
月地高速再入返回航天器时统设计及验证
2016-04-25 09:12金晟毅白崇延张伍黄昊李溟
航天器工程 2016年1期
金晟毅 白崇延 张伍 黄昊 李溟
(北京空间飞行器总体设计部,北京 100094)
月地高速再入返回航天器时统设计及验证
金晟毅 白崇延 张伍 黄昊 李溟
(北京空间飞行器总体设计部,北京 100094)
月地再入返回航天器在第二宇宙速度下实现服务舱和返回器分离,返回器以半弹道跳跃方式准确地再入并着陆在预定回收区,为了保证返回器的导航精度,对返回航天器的时间精度有一定的要求。为此,文章提出适用于二级信息拓扑结构的多舱段航天器的器上时间维护系统(简称“时统”)和相应的地面验证系统设计。通过理论分析和地面验证试验,并结合月地高速再入返回航天器真实在轨飞行数据分析,证明此时统设计能够在较长时间内使月地再入返回航天器的器上时间精度保持在较高的水平。
月地高速再入返回航天器;器上时间维护系统;二级信息拓扑结构
1 引言
我国月地高速再入返回航天器(简称“返回航天器”)是由服务舱和返回器组成的两舱段结构航天器,主要用于对半弹道跳跃式再入返回的关键技术进行验证,获取试验数据。返回航天器经历发射入轨、月地转移、近旁转向、地月转移后,在距离地面5000km高度处以接近第二宇宙速度实现服务舱与返回器分离,返回器以半弹道跳跃方式返回预定的回收区。为了提高返回器再入返回的初始制导精度,使返回器返回的再入航程和落点精度满足任务要求,要确保航天器在执行任务期间,尤其是服务舱与返回器在包括分离时刻在内的整个分离过程中器上时间与地面标准时间误差不大于5ms。
目前,对于单舱或多舱段航天器,国内外采用的较为普遍方法是在航天器上设置一个独立的高稳时钟频率源,器上计算机获取时钟频率源信号进行累加计数,计算和维护器上时间,并定期将维护的器上时间转发或广播给有时间维护系统(简称“时统”)精度要求的航天器设备[1-3]。返回航天器由于系统资源以及测控可见弧段限制,无法在2个舱段上均配置高稳时钟频率源,并且在某些关键任务节点前的较长一段时间内,地面测控系统不能对返回航天器进行时间校准操作,这样会导致在该任务节点处部分的器上设备无法获取高精度的时间信息,使返回器的制导精度下降。为此,本文提出针对此类组合体结构航天器的时统设计方法,可有效抑制由于系统资源限制造成的时间误差,确保返回航天器上设备能够获得高精度的时间信息。通过理论分析和返回航天器真实在轨飞行数据分析,证明了本文提出时统设计方法的有效性。
2 时统设计及分析
2.1 时统设计
返回航天器受到系统资源限制,以及在飞行过程中可能遇到较长不可见测控弧段的情况,因此不能依赖地面直接对有时间精度需求的器上设备进行频繁的时间校准操作。为此,本文设计二级信息拓扑结构模型,模型中仅中心节点能够通过测控系统与外部(或地面)进行信息交互,并在较长时间段内维护返回航天器的器上时间,使之保持在较高的精度水平之上。中心节点还能够将获取得外部信息和自身维护的时间数据,分发给下一级的设备并进行时间同步。这里构建通用的具有二级信息拓扑结构的多舱段结构航天器的时统结构,如图1所示。

图1 时统结构Fig.1 Time-synchronization system structure
时统结构具有以下特点:
(1)舱段Ⅰ配置有独立的高稳时钟源,并且能够直接与地面进行通信;
(2)舱段Ⅱ,Ⅲ,…,N上的设备不能与地面直接进行通信,要通过自身计算机和舱段Ⅰ的计算机进行中转;
(3)舱段Ⅱ的计算机可使用内部非高稳时钟源进行本地时间计数,通过与舱段Ⅰ的计算机之间进行时间同步,从而保持与舱段Ⅰ相近的时间精度;
(4)舱段Ⅱ,Ⅲ,…,N上的时间接收设备,与本舱段的计算机进行时间同步;
(5)须要保证舱段Ⅱ,Ⅲ,…,N上的时间接收设备的时间精度要求。
根据时统结构设计,舱段Ⅰ可视为返回航天器的服务舱,舱段Ⅱ可视为返回航天器的返回器。服务舱和返回器未分离前,由于测控信道的限制,地面只能与服务舱进行数据通信。对时间有较高的精度需求的返回器的时间接收设备,只能通过返回器的计算机与服务舱的计算机间接与地面进行通信。基于这种情况,将服务舱计算机作为返回航天器的时统维护核心,并配置较高稳定度的频率源输入信号。地面通过返回航天器与地面的遥测通道,接收服务舱计算机维护的时间遥测,并与地面标准时间进行比对,若有偏差,则遥控通道发送时间校准指令,将服务舱计算机维护的时间与地面标准时间同步。服务舱计算机周期性(60s)地将维护的时间广播给返回器计算机,使返回器计算机时间与服务舱计算机时间同步。返回器计算机周期性(30s)地将维护的时间广播给返回器时间接收设备,使返回器时间接收设备时间与返回器计算机时间同步。这样,系统以地面同步服务舱计算机→服务舱计算机同步返回器计算机→返回器计算机同步返回器时间接收设备的方式,确保返回器时间接收设备的时间满足精度要求。
2.2 理论分析
为了分析返回器时间接收设备维护的时间TF-RSTR与地面标准时间TG之间的误差传递关系,定义TF-RSC为返回器计算机维护的时间,TG-OSC为服务舱计算机维护的时间。返回器时间接收设备要与返回器计算机进行时间同步,TF-RSTR与TF-RSC之间的关系见式(1)。

式中:ΔTF-ComDelay为返回器计算机在向返回器时间接收设备同步时间的过程中由软件和通信产生的时延;ΔTQ为同步时间的最小量化分层;ΔTDelay-RSTR为返回器时间接收设备内部的软件和中断响应时延。
返回器计算机需要与服务舱计算机进行时间同步,TF-RSC与TG-OSC之间的关系见式(2)。

式中:ΔTG-ComDelay为服务舱计算机在向返回器计算机同步时间的过程中由软件和通信产生的延时;ΔTDelay-RSC为返回器计算机内部的软件和中断响应延时;ΔTOSC-60s为返回器计算机2次接收服务舱计算机时间同步过程中由于返回器的晶振漂移导致的计时误差,根据返回器使用的器件特性,该值低于3×10-4s。
地面需要与服务舱计算机进行时间同步,TG与TG-OSC之间的关系见式(3)。


式中:TO-TMM,TO-G,TG-TMD分别为返回航天器上遥测的调制时间、返回航天器与地面之间通信信号的传输时间和地面遥测的解调时间,其中,TO-TMM和TG-TMD要通过地面测量获得,TO-G可通过测定轨后获得;ΔTMeasure可认为是测量TO-TMM,TG-TMD,TO-G时产生的测量误差;ΔTDatum-dev为给定的初始时刻返回航天器的器上时间与地面时间的初始基准误差。
将式(1)+式(2)+式(3)后得
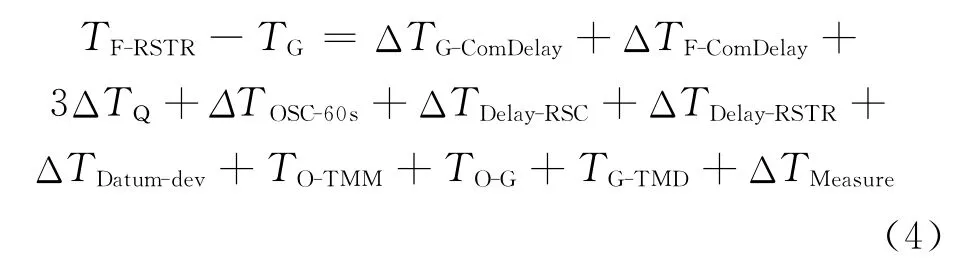
ΔTG-ComDelay,ΔTF-ComDelay,ΔTDelay-RSC,ΔTDelay-RSTR作为设备内部及设备之间的通信和软硬件延时,最大的扰动误差一般在1×10-6s内,因此取最大的扰动误差为1×10-4s。由于时间的最小分层为1× 10-3s,将时间向下取整,再补加5×10-4s进行修正,得到ΔTQ为5×10-4s。ΔTMeasure与ΔTDatum-dev合并后的最大值为1×10-3s。将上述数值代入式(4)可得

式中:固定量C=TO-TMM+TO-G+TG-TMD,可进行补偿。
整理可得

对式(6)进行固定量C补偿,则TF-RSTR相对于TG的最大误差量为2.9×10-3s。因此,经过理论分析,本文的时统设计能够保证返回器时间接收设备的时间与地面标准时间之间的误差在2.9ms以内,优于返回航天器分解指标5ms的要求。
3 地面验证系统设计及时统设计验证
为了确保返回航天器在轨任务的顺利完成,设计地面验证系统检查返回器时间接收设备与标准时间(GPS时间)之间的误差关系[4-7],从而验证时统设计的可行性和正确性。地面验证系统的示意如图2所示,图中T1~T10的说明见表1。
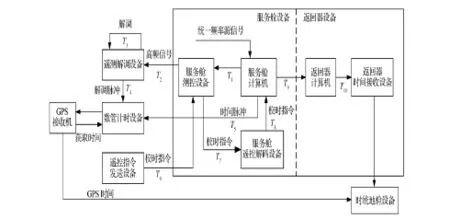
图2 地面验证系统Fig.2 Ground verification system
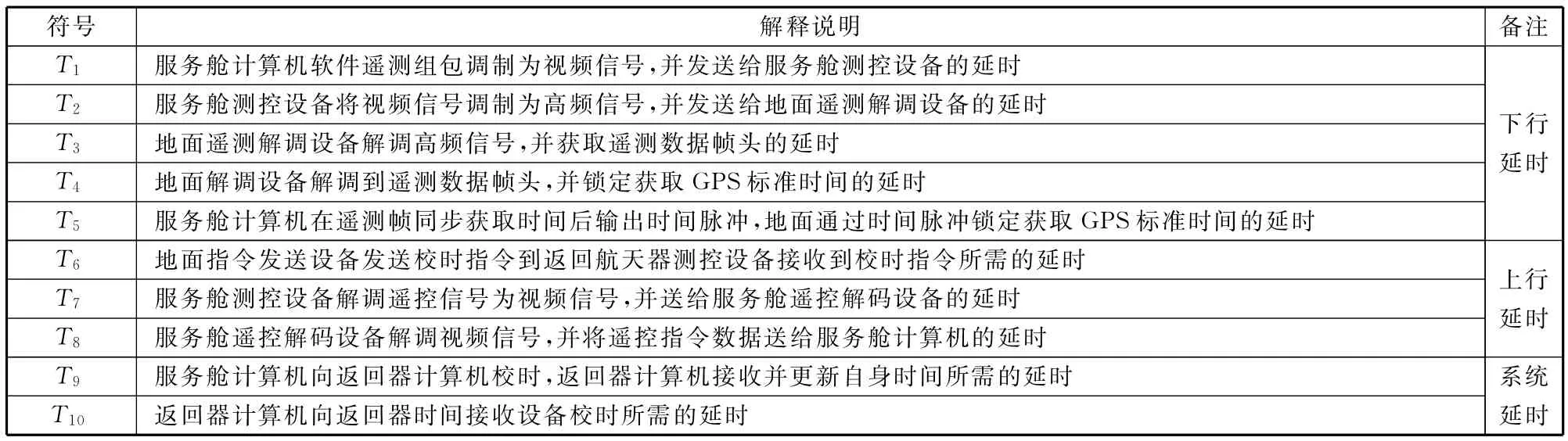
表1 图2中T1~T10的说明Table 1 Specifications of T1~T10marks in Fig.2
使用地面验证系统测量返回器时间接收设备时间与标准时间之间的误差,验证试验步骤如下[8-9]。
步骤1:使用地面验证系统采集T3和T4,做差后测量返回航天器与地面的链路时延TO-G-Link;
步骤2:使用地面验证系统采集T4,并从遥测中解析出T5获得返回航天器上系统与地面标准时间的时间差;
步骤3:对服务舱计算机进行校时,使之与地面标准时间同步;
步骤4:使用时统地检设备获取返回器时间接收设备时间与标准时间的比较结果,并进行误差分析。
可以认为,TO-G-Link=T1+T2+T3+T4-T5,与系统固有设计相关,是一个固定值。在不同的遥测编码方式及码速率模式下,多次测量后的统计结果,参见表2。
步骤2的目的是为了测量返回航天器时间与标准时间的基准偏差,参考式(4)得

TO-G在地面验证时取为0,TO-G-Link=TO-TMM+TG-TMD,所以有

式(8)中,ΔTMeasure和TG-OSC-TG为微秒量级,可忽略。通过ΔTDatum-dev≈TO-G-Link+ΔTQ计算ΔTDatum-dev,并将计算结果编制为校时遥控指令,对服务舱计算机进行校时。
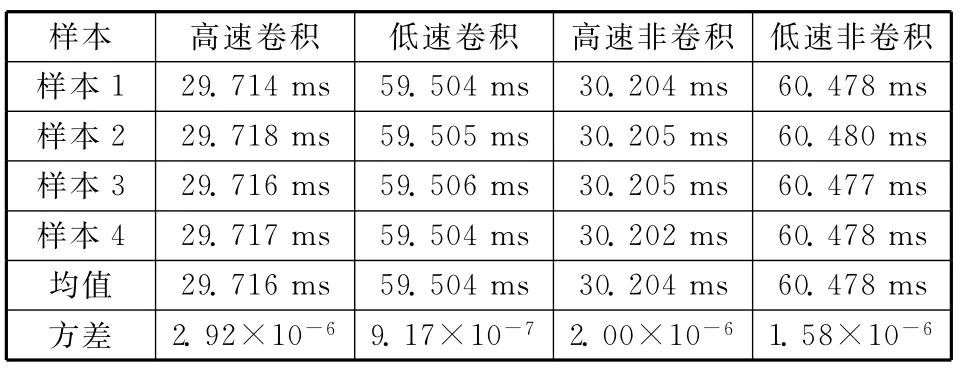
表2 不同遥测模式下的延时测量结果Table 2 Measuring results of time delay in different telemetery modes
从时统地检设备上获取TF-RSTR(t)和TG(t)的时间曲线,绘制时间误差y=TF-RSTR(t)-TG(t)曲线如图3所示。图3中时间误差区间为[1.65ms,-0.42ms],由此可知,时统最大测量误差为2.07ms,满足任务使用要求。对误差曲线求导,获得误差变化范围为[-1.380ms,1.389ms],取最大值1.389ms为最差影响分析参数。

图3 返回器时间接收设备时间与标准时间误差Fig.3 Deviation between RSTR’s time and standard time
4 在轨数据分析
返回航天器发射入轨后,由于使用条件所限,无法直接从返回器时间接收设备处获取时间信息,进行误差判断。考虑到TF-RSTR-TG≈TG-OSC-TG+(TF-RSTR-TG-OSC),将式(1)+(2)后可得

由式(9)可得,TF-RSTR-TG-OSC≤1.034×10-4s+1.389×0.667×10-3s+4.2×10-7s≈1.03× 10-3s,因此有

通过对服务舱计算机下传的遥测数据进行分析,可以获得y=T′G-OSC(t)-TG(t)曲线,见图4。对获得的曲线取一阶微分,即dy=d(T′G-OSC(t)-TG(t))/dt,获得服务舱遥测与地面标准时间的误差变化最大值为2×10-3s,多数变化集中在[-1× 10-3s,0]之间。
对图4中的曲线进行拟合(见图5),拟合的直线斜率为-1×10-4ms/s,拟合直线初始截距为0.5ms。可以看出,在该时间段内,服务舱计算机平均每2.77h偏移1ms,系统的初始基准误差为0.5ms。
为了消除时间漂移造成的时间精度损失,使用服务舱计算机均匀校时功能,使计算机每计时10 000s,拨快1ms后,在轨数据积累50 000s,其y=T′G-OSC(t)-TG(t)曲线见图6(均匀校时后)。
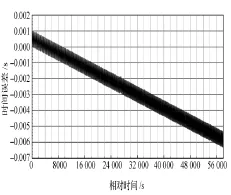
图4 在轨遥测时间与标准时间之差(无均匀校时)Fig.4 Deviation between on-orbit telemetery time and standard time without uniformity time correction

图5 在轨遥测数据线性拟合结果Fig.5 Linearization results of on-orbit telemetery data
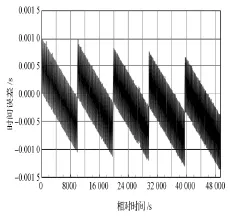
图6 在轨遥测时间与标准时间之差(均匀校时后)Fig.6 Deviation between on-orbit telemetery time and standard time after uniformity time correction
对图6中的毛刺进行滤除后,误差曲线范围为[-1.45ms,0.87ms]。取其中最大误差1.45ms代入式(10),可得50 000s(13h53min20s)内TF-RSTR-TG≤2.48×10-3s,该数据表明,返回航天器在轨期间,地面测控系统每12h进行1次地面校时操作,即可将返回航天器上时间与地面标准时间之间的误差控制在2.48ms之内,满足任务要求(误差小于5ms),可有效支持任务顺利完成。
5 结束语
本文提出返回航天器时统设计和相应的地面验证系统设计。理论分析结果与地面验证结果进行比对表明:地面验证系统能够验证时统设计的性能,证明返回航天器时统设计可满足不大于3ms的精度要求。通过在轨数据分析进一步证明了此设计的正确性。本文提出的设计及其验证方法,能用于多舱段、由顶至底的单向二级总线信息拓扑结构的航天器,可使此类航天器获得相近的时统维护性能。
(References)
[1]Wu Haitao,Li Xiaohui,Bian Yujing.Independent UTC synchronization and time code transmission over LORAN-C data channel[C]//Proceedings of the IEEE 2002International Frequency Control Symposium.New York:IEEE,2002:156-183
[2]赵当丽,胡永辉.关于“长河二号”导航系统的时间同步及授时[J].时间频率学报,2003,26(1):61-68 Zhao Dangli,Hu Yonghui.On time synchronization and time service with“Changhe 2”navigation system[J].Journal of Time and Frequency,2003,26(1):61-68(in Chinese)
[3]吴海涛.罗兰C自主授时及其数据通信的研究[D].北京:中国科学院研究生院,2002 Wu Haitao.Study on the independent time service and data communication over Loran-C[D].Beijing:Graduate School of CAS,2002(in Chinese)
[4]向为,徐博,牟卫华,等.基于锁相环的GNSS授时接收机钟差校准算法[J].国防科技大学学报,2013,35(2):41-45 Xiang Wei,Xu Bo,Mou Weihua,et al.A clock error calibration algorithm based on phase lock loop in GNSS time synchronization receiver[J].Journal of National University of Defense Technology,2013,35(2):41-45(in Chinese)
[5]吴军高.基于卫星的高精度时间测量[C]//全国频率控制技术2008年会论文集.北京:中国宇航学会,2008:17-21 Wu Jungao.Precise time measuring based on satellite[C]//Proceedings of 2008Conference of China Frequency Control Technology.Beijing:Chinese Society of Astronautics,2008:17-21(in Chinese)
[6]柯熙政,刘娟花,李建勋.多模式组合定时设备设计与研制[J].仪器仪表学报,2013,34(6):1209-1217 Ke Xizheng,Liu Juanhua,Li Jianxun.Design &development of multi-mode integrated timing device[J].Chinese Journal of Scientific Instrument,2013,34(6):1209-1217(in Chinese)
[7]国防科工委.GJB 2242-94 时统设备通用规范[S].北京:国防科工委军标出版发行部,1994 The Commission of Science,Technology and Industry for National Defense.GJB 2242-94General specification for timing equipments[S].Beijing:The Commission of Science,Technology and Industry for National Defense GJB-press Circulation Department,1994(in Chinese)
[8]章宝润.时间统一系统[M].北京:国防工业出版社,2003 Zhang Baorun.Timing system[M].Beijing:National Defense Industry Press,2003(in Chinese)
[9]任宏,王志林,罗纯哲.时统对时精度测量设备的设计与研究[J].电子技术应用,2009,35(10):127-130 Ren Hong,Wang Zhilin,Luo Chunzhe.The design and study of time precision measure equipment of the IRIC-B code time system[J].Application of Electronic Technique,2009,35(10):127-130(in Chinese)
(编辑:夏光)
Time-synchronization System Design and Verification for Moon-earth High-speed Reentry Spacecraft
JIN Shengyi BAI Chongyan ZHANG Wu HUANG Hao LI Ming
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
The moon-earth high-speed reentry spacecraft needs to implement the separation of compartments at a near second cosmic velocity.The reentry-capsule will accurately land at a predicted recovery zone in a half-trajectory jump mode.In order to ensure the navigation accuracy of the reentry-capsule,a certain accuracy of onboard time is required.This paper introduces a design of onboard time-synchronization system and corresponding ground verifcation system.The onboard time-synchronization system is designed to apply to the topological structure of the twolevel information of multicabin spacecraft.Through theoretical analysis,ground verification test and on-orbit data,the correctness of time-synchronization system design is validated,which shows the time accuracy onboard can be maintained at a higher level over a long time.
moon-earth high-speed reentry spacecraft;onboard time-synchronization system;twolevel information topological structure
V476.3
:ADOI:10.3969/j.issn.1673-8748.2016.01.013
2015-01-09;
:2015-10-14
国家重大科技专项工程
金晟毅,男,工程师,研究方向为深空探测总体设计。Email:shengyi_jin@hotmail.com。
猜你喜欢
国际太空(2022年7期)2022-08-16
太空探索(2022年3期)2022-03-28
一重技术(2021年5期)2022-01-18
国际太空(2021年8期)2021-11-05
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
航天器工程(2018年4期)2018-09-15
电子制作(2018年11期)2018-08-04
舰船科学技术(2018年7期)2018-07-25
