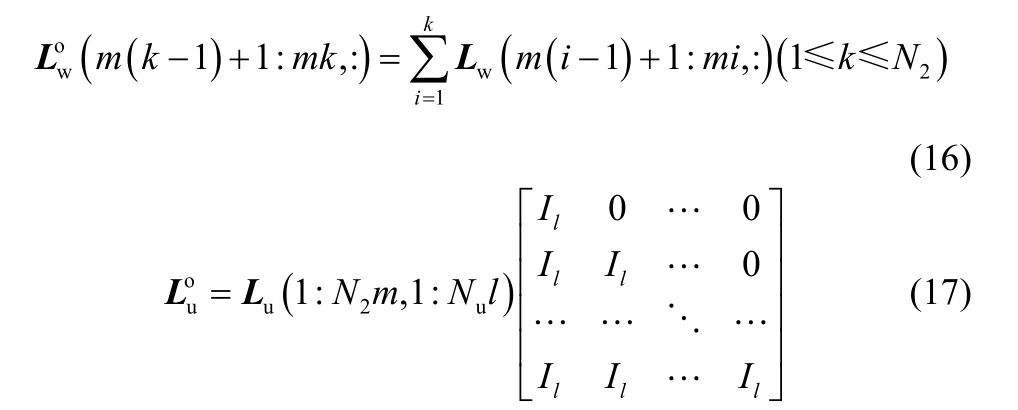
式中,N2为预测时域;Nu为控制时域;l为系统输入的维数;m为系统输出的维数。最终得到增量式最优控制量[14]为


2 带变遗忘因子的自适应预测控制方法
当前时刻的控制增量为
2.1 Hankel矩阵的在线更新形式
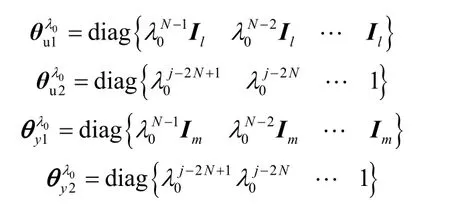
设计初始时刻的Hankel矩阵形式[19]如式(20)~式(23)所示
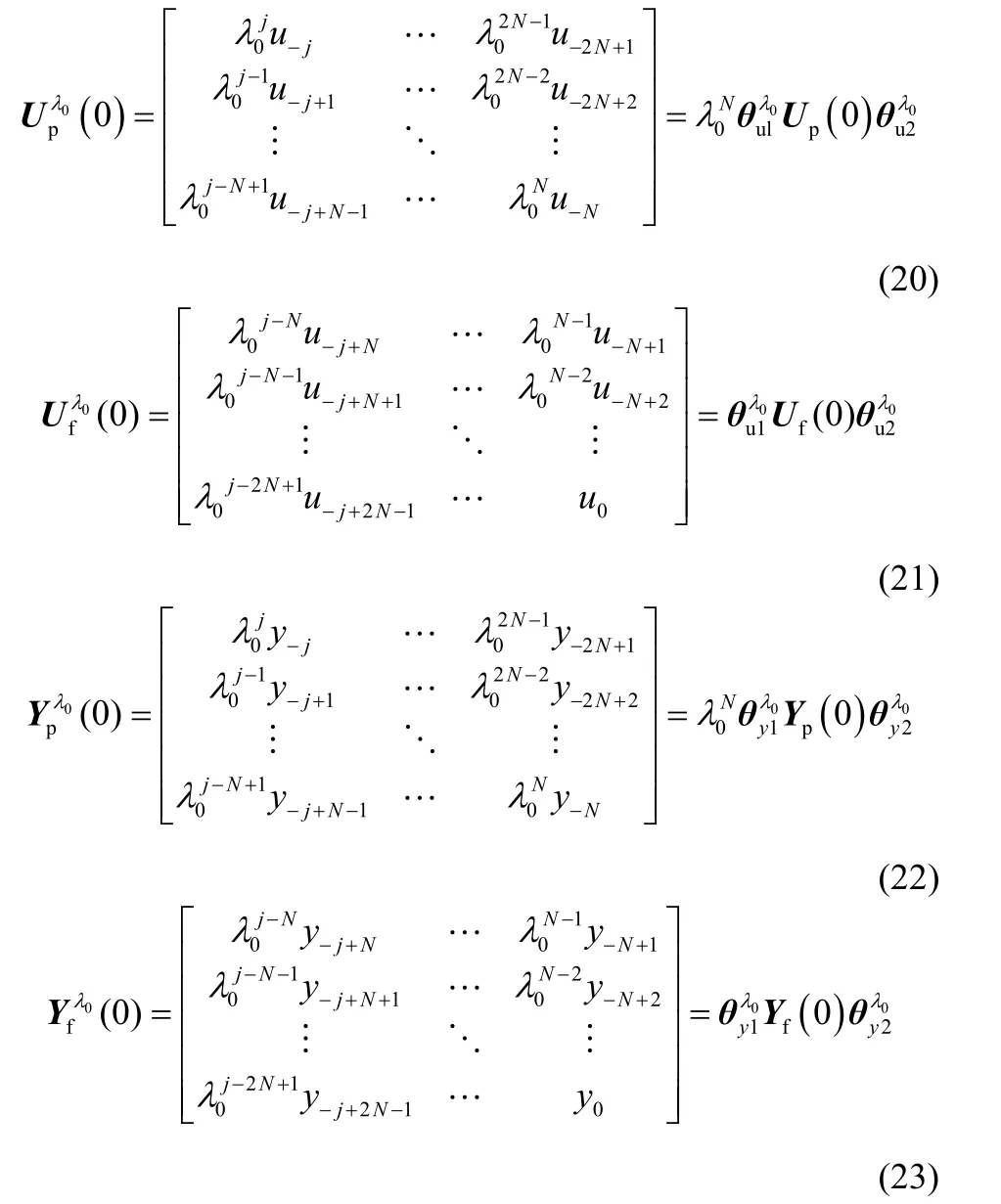
式中,Up(0),Uf(0),Yp(0),Yf(0)分别为初始时刻过去与未来的输入输出Hankel矩阵的一般形式,分别为带有遗忘因子的初始时刻过去与未来的输入输出Hankel矩阵。λ0∈ (0,1)为初始时刻的遗忘因子,且定义
由上述表达式可以看出,变遗忘因子作用于过去与未来的Hankel矩阵权重不同,过去的Hankel矩阵受遗忘因子影响的权重要比将来的Hankel矩阵受遗忘因子影响的权重大。
为了实现在线子空间辨识,在每一采样时刻,需利用滚动优化的方法对Hankel矩阵进行在线更新,并同时利用期望输出与实际输出的误差值实现变遗忘因子的自适应更新。根据初始时刻Hankel矩阵的构造形式,可得i时刻Hankel矩阵[19]的构造形式如式(24)~式(27)所示

基于上述Hankel矩阵的构造形式,可得i时刻带有变遗忘因子的输入输出Hankel矩阵形式如式(28)~式(29)所示
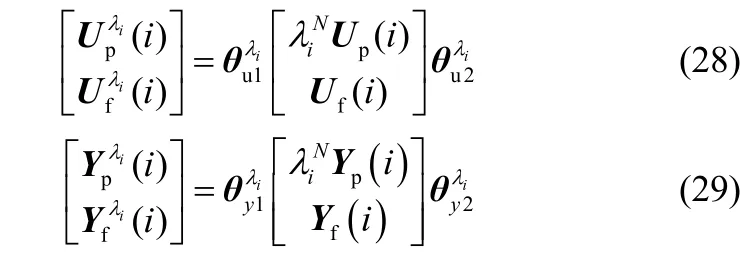
最终,得到了带有变遗忘因子的Hankel矩阵的在线更新形式。
2.2 变遗忘因子的更新
为了提高对被控对象的控制精度,增加算法的自适应性,可通过挖掘系统的内部信息实现遗忘因子的在线更新,使其随着参数变化的快慢自动调整大小。一般,对于参数变化较快的系统可选择较小的遗忘因子,加快算法跟踪速度,对于参数变化较慢的系统可选择较大的遗忘因子,提高控制精度和抗噪能力。利用每一采样时刻期望输出与实际输出的误差值构造遗忘因子的形式如式(30)、式(31)所示
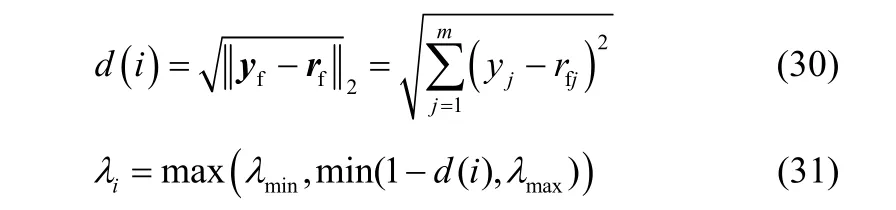
λi即为i时刻的遗忘因子,λmax和λmin分别为遗忘因子的上下限。通过设置遗忘因子在一个固定范围内变化,可以防止Hankel矩阵出现病态奇异的情况。由式(30)、式(31)可知,当系统参数变化快,每一采样时刻的误差值d(i)增大时,遗忘因子减小,远离当前时刻采集数据的权重衰减速度增加,相当于记忆长度减小,提高了辨识灵敏度,反之,当d(i)减小时,遗忘因子增加,使得辨识精度提高。
2.3 自适应子空间预测控制算法实现步骤
综上所述,带变遗忘因子的自适应子空间预测控制器设计步骤如下。
(1)对被控对象进行机理建模,根据输入输出数据构造带有变遗忘因子的Hankel矩阵,得到初始时刻的模型参数;
(3)根据模型参数和所构造向量求解最优化目标函数得到控制量ut并将其加到被控对象上得到实际输出;
(4)利用期望输出与实际输出的误差值更新遗忘因子,同时采集新增输入输出数据对更新Hankel矩阵,得到当前时刻的模型参数,转至步骤(2)。
3 仿真验证
四容水箱装置[20]如图2所示。
由图2可以看出,该装置由两个水泵、两个分配阀和四个互连的储水罐组成,u1、u2分别为加在两个水泵上的电压,v1、v2分别为两个分配阀的流量分配系数,且v1、v2均在区间[0,1]内变化,h1、h2、h3和h4分别为4个水箱的液位高度。系统的输入即控制变量为u1和u2;系统的输出即被控变量为两个下水箱的液位h1和h2。当水泵的输入u1变化时,不仅会使得下水箱液位h1变化,还会通过分配阀使得上水箱h4变化从而影响下水箱液位h2,所以两个下水箱液位h1和h2呈相互耦合的关系。
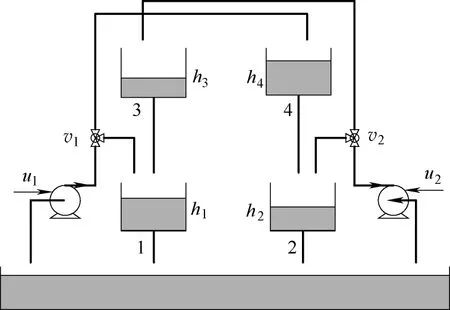
图2 四容水箱装置Fig.2 Quadruple tank device
该系统的动态平衡方程[20]为

式中,A1、A2、A3和A4分别为4个水箱的横截面积;a1、a2、a3和a4分别为4个水箱流出管道的横截面积。具体模型参数参见文献[21]。
利用带遗忘因子的自适应子空间预测控制方法对四容水箱对象进行控制仿真曲线如图3所示。

图3 自适应预测控制仿真曲线Fig.3 Adaptive predictive control simulation
由图3可以看出,当t= 100 s,250 s,450 s时下水箱液位h1的设定值发生正阶跃变化,当t= 600 s,800 s时下水箱液位h2的设定值发生负阶跃变化,无论是正阶跃还是负阶跃,预测控制器都能够使输出较快跟踪给定值的变化而变化,且由于耦合作用引起的波动较小。由此可知,带遗忘因子的自适应子空间预测控制器具有良好的跟踪性能。
将带变遗忘因子的自适应子空间预测控制仿真曲线与一般子空间预测控制仿真曲线对比如图4所示。
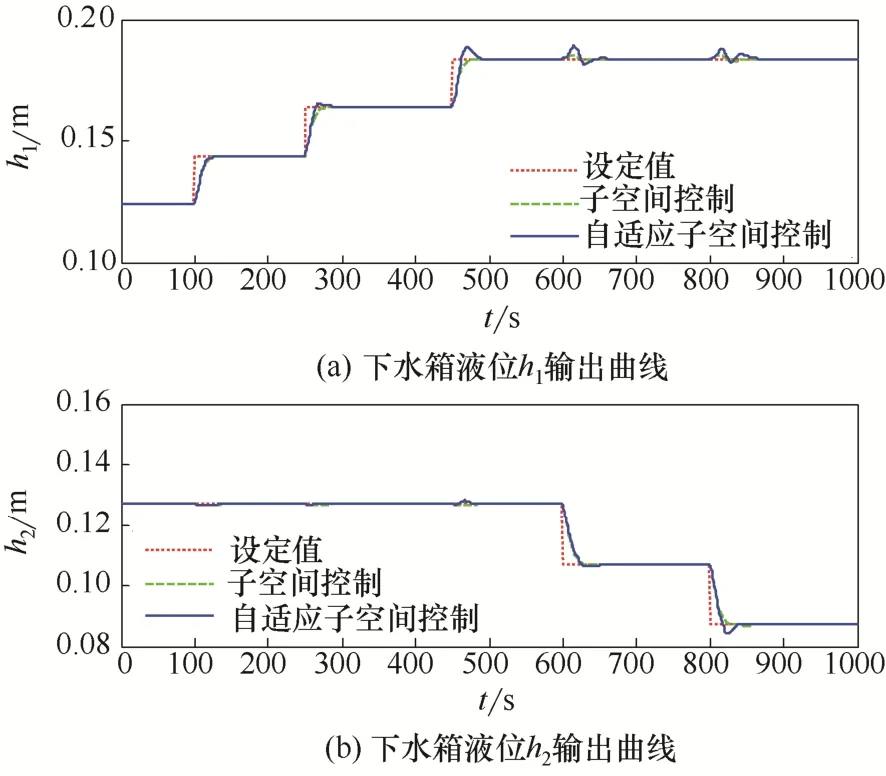
图4 自适应与子空间预测仿真比较Fig.4 Tracking comparison between adaptive and non-adaptive
由图4可以看出,两种预测控制器在工作点发生改变的情况下都能够较快跟踪设定值的变化而变化,体现了基于子空间辨识的预测控制器具有较好的跟踪性能和控制精度。
为了突出自适应子空间预测控制器的优势,将其与带约束的子空间预测控制器在模型失配的情况下进行比较,令四容水箱对象的流量阀分配系数v1增大,从而使得流入下水箱1的流量增大,流入下水箱4的流量减小,从而影响下水箱2的流量,因此模型发生改变,控制效果见图5、图6。
图5与图6分别为在t =300 s,500 s,800 s时逐渐增加流量阀分配系数v1所得到的液位输出与输入量控制曲线。由图5可以看出,在模型失配情况下,一般子空间预测控制器由于对模型参数是离线辨识的,无法适应改变的过程条件,导致输出曲线发散,由于对其进行限幅使得其输出曲线呈等幅振荡状态。而自适应子空间预测控制器能够在每个采样时刻更新模型参数,使得控制器适用于不断变化的过程条件,即便发生模型失配,实际输出也能够快速地回到期望设定点,体现了自适应子空间预测控制器的优势。
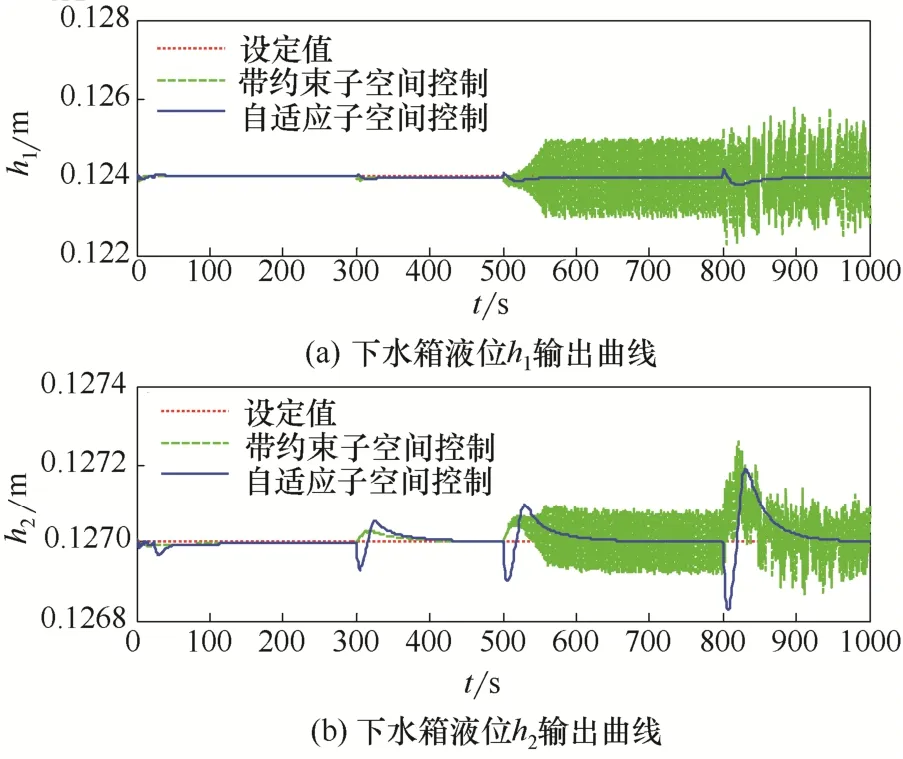
图5 自适应与无自适应输出仿真比较Fig.5 Output comparison between adaptive and non-adaptive
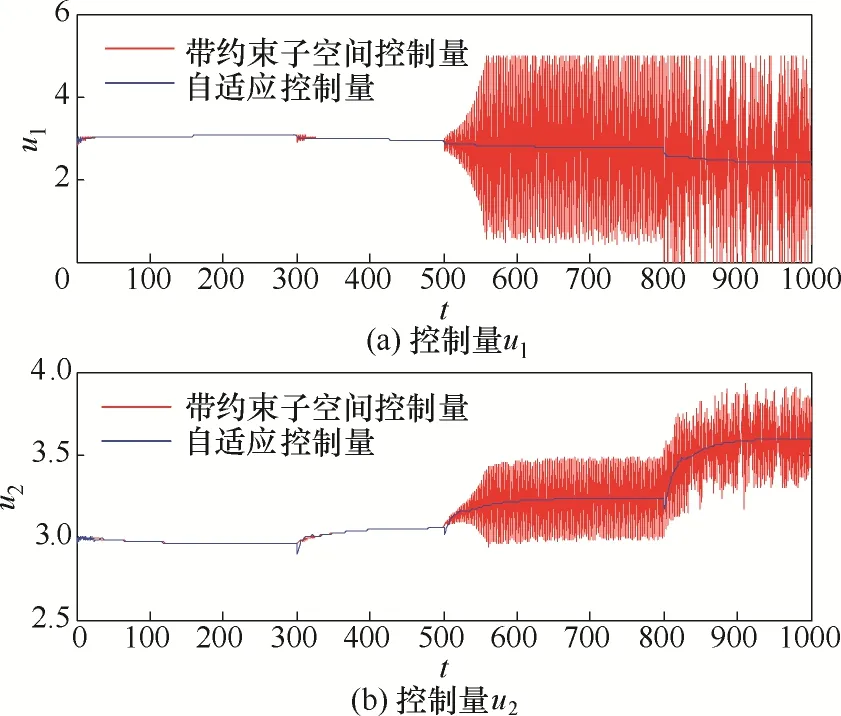
图6 自适应与无自适应输入仿真比较Fig.6 Input comparison between adaptive and non-adaptive
由于自适应子空间预测控制算法需要在每一采样时刻更新变遗忘因子与模型参数,计算量大,耗时长,而四容水箱系统参数变化较慢,故选取固定步长为10,将算法改变为每隔10个采样时刻更新一次遗忘因子与模型参数,遗忘因子则由这10个采样时刻的误差均值所构造,所得模型失配下的控制仿真曲线见图7。由图7可以看出,修改后的自适应子空间预测控制器在模型失配的情况下也能够较快回到期望设定点,并且计算时长缩短为原来的1/10。
4 结 论
设计了一种带变遗忘因子的自适应子空间预测控制器,通过将其与带约束的子空间预测控制器在模型失配的情况下进行仿真比较,突出了带变遗忘因子的自适应子空间预测控制算法的优势,最后通过延长更新模型参数的时间间隔,既得到了较理想的控制效果,又减小了计算耗时。仿真实例验证了算法的有效性。
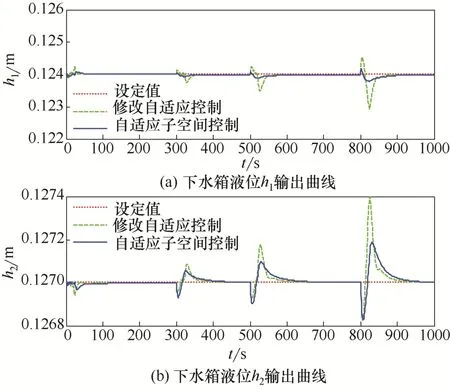
图7 自适应与修改自适应仿真比较Fig.7 Comparison between adaptive and modified adaptive
References
[1] 李幼风, 苏宏业, 褚健. 子空间模型辨识方法综述 [J]. 化工学报, 2006, 57 (3): 473-479. LI Y F, SU H Y, CHU J. Overview on subspace model identification method [J]. CIESC Journal, 2006, 57 (3): 473-479.
[2] QIN S J. An overview of subspace identification [J]. Computers & Chemical Engineering, 2006, 30 (10): 1502-1513.
[3] MICCHI A, PANNOCCHIA G. Comparison of input signals in subspace identification of multivariable ill-conditioned systems [J]. Journal of Process Control, 2008, 18 (6): 582-593.
[4] HOUTZAGER I, VAN WINGERDEN J W, VERHAEGEN M. Fast-array recursive closed-loop subspace model identification [J]. System Identification, 2009, 15 (1): 96-101.
[5] 席裕庚. 预测控制 [M]. 北京: 国防工业出版社, 1993.
XI Y G. Predictive Control [M]. Beijing: National Defence Industry Press, 1993.
[6] FORBES M G, PATWARDHAN R S, HAMADAH H, et al. Model predictive control in industry: challenges and opportunities [J]. IFAC-PapersOnLine, 2015, 48 (8): 531-538.
[7] RIBEIRO C H P, MIYOSHI S C, SECCHI A R, et al. Model predictive control with quality requirements on petroleum production platforms [J]. Journal of Petroleum Science and Engineering, 2016, 137: 10-21.
[8] WAHAB N A, KATEBI R, BALDERUD J, et al. Data-driven adaptive model-based predictive control with application in wastewater systems [J]. Control Theory & Applications, IET, 2011, 5 (6): 803-812.
[9] NAVALKAR S T, VAN WINGERDEN J W, VAN SOLINGEN E, et al. Subspace predictive repetitive control to mitigate periodic loadson large scale wind turbines [J]. Mechatronics, 2014, 24 (8): 916-925.
[10] WU X, SHEN J, LI Y, et al. Data-driven modeling and predictive control for boiler-turbine unit [J]. Energy Conversion, IEEE Transactions on, 2013, 28 (3): 470-481.
[11] LUO X, SONG Y. Adaptive predictive control: a data-driven closed-loop subspace identification approach [C]//Abstract and Applied Analysis. Hindawi Publishing Corporation, 2014.
[12] MARDI N A, WANG L. Subspace-based model predictive control of time-varying systems [C]//Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on. IEEE, 2009: 4005-4010.
[13] PAN H, GAO H. A combinatory study on MPC with subspace identification, steady-state target calculation and dynamic quadratic control [C]//Intelligent Control and Automation (WCICA), 2014 11th World Congress on. IEEE, 2014: 3164-3169.
[14] KADALI R, HUANG B, ROSSITER A. A data driven subspace approach to predictive controller design [J]. Control Engineering Practice, 2003, 11 (3): 261-278.
[15] LUO X, JIANG M, CHEN X. Online subspace-based constrained adaptive predictive control with state-space model [J]. Journal of Convergence Information Technology, 2013, 8 (2).
[16] 李少远, 吴永玲. 时变遗忘因子的子空间辨识及预测控制器设计[J]. 同济大学学报 (自然科学版), 2010, 38 (11): 1651-1655.
LI S Y, WU Y L. Predictive controller design based on subspace identification with varying forgetting factor [J]. Journal of Tongji University (Natural Science), 2010, 38 (11): 1651-1655.
[17] FAVOREEL W, DE MOOR B. SPC: subspace predictive control [C]//Proceedings of the IFAC World Congress. Beijing, China, 1998.
[18] ZHANG L, XU S Z, ZHAO H T. Adaptive subspace predictive control with time-varying forgetting factor [J]. International Journal of Automation and Computing, 2014, 11 (2): 205-209.
[19] 韩勇, 张合新, 黄金峰. 无记忆自适应子空间预测控制器设计 [J].弹箭与制导学报, 2013, 33 (2): 143-148.
HAN Y, ZHANG H X, HUANG J F. Memoryless self-adaptive subspace predictive controller [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2013, 33 (2): 143-148.
[20] 王树青. 工业过程控制工程 [M]. 北京: 化学工业出版社, 2002. WANG S Q. Industrial Process Control Engineering [M]. Beijing: Chemical Industry Press, 2002.
[21] KUMAR E G, MITHUNCHAKRAVARTHI B, DHIVYA N. Enhancement of PID controller performance for a quadruple tank process with minimum and non-minimum phase behaviors [J]. Procedia Technology, 2014, 14: 480-489.
研究论文
Received date: 2015-12-15.
Foundation item: supported by the National Natural Science Foundation of China (61273160).
Design of adaptive subspace predictive controller with variable forgetting factor
ZHANG Rangwen, TIAN Xuemin
(College of Information and Control Engineering, China University of Petroleum (East China), Qingdao 266580, Shandong, China)
Abstract:In order to overcome the nonlinear, time-varying and multivariate of actual industrial processes, a kind of data-driven adaptive subspace predictive control method with forgetting factor was proposed . This method combined model predictive control with online subspace identification, the adaptive updating of variable forgetting factor was designed on the distance value of desired output and actual output at the same time, then the past and future forms of Hankel matrices were designed with the current forgetting factor, thus the online updated of predictive model was realized and the identification sensitivity and adaptability of controller for nonlinear and time-varying characteristics was improved. Finally, a simulating example with the quadruple tank was given to verify the validity of this method.
Key words:nonlinear and time-varying; data-driven; online subspace identification; adaptive; forgetting factor
DOI:10.11949/j.issn.0438-1157.20151904
中图分类号:TP 273
文献标志码:A
文章编号:0438—1157(2016)03—0858—07
基金项目:国家自然科学基金项目(61273160)。
Corresponding author:Prof. TIAN Xuemin, tianxm@upc.edu.cn
猜你喜欢
价值工程(2016年35期)2017-01-23
软件(2016年4期)2017-01-20
中国教育信息化·基础教育(2016年11期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
软件导刊(2016年11期)2016-12-22
青春岁月(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
