
全球高分光学星概述(二):欧洲
2016-04-25 09:12:21朱仁璋丛云天3王鸿芳邱慧3白照广
航天器工程 2016年1期
朱仁璋丛云天,3王鸿芳邱慧,3白照广
(1北京航空航天大学,北京 100191)(2航天东方红卫星有限公司,北京 100094)(3中国空间技术研究院,北京 100094)
全球高分光学星概述(二):欧洲
朱仁璋1丛云天1,3王鸿芳2邱慧1,3白照广2
(1北京航空航天大学,北京 100191)(2航天东方红卫星有限公司,北京 100094)(3中国空间技术研究院,北京 100094)
欧洲高分光学星及其星座主要以欧洲航天局(ESA)和法国、英国、德国、西班牙、意大利等国家研制的卫星为主。法国牵头的军事卫星太阳神-2(Helios-2)地面分辨率(全色)为0.35m;商业遥感卫星主要有法国的SPOT-6/7和昴宿星(Pleiades)星座(分辨率0.5m)以及英国主导的灾害监测星座(DMC)(分辨率可达1m)。亚米级彩色视频成像小卫星正在研制之中。6U立方星星座及米级地球静止轨道光学星等新概念已被提出。地球静止轨道光学星由ESA牵头,应用传统相机地面分辨率可达3m,而未来的概念(光学合成孔径)可使分辨率优于3m。文章着重阐述欧洲地球观测高分光学星的应用、技术状态与发展趋势。
欧洲卫星;高分辨率;光学卫星
1 引言
欧洲高分光学星以ESA(Europe Space Agency,欧洲航天局)和法国、英国、德国、西班牙以及意大利等国家研制的卫星为主,为资源探测、陆地测绘、海洋海事、环境减灾、军事侦察、导弹预警等提供高分辨率图像和数据。欧洲军用光学星以法国等多国合作的Helios系列卫星为主。商业遥感卫星以法国SPOT-6/7和Pleiades星座以及英国主导的DMC为代表。亚米级彩色视频成像小卫星正在研制之中。6U立方星星座及米级地球静止轨道光学星等新概念已被提出。地球静止光学星由ESA牵头,采用传统相机可获得的地面分辨率最高为3m,而采用光学合成孔径技术分辨率可优于3m。
2 法国
2.1 Helios与CSO
2.1.1 Helios
军用光学侦察系统Helios项目于1995年开始应用,由法国国防部采买局负责,保持对地面部分管理的直接控制,并委托法国国家航天研究中心(Centre National d’Etudes Spatiales,CNES)负责空间部分。
(1)Helios-1。Helios-1为法国、意大利和西班牙的合作项目,由地面部分(包含测控站以及位于法国、意大利和西班牙的图像接收中心)和空间部分(Helios-1A/1B)组成。Helios-1A/1B分别于1995年7月7日和1999年12月3日由阿里安-4(Ariane-4)火箭发射,进入高度680km、倾角98.1°的近圆太阳同步轨道。2004年10月,Helios-1B供电系统出现故障导致任务终止。2012年1月,Helios-1A使命终结,并于同年2月再入地球大气。[1-2]Helios-1卫星设计特点:①采用SPOT-Mk.2平台,卫星发射质量为2537kg,设计寿命5年;②地面分辨率为1m、幅宽为10km;③姿态测定采用星敏感器;④星上侧摆系统(程序控制、应用动量轮)可使卫星指向偏离星下点400km;⑤通过转动一面反射镜,卫星可横向成像;⑥星座重访周期可达1天。Helios-1卫星示意图见图1。[2]
(2)Helios-2。Helios-2为法国、比利时、西班牙和希腊的合作项目,由专用地面部分(法国控制中心以及位于法国、比利时和希腊的地面站)和空间部分(Helios-2A/2B)组成,主承包商为Airbus Defence and Space。Helios-2A/2B分别于2004年12月18日和2009年12月18日由Ariane-5火箭发射,进入高度约700km的太阳同步轨道,在轨相位成180°,至2015年两颗卫星仍在轨运行。[3-4]相比Helios-1,Helios-2卫星性能改进:①改用SPOTMk.3平台,卫星发射质量增大至4200kg;②载有泰雷兹-阿莱尼亚空间公司(Thales-Alenia Space)研制的高分辨率相机,质量为1124kg,地面分辨率为0.35m;③载有用于制图的宽视场相机和用于夜间监测的红外系统;④重访周期缩短。Helios-2卫星示意图见图2。[5]
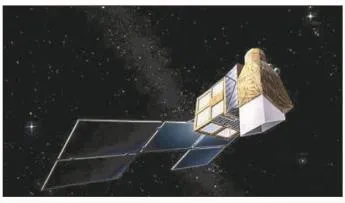
图1 Helios-1卫星概念图Fig.1 Helios-1artist’s concept

图2 Helios-2卫星概念图Fig.2 Helios-2artist’s concept
2.1.2 CSO
2010年12月,欧洲提出替代Helios-2系统的空间光学部分(Composante Spatiale Optique,CSO)计划,第一颗星预计于2016年发射。主承包商Airbus Defence and Space负责卫星平台与电子仪器设备的研制以及整星的总装、测试和转运。Thales-Alenia Space提供甚高分辨率光学相机。卫星将配备新一代力矩陀螺、光纤陀螺、星载电子和控制软件,优化卫星质量与惯量,提高卫星侧摆速度。卫星还将配备Airbus Defence and Space研制的伽利略导航系统。[6]CSO卫星示意图见图3。[7]
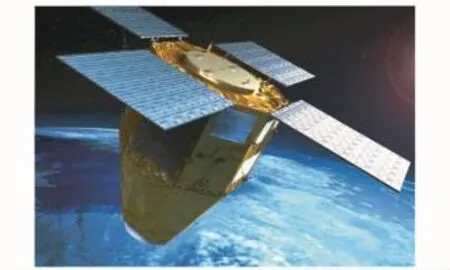
图3 CSO卫星概念图Fig.3 CSO artist’s concept
2.2 SPOT
SPOT(Système Pour l'Observation de la Terre,Satellite for Observation of Earth)是欧洲第一个地球观测卫星项目,于1977年由CNES提出,用于探测地球资源,观测人类活动,监测和预测气候变化、海洋活动等自然现象。SPOT可分为两个阶段:①SPOT-1/2/3/4/5(1986—2015年);②SPOT-6/7(2012年至今)。
2.2.1 SPOT-1/2/3/4/5
(1)概述。SPOT-1/2/3/4/5于1986-2002年期间发射,地面分辨率由10m(SPOT-1/2/3/4)提高至2.5m(SPOT-5)。五颗星均进入高822km的太阳同步轨道,星座重访周期为1天。[8-9]卫星发射质量分别为1800kg(SPOT-1/2/3)、2760kg(SPOT-4)和3000kg(SPOT-5),卫星构型对比见图4。[10]

图4 SPOT-1/2/3/4/5卫星构型对比Fig.4 Comparison among SPOT satellites
(2)SPOT-5。2002年5月3日,SPOT-5成功发射,在轨实现双重目标,即确保地球观测服务持续性与提升数据和图像品质,以满足市场需求。[10]2015年3月27日,SPOT-5完成使命,进入最终运行阶段。SPOT-5载有Astrium SAS研制的两台高分辨率几何成像相机(High Resolution Geometric,HRG),一台高分辨率立体成像相机(High Resolution Stereoscopic,HRS)和一台植被探测仪(Vegetation)。基于HRG的成像模式,SPOT-5地面采样距离(GSD)为2.5m,单台相机幅宽为60km。HRS相机的两个望远镜在卫星上沿轨迹方向倾斜安装,分别为前视20°和后视20°,同时拍摄卫星星下点前后的全色图像(幅宽120km),并可实现立体观测。[11]卫星定位精度(无地面控制点)均方根值优于50m。[12]SPOT-5星上仪器分布与结构见图5,HRG相机结构见图6,SPOT-5卫星于2011年拍摄的丹麦哥本哈根影像见图7。[11-13]

图5 SPOT-5星上仪器分布与结构示意图Fig.5 Schematic view of the SPOT-5instruments and its structure

图6 高分辨率几何成像相机结构Fig.6 HRG instrument architecture

图7 SPOT-5拍摄的哥本哈根影像Fig.7 Copenhagen image of SPOT-5
2.2.2 SPOT-6/7
2012年9月9日,Airbus Defence and Space研制的SPOT-6由印度极轨卫星运载火箭(PSLV)发射。2014年6月30日,SPOT-7由同型火箭发射。[14-15]SPOT-6/7加入Pleiades星座,并与Pleiades-1A/1B协同观测:①SPOT-6/7以1.5m的地面分辨率(全色)覆盖较广的区域;②Pleiades-1A/1B对目标区域以亚米级地面分辨率(全色)进行详查。四颗星组成的星座构型见图8。[16]
SPOT-6/7卫星采用的AstroSat-250(Astro-Bus-L)平台,是中国台湾福卫-2(FormoSat-2)采用的平台Leostar 500XO(Astrium SAS设计)的改进版。SPOT-6/7卫星所载光学相机均为NAOMI(New AstroSat Optical Modular Instrument),由Astrium SAS公司设计制造。
SPOT-6/7卫星性能参数和相机性能指标分别见表1和表2。[16]SPOT-6/7卫星展开示意图见图9,NAOMI相机结构和光学系统见图10,SPOT-7拍摄的澳大利亚悉尼见图11。[15-16]

图8 Pleiades-1A/1B和SPOT-6/7星座构型Fig.8 The Pleiades-1A/1Band SPOT-6/7 constellation configuration

表1 SPOT-6/7卫星性能参数Table 1 Performance parameters of SPOT-6/7
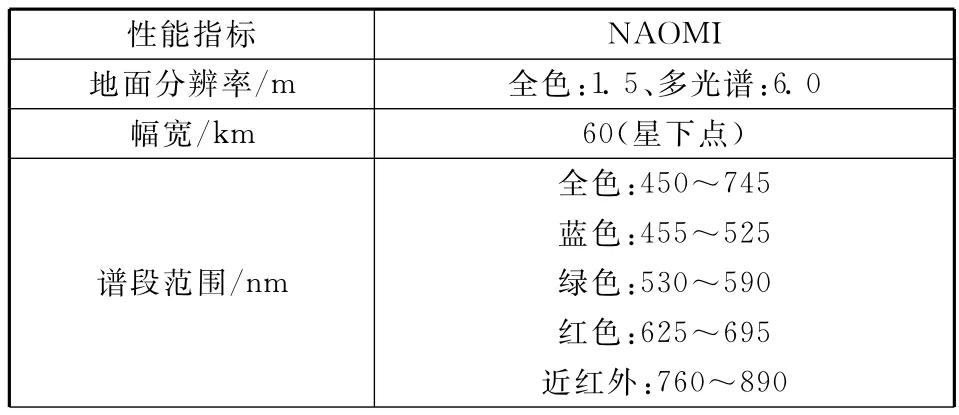
表2 相机NAOMI性能指标Table 2 Specification of the NAOMI instrument

续 表

图9 SPOT-6/7卫星展开示意图Fig.9 Artist’s schematic of the deployed SPOT-6/7spacecraft

图10 NAOMI相机结构及光学系统Fig.10 Illustration of the optical system of the NAOMI telescope
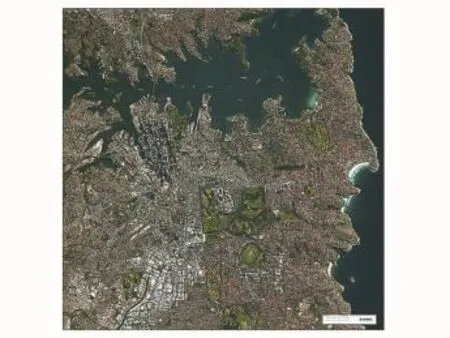
图11 SPOT-7拍摄的悉尼影像Fig.11 Sydney image of SPOT-7
2.3 Pleiades星座
Pleiades为CNES高分光学成像星座(High-Resolution Optical Imaging Constellation of CNES),包含Pleiades-1A/1B两颗卫星。Pleiades-1A于2011年12月16日发射,Pleiades-1B于2012年12月2日发射,两星相位成180°分布在相同轨道上。Pleiades星座用于大面积区域测绘,以及矿业、工业、军事区域及自然灾害的监测等。[17-18]Pleiades-1A/1B由Airbus Defence and Space研制,采用AstroSat-1000平台,地面采样距离(全色)为0.5m。Pleiades卫星的特点是卫星快速机动与稳定控制能力以及高性能相机。
2.3.1 姿态测定与控制
Pleiades卫星采用三轴稳定控制方法,姿态敏感器采用“星敏感器+陀螺”,姿态控制器件采用4个控制力矩陀螺。
卫星姿态测定采用Sodern公司的SED36型星敏感器(3台)和Ixsea公司的Astrix 200型高精度光纤陀螺。SED36型星敏感器的测量精度为垂直光轴方向1″~2.6″,沿光轴方向6″~17″,数据率8Hz。SED36型在SED26型的基础上进行优化设计,减少热耦合效应及热不稳定性(减小低频误差),降低光学畸变误差,更新星库和增加导航星的数目。[19]
卫星姿态控制采用单框架控制力矩陀螺CMG 15-45S。针对1t左右、高精度指向的卫星,通过陀螺综合优化设计(包括质量、体积、结构、功耗、转子平衡、陀螺力矩补偿、框架误差和转子大小等),实现单个转子角动量为15N·m·s,最大框架角速率为3rad/s,最大峰值输出力矩为45Nm,平均最大力矩为20Nm的性能。
2.3.2 高分辨率相机
Pleiades-1A/1B所载高分辨率成像仪(High-Resolution Imager,HiRI)由CNES和Thales-Alenia Space共同研制。相机采用Korsch型望远镜,次镜位于主镜光轴上,要求主镜和次镜的支撑结构具有良好的热稳定性,否则易发生失焦,造成波前误差(WaveFront Error,WFE)。反射镜支撑结构采用碳/碳复合材料,其特点为:①准各向同性结构中热膨胀系数趋近于零;②良好的机械特性,密度小;③对水汽不敏感;④适用于不同的结构;⑤技术较为成熟;⑥成本较低。
相机反射镜采用轻量化Zerodur微晶玻璃,配合一体化的殷钢反射镜固定装置(Mirror Fixation Device,MFD),使得光学系统达到较高性能。通过采用底切等技术,主镜、次镜和第三镜的质量分别减少78%、56%和75%,同时保证各级反射镜波前误差在一定范围内。[20]MFD用于消除反射镜和安装面之间由于平面误差及不同材料的热膨胀系数差异产生的耦合,使光学表面不变形,并将反射面与支撑结构之间的动力学耦合带来的风险控制在可接受的范围。殷钢使用电蚀加工,在一定温度范围内热膨胀系数低,保证镜面与支撑机构之间的热膨胀差在规定的范围内。反射镜使用计算机辅助干涉测量技术,保证各反射镜的几何安装误差不大于12nm。
成像敏感器采用TDI CCD,最大积分行数为20。[21]在敏感器窗口内的底板上集成四个条状滤光片,使得所有的谱段在视场角内分开,减少成像色差。[22]Pleiades-1B卫星GSD为0.5m,像元尺寸为13μm。分辨率的提高是由于采用了亚像元拼接技术,即对同一目标沿轨迹方向相距1/2像元和沿横向相距1/2像元进行成像。通过减小像元中心间距,进行数据处理和图像融合。
2.3.3 卫星及相机参数
Pleiades-1A/1B卫星参数和空间相机性能指标分别见表3和表4。[23]Pleiades-1A/1B卫星结构见图12,Pleiades卫星星敏感器、光纤陀螺、控制力矩陀螺见图13。[23]HiRI相机结构、望远镜光学系统与分光原理见图14。[22-24]Pleiades-1B卫星拍摄的北京紫禁城全色(0.5m)卫星影像见图15。[25]
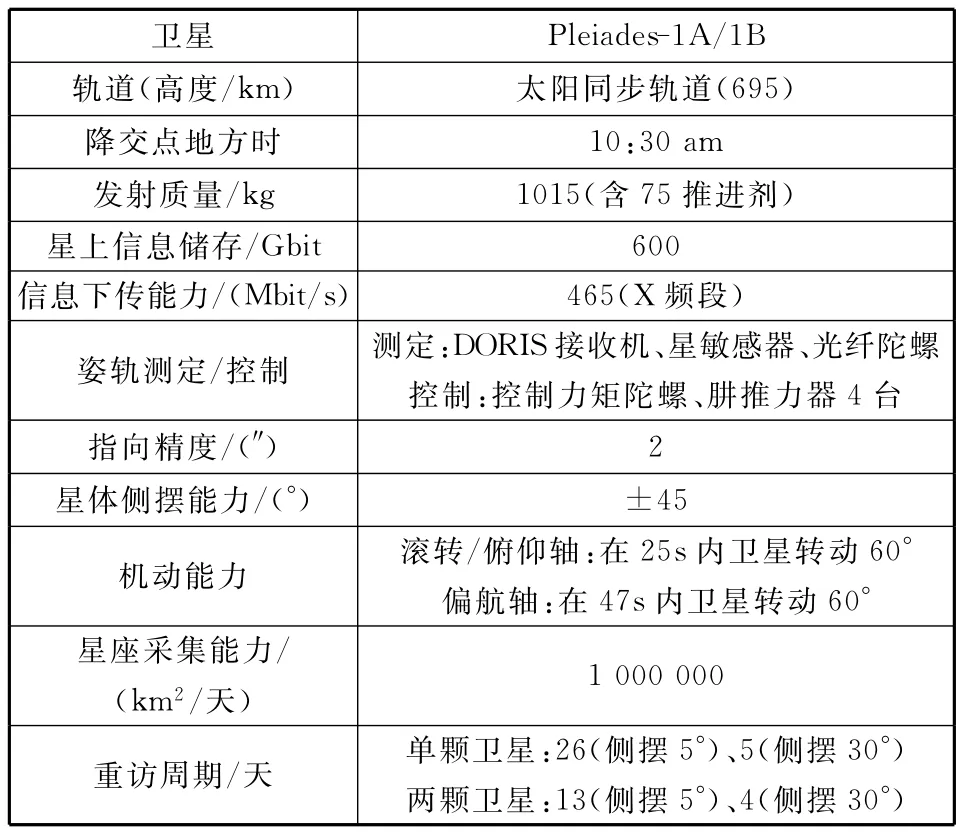
表3 Pleiades-1A/1B卫星参数Table 3 Performance parameters of Pleiades-1A/1B
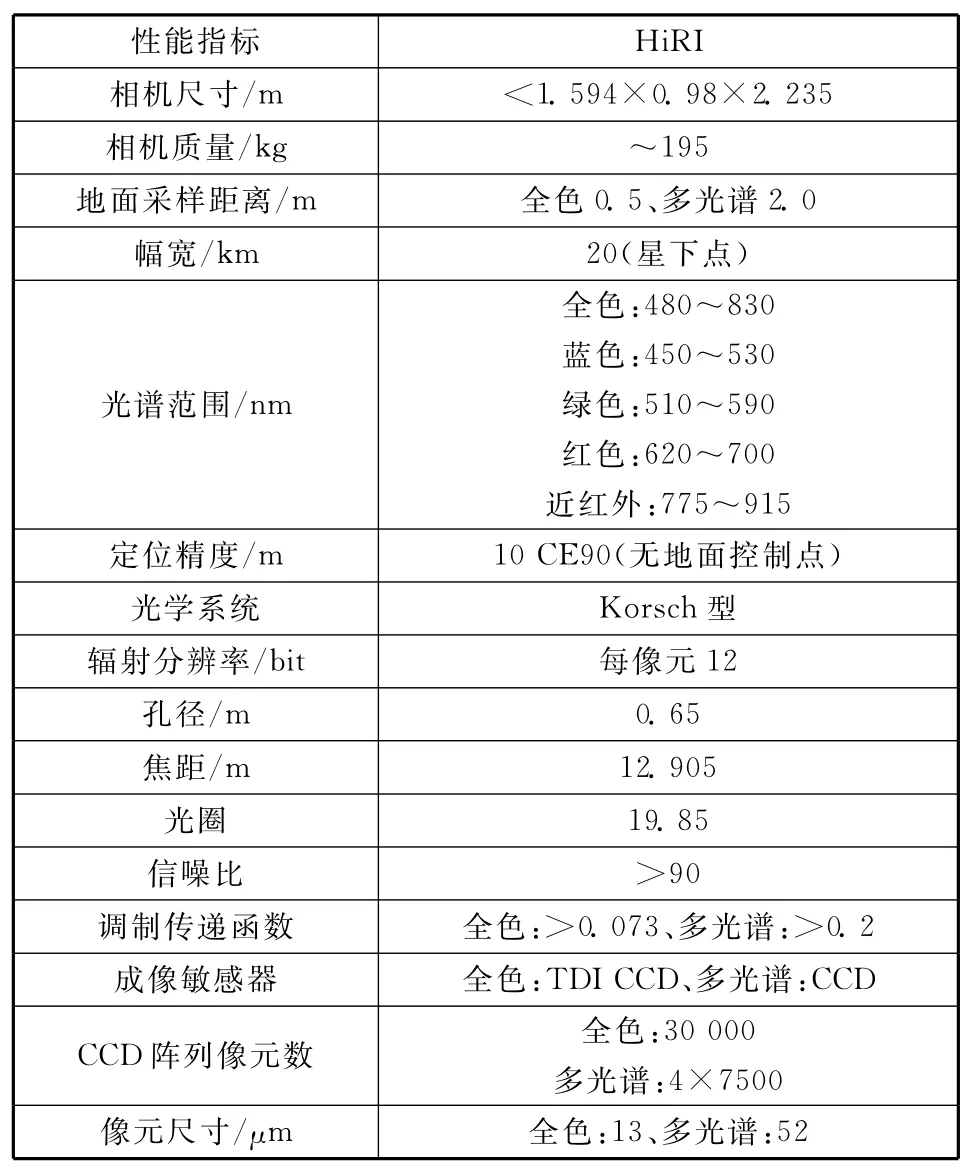
表4 HiRI性能指标Table 4 Characteristics of the HiRI instrument
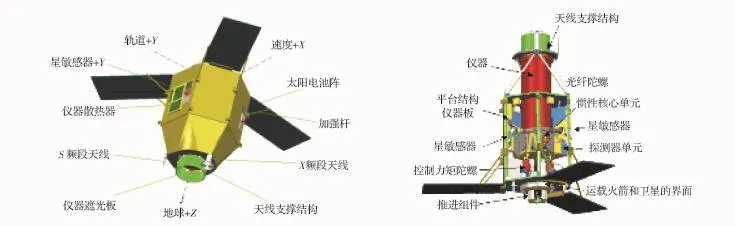
图12 Pleiades卫星外部和内部结构Fig.12 Schematic layout of the Pleiades exterior and interior structure
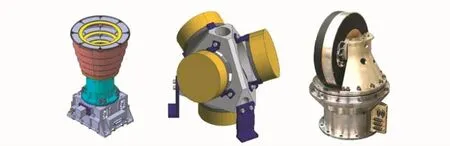
图13 Pleiades卫星星敏感器(左)、光纤陀螺(中)、控制力矩陀螺(右)示意图Fig.13 Illustration of the star sensor,optic fiber gyroscope and CMG actuator
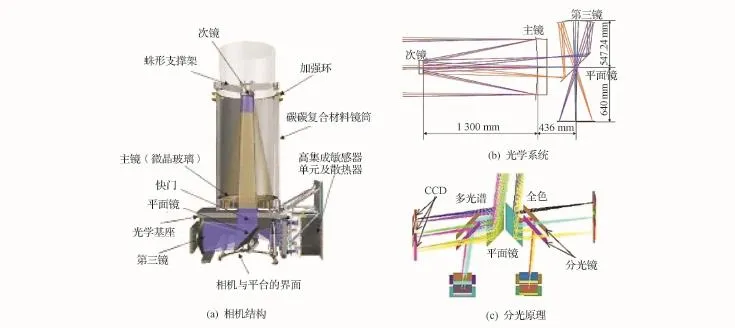
图14 HiRI相机结构、望远镜光学系统与分光原理Fig.14 HiRI instrument construction,optical system and splitting principle
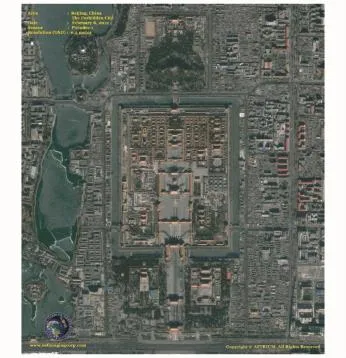
图15 Pleiades-1B卫星拍摄的北京紫禁城卫星影像Fig.15 Beijing Forbidden City image of Pleiades-1B
2.4 OTOS演示项目
超高分辨率光学地球观测OTOS(Observation de la Terre Optique Super-Résolue,Super-Resolution Optical Earth Observation)是CNES于2012年提出的演示项目,旨在研发应用于下一代高分辨率地球观测卫星的新技术。OTOS卫星预计于2020—2022年期间发射,轨道为高700km的太阳同步轨道,地面分辨率为全色0.3m、多光谱(4~6谱段)1.2m,幅宽为15~18km。OTOS项目在Pleiades卫星基础上对望远镜和成像敏感器进行改进。[24]
2.4.1 望远镜
OTOS将卫星致密性作为重要的设计要求,主要通过望远镜的致密性实现。综合比较光圈数相同的TMA型、反射/折射组合型和Korsch型望远镜的致密性和光学性能后认为:Korsch型望远镜更适合OTOS高分光学星。[26]此外,Boostec和Airbus Defence and Space正致力于研制用于OTOS的新型超轻质反射镜,主镜采用碳化硅制成,直径为1.5m。[27]
2.4.2 成像敏感器
OTOS计划研制下一代CCD和CMOS成像敏感器,包括前置模拟电路和模数转换器的更新。在设计时考虑以下性能:①读出速度;②低光照下信噪比(SNR);③抗晕光性能;④几何稳定性;⑤调制传递函数(MTF);⑥视线稳定性。高分辨率全色通道敏感器仍采用TDI CCD,多光谱通道敏感器在新型CCD和CMOS中选择。[24]
3 英国
英国光学卫星以萨瑞卫星技术有限公司(Surrey Satellite Technology,SSTL)研制的小型卫星为主,主要包括灾害监测星座(DMC)系列卫星。此外,采用立方星结构的成像纳卫星星座和下一代亚米级彩色视频成像小卫星也在研制之中。
3.1 DMC
DMC是由英国牵头的国际合作项目,星座内卫星均采用英国SSTL研制的小卫星平台,利用星座内各国家地面站获取图像信息并共享遥感数据,以较大的陆地覆盖面积提供环境监测与灾害预警。第一代灾害监测星座参与国家为阿尔及利亚,英国,尼日利亚和土耳其。第二代灾害监测星座DMC-2G参与国家为中国,英国,西班牙和尼日利亚。第三代灾害监测星座DMC-3G为中英合作的Beijing-2小卫星星座。
3.1.1 DMC-1G
DMC-1G为英国于1996年提出的国际合作项目,采用多颗低轨小卫星组网,每天提供全球中低分辨率、多光谱(3~4谱段)成像。DMC-1G包括4颗星:AlSAT-1(Algeria Satellite-1),UK-DMCSat-1,NigeriaSat-1,以及BILSAT。[28]DMC-1G星座轨道为圆形太阳同步轨道,平均高度686km,倾角98.2°,周期97.7min,升交点地方时10:15am。卫星均采用英国SSTL公司的MicroSat-100(SSTL-100)平台。DMC-1G星座卫星参数见表5。[28]
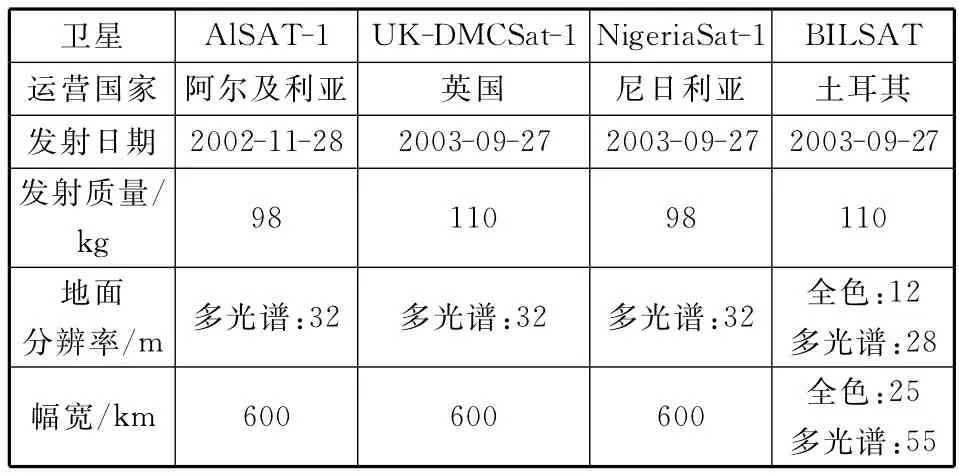
表5 DMC-1G星座卫星参数Table 5 Parameters of DMC-1Gsatellites
3.1.2 DMC-2G
DMC-2G包括5颗星:Beijing-1,UK-DMCSat-2,Deimos-1,NigeriaSat-2以及NigeriaSat-X。DMC-2G卫星参数见表6。[28-31]
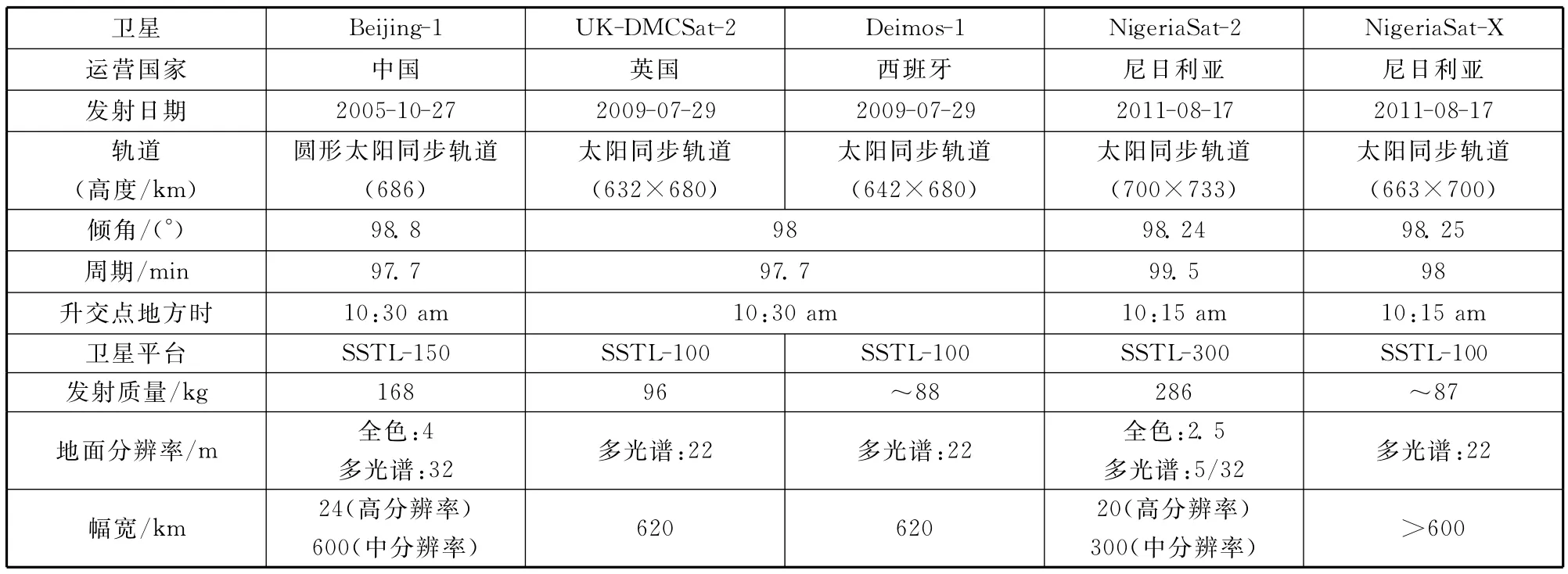
表6 DMC-2G卫星性能参数Table 6 Parameters of DMC-2Gsatellites
(1)Beijing-1。Beijing-1于2005年10月27日由俄罗斯宇宙-3M(Cosmos-3M)火箭发射,由北京宇视蓝图信息技术有限公司和英国SSTL合作研制,项目组织单位是北京市科委和国家遥感中心。[32]卫星采用SSTL公司的Microsat-150(SSTL-150)平台,有效载荷为SSTL公司的多光谱相机SLIM6(Surrey Linear Imager Multispectral 6 channels)和Sira技术有限公司研制的全色相机CMT(China Mapping Telescope)。成像敏感器采用线阵CCD(e2vCCD21-40)。[28]Beijing-1卫星参数和CMT相机性能指标分别见表7和表8。卫星示意图和构型见图16,CMT光学系统见图17,卫星拍摄的北京首都国际机场见图18。[28]
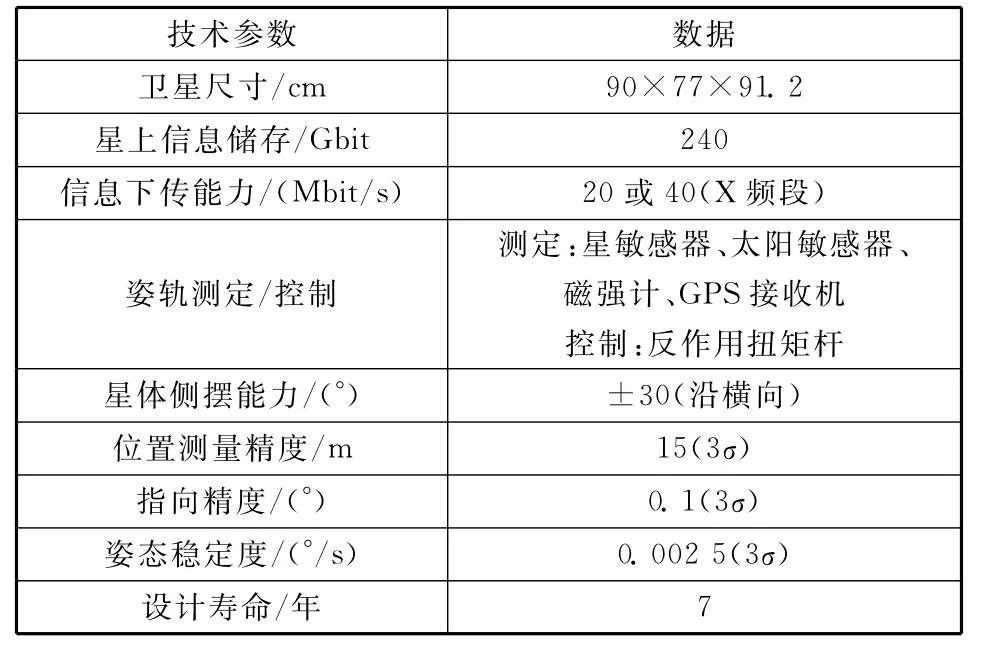
表7 Beijing-1卫星技术参数Table 7 Parameters of Beijing-1satellite

表8 CMT相机性能指标Table 8 Specifications of CMT

图16 Beijing-1卫星构型Fig.16 Illustration of the Beijing-1satellite
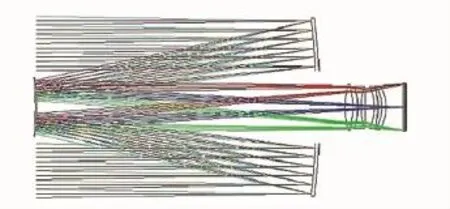
图17 CMT光学系统设计Fig.17 Optical design of CMT

图18 Beijing-1卫星拍摄的北京首都机场Fig.18 Image of Beijing airport acquired by Beijing-1
(2)NigeriaSat-2。NigeriaSat-2于2011年8月17日发射,由英国SSTL公司研制,尼日利亚国家宇航研究和发展局(National Space Research and Development Agency,NASRDA)运营。卫星采用SSTL公司的SSTL-300平台结构,为获取高机动性,采用致密型结构,无液体推进剂,且太阳电池阵固定在星体侧面。姿态控制采用4个Microwheel 10SP动量轮和4个SSTL Smallwheel 200SP零动量反作用轮。卫星所载的两台成像相机以及星敏感器固定在热弹性稳定光学平台上。成像相机分别为甚高分辨率成像仪(Very High Resolution Imager,VHRI)和中分辨率成像仪(Medium Resolution Imager,MRI)。其中,VHRI由SSTL设计,继承Beijing-1所载CMT相机,并由英国Optical Surfaces制造。[30]NigeriaSat-2卫星性能参数和VHRI相机性能指标分别见表9和表10。NigeriaSat-2卫星示意图见图19,相机VHRI示意图见图20,卫星于2011年9月拍摄的美国盐湖城机场(地面分辨率2.5m)见图21。[30]
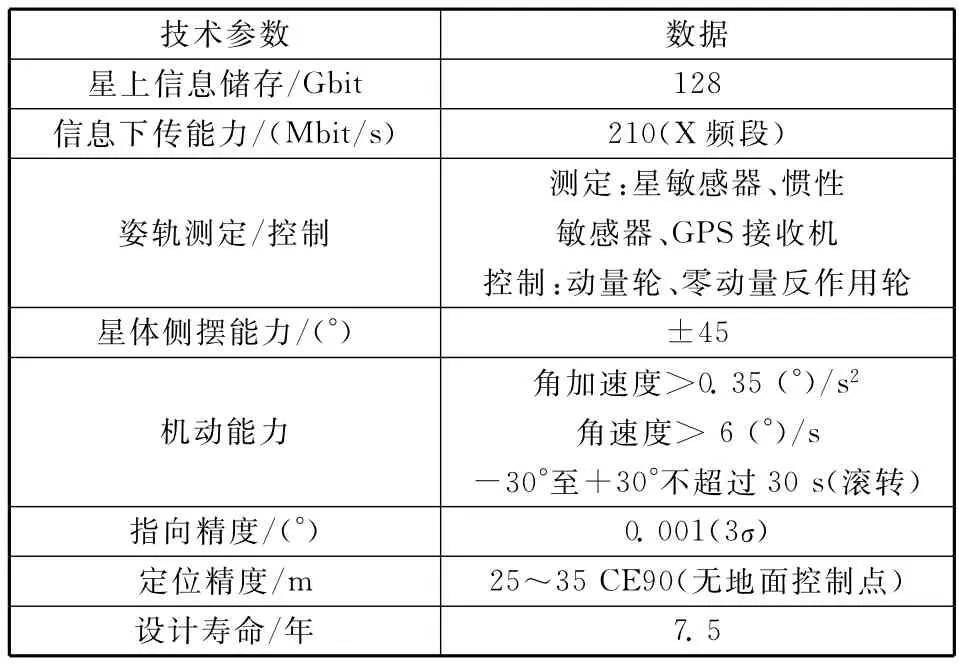
表9 NigeriaSat-2性能参数Table 9 Parameters of NigeriaSat-2
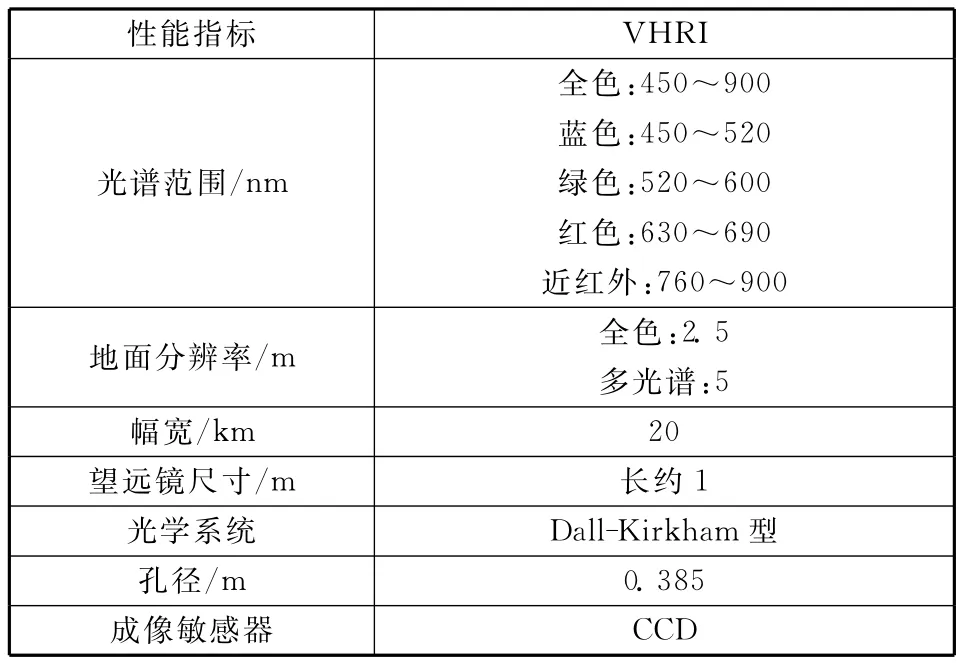
表10 VHRI性能指标Table 10 Specifications of VHRI
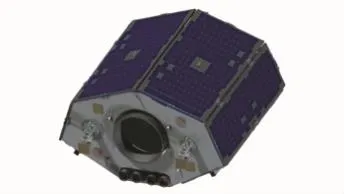
图19 NigeriaSat-2小卫星示意图Fig.19 Illustration of the NigeriaSat-2 microsatellite
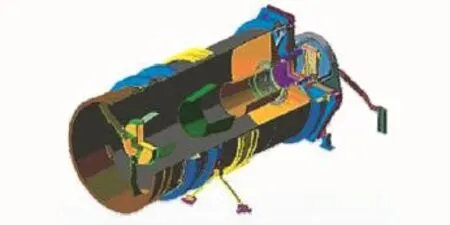
图20 VHRI仪器剖视图Fig.20 Cut-away view of the VHRI instrument

图21 NigeriaSat-2拍摄的盐湖城机场Fig.21 Image of the Salt Lake City Airport cuptured by NigeriaSat-2
3.1.3 DMC-3G(Beijing-2)
DMC-3G为中英合作项目,英国SSTL承担卫星研制,中国二十一世纪空间技术应用股份有限公司承担卫星在轨任务测控、数据接收等运营管理,并生成数据产品,以及提供相关服务。2011年,SSTL开始筹建由三颗星组成的DMC-3G星座,地面分辨率为全色1m、多光谱4m,幅宽为23.4km。2015年7月10日,星座内三颗卫星由PSLV-C28火箭发射,均分在同一轨道平面上,相邻卫星相位成120°。[33]
DMC-3G卫星由SSTL公司的DMC国际成像部门(DMC International Imaging,DMCii)研制,采用SSTL-300S1平台结构,该平台在SSTL-300平台与NigeriaSat-2电子设备和控制系统的基础上改进。卫星所载甚高分辨率成像仪100型(Very High Resolution Imager 100,VHRI 100)在Nigeria-Sat-2所载VHRI相机基础上研制。[33]
DMC-3G卫星设计参数见表11,相机性能指标见表12。卫星平台结构和VHRI 100构型分别见图22和图23,卫星于2015年7月31日拍摄的澳大利亚悉尼图像(地面分辨率1m)见图24。[33]
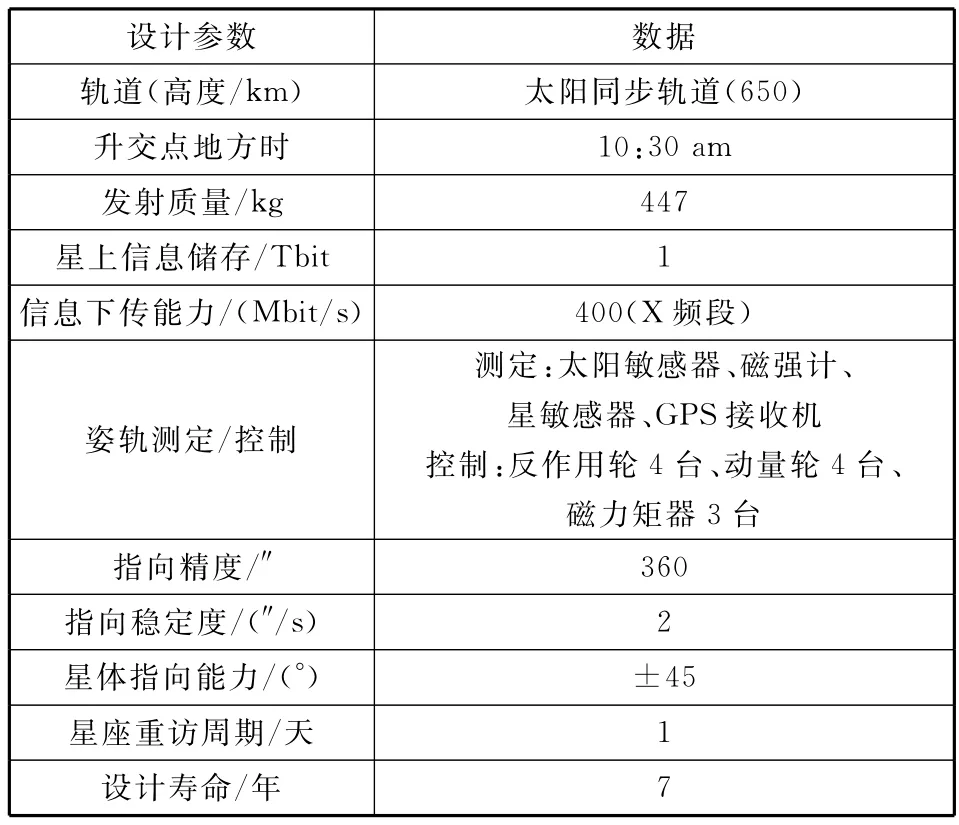
表11 DMC-3G星座卫星性能参数Table 11 Parameters of DMC-3Gsatellites

表12 VHRI 100性能指标Table 12 Specifications of VHRI 100

图22 SSTL-300S1平台示意图Fig.22 Artist`s view of the SSTL-300S1bus

图23 VHRI 100仪器构型Fig.23 VHRI 100instrument configuration
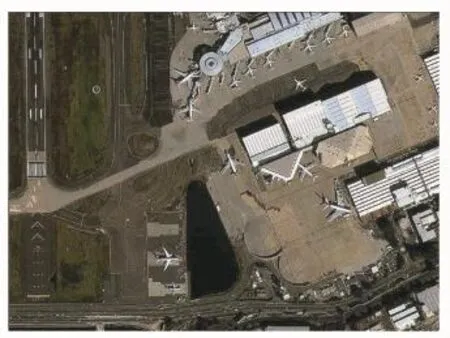
图24 Beijing-2拍摄的悉尼机场图像Fig.24 An image of the Sydney airport cuptured by Beijing-2
3.2 V1C(彩色视频成像小卫星)
2014年4月15日,SST-US(Surrey Satellite Technology US LLC)公司发布了最新研制的亚米级彩色视频成像小卫星(V1C),可应用于情报收集领域,如地面目标的监视、探测和识别。V1C卫星基于SSTL-X50平台研制,采用致密型设计,质量为50kg,具备大型星上数据存储及实时下传能力。V1C卫星可提供高清自然色(红/绿/蓝)视频,星下点地面分辨率优于1m,幅宽10km,帧率达100帧/s。同时,卫星可以静态成像模式运行。根据卫星发射的数量,V1C可构建多种卫星星座模式。若卫星以30~60min间隔布放在同一轨道,可在一天内的某一特定时间段提供近连续的视频覆盖。[34-35]SSTL-50X通用平台系列设计参数见表13,平台示意图见图25。[36]

表13 SSTL-50X通用平台系列设计参数Table 13 Design parameters of SSTL-50Xplatform
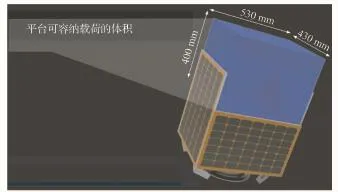
图25 SSTL-X50平台示意图Fig.25 Illustration of SSTL-50Xplatform
3.3 6U立方星方案
2010年,英国Cranfield大学空间研究中心提出用于地球观测任务的6U立方星方案,可用于构建多国合作的灾害监测星座。6U立方星计划采用美国海军研究生院立方星发射器(NPSCuL)布放。卫星所载相机采用Questar 3.5望远镜,成像敏感器采用TDI CCD(Fairchild Imaging CCD5061)。6U立方星设计参数见表14,相机性能指标见表15,卫星结构见图26。[37-39]

表14 Cranfield大学6U立方星设计参数Table 14 Design parameters of Cranfield 6UCubeSat
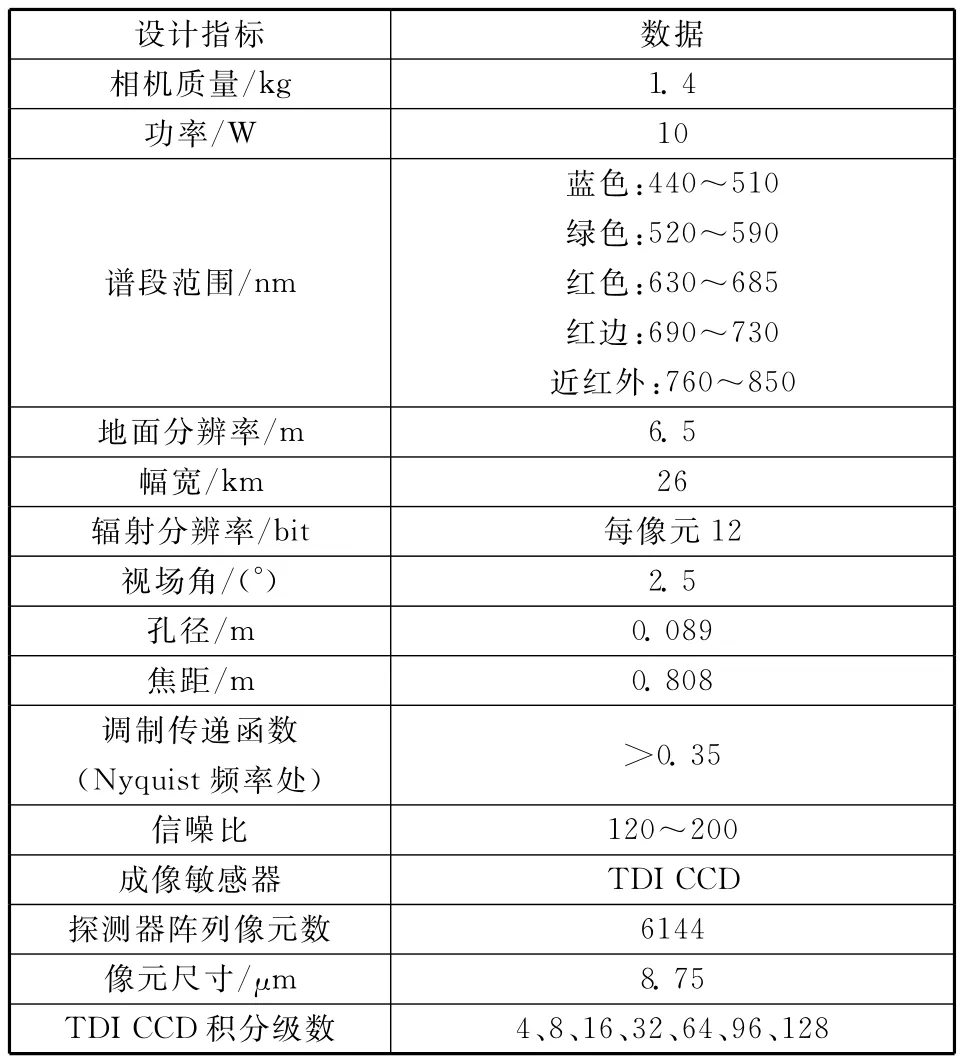
表15 相机性能指标Table 15 Specifications of camera

图26 6U立方星组件Fig.26 Packaging of 6UCubeSat
6U立方星与RapidEye比较:①立方星单颗星质量8kg,RapidEye单颗星质量156kg;②谱段数相同(蓝/绿/红/红边/近红外);③多光谱地面分辨率相同(6.5m);④立方星星座卫星数(35颗)是RapidEye星座卫星数(5颗)的7倍,因此立方星星座的时间分辨率大约是RapidEye的1/7;⑤立方星单颗星单轨数据下传量为0.9Gbyte,RapidEye单颗星为5.3Gbyte,星座使命期数据下传总量相同;⑥立方星单颗星成本(含发射成本)为130万英镑,RapidEye约为900万英镑,立方星星座成本(4550万英镑)与RapidEye星座(约4500万英镑)相近。[39]上述比较突显纳卫星/立方星星座的长处。
4 德国
德国高分光学星主要用于商业遥感,包括“快眼”(RapidEye)星座以及研制中的环境测绘与分析项目(Environmental Mapping and Analysis Program,EnMAP)。
4.1 RapidEye
RapidEye星座是第一个完全端对端的商业地球观测星座,由五颗相同的小卫星构成,多光谱地面分辨率为6.5m,星座每天成像能力为5 000 000km2。该星座由德国BlackBridge运营,为全球用户提供地球观测产品和服务,包括农业、环境、林业、测绘、防务、安全应急等应用。主承包商MDA(MacDonald,Dettwiler and Associates)公司负责空间部分和地面部分的交付,卫星发射,以及相机在轨调试与校准。英国SSTL负责卫星结构与控制系统的研制,以及卫星组装和整星测试。2008年8月29日,RapidEye星座的五颗卫星由俄罗斯第聂伯(Dnepr)火箭发射,均分在同一轨道平面,两颗星之间时间间隔为19min。[40]
卫星采用SSTL-150平台,载有德国Jena Optronik GmbH公司提供的快眼地球成像系统(RapidEye Earth Imaging System,REIS)。相机望远镜采用全铝制成,同一规格材料有利于准无热化设计,以及镜面和支撑结构之间的精密机械接合。光学器件表面处理采用超精密研磨和抛光技术,铝制反射镜表面覆盖镍涂层。滤光片置于靠近每个CCD阵列的位置处。[40-41]
RapidEye星座卫星技术参数和相机REIS性能指标分别见表16和表17。卫星构型见图27,卫星拍摄的图像见图28。[40]

表16 RapidEye星座技术参数Table 16 Parameters of RapidEye constellation

表17 REIS相机性能指标Table 17 Specific parameters of REIS

图27 RapidEye卫星外部构型及内部系统Fig.27 RapidEye spacecraft structure overview and internal systems

图28 RapidEye卫星于2009年拍摄的迪拜棕榈岛Fig.28 Palm Jumeirah in Dubai acquired by RapidEye in 2009
4.2 EnMAP
EnMAP为德国航空航天局(Deutsches Zentrum für Luft-und Raumfahrt,DLR)研制的高光谱卫星,旨在以全球尺度监测地球环境,并描述全球环境特性。EnMAP卫星计划于2018年由印度PSLV发射。卫星所载高光谱成像仪(Hyperspectral Imager,HSI)包含两个光谱成像仪:①VNIR(可见光/近红外);②SWIR(短波红外)。可见光至短波红外光谱谱段数超过240,高光谱地面分辨率为30m。[42]可见光/近红外谱段采用的CMOS敏感器已研制并经过性能测试。[43]EnMAP卫星设计参数见表18,所载HSI仪器性能指标见表19。卫星单次过境示意图见图29。[42,44]
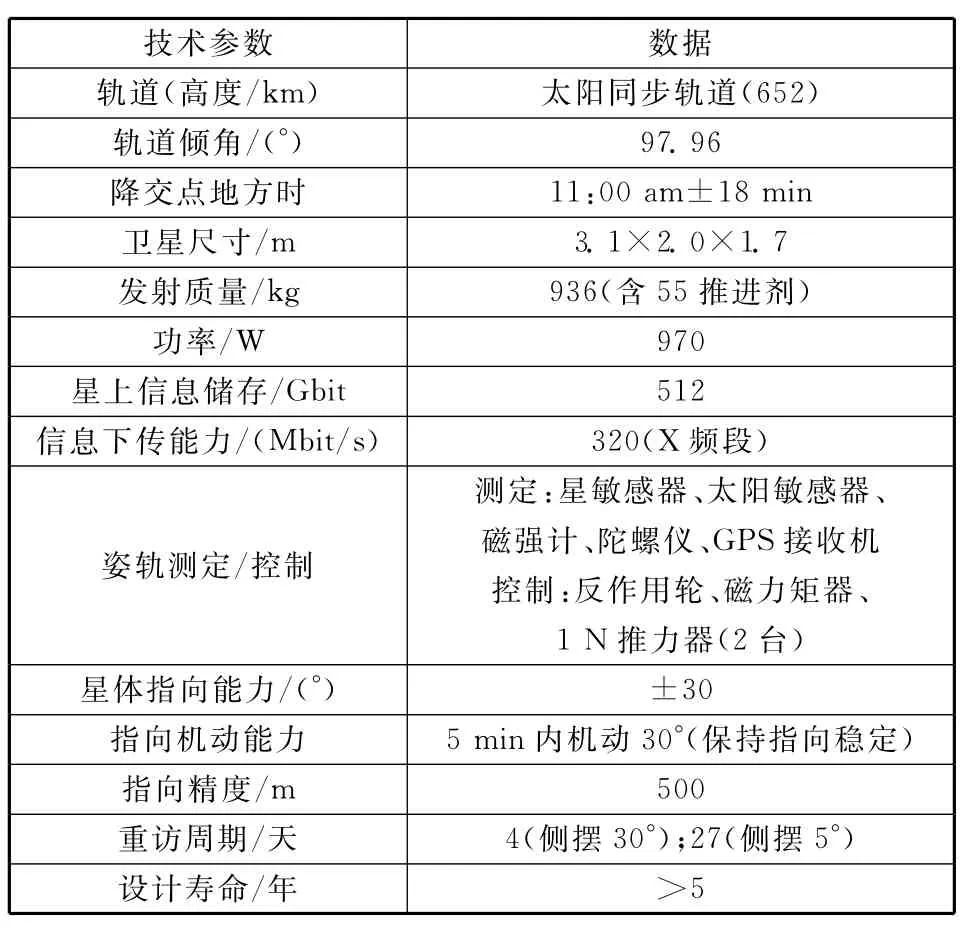
表18 EnMAP卫星设计性能参数Table 18 Design parameters of EnMAP satellite
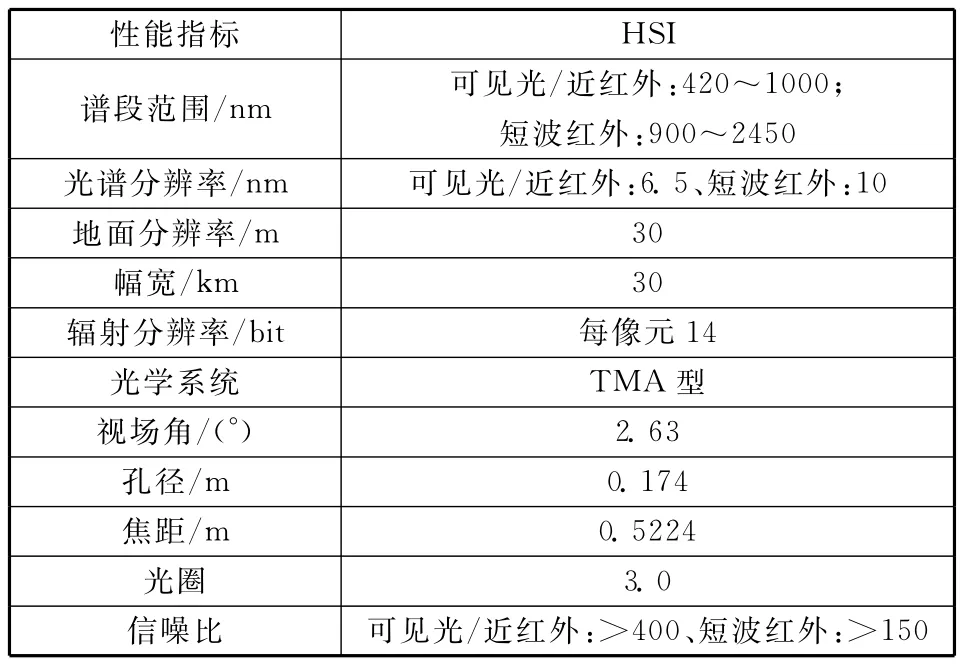
表19 HSI仪器性能指标Table 19 HSI instrument specification
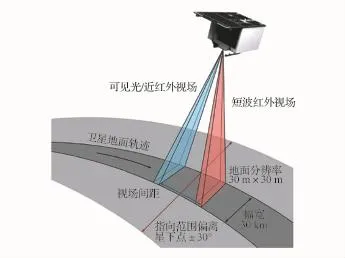
图29 EnMAP单次过境图示Fig.29 Representation of an EnMAP overpass
5 西班牙
火卫二-2(Deimos-2)卫星于2014年6月19日由Dnepr-1火箭发射。卫星由西班牙Deimos Imaging公司运营,提供商业高分辨率图像。Deimos-2采用韩国SI(Satrec Initiative)的SpaceEye-1平台(或称为SI-300)。有效载荷为韩国SI和Elecnor Deimos合作研制的高分辨率先进成像系统(High Resolution Advanced Imaging System,HiRAIS)。HiRAIS由光电分系统(Electro-Optical Subsystem,EOS)、固态存储单元和图像传输单元组成。其中,EOS包括望远镜、辅助相机模块以及焦平面阵列。[45]
Deimos-2卫星参数和相机HiRAIS的性能指标分别见表20和表21。Deimos-2卫星示意图见图30,相机示意图见图31。卫星拍摄的多哈2022年世界杯场馆图像见图32。[45]
表20 Deimos-2卫星参数Table 20 Parameters of Deimos-2satellite

表21 相机HiRAIS性能指标Table 21 Specifications of HiRAIS
图30 Deimos-2卫星展开的两个角度示意图Fig.30 Two views of the deployed Deimos-2spacecraft
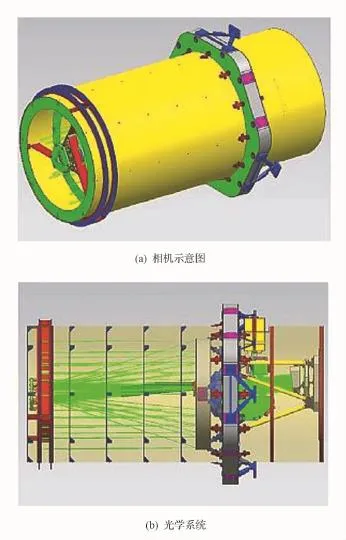
图31 HiRAIS相机示意图及光学系统Fig.31 Illustration of the HiRAIS instrument and optical system
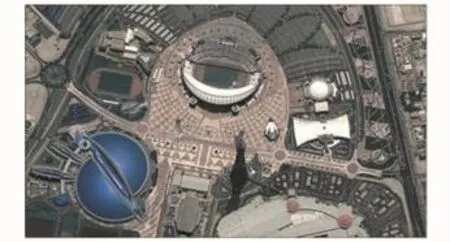
图32 Deimos-2拍摄的卡塔尔首都多哈2022年世界杯场馆Fig.32 Image of Doha showing the sports complex for the Soccer World Cup 2022cuptured by Deimos-2
6 意大利
法国与意大利于2001年1月签订侦察卫星数据交换协议“光学与雷达联合地球观测”(Optical and Radar Federated Earth Observation,ORFEO),按协议意大利以75幅Cosmo-SkyMed的雷达图像换取7幅法国Helios或Pleiades的光学图像。[46]2012年,意大利提出研制并自主运营高分光学星计划,以满足对光学图像的需求。意大利军用侦察卫星购买以色列研制的“光学卫星3000型”(OPtical SATellite-3000,OPSAT-3000),预计于2016年初期发射;意大利研制的“成像与监视光学系统”(OPtical System for Imaging and Surveillance,OPSIS)和“高光谱先驱与应用使命”(PRecursore IperSpettrale della Missione Applicativa,PRISMA)预计分别于2016年和2018年发射。
6.1 OPSAT-3000
意大利于2012年购买的卫星OPSAT-3000由以色列宇航工业公司(Israel Aerospace Industries,IAI)研制,预计于2016年初期由织女星(Vega)运载火箭发射,进入高600km的太阳同步轨道,使命期大于6年。卫星采用改进型多用途卫星II型(Improved Multi Purpose Satellite-II,IMPS-II)平台,发射质量约400kg,有效载荷为以色列Elbit Systems Electro-Optics Elop研制的全色/多光谱先进空间相机Jupiter,地面分辨率(全色)为0.5m。OPSAT-3000卫星见图33。[47]

图33 OPSAT-3000卫星示意图Fig.33 Illustration of OPSAT-3000
6.2 OPSIS
OPSIS由意大利CGS(Compagnia Generale per lo Spazio)卫星制造商负责研制,用以和Cosmo-SkyMed雷达卫星星座协同运行,预计于2016年由Vega火箭发射。卫星发射质量约为800kg,设计地面分辨率为全色优于1m、多光谱优于2m。[48]OPSIS卫星示意图见图34。[49]

图34 OPSIS示意图Fig.34 Illustration of OPSIS spacecraft
6.3 PRISMA
PRISMA为意大利航天局(Agenzia Spaziale Italiana,ASI)研制的高光谱卫星,该计划始于2008年,预计于2018年发射。卫星地面分辨率为全色5m、高光谱30m,主要用于欧洲和地中海区域的环境保护、可持续发展、气候变化等应用。[50]
PRISMA卫星载有全色相机和高光谱相机,意大利Selex ES(2013年之前为Selex Galileo)负责相机的设计、制造、装配、测试以及校准。两台相机共用同一望远镜(TMA型),全色和高光谱谱段的隔开是通过视场内的分离实现的(沿轨迹方向)。分光仪的狭缝放置在全色和高光谱场内分离之后、共用的校准仪之前。高光谱相机采用棱镜分光仪分光,光谱分辨率小于12nm。PRSIMA性能参数和相机设计指标分别见表22和表23,PRIMA卫星见图35。[50-52]
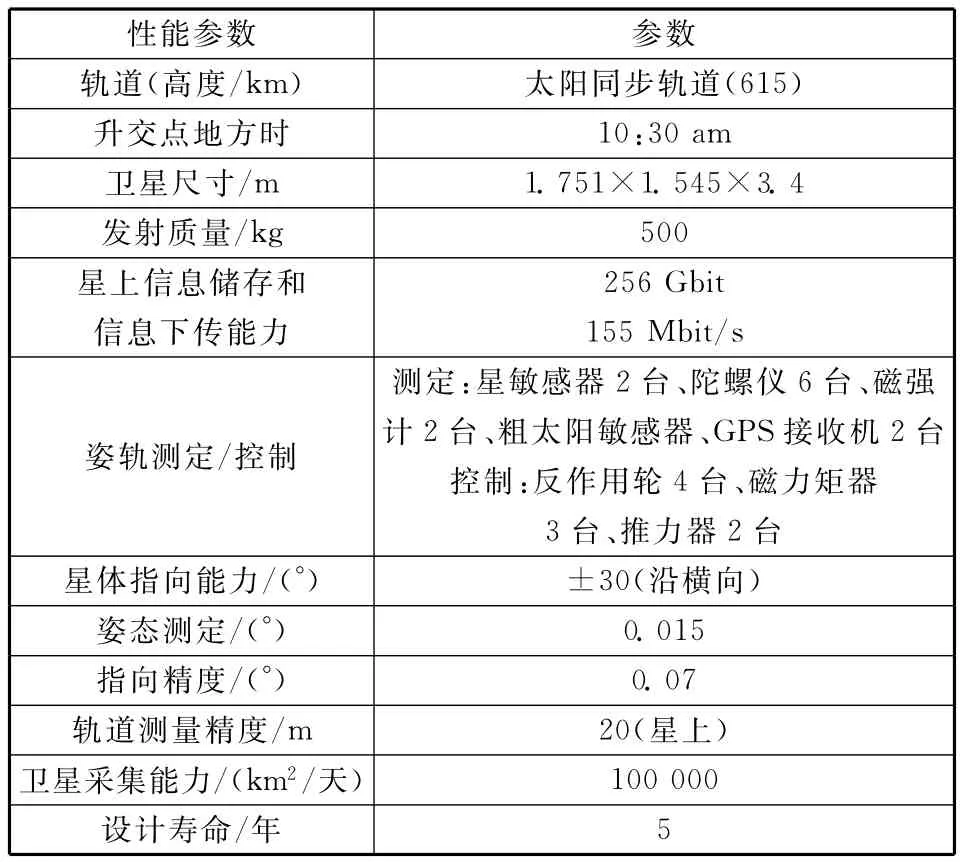
表22 PRISMA卫星性能参数Table 22 Performances of PRISMA satellite
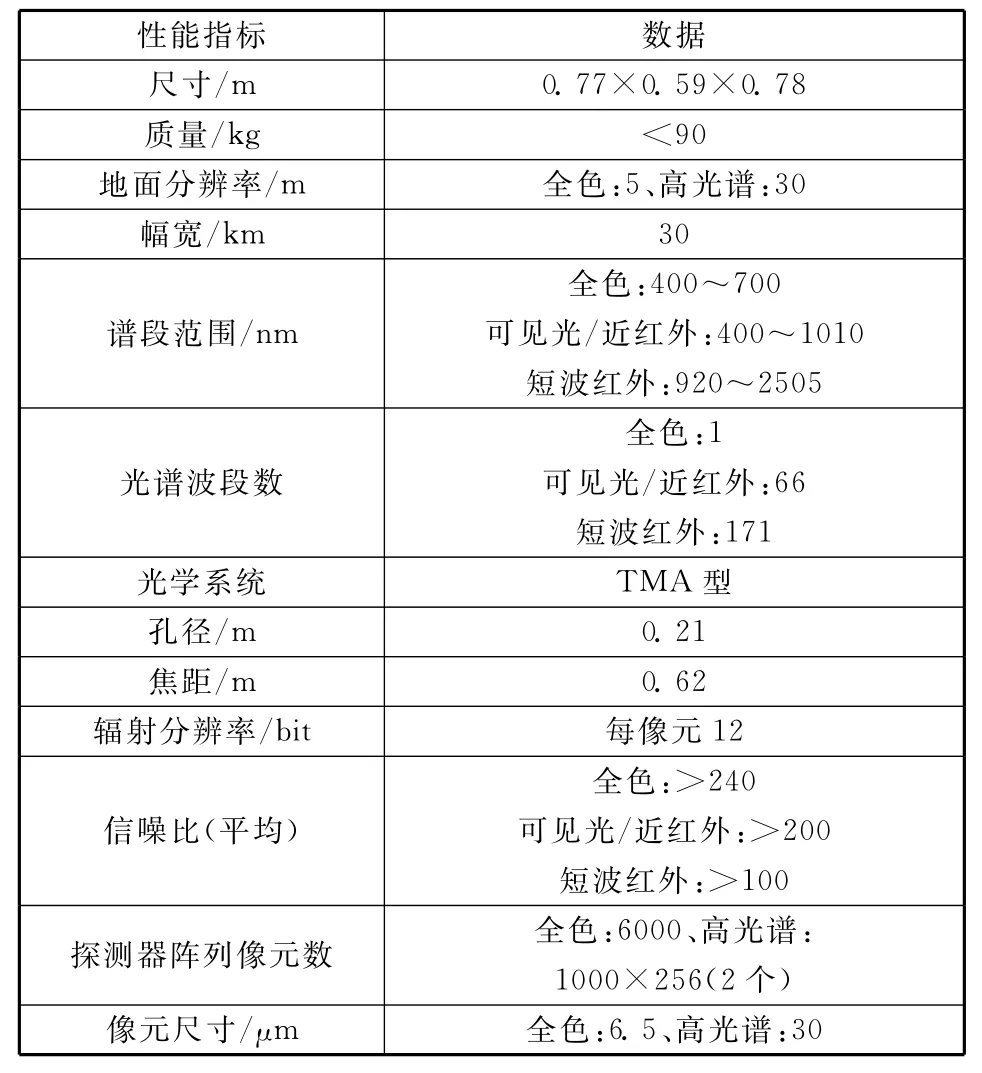
表23 PRISMA仪器性能指标Table 23 Specification of the PRISMA instrument

图35 PRISMA卫星示意图Fig.35 Illustration of PRISMA spacecraft
7 法国-以色列合作项目
“植被与环境新型小卫星”(Vegetation and Environment New Micro Satellite,VENμS)是CNES和以色列航天局(Israel Space Agency,ISA)的第一个地球观测合作项目。ISA负责卫星平台研制、卫星组装和卫星姿轨控制与运行,CNES提供高分辨率相机以及对科学数据进行处理。VENμS预计于2016年由Vega火箭发射,使命分为科学探测和技术演示两个阶段:①对陆地环境、植被、人类活动进行探测;②验证霍尔电推进技术和低轨轨道保持能力,并进行低轨成像。[53]
VENμS卫星采用IAI和Rafael Advanced Defense Systems Ltd共同研制的IMPS平台。卫星所载有效载荷为VENμS高光谱相机(VENμS Super-spectral Camera,VSSC)。VSSC为12谱段推扫式成像仪,焦平面放置4个探测器单元,每单元包含3个独立的TDI CCD阵列。相机结构采用轻量化钛框架,主镜固定,由复合材料制成的镜筒保持次镜在合适的位置。主镜和次镜均采用微晶玻璃制成,焦平面支撑结构采用殷钢制成,提供良好的热稳定性环境。每个探测器前备有视场光阑,其上固定滤光镜。[53]
VENμS卫星设计参数和相机性能指标分别见表24和表25。卫星示意图见图36,相机结构见图37,光学系统见图38。[53]

表24 VENμS卫星设计参数Table 24 Design parameters of VENμS spacecraft
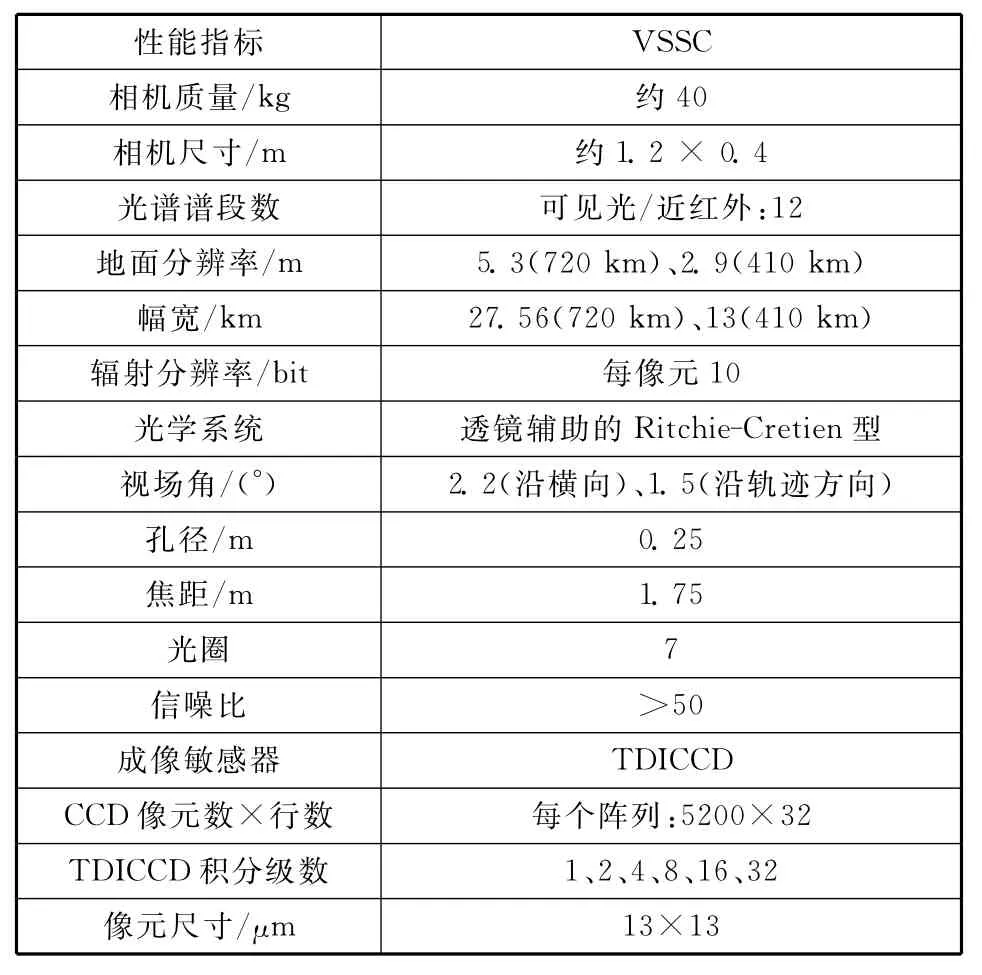
表25 相机VSSC性能指标Table 25 Specifications of VSSC
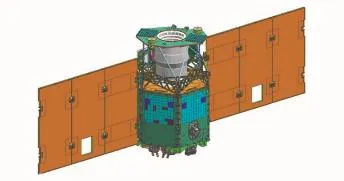
图36 VENμS卫星展开示意图Fig.36 Illustration of the deployed VENμS spacecraft
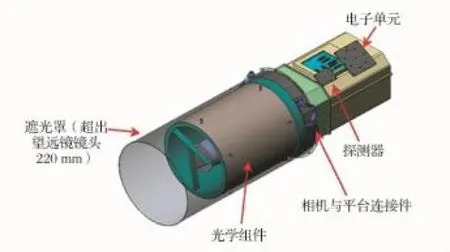
图37 VSSC仪器示意图Fig.37 Illustration of the VSSC instrument

图38 VSSC焦平面构型Fig.38 Focal plane configuration of the VSSC
8 ESA地球静止光学星计划
地球静止高分辨率使命(Geostationary High Resolution Mission,GEO-HR)由ESA提出,主要用于海事安全/监视、灾害管理、陆地安全/监视,以及环境监测等地球观测应用。[54]GEO-HR包含三个项目:①GEO-Oculus(孔径1.5m,分辨率10m);②Astrium GO3S(孔径4m,分辨率3m);③光学合成孔径系统(合成孔径7m,分辨率2m)。[54-55]
8.1 GEO-Oculus
2009年,ESA提出GEO-Oculus卫星方案,旨在研发高空间/时间/光谱分辨率的地球静止光学星,主要用于欧洲及周边区域的减灾、资源、海洋等应用,预计于2018年发射。主要观测区域为欧洲本土大陆、海岸线以及地中海区域,同时可选择性地对非洲和中东西部区域进行观测。[56]
卫星平台在第三代气象卫星(Meteosat Third Generation,MTG)基础上研制,通过磁轴承反作用轮实现“凝视-步进”的观测模式,同时尽量减小飞轮对卫星的扰动,提供视场快速重定向能力,2min内可获取新规划目标区域的图像。推进系统由一个四贮箱双组元推进剂系统组成,用于卫星轨道射入和位置保持,并采用推力器对动量轮饱和进行卸载。[56]
卫星所载相机设计特点如下:①直径1.5m的整块主镜由碳化硅制成,具备精密光学特性,进而采用图像去卷积技术提高MTF;②成像光谱中增加用于水面浮油、藻华毒性监测的紫外谱段,以及用于精确修正海洋成分和海洋表面温度的中波红外和热红外谱段;③全部谱段均具有高信噪比,且短波红外、中波红外和热红外具有高辐射分辨率,适合探测包括火灾温度和森林火灾多发区域在内的高温现象;④第一个分光镜将紫外-蓝色/红色-近红外和红外分为两组,在每组内第二个分光镜实现焦平面之间的分离;⑤每个焦平面采用一个滤光轮(共4个);⑥红外焦平面前安置止冷器保持低温(中波红外130K、热红外50K);⑦全色、紫外-蓝色和红色-近红外谱段采用大面阵CMOS探测器,动态范围高且读出速度快;⑧中波红外和热红外谱段采用结合HgCdTe或AlGaAs/GaAs量子阱红外光子探测器(Quantum Well Infrared Photon Detectors,QWIP)的CMOS。[56-57]
GEO-Oculus卫星参数和相机性能指标分别见表26和表27。卫星折叠构型和系统结构见图39,相机光学系统见图40。[57]

表26 GEO-Oculus卫星技术参数Table 26 Design parameters of Geo-Oculus

续 表
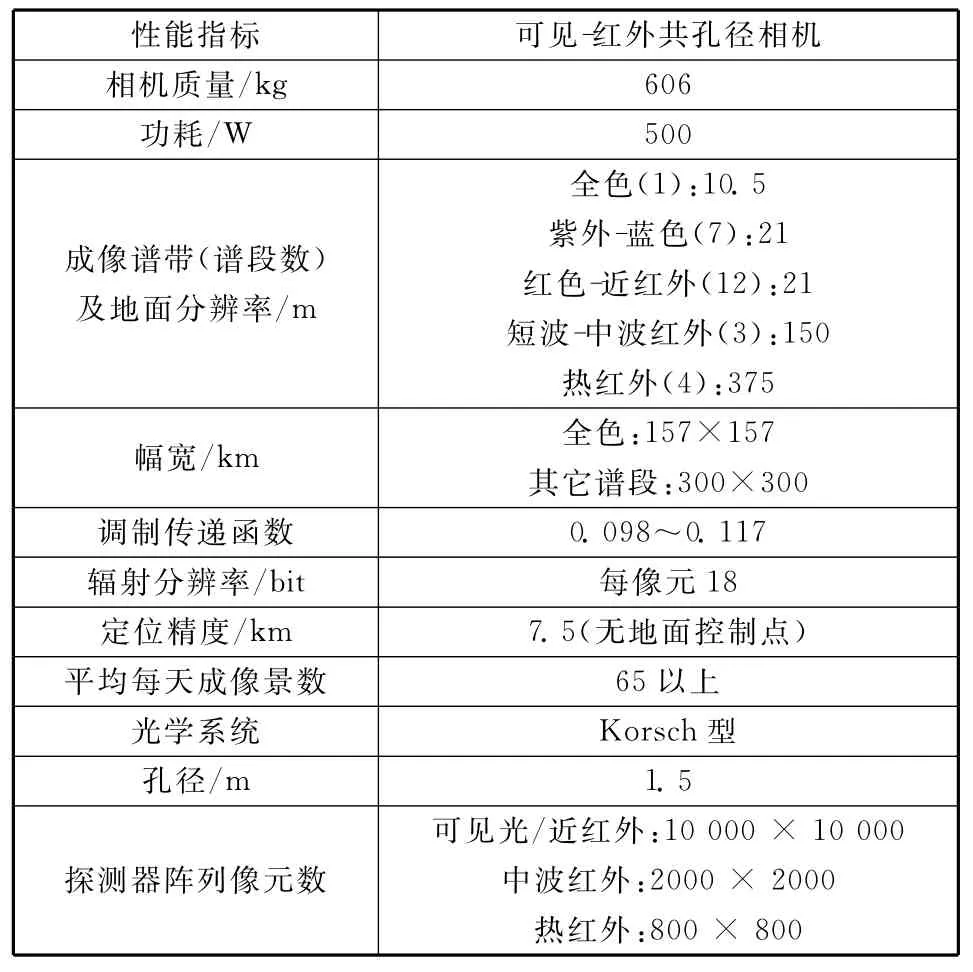
表27 GEO-Oculus卫星光学仪器性能指标Table 27 Specfications of Geo-Oculus optical instrument
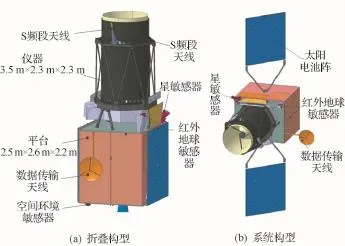
图39 GEO-Oculus卫星折叠构型和系统构型Fig.39 Stowed configuration and system layout of GEO-Oculus
8.2 Astrium GO3S
Astrium GO3S地球静止轨道系统具备甚高分辨率成像和视频能力,主要设计特点:①受Ariane-5运载火箭的限制,仪器孔径直径最大不超过4m;②采用锐边反射镜与超大焦平面,可无缝覆盖100km×100km视场,地面采样距离(GSD)为3m;③甚高性能视频压缩,可实现5Hz的10亿像素视频流;④利用多种先进的系统和概念实现所需指向稳定性,在视场重新定向时仍保持灵活性;⑤目前仅有全色谱段,多光谱谱段的实现有待进一步分析。GO3S概念关键性能参数见表28,卫星设计图见图41。[54]
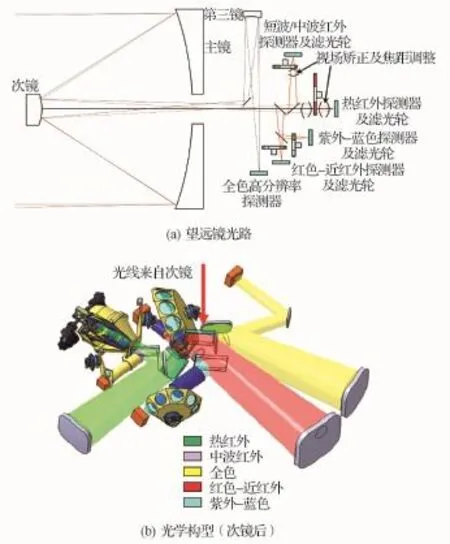
图40 GEO-Oculus多光谱成像望远镜光学构型Fig.40 Multi-spectral imaging telescope optical architecture of GEO-Oculus
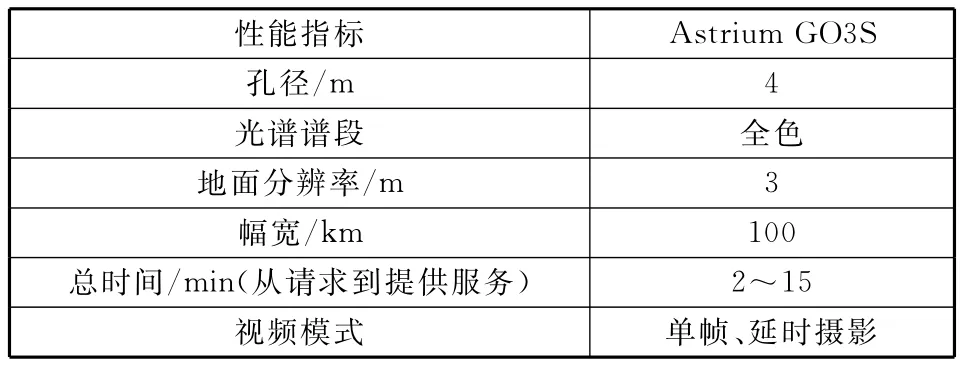
表28 Astrium GO3S概念关键特性Table 28 Key characteristics of Astrium GO3Sconcept

图41 Astrium GO3S概念设计图Fig.41 Design of Astrium GO3Sconcept
8.3 光学合成孔径系统
为提高地面分辨率(优于3m),ESA提出光学合成孔径(Optical Synthetic Aperture)设计概念。按照图像品质(MTF×SNR=4)和地面分辨率(2m)的要求,合成孔径直径须达到7m,通过在直径5m的圆周上均分6个直径为2m的主镜实现。[55]卫星发射质量为8662kg,在轨展开构型尺寸为10m×14.3m×6m。合成孔径仪器设计参数见表29。仪器中心机械结构见图42,卫星展开尺寸见图43。[55,58]
卫星设计特点:①采用可延展的热管和散热器;②数据下传采用直径0.7m的Ka频段天线;③为获得可接受的MTF,在单位积分时间(28ms)内视线稳定性优于16.5nrad(3/10像元),3/10像元在姿态漂移和抖动干扰之间进行分配;④仪器配置精确的视线主动控制机构减小漂移;⑤为使每天能生成1500幅图像,卫星需在18s内实现0.1°的指向机动,应急模式下可在2min内实现6°的指向机动;⑥须采用无源滤波装置,以减小姿态控制致动器产生的干扰。[55]
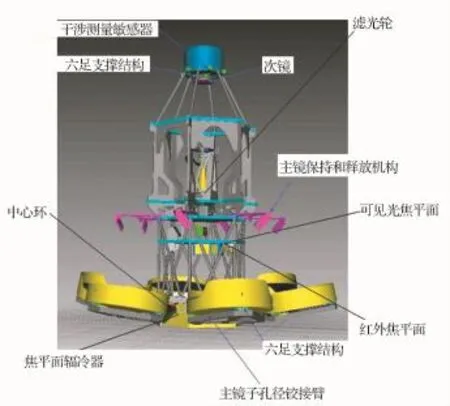
图42 合成孔径仪器的中心机械结构Fig.42 Central mechanical structure of optical synthetic aperture instrument
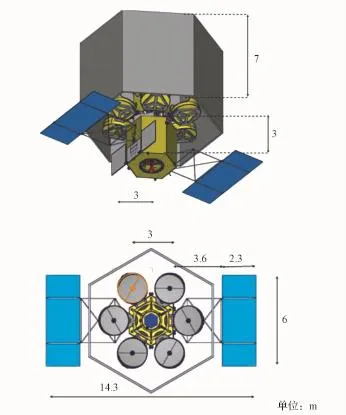
图43 卫星展开尺寸示意图Fig.43 Size of deployed satellite
9 欧非地球静止光学星计划
Africa-GeoSat1项目由欧盟委员会和非洲联盟共同投资,Astrium牵头研制并提供技术支持,非洲自行运营。该项目采用地球静止卫星对非洲环境进行监测,地面分辨率(可见光/近红外)为星下点25m至观测区域边界35m,图像品质(MTF和SNR)与低轨卫星相当。Africa-GeoSat1卫星预计于2017年末期发射。[59]
Africa-GeoSat1卫星采用由EADS-Sodern制造的高性能星敏感器HYDRA与Astrium制造的高性能陀螺Astrix FOG相结合实现姿态测定。有效载荷为一台大孔径光学相机,所有光谱谱段共用直径1m的Korsch型望远镜,主镜和次镜位于承载第三镜和平面反射镜的水平结构平台的上方。光束经多个分光镜分光至3个焦平面:①附有滤光轮的可见光/近红外焦平面;②短波红外焦平面;③置于低温恒温器内的热红外焦平面。[59]
卫星成像采用“凝视-步进”工作模式,平均4~5天可获得一幅完整的非洲大陆图像。单元图像面积为75km×75km,通过顺序转动扫描镜将16幅单元图像拼合为产品图像(300km×300km)。在转动扫描镜过程中,卫星相对地球保持静止;16幅单元图像获取之后,卫星指向下一处成像区域。时间分辨率(重访周期)为系统技术的重大突破,常规模式下为500s,应急请求模式下为30min(对应于现场运作的应急指令生成周期)。卫星具有可选择地方时,并可在不同太阳时对同一地区进行观测;同时可克服云层遮挡问题,尤其是针对到目前为止由于高云层覆盖度而导致可见光图像几乎不可用的非洲地区。[59]
Africa-GeoSat1卫星参数和空间相机性能指标分别见表30和表31。Africa-GeoSat1卫星结构见图44,所载相机示意图和内部构型见图45。[59-60]
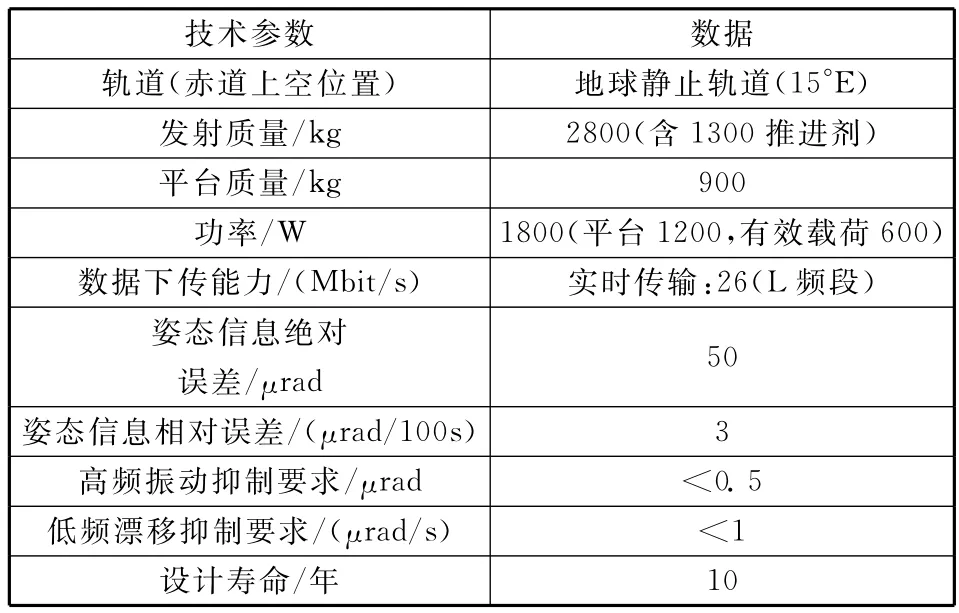
表30 Africa-GeoSat1卫星设计参数Table 30 Design parameters of Africa-GeoSat1
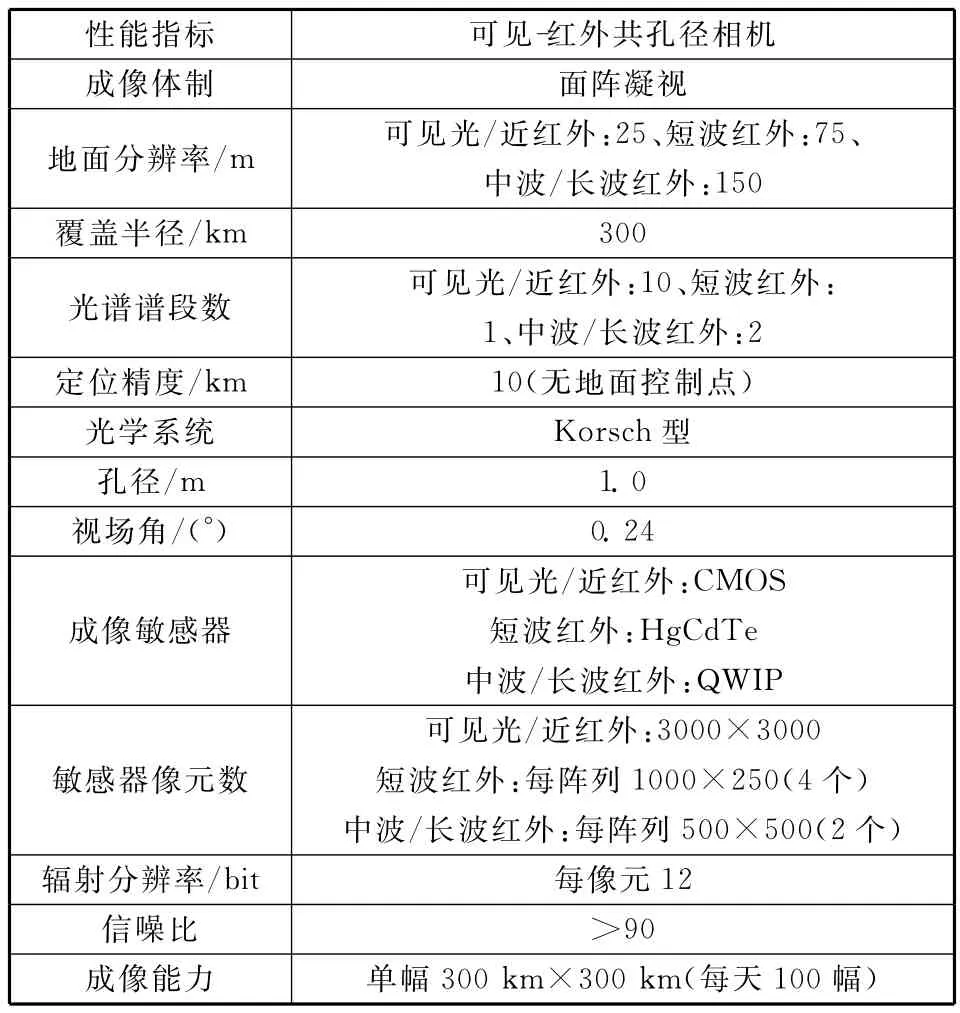
表31 Africa-GeoSat1卫星相机性能指标Table 31 Specfications of Africa-GeoSat1camera

图44 Africa-GeoSat1卫星结构Fig.44 Africa-GeoSat1satellite configuration
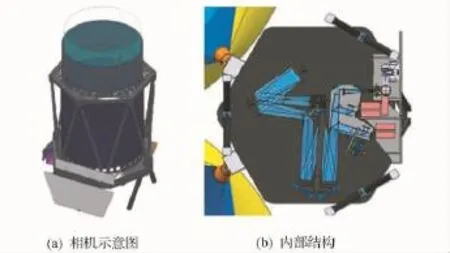
图45 Africa-GeoSat1卫星相机示意图与内部结构Fig.45 Illustration and internal constructure of the Africa-GeoSat1camera
10 结束语
欧洲低轨高分光学星中,法国军用侦察卫星Helios-2地面分辨率为0.35m;商业地球观测卫星中,法国Pleiade星座成像能力最高(地面分辨率0.5m),下一代甚高分辨率光学星可达0.3m。英国以SSTL为中心进行小型卫星的研制,目前分辨率可达1m,亚米级彩色视频成像小卫星正在研制之中。德国和意大利均已开展高光谱卫星的研制。6U立方星星座及米级地球静止光学星等新概念已被提出。地球静止光学星由ESA牵头,采用传统相机分辨率最高为3m,而光学合成孔径技术可进一步提高地面分辨率,分辨率优于3m。
(References)
[1]Gunter’s Space Page.Helios 1A,1B[EB/OL].[2015-06-03].http://space.skyrocket.de/doc_sdat/helios-1a.htm
[2]French Imagery Intelligence.HELIOS 1A[EB/OL].[2015-06-03].http://fas.org/spp/guide/france/military/imint/helios1a.htm
[3]Airbus Defence and Space.Helios 2[EB/OL].[2015-06-03].http://www.space-airbusds.com/en/programmes/helios-ii-a13.html
[4]Gunter’s Space Page.Helios 2A,2B[EB/OL].[2015-06-03].http://space.skyrocket.de/doc_sdat/helios-2a.htm
[5]Peter B.de Selding.French Helios 2Bspy sat sends back first test images[EB/OL].[2015-06-05].http://spacenews.com/32557french-helios-2b-spy-sat-sends-back-firsttest-images/
[6]Airbus Defence and Space.Future optical reconnais sance satellites for the French Armed Forces and European partners[EB/OL].[2015-06-05].http://www.space-airbusds.com/en/programmes/cso-future-opticalreconnaissance-satellites-for-the-french-armed-forcesand-khe.html
[7]Gunter’s Space Page.CSO 1,2[EB/OL].[2015-06-30].http://space.skyrocket.de/doc_sdat/cso-1.htm
[8]Satellite Imaging Corp.SPOT-5satellite imagery and satellite sensor specifications[EB/OL].[2015-02-20].http://www.satimagingcorp.com/satellite-sensors/SPOT-5
[9]CNES.Spot satellite technical data[EB/OL].[2015-02-20].http://spot5.cnes.fr/gb/programme/111.htm
[10]CNES.SPOT 1to 5-A prodigious programme[EB/OL].[2015-02-20].http://www.cnes.fr/web/CNES-en/1417-spot-1-to-5.php
[11]CNES.Technical features and operation[EB/OL].[2015-02-20].http://www.cnes.fr/web/CNES-en/1420-technical-features-and-operation.php
[12]SPOT satellite earth observation system presentation to the JACIE civil commercial imagery JACIE civil commercial imagery evaluation workshop[R/OL].[2015-12-28].https://calval.cr.usgs.gov/wordpress/wp-content/uploads/JACIE_files/JACIE07/Files/21Miller.pdf
[13]EoPortal Directory.SPOT-5[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/s/spot-5
[14]Satellite Imaging Corp.SPOT-6satellite imagery and satellite sensor specifications[EB/OL].[2015-02-26].http://www.satimagingcorp.com/satellite-sensors/spot-6/
[15]Satellite Imaging Corp.SPOT-7satellite imagery and satellite sensor specifications[EB/OL].[2015-02-26].http://www.satimagingcorp.com/satellite-sensors/spot-7/
[16]EoPortal Directory.SPOT-6and 7[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/s/spot-6-7
[17]Satellite Imaging Corp.Pleiades-1Asatellite imagery and satellite sensor specifications[EB/OL].[2015-02-26].http://www.satimagingcorp.com/satellite-sensors/pleiades-1/
[18]Satellite Imaging Corp.Pleiades-1Bsatellite imagery and satellite sensor specifications[EB/OL].[2015-02-26].http://www.satimagingcorp.com/satellite-sensors/pleiades-1b/
[19]Blarre L,Ouaknine J,Oddos-Marcel L,et al.High accuracy sodern star trackers:recent improvements proposed on SED36and HYDRA star trackers[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.Washington D.C.:AIAA,2006
[20]Haller D,Neumaier K,Khan S H,et al.Manufacturing&control of the aspherical mirrors for the telescope of the French satellite Pleiades-art.no.66870T[C]//Proceedings of SPIE-The International Society for Optical Engineering,2007,6687
[21]Gleyzes A,Perret L,Cazala-Houcade E.Pleiades system is fully operational in orbit[C]//EARSeL Symposium.Germany:EARSeL.,2013
[22]Lamard J L,Gaudin-Delrieu C,Valentini D,et al.Design of the high resolution optical instrument for the PLEIADES HR earth observation satellites[C]//Proceedings of International Conference on Space Optics.Paris,France:ICSO,2004:149-156
[23]EoPortal Directory.Pleiades[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/p/pleiades
[24]Materne A,Virmontois C,Bardoux A,et al.CNES developments of key detection technologies to prepare next generation focal planes for high resolution earth observation[C]//SPIE Remote Sensing.International Society for Optics and Photonics.Bellingham:SPIE,2014
[25]上帝之眼.2月8日北京故宫Pleiades-1卫星影像[EB/OL].[2015-02-10].http://www.godeyes.cn/html/2012/12/14/download_14081.html Godeyes.Image of the Palace Museum in Beijing acquired by Pleiades-1satellite on February 8th.[2015-02-10].http://www.godeyes.cn/html/2012/12/14/download_14081.html(in Chinese)
[26]Costes V,Cassar G,Escarrat L.Optical design of a compact telescope for the next generation earth observation system[C]//International Conference on Space Optics.Paris,France:ICSO,2012
[27]Bougoin M,Lavenac J,Coatantiec C,et al.A new technological step for SiC mirrors preparing OTOS[C]//International Conference on Space Optics.Paris,France:ICSO,2014:10
[28]EoPortal Directory.DMC[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellitemissions/d/dmc
[29]EoPortal Directory.DEIMOS-1[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/d/deimos-1
[30]EoPortal Directory.NIGERIASAT-2[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/n/nigeriasat-2
[31]EoPortal Directory.NIGERIASAT-X[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/n/nigeriasat-x
[32]Beijing Capital International Airport[EB/OL].[2015-03-30].http://www.blmit.com.cn/document/redianyingxiang.jsp Beijing Capital Intelnational Airport
[33]EoPortal Directory.DMC-3[EB/OL].[2015-12-30].https://directory.eoportal.org/web/eoportal/satellite-missions/d/dmc-3
[34]ENGLEWOOD,COLO.Surrey satellite US introduces next-generation color video-imaging small satellite[EB/OL].[2016-01-20].http://www.sst-us.com/images/other/pr_2014_04_v1c.pdf
[35]SSTL.Surrey annouces next-gen color vidoe-imaging smallsat at GEOINT 2013[EB/OL].[2016-01-11].http://www.sst-us.com/blog/april-2014/surrey-showcas-es-suite-of-geospatial-intelligence
[36]SSTL.The SSTL-X50series[EB/OL].[2016-01-11].http://www.sstl.co.uk/Downloads/Brochures/SSTL-X50-Brochure-Jun-14-Web
[37]Tsitas S R,Kingston J.6UCubeSat design for earth observation with 6.5mGSD,five spectral bands and 14Mbps downlink[J].Aeronautical Journal,2010,114(1161):689-697
[38]Crook M R.NPS CubeSat launcher design,process and requirements[D].Monterey,California:Naval Postgraduate School,2009
[39]Tsitas S R,Kingston J.6UCubeSat commercial applications[J].Aeronautical Journal,2012,116(1176):189-198
[40]EoPortal Directory.RapidEye earth observation constellation[EB/OL].[2015-05-20].https://directory.eoportal.org/web/eoportal/satellite-missions/r/rapideye
[41]Doengi F,Engel W,Pillukat A,et al.JSS multispectral imagers for earth observation missions[C]//Small Satellites for Earth Observation:Selected Proceedings of the 5th International Symposium of the International Academy of Astronautics.France:IAA,2005
[42]ENMAP.Exploring the earth’s ecosystems on a global scale[EB/OL].[2015-12-20].http://www.enmap.org/sites/default/files/pdf/pub/Flyer_EnMap_eng_web_gro%C3%9F.pdf
[43]Eckardt A,Reulke R,Schwarzer H,et al.CMOS detector for imaging VNIR spectrometry[C]//SPIE Optical Engineering+Applications.Bellingham:SPIE,2013
[44]ENMAP.EnMAP HSI instrument specification[EB/OL].[2015-12-20].http://www.enmap.org/sites/default/files/pdf/Table_EnMAP_Specs.pdf
[45]EoPortal Directory.Deimos-2[EB/OL].[2015-02-26].https://directory.eoportal.org/web/eoportal/satellite-missions/d/deimos-2
[46]Peter B.Italian Military buys$100Mspy satellite from Israel in exchange deal[EB/OL].[2015-12-20].http://spacenews.com/Italian-military-buys-100m-spy-satellite-Israel-exchange-deal/
[47]Airforce-technology.OPTSAT 3000earth observation satellite[EB/OL].[2015-12-20].http://www.airforce-technology.com/projects/optsat-3000-earth-observation-satellite/
[48]Peter B.Italian Space Agency taps CGS to design optical imaging satellite[EB/OL].[2015-12-20].http://spacenews.com/italian-space-agency-taps-cgs-design-optical-imaging-satellite/
[49]Gunter’s Space Page.OPSIS[EB/OL].[2015-12-20].http://space.skyrocket.de/doc_sdat/opsis.htm
[50]Sacchetti A,Cisbani A,Babini G,et al.The Italian precursor of an operational hyperspectral imaging mission[M].Berlin:Springer,2010:73-81
[51]Meini A M,Battazza F,Formaro R,et al.Progress in the hyperspectral payload for PRISMA programme[C]//Proceedings of SPIE-The International Society for Optical Engineering.Bellingham:SPIE,2013
[52]Barducci A,Guzzi D,Lastri C,et al.Simulating the performance of the hyperspectral payload of the Prisma mission[C]//Geoscience and Remote Sensing Symposium(IGARSS).New York:IEEE,2012
[53]EoPortal Directory.VENμS[EB/OL].[2015-02-20].https://directory.eoportal.org/web/eoportal/satellite-missions/v-w-x-y-z/venus
[54]Cyril Cavel,Olivier Pronier,Pierre-Luc Georgy,et al.GEO-HR—requirements for maritime security &disaster management[R/OL].[2015-02-26].http://dup.esrin.esa.int/files/m300/GEO-HR_ProductProspectus_small.pdf
[55]Umberto Del Bello,Luca Massotti.ESA studies on HR imaging from geostationary satellites[R/OL].[2015-02-20].http://dup.esrin.esa.int/files/m300/02.pdf
[56]Schull U,Knigge T.Geo-Oculus:A mission for realtime monitoring through high resolution imaging from geostationary orbit[C]//EUMETSAT Meteorological Satellite Conference.Germany:EUMETSAT,2008
[57]Geo-Oculus:A mission for real-time monitoring through high resolution imaging from geostationary orbit[R/OL].[2015-12-26].http://emits.sso.esa.int/emits-doc/ESTEC/AO6598-RD2-Geo-Oculus-FinalReport.pdf
[58]M Aguirre,J-L Bézy.ESA activities related to high resolution imaging from GEO[R/OL].[2015-12-26].http://due.esrin.esa.int/files/GeoHR_2.pdf
[59]Africa-GeoSat1:A dedicated African geosationary imaging space system[R/OL].[2015-12-26].ftp://earthobservations.org/TEMP/2012-2015_WorkPlan/Rev1/2012-2015_WorkPlan_NewProposals/Africa% 20Geosat1.pdf
[60]EADS Astrium.GEO-Africa workshop[R/OL].[2015-02-26].http://www.earthobservations.org/documents/geo_africa/GEO-Africa-WhitePaper-Draft1-17Feb2010_1.PDF
(编辑:李多)
Global High-resolution Optical Satellite Overview(2):Europe
ZHU Renzhang1CONG Yuntian1,3WANG Hongfang2QIU Hui1,3BAI Zhaoguang2
(1Beijing University of Aeronautics and Astronautics,Beijing 100191,China)(2DFH Satellite Co.,Ltd.,Beijing 100094,China)(3China Academy of Space Technology,Beijing 100094,China)
Europe Space Agency and European countries such as France,England,Germany,Spain,Italy have developed high-resolution optical satellites and constellations.Among these satellites,Helios-2which is led by France can collect images of 0.35-meter spatial resolution(PAN)and be used mainly for military purposes.SPOT-6/7and Pleiades constellation developed by France,which can achieve 0.5-meter resolution,and DMC led by England which can achieve 1-meter resolution are main commercial remote sensing satellites.Sub-meter color video-imaging small satellite is under development.New concepts such as 6UCubeSat constellation and meter-class resolution geostationary optical satellites have been presented.Geostationary optical satellites are led by ESA,including conventional ones of 3-meter resolution and futuristic satellite(optical synthetic aperture)which plans to achieve resolution better than 3meter.In this paper,European high-resolution optical satellites are introduced,including their operations,technologies and trends.
European satellite;high resolution;optical satellite
V474.2
:ADOI:10.3969/j.issn.1673-8748.2016.01.015
2015-06-23;
:2015-10-20
朱仁璋,男,慕尼黑工业大学博士,北京航空航天大学教授。
猜你喜欢
家庭影院技术(2021年7期)2021-08-14 02:58:40
石油沥青(2021年1期)2021-04-13 01:31:08
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:18
家庭影院技术(2020年8期)2020-09-11 06:45:26
当代贵州(2019年41期)2019-12-13 09:28:56
收藏界(2019年4期)2019-10-14 00:31:10
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
中国共青团(2015年7期)2015-12-17 01:24:38
太空探索(2014年11期)2014-07-12 15:16:52
