
考虑侧倾的半主动悬架与电子稳定控制系统集成控制
2016-04-26 06:37:50张亮修杨家颖吴光强
同济大学学报(自然科学版) 2016年3期
张亮修, 杨家颖, 吴光强,2
(1.同济大学 汽车学院,上海 201804;2.东京大学 生产技术研究所,日本,东京 153-8505)
考虑侧倾的半主动悬架与电子稳定控制系统集成控制
张亮修1, 杨家颖1, 吴光强1,2
(1.同济大学 汽车学院,上海 201804;2.东京大学 生产技术研究所,日本,东京 153-8505)
摘要:建立四自由度半车模型,利用滑模变结构控制方法设计以磁流变减振器为执行机构的主动抗侧倾控制策略,研究质心侧偏角相平面稳定边界,设计电子稳定控制(ESC)系统的控制算法.在研究侧翻指标基础上,设计磁流变半主动悬架与ESC的主动防侧翻集成控制算法.通过紧急双移线工况和鱼钩工况对提出的控制策略进行仿真验证,结果显示集成控制策略能够提升操纵稳定性,并有效降低车辆侧倾角,从而降低侧翻危险.
关键词:半主动悬架; 电子稳定控制(ESC); 主动防侧倾控制; 集成控制
近年来,汽车侧倾稳定性逐渐成为人们研究的热点.目前成熟的主动防侧倾控制系统有:德尔福公司的防侧翻控制系统(active stabilizer bar system, ASBS)[1]、宝马公司的主动防侧倾系统(active roll control, ARC)[2]、奔驰公司的主动车身控制系统(active body control, ABC)[3]和保时捷公司的动态底盘控制系统PDCC(Porsche dynamic chassis control)[4]等.这些主动侧倾控制系统具有以下特点:①基本都是采用悬架系统、转向系统及制动系统等多系统的集成控制;②只在豪华型汽车上得到应用.因此,研究通过多个子系统的集成控制,实现汽车侧倾姿态控制具有一定的工程意义及产业价值.
国内、外学者针对侧倾稳定性开展了研究,主要通过主动/半主动悬架控制[5]、差动制动控制[6]等方法来抑制汽车侧倾.在集成控制方面,主要是在电子稳定控制系统(electronic stability control, ESC)基础上加入防侧倾控制算法[7-8],提高汽车主动安全性,但在集成控制方面研究不足.
目前,ESC已在汽车上得到广泛应用,半主动悬架作为传统被动悬架与主动悬架之间的折衷方案,通过改变减振器阻尼以适应不同道路和行驶工况的需要,结构简单,成本远低于主动悬架,代表了未来智能悬架系统发展方向.本文以磁流变半主动悬架与ESC为控制对象,针对车辆存在较高程度的侧翻危险问题,开展考虑侧倾稳定性的半主动悬架与ESC集成控制研究.
1磁流变半主动悬架控制策略设计
1.1考虑侧倾的四自由度半车模型

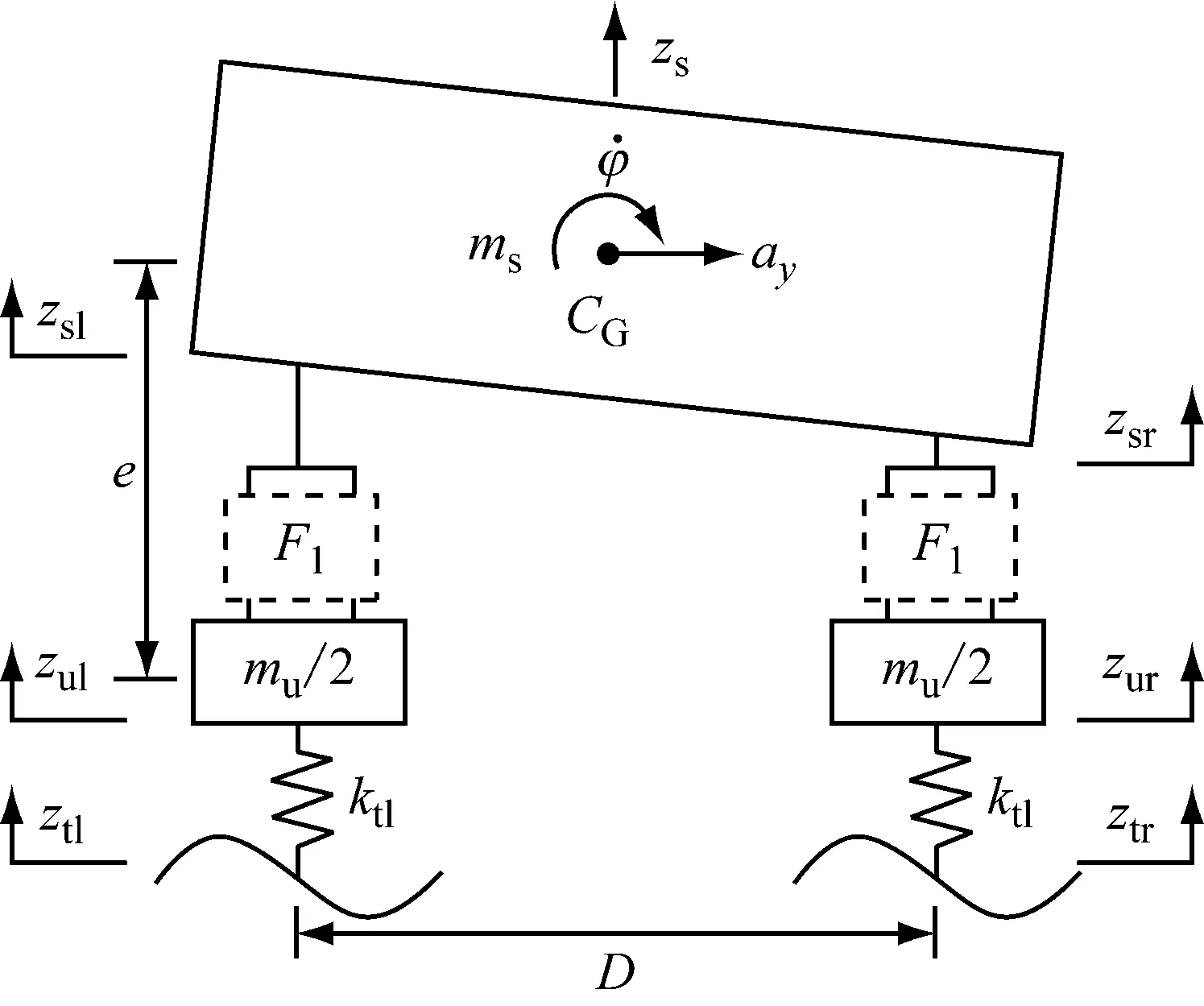
图1 四自由度半车模型
四自由度半车模型运动方程可表示为
(1)
(2)
(3)
(4)

1.2半主动悬架主动抗侧倾策略
本文主要考虑对车辆侧倾运动的控制,通过磁流变减振器实现半主动悬架阻尼的连续可调,产生防止车辆侧倾的附加力矩.因此在前面四自由度半车模型基础上,选取侧倾角φ为控制量,将式(2)写成另一种形式,即:
(5)
式中:Cd为侧倾阻尼;Ks为侧倾刚度;Mu为通过磁流变减振器产生的附加阻尼力矩.
以侧倾角φ为控制目标,假设期望系统输出侧倾角为φd,则跟踪误差err为
(6)
定义积分滑模面:
(7)

则式(7)可以写成:
(8)
式(7)—(8)中:k1和k2为非零正常数.若期望系统输出侧倾角为φd=0,则对滑模面s进行求导,可得:
(9)
同时,结合式(5)可得:
(10)


(11)
式中,ε,c均为正的常数.
综合式(7)、(10)与(11),可得:
(12)
由此可得,使簧上质量回到预期侧倾角所需的附加力矩为
(13)
为了削弱滑模控制自有的抖振现象,在控制中引入准滑动模态控制,即用饱和函数sat(s)代替符号函数sgn(s):
(14)
其中,Δ称为“边界层”.上述处理的本质为:在边界层外,采用切换控制,在边界层内采用线性化反馈控制.
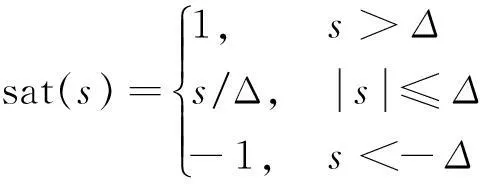
式(13)中所得附加力矩是将簧上质量的侧倾角调整为预期值的理想附加力矩.而对于磁流变减振器而言,附加力矩是通过调节左、右阻尼力的大小及差异实现的,在某一瞬间能够产生的附加阻尼力矩受两个因素的限制:一是左、右两侧簧上质量与簧下质量相对运动的速度,在相同阻尼的情况下,相对运动速度越大,产生阻尼力越大,从而产生的防侧倾力矩也越大,但对于车辆而言应该尽可能地控制簧上质量与簧下质量的相对运动速度在小范围内;二是调节阻尼的励磁电流受客观制约不可能无限大,在本文中限定最大电流为2.5 A.因此,在得到期望附加力矩Mu的基础上,首先对各减振器的输出阻尼力进行决策,然后根据磁流变减振器特性得到期望的励磁电流.
由于主要对侧倾进行控制,故在决策当中让位于同一侧的前后磁流变减振器输出相同的阻尼力,即Fedl=Fedfl=Fedrl,Fedr=Fedfr=Fedrr,其中Fedl与Fedr分别为左、右磁流变减振器期望阻尼力,Fedfl与Fedrl分别为前、后磁流变减振器阻尼力,Fedfr与Fedrr分别为右侧前、后磁流变减振器阻尼力,具体决策过程如下:

(15)
式中:Df、Dr分别为前、后轴轮距.
(16)
(17)
(18)
得到期望的减振器阻尼力后,则可进一步得到减振器励磁电流.在不同电流下,磁流变减振器的阻尼力与减振器两端相对速度呈现较强的非线性[9],为提高抗侧倾阻尼调节的实时性,对磁流变减振器力-速度(FMR-Vdam)特性进行一定的线性化以便于励磁电流决策,如图2所示.
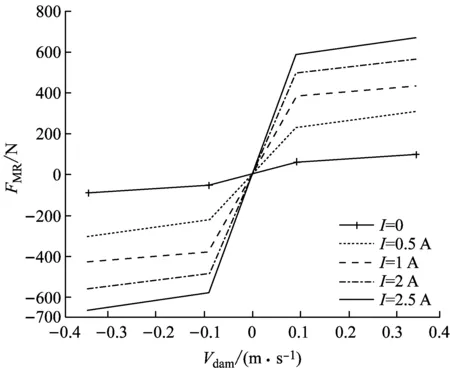
图2 磁流变减振器力-速度特性及其线性化图
Fig.2Force-speed characteristic and linearization of magneto-rheological damper
经过线性化后,可通过查表及插值的方法决策出所需要的电流大小.如图3所示,假设某一瞬时减振器上下两端相对运动速度为v,而对应的减振器理想输出力为Fed,则点P(v,Fed)必然属于以下区域之一:



图3 电流大小决策图
Imax,Imin,此时可通过插值法确定励磁电流:
(19)
式中:Fdmax·Fdmin分别为理想阻尼力Fed的上、下界.

2ESC控制策略设计
2.1质心侧偏角相平面稳定区域研究
车辆质心侧偏角反映了车辆偏离期望轨迹的程度,是车辆稳定性控制的一个重要指标.质心侧偏角相平面中存在一个稳定区域,此区域内的相轨迹始终向着质心侧偏角绝对值减小方向发展,因而将质心侧偏角的相轨迹控制在相平面稳定区域内可以有效保持车辆的横向稳定性[10].
假设车辆纵向行驶速度不变,车辆质心侧偏角与质心侧偏角变化率分别为
(20)
(21)


图4所示为车速为路面附着系数为0.6和0.9时,车速分别为20 m·s-1和30 m·s-1的相图,粗定线为稳定边界.为了描述相平面稳定边界,本文采用与文献[11]类似的方法,即:
(22)
式中,E1、E2为稳定边界常数,通过对不同路面附着系数和车速取值下相图分析以及最小二乘法拟合,得到E1、E2关于车速u及附着系数μ的关系如下:
(23)
a μ=0.6,u=20 m·s-1
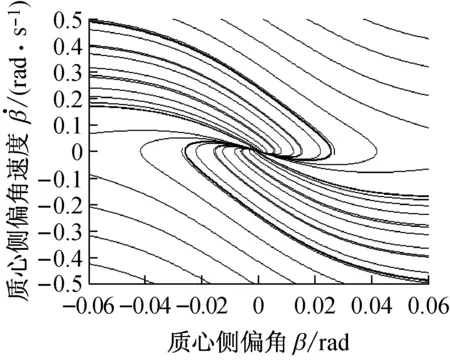
b μ=0.6,u=30 m·s-1
c μ=0.85,u=20 m·s-1
d μ=0.9,u=30 m·s-1
(24)
2.2ESC控制器设计
基于以上对质心侧偏角相平面稳定区域的分析和研究,进行ESC控制器的设计.
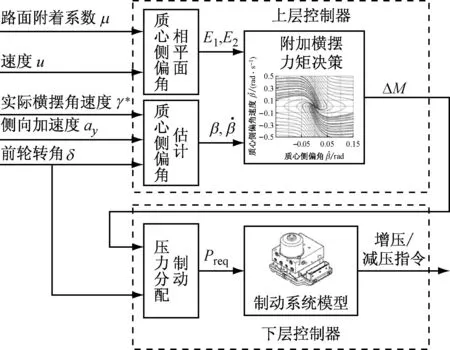
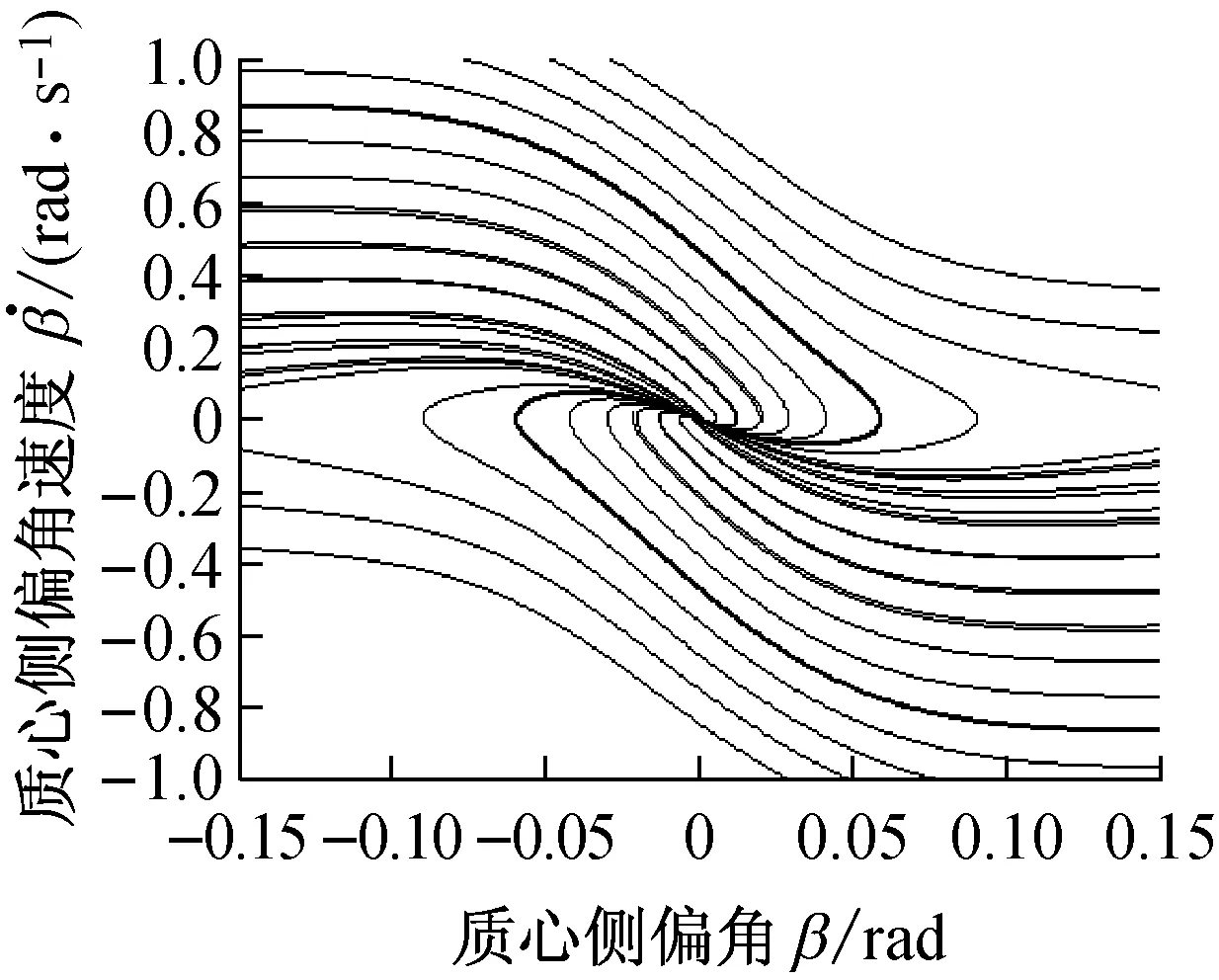
图5 基于质心侧偏角相平面稳定区域控制器框图
(25)
综合Δβ、前轮转角δ与P点在相平面的位置计算ΔM,其大小由如下规则决定:
(26)
式中,Kβ通过试验测得,ΔM的正负由前轮转角δ和P点位置确定,如表1所示.
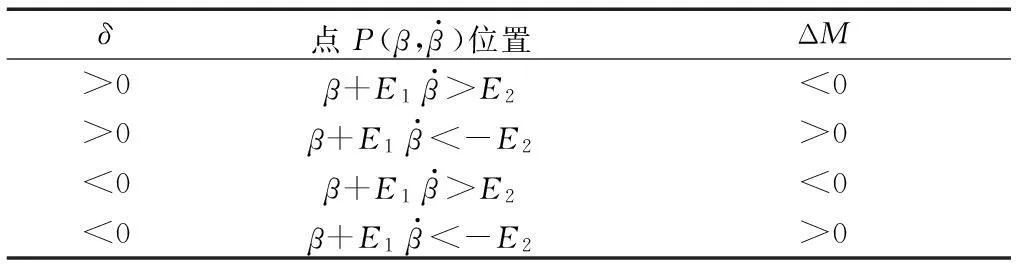
表1 附加横摆力矩方向的确定
下层控制器则主要用于决策出所需要增压的车轮以及轮缸需求制动压力Preq,并基于制动系统模型得出增压、减压指令,本文采用单轮制动的方式,具体制动车轮的选择由表2确定.
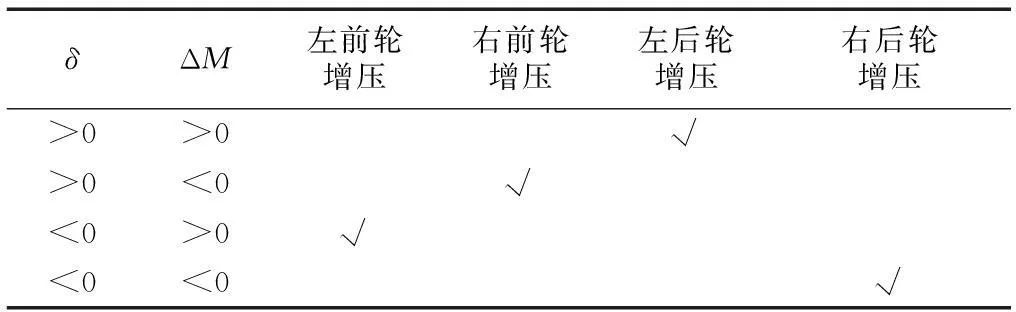
表2 具体制动车轮的选择
所选择车轮的轮缸需求制动压力为
(27)
式中:preq为轮缸制动压力;rw为车轮滚动半径;RM为制动车轮的横摆力臂;Rbrk为制动器有效作用半径;Abrk为制动轮缸活塞有效面积;Kef为单位制动轮缸推力产生的制动器制动力.
3考虑防侧翻的集成控制策略设计
3.1侧翻指标
采取车辆横向载荷转移率作为侧翻指标,即:
(28)
式中:RI为侧翻指标;Fzout为外侧车轮的垂向载荷;Fzin为内侧车轮的垂向载荷.
如图6所示为汽车转向时的准静态侧翻受力分析.为了便于分析,近似认为簧上质量质心与整车质心重合且等于整车质量m,质心高度为h,质心到侧倾中心O的竖直距离为e,侧倾中心离地高度为hR,质心处侧向加速度为ay,车身侧倾角为φ,轮距为T,Fl和Fr为左右两侧的悬架力.

图6 准静态侧翻时汽车受力分析
汽车绕侧倾中心的力矩平衡方程为
(29)
式中,Kφ为悬架等效侧倾角刚度.
由此得到汽车的侧倾角估计值为
(30)
汽车绕地面轮距中心的侧倾力矩平衡方程为
(31)
由此可得侧向载荷转移率为
(32)
可以看出,侧翻指标与汽车侧向加速度和侧倾角有关,降低汽车侧向加速度和侧倾角可以有效地防止汽车侧翻.
将式(30)中得出的φ代入式(32)中,可得:
RI=
(33)
汽车直线行驶时,RI≈0;随着汽车左、右载荷转移量的增加,RI值不断增加;当RI≈1时,认为有一侧车轮离地,此时如果稍有外界扰动就很容易造成侧翻,所以当RI≈1时再进行控制起不到防侧翻效果,同时前面研究的是汽车准静态侧翻,只有在侧向加速度变化较慢时才是合理的.研究表明,汽车的瞬态侧倾阀值比准静态时小15%左右[14],故本文选取RI,thres=0.75作为侧翻阀值,当检测到RI达到侧翻阀值时立即施加稳定性控制,抑制汽车侧翻趋势而将控制目标锁定在RI,target=0.65左右.
3.2半主动悬架与ESC集成控制策略设计
汽车侧翻一般发生在侧向失稳的情况,此时汽车的侧向运动往往已失去控制.因此要降低侧翻风险,一方面可以通过悬架系统的阻尼变动降低车身侧倾角;另一方面在侧倾指数RI未触及警戒值时,应该保持ESC以正常模式防止汽车丧失侧向稳定性,而当侧倾指数RI接近侧翻阈值时,由式(33)可以看出,可以通过ESC系统对汽车施加差动制动以防止侧翻,原理如下:
(1)通过差动制动可以降低汽车前进速度,从而使车辆的侧向加速度降低;

(3)通过对车辆施加附加横摆力矩,使车辆增加不足转向的趋势,从而降低因过多转向而导致的车辆侧翻.
对于差动制动而言,各个车轮上制动力所能产生的横摆力矩不一样,当汽车在前外轮上施加制动力时,汽车能产生一个平滑增大的向外侧横摆力矩,能使过多转向的汽车产生更多不足转向的趋势.因此,本文选择使用前外轮实行差动制动方式防止侧翻.
当RI达到阀值RI,thres时,使车辆恢复侧倾稳定状态所期望的侧向加速度值为
(34)
将期望侧向加速度aydes与实际侧向加速度ay之间的差值eay作为比例-积分-微分(proportional-integral-derivative, PID)控制器的输入量,将附加横摆力矩ΔM作为输出量:
(35)
则PID控制器的控制规律为
ΔM=Kpeay(t)+
(36)
式中,Kp、Ki、Kd分别为PID控制器的比例常数、积分常数与微分常数.则附加制动力ΔFxfo与附加横摆力矩Tf的关系如下:
(37)
式中:a为车辆质心到前轴距离;δ为前轮转角.
由此前外轮的轮缸制动压力为
(38)
式中:rw为车轮滚动半径;Rbrk为制动器有效作用半径;Abrk为制动轮缸有效面积;Kef为单位制动轮缸推力产生的制动器制动力.
4仿真及结果分析
为验证提出的控制策略,本文搭建整车动力学模型并设计控制算法,在双移线工况和鱼钩工况进行仿真及结果分析.
4.1双移线工况
仿真时,车速为120 km·h-1,路面附着系数取为0.85,针对无控制(不施加半主动悬架和ESC控制)、独立控制(只施加ESC独立控制)、集成控制(半主动悬架和ESC集成控制)三种情况进行仿真对比.仿真结果如图7—14所示.
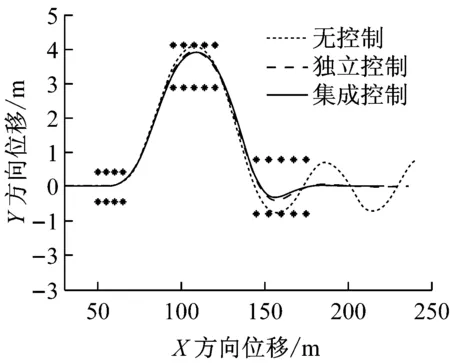
图7 汽车运行轨迹
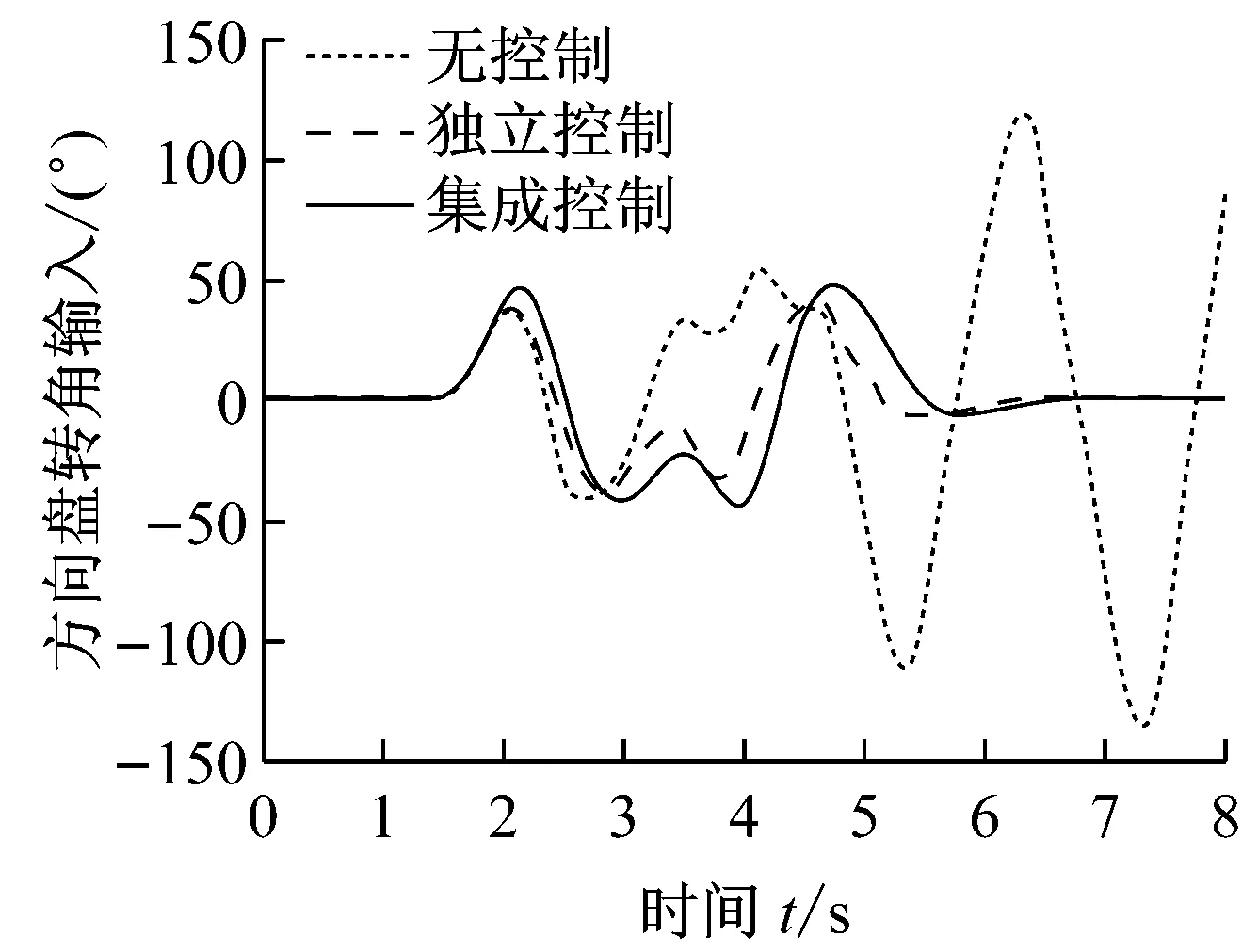
图8 双移线工况方向盘转角输入
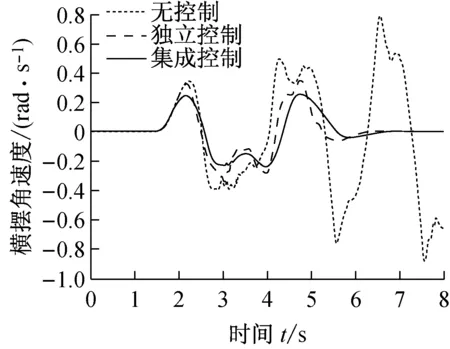
图9 双移线工况横摆角速度
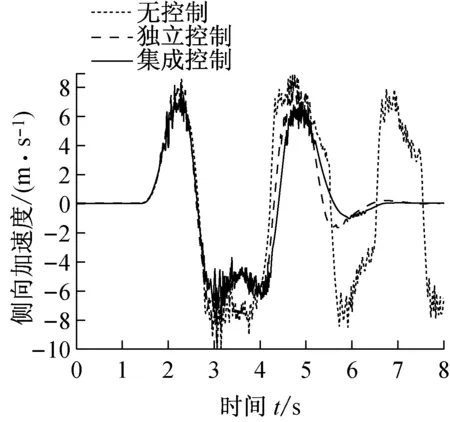
图10 双移线工况侧向加速度
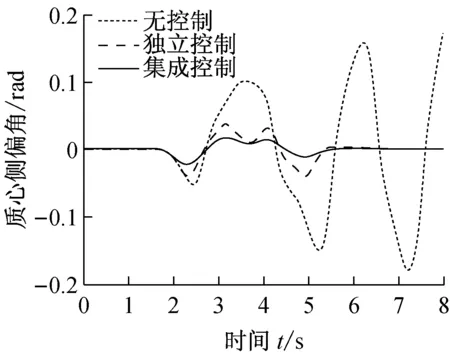
图11 双移线工况质心侧偏角
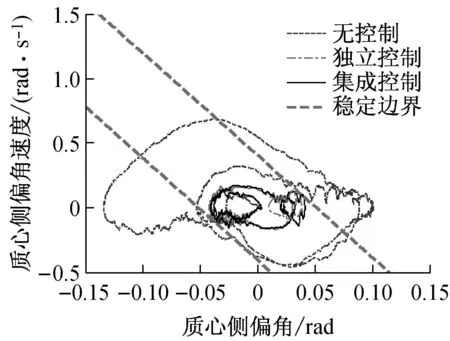
图12 双移线工况质心侧偏角相轨迹
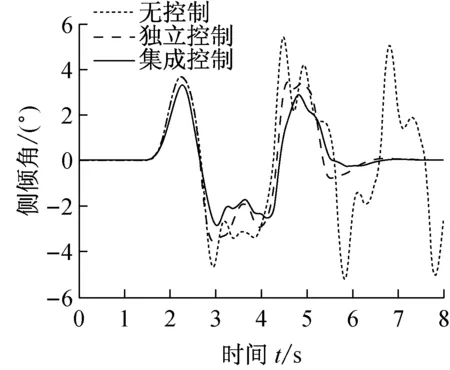
图13 双移线工况侧倾角
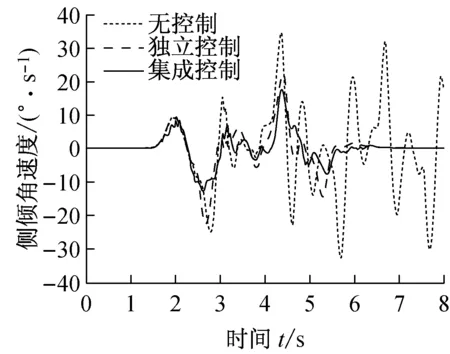
图14 双移线工况侧倾角速度
从图7的车辆运行轨迹可以看出,无控制时的车辆运行轨迹出现了冲撞路障的情况,且相比理想运动轨迹有较为严重的左右偏离,可见此时车辆已经失去方向稳定性;而使用独立控制和集成控制的车辆能够以比较理想的运行轨迹通过三处路障.同时,从图9—10中可以看出,采用独立控制与集成控制的车辆,其横摆角速度和侧向加速度的波动幅值都比无控制时小,表明所设计的ESC控制策略能够有效提升车辆的侧向稳定性及轨迹跟随能力.从图12的质心侧偏角相平面图可以看出,独立控制与集成控制的车辆相轨迹更好地保持在稳定区域内,而无控制的车辆则偏离稳定区域较多,这与其失稳表现吻合.
从防侧倾的角度,在图13和图14中,无控制时的车辆侧倾角幅值及波动都更大,这主要是因为其出现失稳情况所致;而独立控制的侧倾角小于无控制情况,这是由于ESC将质心侧偏角控制在合适区域内,让汽车保持了一定的侧向稳定性;采用集成控制的汽车侧倾角最小,从而验证了半主动悬架起到防侧倾的效果.
4.2鱼钩工况
为验证控制策略对于汽车防侧翻的控制效果,选用鱼钩工况进行仿真验证.车速为108 km·h-1,路面附着系数设置为0.9,方向盘输入如图15所示,仿真结果见图16—18.
从图16的侧翻指标可以看出,同样的车速与方向盘输入情况下,无控制时车辆侧翻指标的波动幅值要大于独立控制和集成控制的情况,最大的时候甚至达到1,这意味着有一侧车轮接近离地,这对车辆而言无疑是十分危险的;而使用了独立控制的车辆侧翻指标则比无控制的情况下小,但仍有出现高于0.8的情况,相比之下,采取了集成控制的车辆能够基本将侧翻指标控制在0.65的目标值范围内,表明车辆的载荷转移相对更加平稳.之所以出现上述差异,是因为独立控制过程ESC对车辆的侧向运动进行了一定的控制,从而抑制了侧向加速度,而集成控制则一方面通过差动制动降低车辆的侧向加速度,另一方面对悬架阻尼进行控制以产生主动抗侧倾力矩,从而进一步降低车辆的侧翻危险度.从图17中可以看出,采用了集成控制的车辆侧向加速度明显低于无控制与独立控制情况,这是由于集成控制中加入了ESC的差动制动以降低侧向加速度的缘故.图18中可以看出,从降低侧倾角的方面,集成控制明显优于无控制与独立控制的情况,从而验证所设计的集成控制策略的有效性.
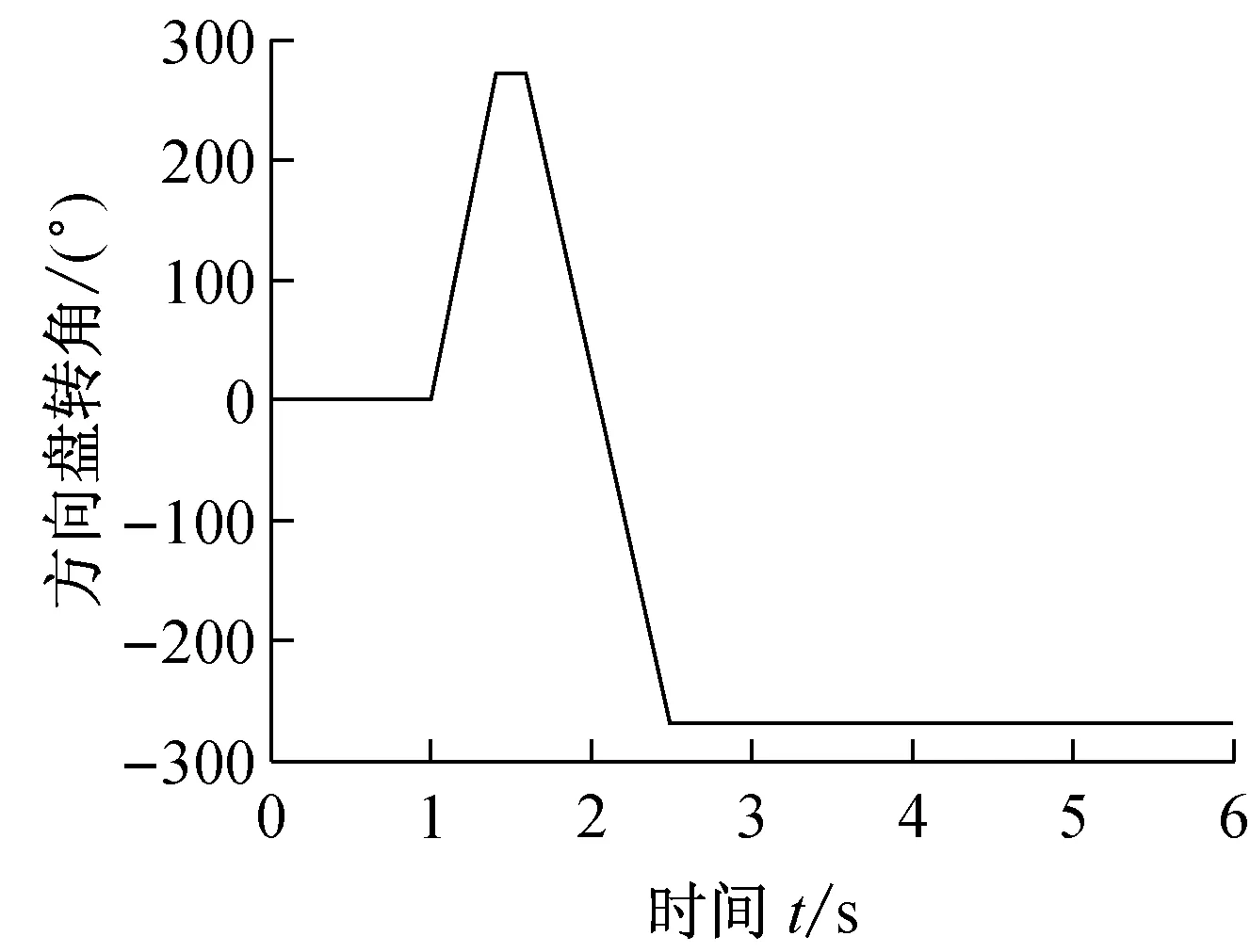
图15 鱼钩工况方向盘转角输入

图16 鱼钩工况侧翻指标
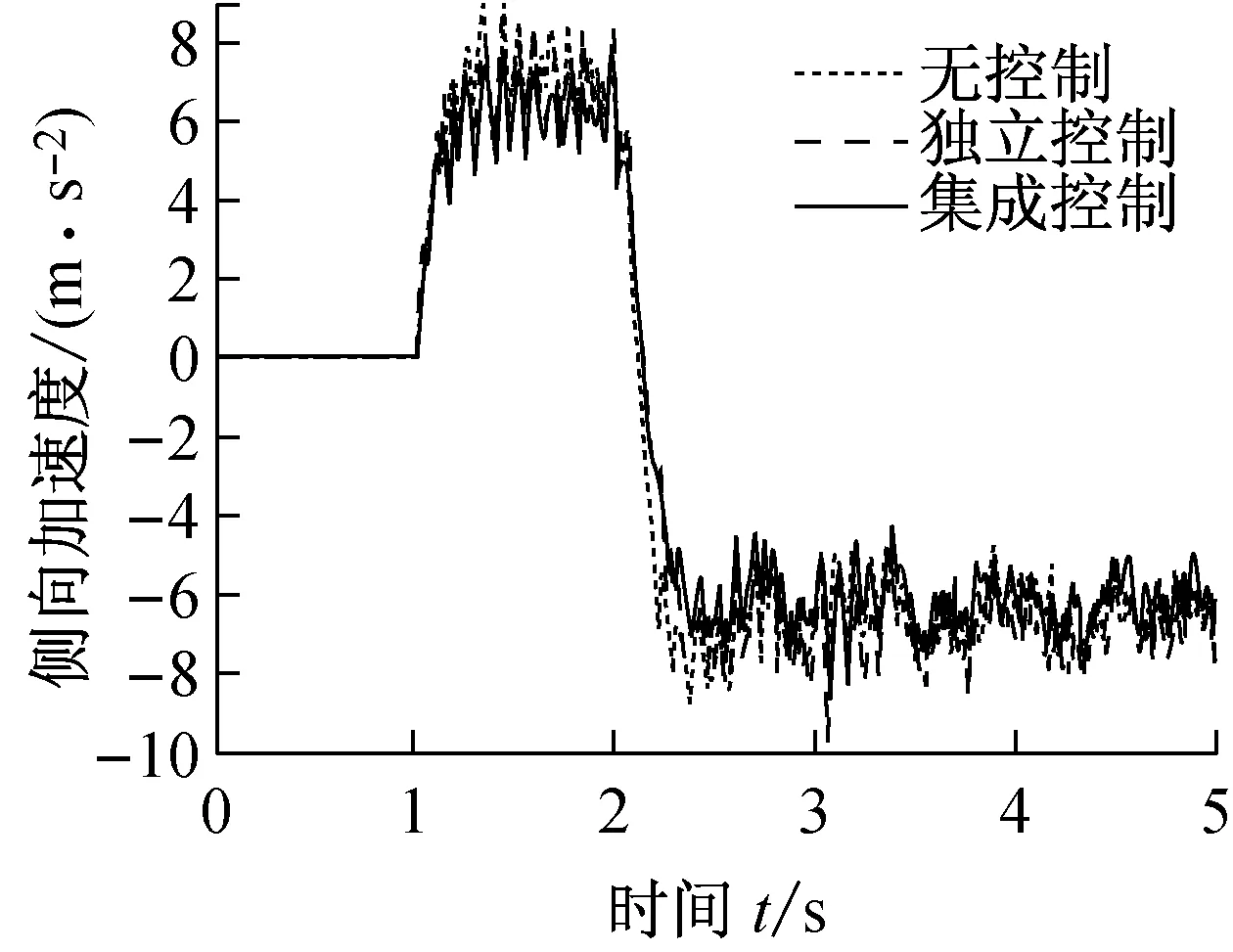
图17 鱼钩工况侧向加速度
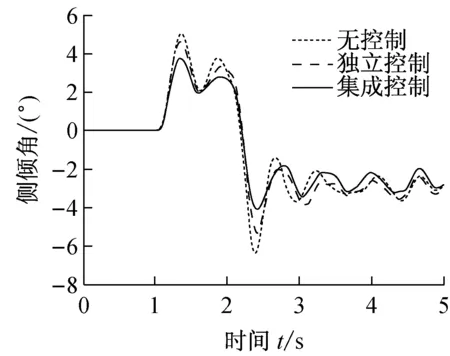
图18 鱼钩工况侧倾角
5结论
本文围绕提升汽车的操纵稳定性及防侧翻能力的问题展开研究,分别设计了磁流变半主动悬架与ESC的控制策略,继而设计了二者的集成控制策略.最终通过双移线工况与鱼钩工况进行了仿真验证,试验结果表明,所设计的半主动悬架控制策略能够有效降低车辆的侧倾角,而所设计的ESC控制策略能够将质心侧偏角控制在相平面稳定区域内.同时,所设计的半主动悬架与ESC集成控制策略能够有效降低车辆的侧翻危险,提升操纵稳定性与行驶安全性.
参考文献:
[1]霍庆泽. 平稳防御——第三代德尔福 ASBS 防侧翻控制系统[J]. 世界汽车, 2008(9): 129.
HUO Qingze. Stable defense-the third generation ASBS rollover prevention control system of Delphi [J]. World Auto, 2008(9): 129.
[2]Strassberger M, Guldner J. BMW's dynamic drive: an active stabilizer bar system[J]. Control Systems, IEEE, 2004, 24(4): 28.
[3]Merker T, Girres G, Thriemer O. Active body control (ABC) the DaimlerChrysler active suspension and damping system[R]. [S.l.]: SAE, 2002.
[4]Seifert G, Bofinger G, Thierer M. The driving dynamics of the new Porsche 911 Turbo [J]. ATZ worldwide, 2001, 103(6): 26.
[5]Cheria V, Shenoy R, Stothert A,etal. Model-based design of a SUV anti-rollover control system[R].[S.l.]: SAE, 2008.
[6]Yoon S, Jung J, Koo B,etal. Development of rollover prevention system using unified chassis control of ESP and CDC systems[R].[S.l.]: SAE,2006.
[7]Yoon J, Cho W, Koo B,etal. Unified chassis control for rollover prevention and lateral stability[J]. Vehicular Technology IEEE Transactions on, 2009, 58(2):596.
[8]Yoon J, Cho W, Kang J,etal. Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J]. Control Engineering Practice, 2010, 18:585.
[9]Uradnicek J, Musil M. Study of adaptive control algorithm using hysteretic magneto-rheological damper model in 1/4 car suspension [J]. Strojnicky Casopis, 2008, 59(4): 175.
[10]陈无畏, 刘翔宇, 黄鹤, 等. 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48(14): 112.
CHEN Wuwei LIU Xiangyu HUANG He,etal. Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. Journal of Mechanical Engineering, 2012, 48(14): 112.
[11]Koibuchi K, Yamamoto M, Fukada Y,etal. Vehicle stability control in limit cornering by active brake[R]. [S.l.]: SAE, 1996.
[12]杨福广, 李贻斌, 阮久宏, 等. 基于扩张状态观测器的路面附着系数实时估计[J]. 农业机械学报, 2010(8): 6.
YANG Fuguang, LI Yibin, RUAN Jiuhong,etal. Real-time Estimation of tire road friction coefficient based on extend state observer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010(8): 6.
[13]付皓. 汽车电子稳定性系统质心侧偏角估计与控制策略研究[D]. 长春: 吉林大学, 2008.
FU Hao. Research on sideslip angle estimation and control algorithm for vehicle electronic stability system[D]. Chagnchun: Jilin University, 2008.
[14]吴光强. 汽车理论[M].北京:人民交通出版社, 2014.
WU Guangqiang. Automotive theory[M]. Beijing: China Communications Press, 2014.
Integrated Control Based on Semi-active Suspension and Electronic Stability Control System Considering Active Roll Control
ZHANG Liangxiu1, YANG Jiaying1, WU Guangqiang1,2
(1.School of Automotive Studies, Tongji University, Shanghai 201804, China; 2.Institute of Industrial Science, University of Tokyo, Tokyo153-8505, Japan)
Abstract:A half car model with four degrees of freedom is built, and the sliding mode control theory is applied to prevent vehicle rollover which using magneto-rheological fluid dampers as their actuators. Based on the study of stable area on side-slip angle phase portraits, the control algorithm of electronic stability control (ESC) system is set up. Considering the rollover index, the integrated control algorithm with semi-active suspension and ESC is designed. The algorithm is verified by simulation with double-lane change maneuver and fish hook test, and the simulation results indicate that the integrated control algorithm can improve vehicle handling stability and decrease roll angle, which reduces the danger of rollover efficiently.
Key words:semi-active suspension; electronic stability control (ESC); active roll control;integrated control
文献标志码:A
中图分类号:U463.55
通讯作者:吴光强(1965—),男,工学博士,教授,博士生导师,主要研究方向为汽车现代设计理论与方法以及车辆动力学及其控制.
基金项目:高等学校博士学科点专项科研基金资助项目(20120072110013)
收稿日期:2015-04-19
第一作者: 张亮修(1982—),男,博士生,主要研究方向为车辆动力学集成控制技术.E-mail: zhangliangxiu@163.com
E-mail: wuguangqiang@tongji.edu.cn
