潜油螺杆泵直驱细长永磁电机转轴扭曲对电磁转矩影响分析
2016-05-07 03:27:19张炳义刘忠奇冯桂宏沈阳工业大学电气工程学院辽宁沈阳110870
电机与控制学报 2016年2期
张炳义,刘忠奇,冯桂宏(沈阳工业大学电气工程学院,辽宁沈阳110870)
潜油螺杆泵直驱细长永磁电机转轴扭曲对电磁转矩影响分析
张炳义,刘忠奇,冯桂宏
(沈阳工业大学电气工程学院,辽宁沈阳110870)
摘要:针对潜油电机在负载运行时,其细长的电机转轴发生许用扭转变形导致输出转矩下降、电流上升等问题,推导许用扭转角与电磁转矩削弱系数的解析表达式,建立细长转轴扭转角与电磁转矩下降的定量关系曲线,为潜油螺杆泵机组故障原因提供了理论依据。研制单元组合式永磁直驱潜油电机,对其细长转轴进行3D有限元扭转变形应力分析。基于转轴扭转变形结果建立电机2D 和3D斜极等效有限元模型,进行机械应力场和电磁场耦合计算,得出电机电磁转矩的下降情况。研制样机进行单元电机组合运行试验,验证了转矩削弱系数表达式的正确性。
关键词:细长永磁电机;转轴扭曲变形;电磁转矩削弱;解析计算;3D有限元仿真;组合试验
刘忠奇(1987—),男,博士研究生,研究方向为特种电机及其控制;
冯桂宏(1963—),女,教授,研究方向为电气工程及其自动化。
0 引言
潜油螺杆泵与地面螺杆泵相比,取消了细长的抽油杆,将潜油电机直接安装在地下油井中为螺杆泵提供动力,可以广泛用于斜井和水平井采油。现有的潜油电机有两极三相鼠笼式异步电动机加减速器和永磁同步电动机直驱两种结构[1]。然而,油井套管有限的径向尺寸严格限制了潜油电机的机壳外径,为了保证一定的功率等级输出,潜油电机机壳外径在0.1~0.15米左右,而电机长度在5~10米,甚至更长[2]。随着螺杆泵负载的变化,在许用扭转角度范围内,细长潜油电机转轴发生扭转变形,电机转矩输出能力有不同程度的下降现象,导致电流上升,降低电机寿命。这样就导致设计人员在潜油电机选型时,进一步的提高潜油电机的功率等级,利用“大马拉小车”的策略来保证潜油泵系统的安全运行。
文献[3]总结了潜油电泵机组常见故障原因,其中,潜油电机主要以电机烧毁为主,集中研究了在高温、高压、强腐蚀性的复杂工况以及结构部件磨损因素对其故障的影响。文献[4]建立了潜油电机转子的振动模型,得出降低潜油电机寿命的临界转速共振区。文献[5]提出单边磁拉力对潜油电机转轴挠度影响较大,并通过有限元应力场分析法对电机转轴在单边磁拉力作用下的变形进行了分析。文献[6]对116系列潜油电机花键轴进行了应力校核,得到了潜油电机转轴非线性有限元模型及其应力场分布情况。文献[7]从潜油电机的细长结构入手,对其定、转子分段尺寸和气隙润滑油冷却油道进行优化设计,提高潜油电机的输出性能。
综上所述,目前对潜油电机的研究,主要是集中在机械应力的分析,或是基本电磁性能的分析。而对于这种超细长结构电机,应力变形对电磁性能的影响,亦不容忽视。因此,本文从潜油电机自身的细长结构出发,对永磁电动机直驱式转轴扭转变形与电磁性能下降的关联性进行分析,理论推导转轴许用扭转变形量与电机输出电磁转矩的关系,得出转矩削弱系数的解析表达式;建立潜油电机转轴3D有限元模型进行扭转变形应力分析,基于转轴扭转变形结果建立电机2D和3D等效有限元模型,通过机械应力场和电磁场的耦合计算,进行解析表达式与有限元仿真结果对比分析。并利用样机试验验证解析表达式的准确性。
1 转轴扭曲变形对电磁性能影响解析计算
1.1超细长永磁电机解析模型建立
电磁转矩是电机输出性能的重要指标之一,对于潜油电机,稳定的转矩输出是潜油电泵机组安全运行的可靠保障。
图1是潜油永磁电机的等效物理模型。忽略铁心磁路磁阻,气隙磁场储能可表示为

式中:Ls,Lr分别为定转子自感;is为定子电流;Ψr为转子永磁磁链;θ为转子d轴轴线滞后于定子三相绕组合成磁场s轴线的电角度,简称转子位置角。经定转子绕组匝数归算,使Ls=Lr=Lm,其中Lm为定转子互感的最大值。
电磁转矩为

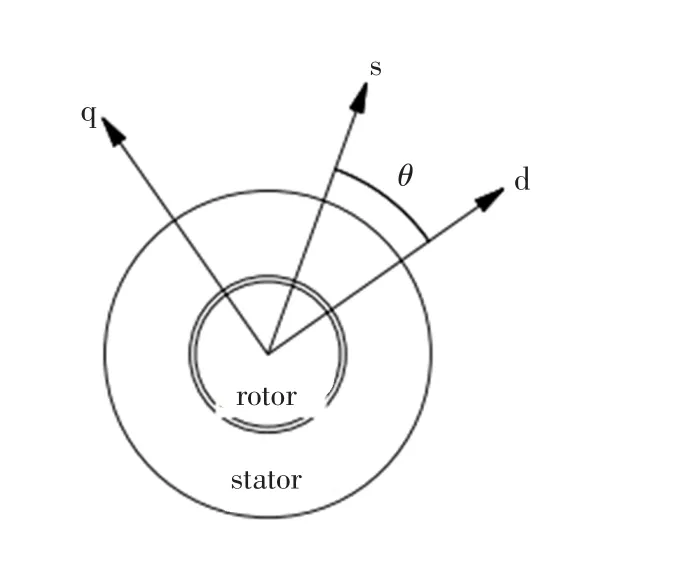
图1 等效物理模型Fig.1 Equivalent physicalmodel
在运行过程中,电磁转矩Te大于负载转矩TL,才能保证潜油电机稳定输出转矩。在负载波动时,随着TL增加,θ随之变大;TL减小,θ也变小;其中,当转子d轴轴线与定子合成磁场s轴轴线正交时实现最大转矩输出[8-9]。
电机负载运行时,转轴在其材料许用扭转角度范围内都会发生一定的相对扭转角偏移。对于常规电机,常常被设计人员忽略。但对于超细长比的潜油电机转轴重载工况,必须加以深入分析。假定潜油电机转子与转轴完全刚性连接,转轴变形量可以自由传递给转子部件。如图2所示,在转轴B端负载转矩TL的作用下,转轴发生扭转角δLef偏移,转子q轴偏移到q'轴,有等效转子斜极削弱转矩脉动作用[10-12],本文着重对其引起的输出转矩下降情况进行分析。在沿电机轴向AB方向,距离A点x处的电磁转矩线密度ρ可表示为

式中:TeN为理论计算电磁转矩;Lef为电机铁心有效轴向长度;α=pδx,p为电机极对数,δ为转轴变形单位长度上的扭转角。
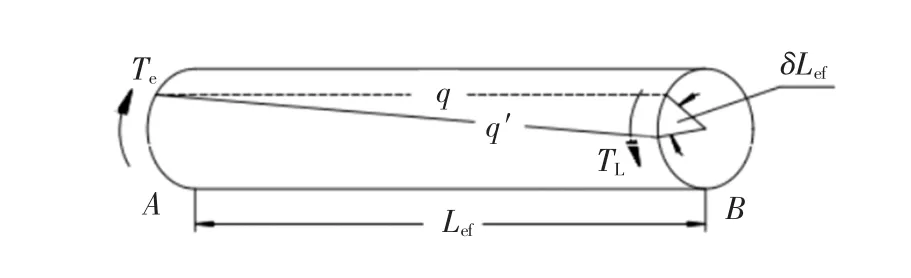
图2 考虑扭转变形的转子模型Fig.2 Rotor m odel w ith torsion deformation
考虑扭转变形的电磁转矩变为

将式(3)代入式(4),得

定义k为电磁转矩削弱系数为

当θ=π/2时,

即为电机最大转矩削弱系数[13]。
单位长度上的许用扭转角[δ]视转轴的工作条件而定[14],用于精密机械的轴[δ]=0.25-0.5°/m,一般传动轴[δ]=0.5~1°/m,刚度要求不高的轴[δ]=2°/m。下面针对不同工作条件具体分析电机转轴刚性变形对电磁转矩削弱系数kmax的影响。在低速大转矩PMSM系统中,电机极对数p较大,对电磁转矩削弱更为明显。如图3所示。随着电机轴向长度和电机极对数的增加,电磁转矩削弱系数kmax有明显的下降趋势。对于常规PMSM,在图3(a)中,通常Lef≤1 m,当p=10时,kmax≥0.999 2,在电机工程设计中往往忽略不计。对于细长型PMSM,在图3(b)中,当P=5,Lef=8 m时,kmax=0.921 2;在图3(c)中,当P=5,Lef=4 m时,kmax=0.921 2;对电机转矩输出有明显的削弱影响。为了保证一定的转矩输出,根据式(2)就得加大潜油电机定子电流is,导致电机温度进一步上升,降低电机寿命。
1.2单元组合式永磁电机模型分析
下面对单元组合式永磁电动机直驱式系统的最大转矩削弱系数进行解析分析。将传统的潜油电机分成若干单元电机并联运行,各电机像电池一样头尾连接,功效上等同于一台细长永磁电机。具体的单元电机联接结构模型如图4所示。

图3 转轴许用扭转角与电磁转矩削弱系数关系曲线Fig.3 Relation curves of allowable torsion angle and electromagnetic torque weakened coefficient
在图4(a)定子3D模型中,导磁段由硅钢片叠压,非导磁段由铜片叠压成型。在图4(b)转子3D模型中,各节转子套装在一根细长转轴上。单元组合式永磁同步电动机将潜油电机分成n个常规细长比的单元电机并联运行,各单元电机能够独立运行并通过花键轴组装连接,总输出转矩等于各单元电机输出转矩之和。对应到图4(c)解析计算模型中,n节转子串接,Lef为每节转子的有效铁心长度,b为相邻转子之间的连接长度,坐标Xn侧为负载端。

第i节转子的最大转矩削弱系数为

式中,δi为第i节转轴单位长度上的相对扭转角,整个系统的最大转矩削弱系数为


图4 单元组合潜油电机联接结构模型Fig.4 Submersiblemotor concatenated structuremodel
2 转矩削弱系数有限元分析
2.1单元组合式永磁电机转轴扭曲变形分析
细长电机轴是潜油电机的重要部件之一,目前潜油电机普遍采用的是高强度35CrMo合金结构钢材质转轴,其抗拉强度σb≥985 MPa,屈服强度σs≥835 MPa。单元电机的主要性能参数如表1所示,潜油螺杆泵系统根据需要的转矩选择串接的单元电机台数。

表1 主要性能参数Table 1 Main performance parameters
按照GB/T16750-2008潜油电泵机组国家标准“潜油电机98mm系列最大转矩倍数为2.0(容差-10%)”,分别对样机额定负载和最大转矩输出情况下的转轴扭转变形进行考核[15]。基本流程为:建模——网格剖分——加载——求解——后处理。建立转轴3D有限元静力模型,逐渐增加串接台数(串接总长度小于10 m),轴与轴之间的花键连接设定为线性接触配合,选取四面体单元网格划分,在转轴与转子配合表面施加电磁转矩,在负载轴伸端面施加总输出转矩,仿真得到有限元分析结果如图5、图6所示。
图5(a)是8台单元电机转轴串接施加额定负载时得到的应力放大效果云图,转轴总长4.12 m,应力集中发生负载侧轴伸端面上,最大值为97.364 MPa,在转轴材料许用范围之内。根据应力变形分析数据进行计算,只考虑转轴与转子配合面的变形量,得到相对扭转角变形云图,如图5(b)所示,最大扭转角变形发生在最接近负载侧转轴,最大值为0.726°,并向右侧平滑递减。

图5 额定负载时转轴应力扭转变形云图Fig.5 Distribution nephogram of stress and torsion deformation w ith shaft by rated load

图6 最大转矩输出时转轴应力扭转变形云图Fig.6 Distribution nephogram of stress and torsion deformation w ith shaft by maximum torque
图6是8台单元电机转轴串接施加最大转矩输出时转轴应力扭转变形分析结果。应力集中最大值为194.73 MPa,扭转角变形最大值为1.45°。保证负载侧轴伸端集中应力最大值在其材料许用应力范围内的情况下,逐步增加单元电机转轴串接台数,得到转轴应力变形的具体数据如表2所示。将数据代入到式(9)~式(10)得到单元组合式潜油电机在额定负载和最大转矩输出时电磁转矩削弱系数K与电机轴向长度的关系曲线如图7所示。当电机轴向长度大于5 m时,额定负载和最大转矩都有明显的削弱现象。其中20台单元电机串接时,转轴总长10.3 m,额定转矩下降了1.7%,最大转矩倍数下降了6.6%;最大转矩输出时相当于有1.32台单元电机没有出力。根据潜油电机的现有技术:长度10 m的潜油电机可以实现3台串接,再加上转子装配公差和转轴串接间隙影响,随着串接的潜油电机长度的增加,其额定转矩和最大转矩将会有更大程度的削弱。在潜油螺杆泵负载不变和堵转时,只有增大潜油电机的额定电流和过载电流来保证螺杆泵平稳运行,长期工作制下,潜油电机定子绕组温升偏高,加速绕组绝缘老化,大大降低了潜油电机寿命。
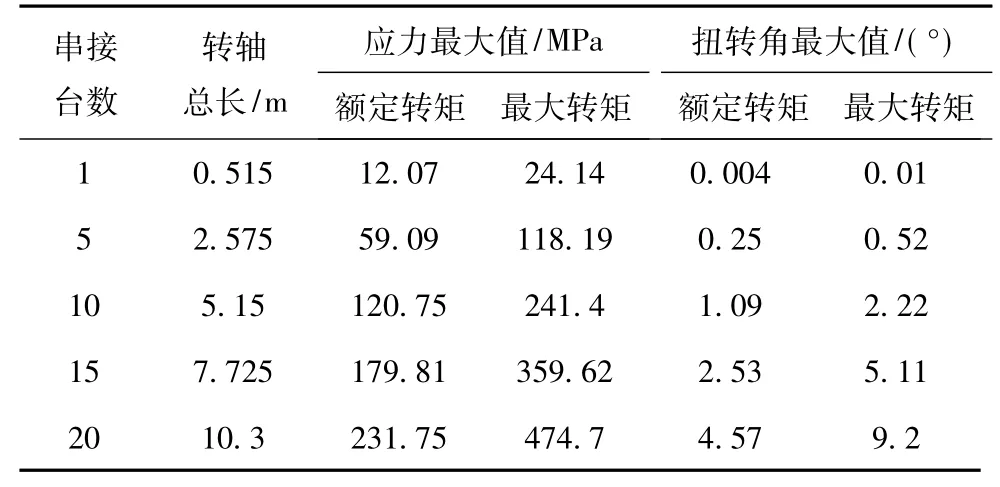
表2 转轴应力变形数据Table 2 Parameters of torsion deformation and stress

图7 电磁转矩削弱系数与电机轴向长度关系曲线Fig.7 Relation curves of motor axial length and electromagnetic torque weakened coefficient K
2.2电磁转矩削弱有限元验证
建立样机二维有限元静态模型如图8所示,保证转子q轴轴线与定子合成磁场s轴轴线重合,定子三相绕组分别添加额定电流(对应额定转矩工况)和最大电流(对应最大转矩工况)激励源,改变q轴轴线偏离s轴轴线的夹角,选取步长机械角度0.2°参数化计算其对应的电磁转矩线密度,得到具体关系曲线如图9所示。图中解析表达式计算曲线与有限元仿真曲线基本一致。

图8 样机二维有限元模型Fig.8 2D finite element prototypemodel

图9 电磁转矩对比关系曲线Fig.9 Contract curves of electromagnetic torque
根据表2中转轴串接应力场变形数据,考虑转子扭转斜极因素,建立样机三维有限元电磁场静态模型[16-17],分别计算负载轴伸端的第20台单元电机在额定电流和最大电流下输出的电磁转矩,如表3所示,额定电流状态下电磁转矩削弱系数为0.96,最大电流状态下电磁转矩削弱系数为0.899,与图7的解析计算曲线对比,误差分别为2.34%和3.61%。
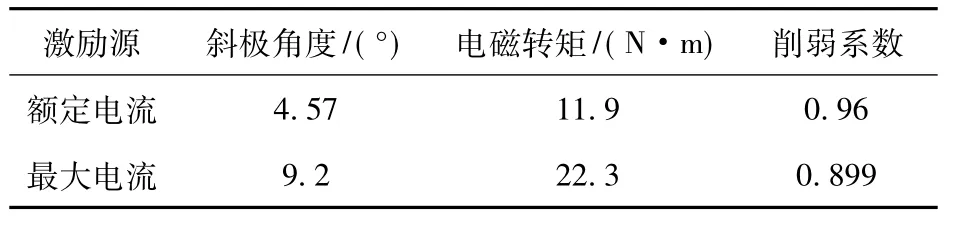
表3 三维有限元计算结果Table 3 3D finite element calculation result
3 样机试验研究
3.1转轴扭转模拟试验
单元组合式永磁电机转轴扭转模拟试验台如图10所示,采用一台变频器并联供电两台电机运行。由于转轴扭转变形量的直接测量十分困难,故通过改变两台样机定子轴线相对位置(电气原理上等同于改变转子轴线位置)来等效转轴扭转变形工况。首先,调整1#样机和2#样机的定、转子轴线分别对齐,定子由圆形支架固定,转子通过花键轴对接。然后,保证2#样机定子固定不动,扭转1#样机定子,旋转刻度盘以机械角度1°为步长,测量2台电机电流随扭转角度的变化情况。令1#样机定子逆时针方向旋转时扭转角度为正,两台电机串接空载运行,测得样机电流变化曲线如图11所示。变频器系统采用速度控制开环运行,电磁转矩等于空载转矩。扭转机械角度每旋转1°对应转子位置角θ变化2.5°,两台电机电流呈相悖变化5%以上。
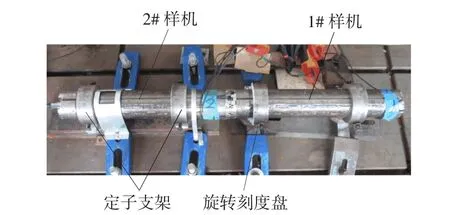
图10 转轴扭转模拟试验台Fig.10 Shaft torsion simulation platform

图11 电流随扭转角度变化曲线Fig.11 Curves of torsion angle and current
3.2组合运行负载试验
采用变频器供电,电机开环运行,对样机进行负载试验,两台样机组合运行试验台如图12所示。

图12 负载测试试验台Fig.12 Load test p latform
样机通过转矩转速传感器与负载端磁粉制动器连接。通过三相功率分析仪对样机端的输入功率、电压、电流等参数进行测量,并通过转矩转速测量仪对负载端的转矩、输出功率进行测量。
图13是组合运行试验100 r/min恒速时,两台样机电流随负载率变化曲线。在负载率OA段:变频器控制转矩角随着负载率的增加而变大,电机电流变化很小甚至减小;由于机械工艺误差,转轴花键对接工艺产生机械角度0.5°扭转,2#样机的转子轴线落后于1#样机转子轴线,故出现2#样机电流小于1#样机电流现象。在负载率AB段:变频器控制转矩角趋近于额定点附近,由于2#样机转子扭转变形量大,其实际转矩角大于额定点,出现定子电流迅速上升并超过1#样机电流现象。额定负载时,较1#样机,2#样机电流增大9.86%,系统总输入电流增大4.93%,总输入功率增加4.47%。保持额定转矩输出不变,利用式(7)反推得到的输入电流增幅为4.28%,与试验测量值基本一致。将2#样机定子逆电机旋转方向扭转错位机械角度0.5°,测得输入电流增幅降到1.46%。

图13 样机负载电流曲线Fig.13 Load current curve for p rototype
4 结论
本文以单元组合式98 mm系列永磁潜油电机为研究对象,对其超细长转轴扭转变形引起的电磁转矩输出下降进行解析计算,利用有限元法对转子等效变形后的电机3D模型进行对比分析,并通过单元电机组合运行验证试验,得到如下结论:
1)对于超细长结构的潜油电机,在扭转角δ一定的情况下,电磁转矩输出随着电机极对数和铁心有效轴向长度的增加而明显下降。
2)较异步机加减速器结构潜油电机,永磁直驱式潜油电机转轴扭转变形引起的电磁转矩下降更加严重。对于极数为10的98 mm系列永磁潜油电机,当电机总长度大于10 m时,最大转矩倍数下降了6.6%。
3)通过理论和样机试验对比,电磁转矩削弱系数的解析表达式与有限元仿真结果和试验测量值一一对应,验证了本文计算永磁潜油电机输出性能下降的准确性。对于单元组合永磁潜油电机的超细长结构,转轴许用应力下的扭转变形和单元电机转子组合工艺偏差是引起电磁转矩输出能力下降、供电电流上升的主要来源。采用单元电机定子逆旋转方向扭转错位结构能有效解决电流上升问题。
参考文献:
[1]郝明晖,张健,郝双晖,等.井下直驱螺杆泵潜油伺服系统的设计[J].机械设计与制造,2011(7):221-223.HAO Minghui,ZHANG Jian,HAO Shuanghui,et al.Design of servo system for direct-driven submersible progressing cavity pump [J].Machinery Design&Manufacture,2011(7):221-223.
[2]徐永明,孟大伟,沙亮.潜油电机设计方法研究及验证[J].电机与控制学报,2012,16(7):72-76.XU Yongming,MENG Dawei,SHA liang.Research and verification of designmethod for submersibl emotor[J].Electric Machines and Control,2012,16(7):72-76.
[3]张玉斌,于海春.潜油电泵机组可靠性研究[J].石油学报,2003,24(4):103-107.ZHANG Yubin,YU Haichun.Reliability of electrical submersible pumping unit[J].Acta Petrolei Sinica,2003,24(4):103-107.[4]李增亮,张来斌,房军.电潜泵潜油电动机转子弯曲振动临界转速分析[J].石油机械,2003,31(2):18-20.LIZengliang,ZHANG Laibin,FANG Jun.Analysis on flexural vibrating critical speed of submersiblemotor for electric submersible pump[J].China Petroleum Machinery,2003,31(2):18 -20.
[5]孔祥龙.潜油螺杆泵驱动电机设计与热分析[D].哈尔滨:哈尔滨工业大学,2011.
[6]张晓庆.116潜油电机轴花键应力计算分析[J].装备制造技术,2013(4):162-163.ZHANG Xiaoqing.Stress calculation and analysis on 116 submersiblemotor shaft spline[J].Equipment Manufacturing Technology,2013(4):162-163.
[7]李哲.提高潜油电机性能的工艺研究与应用[D].北京:中国石油大学,2006.
[8]GALLEGOS L G,GUNAWAN F S,WALTERS JE.Optimum torque control of permanent-magnet AC machines in the fieldweakened region[J].IEEE Transactionson Industry Applications,2005,41(4):1020-1028.
[9]ABU R H,SCHMIRGEL H,HOLTZ J.Maximum torque production in rotor field oriented control of an induction motor at field weakening[C]//ISIE 2007-IEEE International Symposium on Industrial Electronics,Vigo.2007:1159-1164.
[10]JIN Mengjia,FEIWeizhong,SHEN Jianxin.Investigation of axial magnetic force in permanent magnet synchronous machines with rotor step skewing[J].Transactions of China Electrot echnical Society,2013,28(11):19-27.
[11]Dorrell D G,Holik P J,Rasmussen C B.Analysis and effects of inter-bar currentand skew on a long skewed-rotor in ductionmotor for pump applications[J].IEEE Transactions on Magnetics,2007,43(6):2534-2536.
[12]ISLAM R,HUSAIN I,FARDOUN A,et al.Permanent magnet synchronous motormagnet designs with skewing for torque ripple and cogging torque reduction[J].IEEE Transactions on Industry Applications,2009,45(1):152-160.
[13]徐艳平,钟彦儒.扇区细分和占空比控制相结合的永磁同步电机直接转矩控制[J].中国电机工程学报,2009,29(3): 102-108.XU Yanping,ZHONG Yanru.Sectors subdivision and duty ratio control combined direct torque control for permanent magnet synchronous motors[J].Proceedings of the CSEE,2009,29(3): 102-108.
[14]范钦珊.工程力学(静力学和材料力学)[M].高等教育出版社,2009:141-145.
[15]张涛,朱秋,孙晓东,等.基于有限元法的高速永磁转子强度分析[J].电机与控制学报,2012,16(6):63-68.ZHANG Tao,ZHU Qiu,SUN Xiaodong,et al.Strength analysis on high-speed permanent magnet rotor using finite element method[J].Electric Machines and Control,2012,16(6):63-68.
[16]李军,罗应立,刘晓芳,等.低速永磁电动机转矩特性的三维有限元分析[J].电机与控制学报,2011,15(2):13-19.LIJun,LUO Yingli,LIU Xiaofang,et al.Analysis of low-speed PM-motor’s torque characteristics by 3D-FEM[J].Electric Machines and Control,2011,15(2):13-19.
[17]URRESTY JC,RIBA JR,ROMERAL L,etal.A simple2-D finite-element geometry for analyzing surface-mounted synchronous machines with skewed rotormagnets[J].IEEE Transactions on Magnetics,2010,46:3948-3954.
(编辑:刘琳琳)
Analysis of shaft torsion deformation on electro magnetic torque of thin permanent magnet motor for direct-driven submersible screw pum p
ZHANG Bing-yi,LIU Zhong-qi,FENG Gui-hong
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China)
Abstract:In consideration of the allowable torsion deformation of the thinmotor shaft resulting in a output torque decline and a input current rise with submersible motor for screw pump,analytical expression of the allowable torsion anglewas derived and the electro magnetic torque weakened coefficient,the quantitative relation curve of torsion angle was established and electro magnetic torque wasweakened,which provides the theory basis for the failure of submersible screw pump.Unit combination permanent magnet direct-drive submersible motor was developed.The tension stress strength of thin shaftwas analyzed by 3D finite element simulation,then 2D and 3D rotor-skewing equivalent motor model for them echanical stress field and electro magnetic field coupling calculation were established to get the output torque decline.Prototype combination operation experimentwas carried out.Accuracy of analytical expression is verified.
Keywords:thin permanent magnet motor;shaft torsion deformation;electromagnetic torque decline;analytic calculation;3D finite element simulation;combination experiment
通讯作者:刘忠奇
作者简介:张炳义(1954—),男,教授,博士生导师,研究方向为低速大转矩电机、低压大功率电机和低速大功率电机设计与控制;
基金项目:国家863计划项目(2012AA061303)
收稿日期:2014-12-13
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2016)02-0076-07
DOI:10.15938/j.emc.2016.02.011
猜你喜欢
中国设备工程(2022年21期)2022-12-21 15:22:40
中国特种设备安全(2022年4期)2022-07-08 02:42:40
上海大中型电机(2021年1期)2021-06-09 09:12:06
科学与财富(2021年35期)2021-05-10 22:24:50
装备制造技术(2020年4期)2020-12-25 05:26:04
重型机械(2020年2期)2020-07-24 08:16:12
山东冶金(2019年2期)2019-05-11 09:12:24
电脑爱好者(2016年23期)2017-01-05 20:39:51
时代农机(2016年6期)2016-12-01 04:07:20
环境科技(2015年4期)2015-11-08 11:10:40