
欧洲航天局月球着陆器概述及启示
2016-04-25 09:12:30朱汪
航天器工程 2016年1期
朱汪
(北京空间飞行器总体设计部,北京 100094)
欧洲航天局月球着陆器概述及启示
朱汪
(北京空间飞行器总体设计部,北京 100094)
月球南极位于太阳系中已知的最大撞击坑——爱特肯盆地的边缘,具有独特的科学探测价值,但鉴于多种原因至今尚无着陆器涉足。针对欧洲航天局月球南极着陆的长期论证结果,选取了最新的月球着陆器设计方案,介绍了整器构型和任务飞行过程,总结了光照与通信分析方法、障碍识别与规避和推进系统的实现方式;分析了月尘环境及等离子探测仪、月尘分析仪、月壤挥发物分析仪和可移动载荷等4种有效载荷的功能组成。最后提出了对我国月球探测的建议。
月球探测;月球南极;月球着陆器;欧洲航天局;障碍识别与规避
1 引言
20世纪90年代中期欧洲航天局(ESA)提出“月球探测任务验证方案”(Lunar Europenan Demonstration Approach,LEDA)和欧洲月球-2000计划(Euro Moon 2000)以来[1-2],始终把着陆点定位于月球南极。LEDA初选的着陆区位于南纬83°~85°,着陆下降段采用基于视觉的导航技术,同时须同位素热源进行热控。Euro Moon 2000是秉承美国航空航天局“较快、较省、较好”理念而提出的探月计划,尽可能采用现有技术,不追求系统最优,把风险最低、可行性最优放在第一位,确保任务成功。2002年正式启动的曙光计划(Aurora)拟定了ESA未来宇宙探索计划的初步框架,更加注重科学基础及技术水平持续性发展。2003年9月智能1号(SMART-1)成功实现绕月探测之后[3],着陆探测任务进一步明晰。随着日本月女神号(SELENE)和美国“月球勘测轨道器”(LRO)等绕月探测器逐步获取详细的南极遥测数据,ESA再次审视月球南极着陆计划[4],将着陆区进一步南移至南纬85°~90°,明确不采用核电源,更新了着陆下降段的导航和障碍识别与规避等技术,计划于2018年从法属圭亚那的库鲁发射场发射一个着陆器,实现世界首次月球南极软着陆探测。
本文对ESA月球着陆器的任务概况、关键技术及有效载荷等方面进行了介绍和分析,给出了月球南极着陆探测任务的特点及须解决的主要问题,并对有效载荷的选取提出了建议,可为我国后续月球探测任务提供参考。
2 着陆器概况
ESA月球着陆器仅含一个着陆器,拟搭载一个小型巡视车,无轨道器和返回器。截至2012年秋,主承包商德国Astrium公司在充分利用各国月球探测信息的基础上,对南极着陆的可行性进行了详细论证,完成了方案设计,并对关键单机进行了地面试验验证[5]。在同年11月举行的欧洲部长级会议上,考虑到运载火箭发展、地球观测、“国际空间站”和火星生物学(ExoMars)探测器等方面的资金需求,该任务未获得各成员国的一致支持而暂且搁置。但德国Astrium公司和西班牙GMV公司(负责着陆下降段制导与控制)仍在原有基础上继续开展相关研究工作[6]。下面从任务目标、整器构型和任务过程三个方面进行介绍。
2.1 任务目标
月球着陆器计划由ESA载人航天与操作理事会(Human Spaceflight and Operations Directorate)提出,旨在作为先导任务验证月球软着陆关键技术,为后续国际载人月球探测任务进行技术储备[5]。其主要任务目标包括:
(1)验证具有自主避障的安全、精确着陆技术,为未来载人登月奠定基础;
(2)通过月面观测与试验,更详细地了解月球环境;
(3)明确月球环境对未来机器人及载人月球探测活动的影响。
2.2 整器构型
着陆器发射质量约2500kg,月面着陆质量约750kg。如图1所示[7],着陆器整器高约3437mm,采用外径Φ2560mm的圆柱体构型,外壁四周为体装式太阳电池阵,外部对称安装4条着陆腿,内部为中央电子舱和燃料贮箱。着陆器的顶板上安装了各类有效载荷。着陆器的底板为5个主发动机和6个辅助发动机提供安装平台。着陆腿在发射段处于收拢状态,入轨后展开并在着陆器本体四周锁定。展开状态下的最大跨距为5600mm。
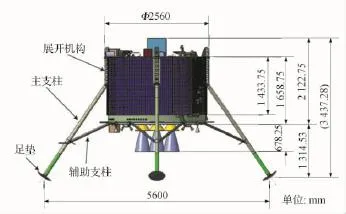
图1 ESA着陆器整器构型示意图Fig.1 Overview of ESA lunar lander
2.3 任务过程
ESA月球着陆器由“联盟”运载火箭发射,进入大椭圆地月转移轨道。飞抵月球后经近月制动进入100km/100km的极月圆轨道。在极月圆轨道上完成轨道相位调整、地月日指向调整和着陆器自检等。着陆下降过程分为下降段和着陆段,如图2和表1所示。其中,下降段又分为降轨段和主减速段;着陆段又分为着陆接近段和着陆冲击段。[8]

图2 ESA着陆器着陆下降过程Fig.2 Descent and landing strategy for ESA lunar lander
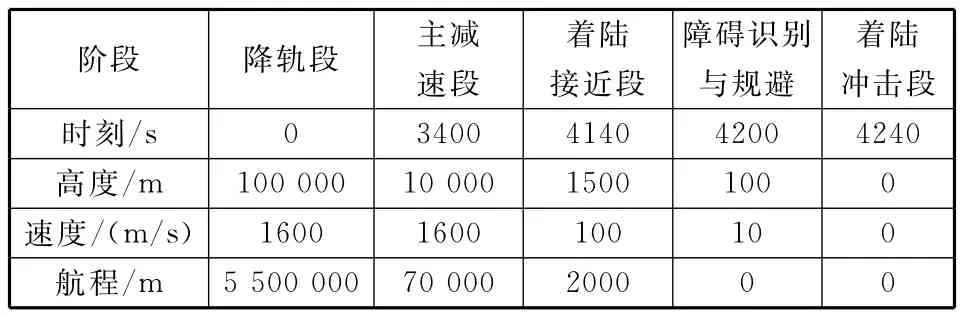
表1 着陆下降过程主要参数Table 1 Descent and landing timeline and phases
降轨段从降轨点火开始,到主减速段点火为止。轨道从100km/100km圆轨道变至100km/10km椭圆轨道。着陆器采用绝对光学导航,即由光学敏感相机对月面成像,经器上处理后提取出月貌特征形成的地标点,与器上数据库进行对比确定着陆器当前位置。
主减速段从距离月面高度约10km到约1.5km。此阶段中5台500N的主发动机同时点火工作,使得着陆器的速度由1.6km/s减小至约100m/s。着陆器采用相对光学导航,即在器上相机图像上对地标点进行跟踪,并通过导航敏感器计算获得着陆器速度,以确定着陆器与着陆点的相对位置。
着陆接近段从距离月面高度约1.5km到约100m。此阶段以燃耗较优模式精确控制下降过程,同时通过辅助发动机的脉冲工作模式对姿态偏差进行补偿,保证着陆器以预定轨迹下降。当着陆点进入着陆器视野范围内,着陆器对着陆区域进行扫描,自动识别坡度、障碍物和阴影区。若预定着陆点被识别为不安全,则避障系统自主寻找一个新的安全着陆点,并实施机动。
着陆冲击段从障碍识别与规避结束到着陆。足垫触月信号触发时关闭发动机,由4条着陆腿吸收着陆冲击能量。精确着陆要求相对于预定着陆点的偏差在±200m范围内。着陆器的第1个足垫接触月面时,按照3σ准则满足以下初始条件:①相对着陆面的水平速度为(0±1)m/s;②相对着陆面的竖直速度为(1.5±1)m/s;③相对竖直着陆姿态的三轴欧拉角为±2°;④姿态角速度±2.5(°)/s。
安全而稳定地着陆后,着陆器开展月面工作,主要包括:①展开有效载荷,建立与地面通信并对着陆点周边进行探测;②激活着陆器上的静态监视载荷,获取月球环境相关数据;③采样机构获取月壤并由着陆器上设备进行在位分析。
月面工作设计寿命为4~6个月。
3 关键技术
ESA月球着陆器以月球南极为着陆点,不采用核电源而主要依靠太阳能作为能源供应,无中继卫星作为地月通信的中转,且推进系统未采用变推力发动机。因此,必须综合考虑光照和对地直接通信的持续时间,并提供变推力发动机的替代方案。考虑到月球南极地形地貌复杂,区域高度落差大,制导导航与控制系统必须具有高精度的控制和自主避障能力。
在方案设计阶段,已完成导航系统及其各类敏感器核心功能验证、可脉冲调制的辅助发动机热试车和月夜生存相关的器上设备耐温能力及热控设计验证等关键硬件的功能性能试验。下面针对光照与通信分析、障碍识别与规避及推进系统进行详细介绍。
3.1 光照与通信分析
特定着陆区域的光照持续时间决定了月面操作时间及月夜生存需求。通信持续时间决定了测控与数传的工作时段,遥测遥控及数据传输策略。光照与通信分析过程如图3所示[9]。首先,根据日地月星历进行仅考虑空间几何关系的光照分析和地面站可见性分析,获得太阳及地面站的方位角和高度角。然后,结合飞行探测获得的月球数字等高模型(DEM),计算获得在考虑局部地形因素条件下,预选着陆区在一定时期内的累计光照和通信时间分布情况。最后,将光照与通信分析结果叠加合并,获得优选着陆区域的光照和通信分布图。
表2给出了月球南极典型着陆区光照与通信条件计算结果[9]。兼顾持续光照和通信时间,综合考虑着陆区面积和下降航迹中月面地形高程差等因素,可确定连接山脊为优选着陆区。

表2 典型着陆区光照与通信条件Table 2 Illumination conditions and ground station visibility at typical landing sites
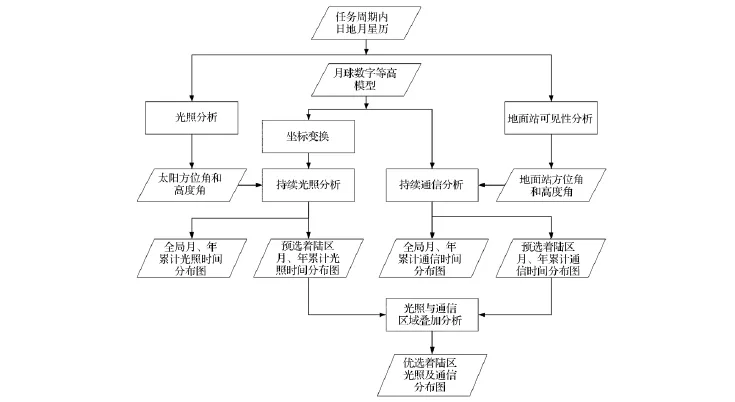
图3 光照与通信分析过程Fig.3 Flow chart of illumination and ground contact analysis
3.2 障碍识别与规避
1)地形特征识别
地形特征一般包括坡度、月坑和石块。平均平面是以着陆腿跨度与着陆时的控制偏差之和为基线(ESA着陆器的基线为10m),与当地地形偏差最小的拟合平面。平均坡度是平均平面相对于当地水平面的倾角。地形不平度是地形相对于平均平面的偏差。如图4所示[10]。着陆障碍是指可能影响着陆器安全着陆的地形特征。当前设计中,将坡度大于15°,或地形不平度大于500mm,或阴影区定义为着陆障碍区。
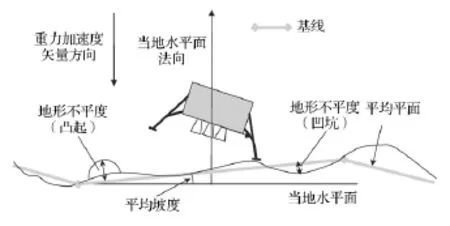
图4 地形特征示意图Fig.4 Schema of topography
地形识别包括2个步骤:首先对图像进行纹理过滤,标记出可能的障碍;然后通过明暗特征对比将月坑和石块区分开。坡度识别,是通过图像分析,采用立方卷积插值获得当地月面的平均坡度。或采用基于三角测量的不规则三角网法,计算获得坡度。
2)系统设计[11]
障碍识别与规避系统,由障碍图模块、可达性分析模块和重定向决策模块组成。
(1)障碍图模块:根据敏感器的探测数据,通过数据处理算法进行地形分析,确定潜在的坡度、不平度和阴影等障碍分布。并针对每一个像素点赋值标识障碍等级,最终获得目标区域的障碍综合评分图,作为安全着陆点选取的依据。
(2)可达性分析模块:根据敏感器获得的数据和数字等高图信息,计算备选着陆点和预定着陆点之间的距离,并确定由当前位置到备选着陆点所要消耗的燃料,以此确定备选着陆点是否可到达,同时给出各区域的可达性评分。
(3)重定向决策模块:根据障碍综合评分图和可达性评分图确定优选着陆点。系统仅在预定着陆点被确定为不安全,备选点明显优于预定点,且经过数次迭代都得到相同的着陆点时,才进行重定向机动。
3.3 推进系统
推进分系统为着陆器的姿态控制提供控制力矩,同时为其轨道控制和软着陆提供推力。主要包括以下3类推力器[5]:
(1)5台500N固定推力主发动机,安装于着陆器底板中心处,推力方向平行于着陆器的中心对称轴。主减速段开始后,以全推力工作,使得着陆器的速度迅速减小;进入着陆接近段之后,逐渐关闭以减小总输出推力。
(2)6台220N的脉冲式辅助发动机,安装于主发动机的周围,推力方向与主发动机一致。一方面可辅助主发动机提供更大的总输出推力,同时通过脉冲调制法实现总输出推力的变化,另一方面用于整器的俯仰和滚转机动。
(3)16台22N的脉冲式姿态控制推力器,安装在整器的不同位置,用于控制三轴姿态。
27台推力器采用同一套推进剂系统,面临主发动机关机,辅助发动机脉冲调制和推力波动等问题,对推进剂的输送与管理提出了挑战。主辅发动机相互之间距离很近,必须解决各台发动机之间的液压串扰和热冲击问题。尽管在储箱设计时,会采取一定的防止晃动措施,但控制系统还是必须考虑到晃液动力学带来的重要影响,避免脉冲式辅助发动机的脉冲调制频率与推进剂晃动基频耦合。
4 有效载荷
围绕主要任务目标,在实现精确着陆的基础上,着陆器将通过各种有效载荷对月面环境进行详细探测,为后续任务奠定基础。下面介绍4种典型设备。
4.1 月尘环境及等离子探测仪
月尘环境及等离子探测仪(L-DEPP),用于探测月球表面月尘带电、悬浮和移动特性,等离子体的温度和密度以及电场强度,同时观测射频频谱,为未来射电天文学探测做准备。一种典型布局如图5所示[7]。

图5 月尘环境及等离子探测仪的一种典型布局Fig.5 Typical layout of lunar dust environment and plasma package
月尘传感器通过电荷感应原理测量月球颗粒的带电量、速度及轨迹。郎缪尔传感器用于测量冷等离子体以及电子层的电场、温度和密度。射频天线通过跟踪月表的已知离子获得月表电子层和等离子体的特性,并获取着陆点月表的长波电离特性。
4.2 月尘分析仪
月尘分析仪(L-DAP),用于月尘及月壤的月面原位显微观测及成分分析,如图6所示[7]。原子力显微镜和样品台继承自美国的凤凰号(Phoenix)探测器,光学显微镜继承自猎兔犬2号(Beagle 2)。拉曼光谱仪和激光诱导击穿光谱仪继承自“火星生物学”(ExoMars)计划。

图6 月尘分析仪示意图Fig.6 Lunar dust analysis package
4.3 月壤挥发物分析仪
月壤挥发物分析仪(L-VRAP),用于分析月表挥发物种类、含量与分布,如图7所示[7]。采样系统获得的月壤样品,被放入封闭容器中,加热至1200℃;由质谱仪对挥发气体进行成分分析,确定其元素种类、同位素和相对丰度。此设备主要继承自猎兔犬2号的气体分析仪和罗塞塔(Rosetta)探测器的托勒密仪。
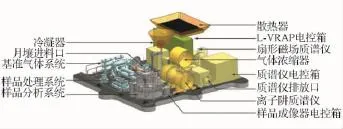
图7 月壤挥发物分析仪示意图Fig.7 Lunar volatile resources analysis package
4.4 可移动载荷
可移动载荷(MPE)由德国航天局研制,如图8所示[12]。作为月面移动、遥操作和自主巡视等技术的验证平台,能够在着陆点附近100m范围内5个不同地点,从月表、浅表及阴影区采集月壤样品,并完全自主地带回着陆器,供仪器分析。设计工作寿命约6~9个月,以在第一个连续光照期完成所有主要任务为目标。
可移动载荷收拢状态下尺寸为660mm× 450mm×315mm,展开状态下为990mm× 450mm×740mm。总质量13.78kg,包括4轮式小型巡视车11.841kg,立体相机0.305kg,采样装置1.218kg和近景成像器0.416kg。巡视车采用主动悬架系统,能够收拢后存放于着陆器内。立体相机安装于巡视车前端,视场角为120°,有效像素为1024×1024。采样装置结构组成如图9所示,安装于巡视车图示顶面左侧,由猎兔犬2号的钻采设备改进而来。具有重量轻、耗能小、对基座的反作用力小等优点,可实现月表和浅表采样。近景成像器安装于巡视车后端,继承自菲莱(Philae)着陆器的ROLIS近景相机。

图8 可移动载荷示意图Fig.8 Mobile payload element
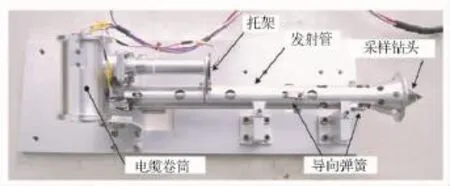
图9 采样装置示意图Fig.9 Sampling device
能源供应采用总输出功率约25W的太阳电池阵加总能量160Wh的蓄电池组。其中,太阳电池阵包括2块体装式固定板和2块可展开板。热控系统采用主动与被动相结合的方式,能够保证可移动载荷在阴影区工作2h,或休眠14h。
巡视车采用立体相机,结合LED闪光灯、转向轮、编码器和倾角计,通过融合里程表和视觉伺服信息来定位,并采用立体图像匹配实现避障与路径规划。巡视车与着陆器之间有两条通信链路。UHF频段为遥测遥控双向通信,带宽9.6kbit/s。S频段为巡视车至着陆器的单向科学数据和导航数据传输链路,带宽512kbit/s。着陆器与地面之间采用X频段进行所有巡视车相关数据的双向通信。遥操作模式下,巡视车以固定时间间隔向地面发回状态更新量。在计入指令传输时间、操作员决策时间以及停下来给电池充电时间的情况下,有效移动速度约为5mm/s。自主移动模式下,巡视车自主导航系统建立当地地图,通过已知地标点确定当前位置,然后进行路径规划,并产生运动指令序列。此模式由地面操作员触发,有效移动速度约7mm/s。在某些应急条件下,例如连续多次通信延迟等,将由程序触发转入自主安全模式,避免给巡视车带来危险。
5 启示
(1)月球南极着陆探测机遇与挑战并存,建议我国尽早开展可行性论证。月球南极至今尚无着陆器涉足,因可能存在水冰以及独特的科学价值,日益成为月球探测热点之一[13]。ESA进行了长期论证,鉴于多种原因至今尚未有效实施。若我国以月球南极作为下一阶段着陆探测的目标并能成功实现,必将在科学探测中占得先机,并进一步有效提升我国在深空探测领域的国际影响力。建议在论证过程中,结合任务特点,考虑与现有探测任务的衔接性,巩固现有技术,牵引新技术,在探测深度、广度或任务周期上,体现特点。
(2)着陆探测月球南极,须获得准确的地形及光照分布数据,并掌握自主避障的精确着陆技术。月球南极海拔高,落差大,山崖陡峭,满足准连续光照条件的区域在几百米量级,对着陆精度和障碍识别与规避提出了很高的要求。作为输入条件的月球南极地形,ESA同时采用月球勘测轨道器(LRO)和月女神号(SELENE)两家数据源,并参考其它探测器数据;在光照与通信分析方面,同时由3家机构独立开展研究,并将分析结果进行对比。以此为预定着陆点提供更为准确的信息。自LEDA计划至后来的曙光计划(Aurora),ESA针对障碍识别与规避开展了十余年的研究,并在本文所述的着陆器计划中完成了详细的仿真与半物理仿真验证。建议我国在探月工程已有月球探测数据和飞行经验的基础上,结合国外探测数据,先期启动月球南极着陆区分析与筛选,并探讨利用现有在轨资源进行月球南极潜在着陆区高精度遥感探测的可能性。同时,进一步提高制导导航控制系统自主避障能力,为月球南极着陆探测奠定基础。
(3)有效载荷的选取遵循继承与创新相结合的原则,并尝试谋求国际合作。ESA着陆器在月表环境探测、月尘分析和月壤钻采等方面,充分继承现有技术,直接借用凤凰号、猎兔犬2号和罗塞塔等探测器任务中的有效载荷组件或进行适应性改进。在月面巡视探测方面,提出了一种小型自主巡视车,实现了在一次飞行任务中对月面巡视与月壤采集等多项技术的验证。巡视车采用一套悬架机构实现了收拢、展开、巡视与在位采样等多个运动需求。建议我国根据科学任务需求,从国内、国际各类探测任务中,遴选已有成功应用的有效载荷,在确保基本科学目标实现的前提下,尽可能提高设备探测能力。同时,考虑在一定范围内对新型有效载荷进行在轨验证,以牵引相关领域技术发展,而具备一定移动能力的小型化采样巡视车提供了一种思路。
(References)
[1]Kassing D,Novara M.Technical challenges of the LEDA mission,IAF-95-Q.1.10[C]//46th Internaltional Astronautical Congress.Paris:IAF,1995
[2]Novara M,Kassing D.The LEDA mission:exploration opportunities prompted by a return to the moon[J].Advanced Space Research,1997,19(10):1629-1635
[3]陈俊勇.月球地形测绘和月球大地测量(4)[J].测绘科学,2004,29(5):7-11 Chen Junyong.Topography surverying and geodesy on the moon(4)[J].Science of Surveying and Mapping,2004,29(5):7-11(in Chinese)
[4]Wikipedia.Lunar lander(space mission)[EB/OL].[2014-10-08].http://en.wikipedia.org/wiki/lunar_lander_(space_mission)
[5]Fisackerly R,Pradier A,Gardini B,et al.The ESA lunar lander mission,AIAA 2011-7217[C]//AIAA SPACE 2011Conference &Exposition.Washington D.C.:AIAA,2011
[6]Clark S.ESA lunar lander shelved ahead of budget conference[EB/OL].[2014-10-8].http://www.spaceflightnow.com/news/n1211/20moonlander/
[7]Carpenter J D,Fisackerly R,Rosa D D,et al.Scientific preparations for lunar exploration with the European lunar lander[J].Planetary and Space Science,2012,74(1):208-223
[8]Kerr M L,Hagenfeldt M,Ospina J A,et al.ESA lunar lander:approach phase concept and G&C performance,AIAA 2013-5018[C]//AIAA Guidance,Navigation,and Control(GNC)Conference.Washington D.C.:AIAA,2013
[9]Koebel D,Bonerba M,Behrenwaldt D,et al.Analysis of landing site attributes for future missions targeting the rim of the lunar South Pole Aitken basin[J].Acta Astronautica,2012,80(6):197-215
[10]Rosa D D,Bussey B,Cahill J T,et al.Characterisation of potential landing sites for the European Space Agency’s lunar lander project[J].Planetary and Space Science,2012,74(1):224-246
[11]Parreira B,Vasconcelos J F,Montao J,et al.Hazard detection and avoidance in ESA lunar lander:concept and performance,AIAA 2013-5020[C]//AIAA Guidance,Navigation,and Control(GNC)Conference.Washington D.C.:AIAA,2013
[12]Haarmann R,Jaumann R,Claasen F,et al.Mobile Payload Element(MPE):concept study for a sample fetching rover for the ESA lunar lander mission[J].Planetary and Space Science,2012,74(1):283-295
[13]李飞,张熇,吴学英,等.月球南极着陆器关键特性分析[J].航天器工程,2015,24(1):103-110 Li Fei,Zhang He,Wu Xueying,et al.Analysis of key characteristics of lunar south pole for landing[J].Spacecraft Engineering,2015,24(1):103-110(in Chinese)
(编辑:张小琳)
Overview and Enlightenment of ESA Lunar Lander
ZHU Wang
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Located at the rim of the Aitken Basin,being the largest known impact crater in the solar system,the lunar south polar region is of special scientific value.Owing to plenty of reasons,so far no lander has landed there.The paper traces the persistent investigation of European Space Agency on the lunar south pole landing and puts emphasis on the most rencent design concept.It introduces the lander configuration and mission scenario.And summarizes analytical method of illumination and communication and realization mode of hazard detection and avoidance as well as propulsion.The paper also demonstrates the constitution of four typical payloads:lunar dust environment and plasma package,lunar dust analysis package,lunar volatile resources analysis package and mobile payload element.It proposes the following enlightenment:firstly,as opportunity is a companion of challenge in landing at the lunar south pole,it is suggested to carry out feasibility demonstration in time;secondly,for landing in the south pole,exact topography and illumination information and precise soft-landing technologies are compulsory.
lunar exploration;lunar south pole;lunar lander;ESA;hazard detection and avoidance
V476.3
:ADOI:10.3969/j.issn.1673-8748.2016.01.017
2015-02-24;
:2016-01-06
国家重大科技专项工程
朱汪,男,高级工程师,研究方向为航天器机构设计与分析。Email:juwong@china.com.cn。
猜你喜欢
英语世界(2022年5期)2022-05-18 12:14:16
空间科学学报(2021年2期)2021-07-21 08:43:38
小哥白尼(趣味科学)(2020年12期)2021-01-18 06:15:24
小哥白尼(神奇星球)(2020年12期)2021-01-18 05:36:06
航天器工程(2019年4期)2019-11-11 03:41:00
学生天地(2019年32期)2019-08-25 08:55:20
伙伴(2019年12期)2019-01-17 04:38:56
红领巾·探索(2018年12期)2018-01-26 12:34:14
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
深空探测学报(2016年4期)2017-01-18 06:15:03
