非线性系统自适应鲁棒控制器设计
2016-04-25 06:20焦鑫江驹
哈尔滨工程大学学报 2016年3期
关键词:不确定性
焦鑫,江驹
(南京航空航天大学 自动化学院,江苏 南京 200016)
非线性系统自适应鲁棒控制器设计
焦鑫,江驹
(南京航空航天大学 自动化学院,江苏 南京 200016)
摘要:针对非线性系统模型参数具有不确定性的问题,利用二型模糊逻辑控制器特别适合于解决不确定性问题的优点和特点,提出二型模糊自适应滑模控制方法,设计了具有自适应和鲁棒性的非线性系统控制器。首先对非线性系统进行精确线性化,然后选取合适的滑模面,并设计了二型模糊逻辑系统,通过李亚普诺夫稳定性理论分析,得到自适应控制律。通过仿真实例验证,对比分析并验证了该控制方法能够克服不确定性参数的干扰,从而更好地控制非线性系统,使其具有一定的自适应性和鲁棒性。
关键词:自适应鲁棒控制器;非线性系统;不确定性;二型模糊逻辑系统;自适应性;滑模控制
对非线性系统进行控制器设计时,往往会涉及模型参数不确定的问题,控制器设计的好坏直接决定系统性能和安全[1-2]。例如,飞行器在高空飞行时,由于大气参数和气动参数具有不确定性[3],如果飞行控制器不能很好的适应环境,缺乏一定的鲁棒性,那么飞行器的安全性将得不到保证[4-5]。
近年来,国内外学者针对这一问题进行了一定的研究。文献[6]利用神经网络参数的在线调整和动态非线性阻尼控制设计了飞行控制器,使飞行控制系统能够跟踪给定信号,具有一定的鲁棒性。文献[7]将多输入系统看作多分布子系统,提出一种自律鲁棒自适应分散控制的新方法,结合直接反馈线性化和最优控制,给出了自律最优鲁棒自适应分散控制的设计方法。文献[8]利用确定性鲁棒控制方法对参数摄动的最坏情况进行研究,提出一种基于概率估计的H鲁棒控制方法,设计出的控制器具有较大的保守性和较高的控制成本。文献[9]结合高增益的反馈控制和基于在线优化跟踪控制器的前馈控制针对具有约束条件和不确定性的MIMO系统设计了自适应鲁棒控制器。
本文针对非线性系统模型参数不确定问题提出基于二型模糊自适应滑模控制的控制方法,该方法利用二型模糊逻辑控制器特别适合于解决不确定性问题的优点和特点[10-11],选取合适的滑模面,作为二型模糊控制系统的输入,经过降型器和去模糊化结算后得到系统输出,再经过李亚普诺夫稳定性分析得到自适应律,为不确定非线性系统提供了一种新的控制方法。
1精确线性化
考虑不确定性MIMO非线性系统:
(1)
其中
式中:x∈Rn,u∈Rm,y∈Rm;f,gi是Rn上充分光滑的向量场;hi是充分光滑的标量函数。
考虑第j个输出yj对时间的导数:

(2)
状态反馈律为
2二型模糊自适应滑模控制及稳定性分析
对于非线性系统来说,往往涉及模型参数不确定的问题,本文提出二型模糊自适应模糊控制的方法设计控制器,系统结构如图1所示。

图1 二型模糊自适应滑模控制的系统结构图Fig. 1 The system structure of type-2 fuzzy adaptive sliding mode control
图1中,选取的滑模面作为二型模糊逻辑控制器的模糊输入,经过模糊推理,降型和解模糊化可以得到二型模糊的清晰输出,补偿控制律用来补偿二型模糊控制器的输出与控制律最优解的差值,使控制器具有较好的鲁棒性,估计器用来估计补偿控制律中的一些变量值,根据李亚普诺夫稳定性分析可以得到自适应律,使控制器具有自适应性。
2.1滑模面的选取
设K为系统输入的个数,第j个滑模面为

(3)
显然,当λi选择合适的参数时,跟踪误差将收敛为0,即得到控制律的最优解U*。根据式(2)、(3)可得
(4)
但是在实际中,B(x)的状态量往往有一些不确定性,所以不能直接得到控制律的最优解U*。当非线性系统具有不确定性时,系统控制律为
(5)
式中:矩阵B(x)为确定性矩阵,即参数为确定的;B(Δx)为不确定矩阵,即参数为不确定的。
2.2二型模糊自适应滑模控制器设计
设二型模糊自适应滑模控制律为Uf,用于估计理想控制律U*。使用具有不确定均值的高斯主隶属函数作为输入和输出的隶属函数。第i个二型模糊逻辑系统的模糊规则可以描述为
(6)

(7)
其中
其中
对于控制律U,二型模糊将被分别用于每个控制器输入通道,其中S作为二型模糊的输入,Uf作为二型模糊的输出。

(8)


(9)

(10)
所以,二型模糊自适应滑模控制器的控制律可以表达为
(11)

(12)

所以,式(2)可重写为
(13)
根据式(3)、(4)、(13),可以得到
(14)
2.3稳定性分析

(15)
式(15)的导数为
(16)
根据上式,式(16)可以重写为
(17)
根据式(17)可以说明系统是稳定的。
为了克服滑模控制的抖振现象,本文将利用饱和函数来代替符号函数:

所以,Ujn被重写为
3仿真实例
3.1仿真条件设定
高超声速飞行器,具有快时变,严重非线性,强耦合,以及模型不确定等特点[13-14],所以飞行控制系统设计具有很大的难度。根据力和力矩平衡,可建立高超声速飞行器纵向模型[15]:
式中:V、γ、q、α、h分别表示高超声速飞行器的速度、轨迹角、俯仰角速率、迎角以及高度;β、ω、ξ分别表示发动机节流阀调定值、固有频率以及阻尼系数;m、μ、r、My、Iy分别表示质量、万有引力常量、地球半径、俯仰力矩系数以及惯性力矩系数。升力L、阻力D、推力T如下
式中:CL、CD、CT分别表示升力系数、阻力系数、推力系数,ρ、s分别表示空气密度、机翼参考面积。
参数不确定性主要体现在模型参数和气动参数的不确定。本文中,不确定参数作为外加变量加入正常变量中用于控制器设计。主要参数如下:
表1分别列出滑模面SV和Sh的初始隶属函数参数值。

表1 滑模面SV、Sh的初始隶属函数参数值
根据本文所论述的方法,可以得到控制律:
其中
3.2速度信号和高度信号阶跃响应
在速度信号阶跃响应仿真验证中,速度指令信号40 m/s的阶跃信号,仿真结果如图2所示。
在高度信号阶跃响应仿真验证中,高度指令信号为40 m的阶跃信号,仿真结果如图3所示。
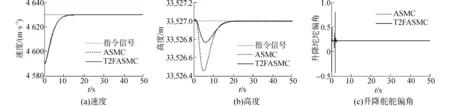
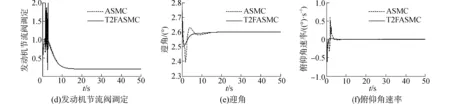
图2 速度指令为40 m/s的阶跃响应Fig. 2 Response to a 40 m/s step-velocity command
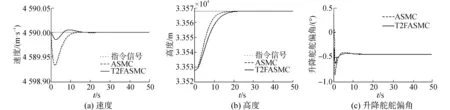

图3 高度指令为40 m的阶跃响应Fig. 3 Response to a 40 m step-altitude command
4结论
从速度信号阶跃响应和高度信号阶跃响应两种控制效果来看,对比文献[16]所提出的自适应滑模控制器,本文所提出的具有自适应鲁棒性的二型模糊自适应滑模控制器具有明显的优势。
1)对于速度信号阶跃响应,高度、升降舵偏角、发动机节流阀调定、迎角、轨迹角、俯仰角速率以及滑模面的变化量都明显小于自适应滑模控制器控制效果的变化量,尤其是升降舵偏角变化量和俯仰角速率变化量,这不仅说明本文所论述的控制器鲁棒性更强,而且从工程角度来说,能够使飞行器的机动性更强,也更节约能源。
2)对于高度信号阶跃响应,虽然二型模糊自适应滑模控制器比自适应滑模控制器的响应速度略慢,但是控制效果优势明显,其中,速度、升降舵偏角、发动机节流阀调定、迎角、轨迹角、俯仰角速率以及滑模面的变化量都明显小于自适应滑模控制器控制效果的变化量,从而使高超声速飞行器的稳定性更好,鲁棒性更强,而且能够提高飞行器的机动性,也更节约能源。
总之,从仿真结果可以看出,二型模糊自适应滑模控制能够提高非线性系统的稳定性,跟踪性能以及鲁棒性。
参考文献:
[1]CHANG Y H, CHAN Weishou. Adaptive dynamic surface control for uncertain nonlinear systems with interval type-2 fuzzy neural networks[J]. IEEE transactions on cybernetics, 2014, 44(2): 293-304.
[2]SENTHILKUMAR D, MAHANTA C. Identification of uncertain nonlinear systems for robust fuzzy control[J]. ISA transactions, 2010, 49(1): 27-38.
[3]ZHANG Ruimin, SUN Changyin, ZHANG Jingmei, et al. Second-order terminal sliding mode control for hypersonic vehicle in cruising flight with sliding mode disturbance observer[J]. Journal of control theory and applications, 2013, 11(2): 299-305.
[4]GAO Gang, WANG Jinzhi, WANG Xianghua. Robust tracking control for an air-breathing hypersonic vehicle with input constraints[J]. International journal of systems science, 2014, 45(12): 2466-2479.
[5]FIORENTINI L, SERRANI A, BOLENDER M A, et al. Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J]. Journal of guidance, control, and dynamics, 2009, 32(2): 402-417.
[6]陈龙胜. 综合非线性鲁棒飞行控制系统设计[J]. 南昌航空大学学报: 自然科学版, 2014, 28(1): 14-20.
CHEN Longsheng. Design of robust adaptive flight controller based on nonlinear dynamics[J]. Journal of Nanchang hangkong university: natural sciences, 2014, 28(1): 14-20.
[7]谷志锋, 朱长青, 邵天章. 分布式多输入系统的自律鲁棒自适应分散控制[J]. 控制与决策, 2014, 29(9): 1545-1552.
GU Zhifeng, ZHU Changqing, SHAO Tianzhang. Autonomous robust adaptive decentralized control for distributed multi-input system[J]. Control and decision, 2014, 29(9): 1545-1552.
[8]谢蓉, 王新民, 巩建英. 范数有界型参数不确定性系统的概率鲁棒 控制方法[J]. 控制与决策, 2014, 29(7): 1301-1305.
XIE Rong, WANG Xinmin, GONG Jianying. Probabilistic robust control method of norm-bounded parameter uncertainty system[J]. Control and decision, 2014, 29(7): 1301-1305.
[9]LU Lu, YAO Bin. Online constrained optimization based adaptive robust control of a class of MIMO nonlinear systems with matched uncertainties and input/state constraints[J]. Automatica, 2014, 50(3): 864-873.
[10]MENDEL J M, JOHN R I, LIU Feilong. Interval type-2 fuzzy logic systems made simple[J]. IEEE transactions on fuzzy systems, 2006, 14(6): 808-821.
[11]LIANG Qilian, MENDEL J M. Interval type-2 fuzzy logic systems: theory and design[J]. IEEE transactions on fuzzy systems, 2000, 8(5): 535-550.
[12]YANG Fang, YUAN Ruyi, YI Jianqiang, et al. Direct adaptive type-2 fuzzy neural network control for a generic hypersonic flight vehicle[J]. Soft computing, 2013, 17(11): 2053-2064.
[13]WANG Qian, STENGEL R F. Robust nonlinear control of a hypersonic aircraft[J]. Journal of guidance, control, and dynamics, 2000, 23(4): 577-585.
[14]WANG Qian, STENGEL R F. Robust nonlinear flight control of a high-performance aircraft[J]. IEEE transactions on control systems technology, 2005, 13(1): 15-26.
[15]SUN Haibin, LI Shihua, SUN Changyin. Finite time integral sliding mode control of hypersonic vehicles[J]. Nonlinear dynamics, 2013, 73(1/2): 229-244.
[16]XU Haojian, MIRMIRANI M D, IOANNOU P A. Adaptive sliding mode control design for a hypersonic flight vehicle[J]. Journal of guidance, control, and dynamics, 2004, 27(5): 829-838.
Design of an adaptive robust controller for nonlinear system
JIAO Xin, JIANG Ju
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 200016, China)
Abstract:To address the problem of a nonlinear system with uncertain parameters, in this paper we propose a type-2 fuzzy-sliding-mode control method for designing an adaptive robust controller for nonlinear systems. We based the proposed method on the characteristics of type-2 fuzzy logic systems, which are especially adapted for solving uncertainty problems. For this novel method, we first precisely linearized the nonlinear model. Then, we designed a type-2 fuzzy logic system with selected appropriate sliding mode surfaces to overcome the uncertain parameters. To rapidly stabilize the system, we also designed adaptive laws by direct constructive Lyapunov analysis. A comparison of the simulation results indicates that the proposed control scheme can overcome uncertainties and better control the nonlinear system, thus making the whole system more adaptive and robust.
Keywords:adaptive robust controller; nonlinear system; uncertainty; type-2 fuzzy logic system; adaptivity; sliding mode control
中图分类号:TP273
文献标志码:A
文章编号:1006-7043(2016)03-402-06
doi:10.11990/jheu.201411020
作者简介:焦鑫(1986-),女,博士研究生;江驹(1963-),男,教授,博士生导师.通信作者:焦鑫,E-mail: jiaoxin_mengqu@163.com.
基金项目:国家自然科学基金资助项目(61304223);江苏省普通高校研究生科研创新基金资助项目(CXZZ13_0170);南京航空航天大学校博士学位论文创新与创优基金资助项目(BCXJ13-06).
收稿日期:2014-11-10.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20151224.1405.002.html
网络出版日期:2015-12-24.
猜你喜欢
法律方法(2022年2期)2022-10-20
中国化肥信息(2022年5期)2022-08-30
北京航空航天大学学报(2020年10期)2020-11-14
科学(2020年6期)2020-02-06
英语文摘(2019年6期)2019-09-18
中国外汇(2019年7期)2019-07-13
玩具世界(2019年6期)2019-05-21
北京航空航天大学学报(2017年1期)2017-11-24
北京航空航天大学学报(2016年7期)2016-11-16
系统工程与电子技术(2016年4期)2016-08-24