
欧洲“过渡试验飞行器”再入返回技术综述
2016-04-25 09:12:31魏昊功陆亚东李齐彭兢
航天器工程 2016年1期
魏昊功 陆亚东 李齐 彭兢
(北京空间飞行器总体设计部,北京 100094)
欧洲“过渡试验飞行器”再入返回技术综述
魏昊功 陆亚东 李齐 彭兢
(北京空间飞行器总体设计部,北京 100094)
欧洲“过渡试验飞行器”(IXV)是在欧洲未来运载器预备工程(FLPP)框架下研发的飞行试验器,主要用于演示验证升力体高超声速再入技术。2015年2月11日IXV成功回收,标志着欧洲在飞行器再入返回技术上实现了新的突破。文章介绍了IXV的发展历程、飞行试验情况,以及主要设计要求和技术指标,梳理了空气动力学、热防护系统(TPS)、制导导航与控制、回收等关键技术的解决途径,可为我国开展相关研究提供参考。
“过渡试验飞行器”;再入返回;高超声速
1 引言
2015年2月11日,欧洲“过渡试验飞行器”(Intermediate eXperimental Vehicle,IXV)成功完成了飞行试验,并在太平洋上安全溅落。欧洲航天局(ESA)局长将IXV任务称为一项“关键任务”,IXV任务主要是为了验证大气再入技术,此次试飞成功,标志着欧洲在飞行器再入返回技术上实现了新的突破。
在20世纪80年代法国赫尔墨斯(Hermes)、德国桑格尔(Sanger)等航天飞机项目相继因各种问题冻结后,欧洲对于再入领域的探索相当谨慎,直到1998年才实现了“大气再入验证器”(Atmospheric Re-entry Demonstrator,ARD)首次受控再入飞行,获得了用于再入技术研究的实际数据。此外,欧洲曾参与美国X-38空间站乘员返回飞行器项目,该项目在2002年被美国方面终止后,ESA决定自主研究再入技术。为保证技术和经济资源的有效利用,ESA制订了科学合理的发展规划,并启动了“未来运载器预备工程”(Future Launcher Preparatory Program,FLPP),包括一系列地面试验和飞行试验项目。在所有飞行试验项目中,IXV项目被认为是最具挑战性的,因此法国国家空间研究中心(CNES)与空中客车集团(Airbus Group)(原欧洲宇航防务集团,2014年初更名与业务重组)合作开展了作为IXV预先研究的Pre-X项目,用于探索可重复使用的热防护技术的可行性和研究高超声速气动热力学规律,以降低正式任务的风险。
IXV作为世界上第一个实现低轨再入的升力体返回飞行器,继承了ARD、Pre-X等项目的再入技术,兼具有翼升力式飞行器的可控性高和返回舱系统简单的优点。本文对IXV飞行试验、技术指标等进行了介绍,重点分析了气动外形设计与试验、热防护系统、制导导航与控制系统、下降与回收系统、测量系统等再入返回关键技术,可为后续研究提供参考。
2 IXV飞行试验简介
IXV完全继承了Pre-X的外形设计,如图1所示[1-2]。在2015年2月的飞行试验任务中,IXV从库鲁发射场由织女星(Vega)火箭发射进入赤道附近的亚轨道,在距地面高度为333km时与火箭分离后沿弹道自由飞行,到达远地点高度412km后下降,在到达再入点(距地面高度120km)时再入速度为7.5km/s,再入角为-1.2°[2]。飞行器再入过程中峰值过载达到2.02 gn,再入航程达到7300km,在末段速度的马赫数(Ma)为1.5和高度为26km的条件下触发下降与回收系统(Decent and Recover System,DRS),依次展开超声速减速伞、亚声速减速伞和主降落伞,最后在太平洋溅落并回收[3]。整个飞行过程持续时间1h40min。飞行过程如图2所示[4]。这是一次典型的近地返回任务,对后续研究有着重要的指导意义。

图1 Pre-X与IXV概念图Fig.1 Artist concepts of Pre-X and IXV

图2 IXV飞行过程Fig.2 IXV flight test
3 IXV主要设计要求与技术指标
IXV的主要设计要求为[1]:
(1)任务再入段试验马赫数(Ma)覆盖25~5;
(2)以标称弹道飞行时飞行器表面不得发生主动氧化继而扰乱边界层流动;
(3)回收飞行器,获得飞行期间的测量数据(任务成功判据);
(4)热防护系统的检查和拆卸不得对结构造成损伤;
(5)海上回收,且信标机能持续工作48h以上;
(6)与Vega火箭接口匹配;
(7)分离后可靠性0.95;
(8)安全指标为毁灭性事故发生概率1×10-7。IXV主要技术指标见表1所示[2-7]。

表1 主要技术参数Table 1 Main characteristics
4 IXV再入返回技术
4.1 气动外形设计与试验
前期欧洲研制的ARD采用类似于美国阿波罗飞船(Apollo)的气动外形,升阻比约为0.3,属于成熟外形。而IXV要求设计成升阻比不小于0.7的全新升力体外形,这给气动设计带来了重大挑战。
1)升力体外形设计与优化
升力体外形设计较Apollo飞船等轴对称旋成体的简单外形要复杂,与航天飞机、X-37B等有翼升力体外形也有所不同,属于全新的气动外形设计。设计时须要综合考虑各种目标函数(如升阻比高、阻力系数低、热流密度低等)、约束条件(如稳定性、容积利用率等)和设计变量(如最大包络、截面形状等)之间的关系。在IXV的气动外形设计过程中,利用相似性原理,综合航天飞机等成熟飞行器的设计特点开展设计优化,例如,采用了与航天飞机接近的头部直径尺寸,以降低表面热流密度。
如图3所示[1],设航天飞机的长度为lSTS,头部直径为dSTS。与此类似,设IXV的长度为lIXV,头部直径为dIXV,则IXV与作为参照的航天飞机的长度比例为,头部直径比例为。弹道因数定义为等比参照飞行器的密度ρref与缩比参照飞行器的密度ρx之比,其中下标ref表示等比,下标x表示缩比。3个主要的相似性参数见表2[1],此外还包括表征流体压缩性的马赫数(Ma)。从表2中可以看出,头部半径为主要相关因素,机身长度为次要因素。利用相似性原理,IXV的外形设计中头部直径与航天飞机相当,而长度仅为航天飞机的1/10,见表3[1]。

图3 航天飞机特征尺寸Fig.3 STS nose and length

表2 与航天飞机相似性参数Table 2 Similarity parameters with STS

表3 IXV与航天飞机尺寸对比Table 3 Length ratios of IXV and STS mm
相似性参数必须根据几何尺寸比例λ进行计算。假设缩比为1,试验飞行器马赫数相同,气动相似性参数条件λ/K=1,热流相似性参数条件(λK)0.5=1,则有以下关系:
气动


头部驻点热流密度

IXV在最大加热阶段的速度和高度与苏联暴风雪号航天飞机、美国航天飞机、苏联Bor-4升力体飞行器非常接近,如图4红色方框所示[1]。IXV高超声速下的配平攻角为45°,由于头部不是圆形,其等效半径必须根据攻角计算。由式(1),电离参数相同;根据式(2),由于IXV的λL<1,其雷诺数是航天飞机的1/10;又根据式(3),由于IXV的λD>1,K=1,因此其热流密度小于航天飞机。可见,在IXV的设计中,对于热流密度和气动热力学现象的考虑要多于气动力方面。

图4 IXV再入弹道与其它再入飞行器对比Fig.4 IXV re-entry path versus other re-entry vehicle path
2)尾襟翼流场干扰分析以及尾襟翼作动效果评估
IXV俯仰和滚转姿态调节,通过尾襟翼作动控制。但飞行器尾部的复杂流场与尾襟翼偏转导致的激波干扰相互作用[8],会对飞行器的静、动态气动力特性,特别是气动稳定性产生显著影响,此时尾襟翼的实际作动效果与理论预测值可能产生较大差异。为评估不同攻角和襟翼偏角组合下尾襟翼流场干扰对其作动效果的影响,德国宇航中心(DLR)使用高超声速风洞开展了大量风洞试验,分别研究了尾襟翼作为升降舵和作为副翼两个状态下的气动特性[8]。
3)真实气体效应对气动特性的影响研究
IXV再入过程中主要飞行速域为高超声速区,该区域真实气体效应明显,对于升力体这种较为复杂的飞行器外形影响显著。当年美国航天飞机实际飞行时为保证配平攻角40°,机身襟翼偏转了16°,而地面风洞试验预测只需7°即可实现。这一明显差异产生的原因,就是由于真实气体效应引起迎风面和背风面压力分布变化而产生抬头力矩的结果。由于风洞试验很难制造真实气体效应流动环境,因此真实气体效应对飞行器气动特性的影响研究只能通过理论计算和分析来开展,这对相关气体组分和反应模型的准确选择提出了很高的要求[9]。
4)风洞试验
IXV项目研究的一个主要目标,是建立飞行器气动力和气动热力学特性数据库,用于与飞行试验进行对比。为此专门开展了大量的计算流体力学(CFD)模拟和风洞试验工作,在马赫数从0.8到10.5范围内的跨声速、超声速和高超声速条件下进行了大量的气动力和气动热风洞试验[8,10]。
DLR使用高超声速风洞对IXV的气动特性进行了一系列试验研究。图5为用于风洞试验的模型[8]。试验数据表明,根据舵偏角与攻角的不同组合,尾舵附近的复杂流场对飞行器的气动力系数有着显著影响。DLR分别研究了尾舵作为升降舵和作为副翼两个状态下的气动特性。当尾舵作为升降舵工作时,左右舵偏角相同;作为副翼工作时,左右舵偏角不同。
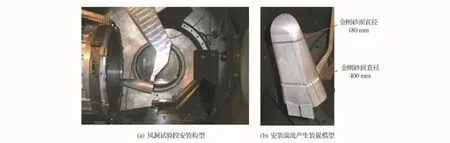
图5 用于风洞试验的模型Fig.5 Scaled model for wind tunnel tests
根据风洞试验结果,当尾舵作为副翼时,气动力系数随攻角基本呈线性变化,只有气动力矩系数在攻角大于45°时变化趋势不再单调。当尾舵作为升降舵时,气动力系数随攻角和舵偏角均呈单调变化。为进一步分析测量数据,采用纹影照相法显示了激波结构,如图6所示[8]。其中,α为飞行器攻角,δL/R为尾襟翼左/右舵偏角,ζ=α+δL/R为尾襟翼在流场中的攻角。
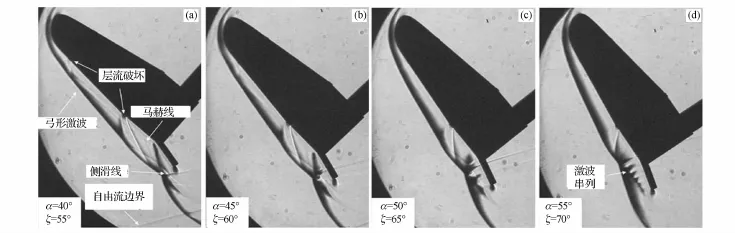
图6 纹影照相Fig.6 Schlieren images
研究还发现,当尾舵作为升降舵时,头部压力系数与马赫数和舵偏角无关;迎风面压力系数与马赫数有弱关联,随舵偏角单调变化;后部压力系数与舵偏角无关,与马赫数有关。图7显示了在尾舵和主体连接处的激波-激波干扰[8]。

图7 尾舵区激波结构Fig.7 Shock structure in flap region
研究发现在攻角和舵偏角组合大于60°的情况下,由于尾襟翼区域的复杂激波干扰对IXV的气动稳定性、控制和制导有十分不利的影响,因此在飞行中应尽量避免。此外,热流数据在流动拓扑结构方面对于解释气动力系数和表面压力分布有很大帮助。
IXV的风洞试验研究揭示了可能出现的复杂流场现象,对于设计、理解和掌握IXV的气动外形有着重要的参考价值。
4.2 热防护系统
热防护系统(TPS)设计的主要目标,是依靠改进的技术来实现创新的热防护设计和高性能的结构。热防护系统采用先进设计,可在质量最小的要求下承受恶劣的再入环境。IXV所承受的最大热流密度小于飞船,但总加热量大于飞船。不同于半弹道式飞船所采用的烧蚀型热防护,在IXV的头部、迎风面和尾襟翼使用了隔热型热防护,与航天飞机相似。
IXV再入过程中必须承受严酷的热环境。如图8所示[1],经过迭代设计,最终弹道的驻点热流峰值降至500kW/m2。为此,IXV的热防护系统采用了隔热材料和烧蚀材料结合的方式。如图9所示[1],端头、迎风面、翼前缘和襟翼采用陶瓷材料,除襟翼外,陶瓷蒙皮同内部隔热层组合,所形成的完整的组合体采用机械方式连接与固定,由下面的冷结构支撑;侧面、背风面和底部采用烧蚀复合材料,复合材料由硅树脂基材料制成,可抵御再入时的剪应力,此外,该材料还具有良好的烧蚀与隔热性能[11]。表4给出了热防护系统可承受的温度上限。
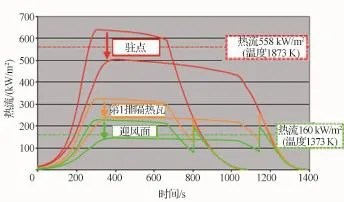
图8 热流随时间变化曲线Fig.8 Heat flux pattern
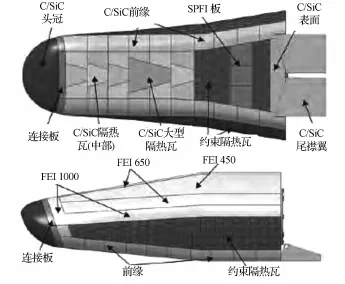
图9 热防护系统构造Fig.9 TPS architecture

表4 热防护系统温度上限Table 4 TPS upper limit
IXV的结构能够承受飞行阶段的全部载荷,包括发射和海中溅落期间所承受的载荷。它基于典型的框架/隔框和纵梁结构,以及支撑热防护系统的气动外壳板。为满足严格的质量标准要求,主舱壁和气动外壳采用碳纤维增强复合材料。
另外,为了避免N2H4肼推进剂超出+50℃温度而变得不稳定,每个反冲发动机(RCS)的喷口都加强了热防护,以保证在再入环境下的安全。为此,IXV上采用了数值模拟仿真分析方法设计相应的热防护系统。图10(a)为喷口的热流随时间变化曲线,每条曲线分别对应如图10(b)所示[12]喷口的B2-1,2,3,4,5位置。

图10 IXV推力器喷口热流分布Fig.10 Aero-thermal heat fluxes distribution of an IXV thruster
根据对推力器工作时间的分析,计算了IXV的工作环境。根据计算结果,优化了如图11(a)的热防护结构,增加了额外的隔热板(图中浅蓝色底板),优化后的仿真结果如图11(b)所示[12]。与优化前计算结果比较,推力器喷口的最高温度由超过200℃降低至160℃,得到明显改善。

图11 增加隔热板的设计优化结果Fig.11 Additional insulation cover on bulkhead as optimal design solution
4.3 制导导航与控制系统
IXV的制导导航与控制系统组成如图12所示[5-6],飞行管理(Flight Management)处于顶层,保证GNC状态信息更新。任务与飞行器管理(Mission and Vehicle Management,MVM)利用该状态监控子系统。此外,结合该状态和MVM的输出指令可以监控IXV的飞行状态[5]。
制导系统工作频率为2Hz,用于保持姿态、控制热流和气动力在安全范围内,避免热防护系统被主动氧化,保证飞行器沿预定路径飞往指定地点。制导系统分为轨道和再入两部分。轨道制导部分包含一个预先存储的姿态四元数参照表,用于保证全球定位系统(GPS)的天线指向北方。再入制导部分控制攻角和侧滑角两个变量,保证飞行器时刻处于再入走廊内。再入制导基于以下3个功能[5-6]。
(1)弹道生成:首先在轨生成一条能量最优弹道。随后,为消除开伞误差,机上计算机实时修正标称弹道。
(2)弹道跟踪:将轴向、法向运动与侧向运动解耦,采用完全解析公式保证收敛和降低机上计算机负担。控制输出量为倾侧角指令。攻角指令经过调制,能够减小倾侧角反转和其它瞬时扰动。控制同时保证侧滑角在配平位置。
(3)开伞前制导:保证进入弹道末段的姿态角符合开伞条件,提供直接指令控制。
导航系统工作频率为2Hz,包含惯性测量、GPS更新,以及在黑障区利用阻力推导高度数据(Drag Derived Altitude,DDA),并为制导系统和控制系统提供气动数据。导航系统在2Hz计算导航结果,如惯性系位置和速度矢量,以及一系列导航参数,输入基于惯性测量单元(IMU)和GPS接收机。
导航策略如下[5-6,13]。
(1)自动对准:导航在发射前由IMU自动对准。
(2)惯性导航:在上升、再入和下降段,导航利用IMU和GPS数据计算各种导航参数。
(3)自由弹道导航:在轨期间,忽略除重力之外的其它外力。
(4)GPS更新:标称弹道包含3个GPS数据更新点,分别为:IXV分离点、进入大气前和飞出黑障后,用于校正误差。
控制系统工作频率为20Hz,控制执行机构实现姿态控制。执行机构为安装在尾部的2个尾舵和4个400N推力的RCS。尾襟翼在气动力显著作用时开始工作,使IXV在大气层内的机动能力显著提升[5-6]。
尾襟翼设计是IXV的一大亮点,如图13所示[1]。由于采用升力体气动外形设计,IXV的升阻比0.7大于Apollo飞船的0.3,加上采用了反冲发动机和气动襟翼混合控制姿态,升力指向调整更加灵活,使得IXV的机动性远大于半弹道式的飞船。由于在马赫数5以上的高超声速区,气动襟翼面控制效率低,因此IXV的尾襟翼比普通飞机的气动舵面积大得多,能以15(°)/s(最大30(°)/s)的角速率在-19°~+21°舵偏范围内变化[9],最大铰链力矩1450Nm。
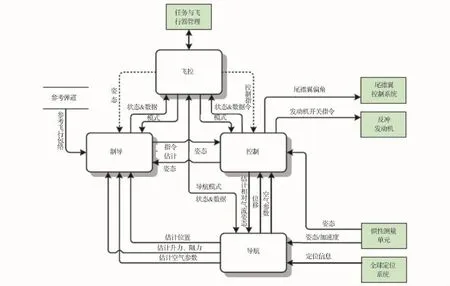
图12 GNC功能架构Fig.12 GNC functional architecture
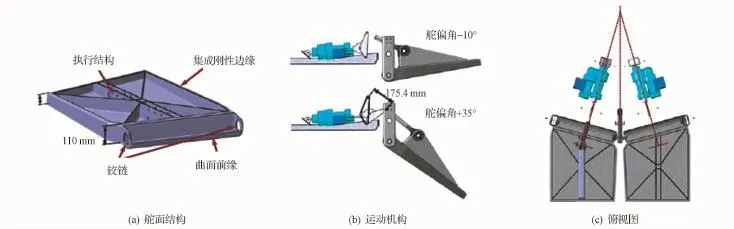
图13 尾襟翼构型Fig.13 Body flaps configuration
4.4 下降与回收系统
下降与回收系统(Descent and Recovery System,DRS)由降落伞、漂浮气囊和信标机组成。IXV本身不透气并可以漂浮,但为保证回收成功,还是增加了漂浮气囊,如图14所示[14]。DRS从超声速开伞时刻开始工作,此时IXV处于无控的开环状态。
IXV的飞行轨迹避开了人口稠密区域,并在太平洋无人区溅落。当IXV达到马赫数1.6、高度26km时,超声速减速伞打开,IXV降低飞行速度,同时保证穿过跨声速区时姿态稳定。随后,当马赫数0.3,高度10km时,亚声速减速伞第1次打开。最后,在飞行高度到达3.2km时,主降落伞打开,将IXV的着海速度降至6m/s。主伞打开后,气囊充气准备海上溅落。溅落后,信标机开机工作,等待回收[7]。

图14 DRS漂浮气囊Fig.14 DRS floatation subsystem
4.5 测量系统
IXV的主要目的是通过飞行试验验证自主再入所需的气动、气动热和热防护系统方面的技术,为此IXV上安装了约300个传感器采集有价值的数据,用以验证和改进上述技术[15]。通过合理选取传感器的类型和安装位置,使得采集的数据量最大,同时最小化系统集成的复杂度。IXV头部安装了20个热电偶和9个压力传感器,用于采集攻角、驻点压强和C-SiC陶瓷的热梯度。位移传感器和高温应变计记录机械负载,并测量头冠和机身碳基复合结构的膨胀差异。同样的传感器组合也被用于迎风面的热防护系统。在其中一个热防护瓦上安装了有防护涂层的器件,用于测量再入环境中陶瓷材料的催化效应程度。IXV机身的背风面、侧面和底面覆盖了烧蚀型材料,这些材料的实际表现需要使用专门设计的热电偶测量系统衡量。在机身后部的尾襟翼和铰链盒也安装了热电偶。此外,通过探出机身后部的潜望镜形的蓝宝石镜光学组件,红外相机能够生成尾襟翼的热成像。成像经过压缩,储存在数据处理单元。数据处理单元对其进行分析,并据此调整相机的视场。
气动和气动热试验包括以下内容[15]:①尾襟翼效率及其热力学特性;②激波/激波相互作用;③激波/边界层相互作用;④湍流加热;⑤层流到湍流转捩;⑥飞行器后部气动和气动热特性;⑦稀薄和连续空气动力学;⑧RCS效率;⑨材料催化效应;⑩孔洞加热;瑏瑡真实气体效应。
TPS试验目的包括验证再入环境下TPS的隔热能力和热机性能。TPS包含C-SiC头冠和迎风面隔热瓦,背风面、侧面和后部的烧蚀型热防护,以及C-SiC铰链盒和尾襟翼。
图15为传感器分布[15]:(a)为测量层流到湍流转捩的传感器;(b)为测量材料催化效应的传感器;(c)为测量激波/边界层相互作用的传感器;(d)为测量飞行器加热的传感器;(e)为气流数据系统的传感器;(f)为测量飞行器后部气动和气动热特性的传感器和相机。
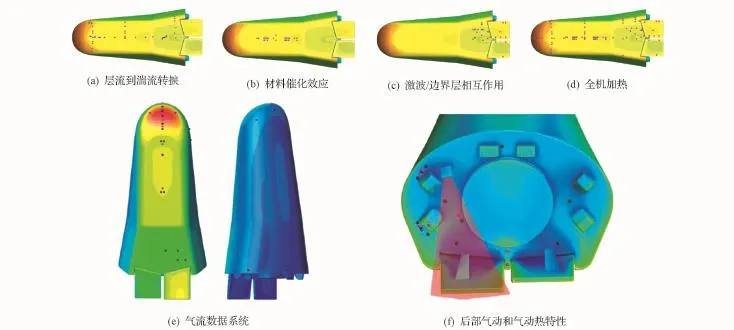
图15 IXV传感器分布Fig.15 Sensors for IXV experiments
5 结束语
IXV作为欧洲第一个升力体再入返回飞行试验器,既充分利用了ARD项目已掌握的技术,又采用了大量新材料和新技术。这次飞行试验所获得的宝贵的真实高空再入环境数据,将用于系统工程、气动热力学、导航制导与控制、热防护系统等多个领域的技术验证。2012年11月,ESA决定将新型空间飞行器(Innovative Space Vehicle,ISV)作为IXV的后继项目[16],目标是发展一种经济可承受的、可重复使用的无人小型轨道器,具备多用途货运舱,可以携带若干模块化载荷以满足多种任务需求[5]。IXV项目中获取的数据和掌握的技术将为ISV的研制提供有力支撑。
IXV是欧洲掌握再入返回技术的关键。欧洲对于再入返回飞行器的研究起步较晚,但是通过科学规划,ESA制定了一条高效的发展路线,在技术上重视积累,合理规划,循序渐进,确保了欧洲再入返回飞行器领域研究的快速发展。同时,虽然欧洲的发展路线单一,但在技术上的跨度却很大,这得益于其有预见性的FLPP、完善的科研环境和试验设施,以及政府、企业和大学之间的紧密合作。
欧洲发展再入返回飞行器的过程为我国发展升力体再入返回飞行器提供了宝贵借鉴。首先,制订科学的发展规划,并根据发展规划细化相应技术发展途径,而不能仅以孤立的型号项目作为牵引,这样才能实现系统优化和降低成本。其次,充分利用飞行试验器进行各种飞行试验,而不是简单地验证设计方案是否可行。欧洲通过IXV获得了大量飞行数据和设计经验,大幅提高了后续型号的研制能力。为此,应该重视基础研究,增加政府与企业、大学之间的合作,加大基础设施建设投入,积累地面试验数据和经验。
(References)
[1]Baiocco P.Pre-X experimental re-entry lifting body:design of flight test experiments for critical aerothermal phenomena[C]//Flight Experiments for Hypersonic Vehicle Development.Neuilly-sur-Seine,France:RTO,2007
[2]ESA.IXV factsheet[EB/OL].[2015-03-05].http://esamultimedia.esa.int/docs/launchers/IXV_facesheet20150123.pdf
[3]Haya R,Bonetti D,Serna J,et al.Validation of the IXV mission analysis and flight mechanics design[C]//18th AIAA/3AF International Space Planes and Hypersonic Systems and Technologies Conference.Washington D.C.:AIAA,2012
[4]ESA.IXV flight profile[EB/OL].[2015-03-05].http://www.esa.int/spaceinimages/Images/2015/02/IXV_flight_profile
[5]Malucchi G,Zaccagnino E,Drocco A,et al.The European re-entry program,from IXV to ISV:GNC avionics development status and challenges[C]//AIAA Guid-ance,Navigation,and Control(GNC)Conference.Washington D.C.:AIAA,2013
[6]Zaccagnino E,Malucchi G,Marco V,et al.Intermediate eXperimental Vehicle(IXV),the ESA re-entry demonstrator[C]//AIAA Guidance,Navigation,and Control Conference.Washington D.C.:AIAA,2011
[7]Kerr M,Haya R,Peín L F,et al.IXV Re-entry guidance,control &DRS triggering:algorithm design and assessment[C]//AIAA Guidance,Navigation,and Control Conference.Washington D.C.:AIAA,2012
[8]Gawehn T,Neeb D,Tarfeld F,et al.Experimental investigation of the influence of the flow structure on the aerodynamic coefficients of the IXV vehicle[J].Springer,Shock Waves,2011,21:253-266
[9]Romere P,Whitnah A.Space shuttle entry longitudinal aerodynamic comparisons of flight 1-4with preflight predictions,NASA-CP-2283[R].Washington D.C.:NASA,1983
[10]Pezzella G,Marino G,Rufolo G,Aerodynamic database development of the ESA intermediate experimental vehicle[J].Acta Astronautica,2014:57-72
[11]Loddoni G,Signorelli M,Antonacci M.IXV adaptation to vehicle reconfiguration[C]//40th International Conference on Environmental Systems.Washington D.C.:AIAA,2010
[12]Loddoni G,Bertone M,Andrioli L,et al.Thermal control for IXV propulsion system[C]//42nd International Conference on Environmental Systems.Washington D.C.:AIAA,2012
[13]Belin S,Breazu A.Navigation architecture of IXV for direct and skip atmospheric re-entries[C]//Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing(NAVITEC).New York:IEEE,2010
[14]Chavagnac C,Moulin J,Gerard Y,et al.Pre-X:a first European hypersonic glider[C]//12th AIAA International Space Planes and Hypersonic Systems and Technologies.Washington D.C.:AIAA,2003
[15]Rufolo G C,Camarri F,Pereira C,et al.ESA Intermediate eXperimental Vehicle in-flight experimentation,objectives,experiment implementation,qualification and integration[C]//65th International Astronautical Congress.Toronto:IAC,2014
[16]ESA.Frequently asked questions on IXV[EB/OL].[2015-03-05].http://www.esa.int/Our_Activities/Launchers/IXV/Frequently_asked_questions_on_IXV
(编辑:李多)
Reentry Technique Analysis of European IXV
WEI Haogong LU Yadong LI Qi PENG Jing
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Intermediate eXperimental Vehicle(IXV)is an ESA flight test platform to demonstrate lifting body hypersonic reentry capabilities in the frame of Future Launch Preparatory Program(FLPP).The flight test mission completed on February 11th2015,which validated the European reentry system.This article presents the development of IXV and the performance of the flight test,focusing on the IXV design and reentry technology including aerodynamics,thermal protection system(TPS),GNC,and recovery system.The research and development of IXV can offer reference for Chinese counterparts.
IXV;reentry;hypersonic
V417
:ADOI:10.3969/j.issn.1673-8748.2016.01.018
2015-08-18;
:2015-11-05
魏昊功,男,助理工程师,从事航天器总体设计工作。Email:weihaogong@aliyun.com。
猜你喜欢
军事文摘(2023年12期)2023-06-12 07:52:00
趣味(数学)(2021年12期)2021-04-19 13:43:42
民用飞机设计与研究(2020年4期)2021-01-21 09:15:16
宇航总体技术(2019年5期)2019-10-11 07:32:56
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
中国科技博览(2017年10期)2017-05-25 05:38:56
科技尚品(2016年6期)2016-07-06 08:54:13
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
振动与冲击(2015年2期)2015-05-16 05:37:34
空气动力学学报(2015年3期)2015-04-14 08:42:40
