
基于Proximity-1协议的星间测距与时间同步技术研究
2016-04-25 09:12申景诗左莉华贺瑞康旭辉
航天器工程 2016年1期
申景诗左莉华贺瑞康旭辉
(1山东航天电子技术研究所,山东烟台 264670)(2航天东方红卫星有限公司,北京 100094)
基于Proximity-1协议的星间测距与时间同步技术研究
申景诗1左莉华2贺瑞1康旭辉1
(1山东航天电子技术研究所,山东烟台 264670)(2航天东方红卫星有限公司,北京 100094)
卫星之间信息交互、星间相对测距及时间同步是卫星星座与编队卫星飞行任务的关键技术。文章利用空间数据系统咨询委员会(CCSDS)Proximity-1协议中给出的时间业务,提出了一种非相干双向测距/时间同步方法,在星间信息传输的同时完成星间高精度测距,并详细给出了算法的计算公式推导和模型误差分析,理论分析和实验仿真结果表明:文章提出的方法具有较高的测距/时间同步精度,且功能集成度高,可为星间链路的建设提供技术支持。
Proximity-1协议;星间通信;非相干测距;时间同步
1 引言
为实现空间目标的精确测量、准确跟踪、全空域覆盖、实时操控,以及提高测控系统的生存能力,卫星星座[1-2]与编队卫星飞行技术[3-5]已成为当前研究的重点。星座以及编队中各卫星之间的协同控制、自主运行的重要前提是,实现星间相对测距和时间同步并建立信息交互链路[6]。
星间测距和时间同步的传统方式是利用地面设备对卫星星座进行测量,存在成本高、同步精度低、设备复杂等问题。利用星间链路进行星间相对自主测量可以使卫星无须依赖地面测控设备,仅依靠自身跟踪与测量设备完成测距和时间同步以及信息的交互。这样可以减轻地面的工作负担,同时还能有效避免大气层引入的测量误差,有利于提高测量精度。
CCSDS Proximity-1协议是CCSDS开发的一个应用于空间任务的双向空间链路协议[7-9],充分考虑了近距链路具有的信号延迟小、强度适中、通信时间短且不受约束等特点,为建立一个稳定可靠的空间传输链路提供了一种实现手段。CCSDS Proximity-1协议的时间业务能完成星间时钟的传递,进而实现时差相对测距、时钟校准。
本文针对CCSDS Proximity-1协议中提供的时间业务展开研究,重点是主星和从星之间时间校准和双星之间时差相对测距的实现方法。参考CCSDS Proximity-1协议提供的非相干时差测距方法,在星间信息传输的同时实现星间高精度测距。并在指定的信号体制和时钟稳定度条件下,优化电文的设计、捕获、跟踪算法设计,尽可能提高测距精度。
2 CCSDS Proximity-1协议
CCSDS Proximity-1协议支持多种空间数据在各种近距离空间链路上的有效可靠传递。其分层模型由两层组成,分别是物理层和数据链路层,其中数据链路层又分为五个子层,即编码和同步子层、传输帧子层、介质访问控制(Media Access Control,MAC)子层、数据业务子层和输入输出子层。各层的主要功能如图1所示[10]。
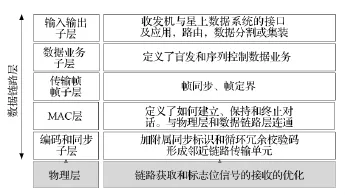
图1 Proximity-1协议分层结构功能示意图Fig.1 Schematic of hierarchical structure of proximity-1protocol
Proximity-1协议提供两类业务[11-12]:数据业务和定时业务。数据业务包括CCSDS标准包业务和用户自定义的数据业务;定时业务根据邻近链路传输单元的发送/接收,实现定时标志获取、提供通信单元间的时钟校正数据、实现时差测距。
Proximity-1协议为应用过程提供的数据业务有CCSDS包传输业务、用户定义数据传输业务和时间业务。上述所有业务数据可以在前向和返向链路同时发生,如发送命令的同时可以接收遥测数据等。定时业务则为时间相关数据和基于时间的测距过程提供航天器时间。航天器之间的近距离操作需要定时业务提供下列功能:星载近距离时钟相关;世界标准时间传递;非相干时差测距等。这三种功能均在收发机进行数据业务操作时实现,并可与其它数据操作同时完成,工作于双工、半双工、单工模式。
3 基于Proximity-1协议的星间测距与时间同步技术
多数任务中,卫星组网拓扑构形一般尺度不太大,最远两星距离一般在几百千米以内(本文取300km),星间通信链路适合采用CCSDS Proximity-1近距空间链路通信协议。数据帧结构采用CCSDS Proximity-1版本3定义的传输帧[11]。
3.1 近距链路时间业务
Proximity-1协议中把时间业务作为一种独立的业务来进行描述,突出了时间业务在协议中的重要性。由于近距链路协议完成的是近距的、实时的通信,所以要求通信双方要达到高度的时间统一。完成时间业务的基础是使用相同的时间标志捕获方法,这种方法要求收发双方具有对所有传输帧同步码的最后比特位收/发时间的跟踪能力。
3.1.1 时间捕获方法
本地控制器发送设置控制参数(本地时间标记)的指令给发送端,使其以规定的时间间隔去捕获本地参考事件和相关的帧序列号。一旦收到此指令,MAC子层将变量时间收集由“未激活”设置为“收集数据”,以表示时间搜集开始。
发送端产生并传输设置控制参数(时间采集)指令。以规定的时间间隔每发出一帧,发送端就会捕获每一传输帧的时间结点和帧序列号。在应用这些收集到的数据时,还必须知道发射过程中的内部信号路径的延迟信息。一旦达到了规定的时间间隔(已经捕获到了足够的时间结点),MAC子层将时间收集设置为“收集完成”,表明可以传递这些时间和相对应的帧序列号。这时,接收方接收到了设置控制参数指令,确认并解码指令,随后在规定时间间隔内捕获每个传输帧的时间和帧序列号。接收端也将跟踪每个内部信号路径的延迟,一直到读出所收集的数据,将时间收集设置为“未激活”为止。
当时间收集过程完成时,发送端和接收端都会把它们捕获的时间和帧序列号传送给各自的本地控制器。本地控制器将会生成一个近距时间关系包,包含有本地收发机在规定时间内收到的一系列点(帧时间结点、帧序列号)。另外,在收发链路中的内部信号路径延迟要求能事先确定。
3.1.2 测距传输帧格式定义
版本3传输帧包括结构固定的40bit导头和长度小于16 344bit的数据域,如图2所示。由于须要在本地传输帧同步码(0xFAF320)发送时刻提取本地距离测量值,因此定义传输帧的长度为1Kbit的整数倍,包括24bit传输帧同步码、数据导头、循环冗余校验码、数据域。
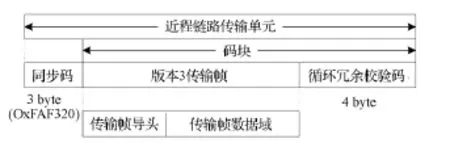
图2 Proximity-1链路协议传输帧结构Fig.2 Proximity-1link protocol transmission frame structure
为了实现星间的高精度测距和时间同步,在数据域内定义顺序排列的3段:勤务段、传输模式段和任务信息段。勤务段用于高精度测距和时间同步(如图3所示),传输模式段用于定义信息发送模式,任务信息段为有效数据内容。
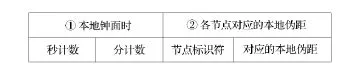
图3 用于测距/时间同步定义的勤务段结构Fig.3 Service segments structure in ranging/time synchronization
3.2 非相干双向测距与时间同步原理
非相干双向测距与时间同步方法描述如下:①建立链路的两颗卫星分别以各自的星载频标为基准,在发射时隙到来时刻向对方发送结构相同的信息帧,本地的基带时钟、载波频率均由本地频率综合器产生,不与对方卫星相参,双方无频率、相位关系约束;②卫星在接收时隙内,对收到的对方信号进行捕获、跟踪、解调,恢复出信息帧,并在信息帧同步头最后1位下降沿时刻提取本地历元时,联合对方信息帧发送历元时计算出本地伪距,并将其嵌入到本地信息帧中发送给对方;③两星各自独立地利用本地测得的伪距和接收信息帧中解调出来的对方伪距,通过算法计算获得星间几何距离和时间同步差(两星钟差),进行时间同步调整。图4给出了两颗卫星(定义为A星和B星)进行星间距离与钟差测量的原理及时序关系。
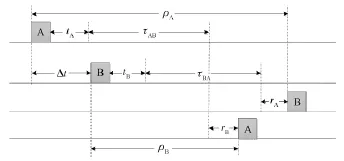
图4 双向非相干测距与钟差测量原理及时序关系Fig.4 Timing of non-coherent ranging and clock offset measurement
图4 中各参数的定义如下:Δt是两星的钟差,τBA是指从星B到主星A天线间的电磁波传播时延,τAB是指主星A到从星B天线间的电磁波传播时延,tA和tB是指主星A和从星B的发射设备时延,rA和rB是指主星A和从星B的接收设备时延,ρA和ρB分别是主星A和从星B测量得到的本地伪距。在图4中,主星A和从星B分别以自身时钟为基准,在各自的分配时隙内发射测距信号。由于双方时间不一致,双方发送的测距信息帧之间存在时间差Δt。由图4的时序关系,可以得到两星的本地伪距的表达式如下:

本地伪距ρA和ρB是接收方在发送本地帧同步码后沿时刻提取的伪距,反映此刻两星之间的几何距离。其中误差项zBA=tB+rA和zAB=tA+rB是单向组合零值,变化范围很小,且可以精确标定。εA和εB是指由于星载频标的准确度引起的不确定项[2]。

式中:t1=tB+τBA+rA;t2=tA+τAB+rB;fA(t1)和fB(t2)是指主星A和从星B随时间变化的本地频标;f0为标称的频标值。
采用双向测距方法进行距离与钟差解耦时,如果两星之间的作用距离小,从而可以忽略由卫星运动引起的测量误差,因此,简单地利用式(1)中等式的相加和相减运算便可求解星间距离和钟差。
如果2颗卫星之间有相对运动且模型未知,上述方法已不再适合系统的星间距离与钟差的解耦,必须对卫星运动引起的误差进行分析与建模,从而通过误差修正获得较高的星间测距与时间同步精度。设两颗卫星之间相对速度为v(t),c为真空电磁波传播速度,根据刚体运动学理论,令

式中:vave是钟差Δt时间段内两颗卫星在给定惯性系和时间系统内的相对运动平均速度。根据式(1)可得

3.3 误差分析
式(7)和式(8)给出了星间距离与钟差的解耦计算公式,其中包含的误差项如下:
1)组合零值误差
zBA和zAB是以系统零值的组合形式对星间测量带来影响。组合零值可以事先由地面进行精确的校准后注入星载设备,校准精度可达0.1ns。
2)星载原子钟误差
由式(2)和式(3)可知,误差项εA和εB的影响与星载原子钟的准确度和星间传播延迟有关。根据不等式法则得到此误差大小为

卫星均采用高稳定原子频标作为星上频率基准,一般具备优于μmax≤e-11μ≤1×10-11的频率准确度,假设星间最远传播延迟τmax≈1ms(相当于约300km距离),分析原子钟在星间测量时的准确度,只需要根据其秒级稳定度指标即可。因此误差项的影响最大值约为皮秒级(相当于毫米级距离),可以忽略。
3)相对运动误差
相对运动误差是指由于卫星之间的相对运动而引起的测距与时间同步误差。相对运动误差与两颗卫星的相对运动平均速度vave、钟差的尺度成正比。通常卫星成员之间的相对运动速度不会过大,可定为λ=|0.5vave/c|,若|vave|≤34km/s,则λ≤6× 10-5。由于式(7)和式(8)计算模型的不确定项是一微小量,如果在计算中作为模型误差忽略,引起的钟差估计相对误差≤6×10-5,对绝大多数任务的星间测距和钟差测量能够满足精度要求。对于其它必须考虑卫星动态误差影响的星间测量系统,卫星的径向速度可以由存储的星历计算得到,星历误差直接影响修正误差,该误差精度为厘米级每秒,要进行运动补偿。
4)测量误差
原始伪距观测量ρA和ρB是星间链路接收设备从跟踪环路中提取的,因此环路的热噪声误差和动态应力误差直接影响到伪距测量的误差。伪码跟踪环(通常采用延迟锁定环),总的1σ跟踪误差为

式中:σtDLL表示热噪声引起的跟踪误差;θe为相对运动引起的动态应力误差。由于载波和伪码相参,故采用载波辅助码环技术来消除绝大部分动态,因此,动态应力误差可以忽略不计。热噪声引起的跟踪误差为[13]

式中:BL为环路等效噪声带宽;d为相关间距;CN0为接收信号载噪比;T为预检测积分时间;fcode为伪码速率。
4 实验验证
4.1 地面实验的设计与组成
为验证理论分析的正确性,地面验证平台包括2台星间组网通信/测距终端,功能与星载终端任务相同,并能模拟无线信道的距离衰减和传输延迟、信道噪声与干扰、相对运动引起的多普勒频移等。每台星间通信与测量终端包括:中频信号处理单元、基带处理单元、CCSDS协议处理单元、精密测距与时间同步处理单元、射频发射/接收单元、上位机信息综合处理单元等。星间通信/测距实验系统如图5所示,2个星间通信/测距终端使用高频电缆连接、通过射频接口进行通信。测试验证系统模拟星载数据系统功能,提供星载数据接口与终端进行通信,完成对终端的命令控制、状态监测、协议分析、收发数据的实时比对、测距精度计算分析等功能。
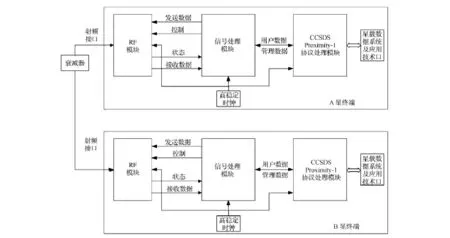
图5 星间通信与测距地面验证平台Fig.5 Inter-satellite communication and ranging ground verification platform
4.2 实验结果及分析
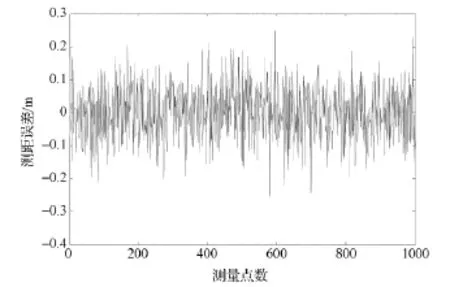
图6 星间距离测量误差Fig.6 Measurement error of inter-satellite range
测试时,使用定制的已知长度线缆测出信号的传输时延,然后根据信号的时延反算电缆长度。图6和图7分别给出了星间距离与钟差的测量误差。
对1000个测量结果进行随机误差统计的结果表明:最大测距误差为0.26m,方差1σ为0.08m;最大钟差为0.86ns,方差1σ为0.26ns。钟差与测距精度量级相同。
根据发射功率、天线增益、工作频点并结合星间距离计算出链路的空间传播损耗,叠加上指向损耗、馈线损耗等,得到接收端接收信号载噪比(CN0)约为56dB/Hz,将其带入式(11)可计算出环路的热噪声测量误差为:0.043m(1σ)。可见,测量误差主要受热噪声的影响。以上结果表明,非相干双向测距方法的理论分析与实验结果基本一致,验证了理论分析的正确性。
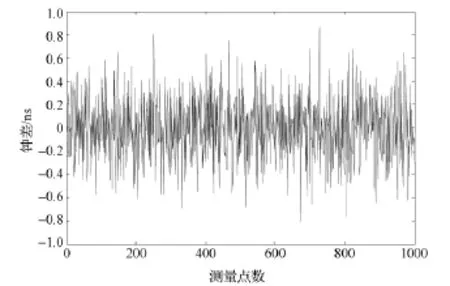
图7 钟差测量误差Fig.7 Measurement error of clock offset
5 结束语
通过地面验证平台的实验,结果显示测距精度优于0.3m,证明了理论分析的正确性。本文提出的方法功能集成度较高,易于工程化设计,为星间链路系统提供了一种新的方法,可用以实现星间组网通信、测距、时间同步、相对定位等功能。
(References)
[1]黄波,胡修林.北斗2导航卫星星间测距与时间同步技术[J].宇航学报,2011,32(6):1271-1275 Huang Bo,Hu Xiulin.Inter-satellite ranging and time synchronization technique for BD2[J].Journal of Astronautics,2011,32(6):1271-1275(in Chinese)
[2]徐勇,常青,于志坚.GNSS星间链路测量与通信新方法研究[J].中国科学,2012,42(2):230-240 Xu Yong,Chang Qing,Yu Zhijian.On new measurement and communication techniques of GNSS intersatellite links[J].Sci China Tech Sci,2012,42(2):230-240(in Chinese)
[3]王世练,张尔扬.CCSDS Proximity-1及其在编队飞行小卫星群中的应用[J].遥测遥控,2003,24(3):10-14 Wang Shilian,Zhang Eryang.CCSDS Proximity-1and its use insmall satellites cluster in formation flying[J].Journal of Telemetry,Tracking and Command,2003,24(3):10-14(in Chinese)
[4]张蕾,严林,高翠东,等.一种绕飞编队卫星星间链路系统的总体设计方法[J].航天器工程,2014,23(3):23-28 Zhang Lei,Yan Lin,Gao Cuidong,et al.Top-level intersatellite link subsystem design method for satellite formation[J].Spacecraft Engineering,2014,23(3):23-28(in Chinese)
[5]吴国强,孙兆伟,赵丹等.编队小卫星星间通信系统的发展和趋势[J].哈尔滨工业大学学报,2007,39(11):1699-1703 Wu Guoqiang,Sun Zhaowei,Zhao Dan,et al.Development and trend research of inter-satellite communication system on formation small satellites[J].Journal of Har-bin Institute of Technology,2007,39(11):1699-1703(in Chinese)
[6]Jeongrae K and Tapley B D.Simulation of dual one-way ranging measurements[J].Journal of Spacecraft and Rockets,2003,40(3):419-425
[7]任放,赵和平,陈曦.基于CCSDS Proximity-1协议的动态变帧长策略研究[J].航天器工程,2013,22(4):72-76 Ren Fang,Zhao Heping,Chen Xi.Strategy study of dynamic variable frame length based on CCSDS proximity-1protocol[J].Spacecraft Engineering,2013,22(4):72-76(in Chinese)
[8]王娜,张建华,张国华.近距空间链路协议概述[J].空间电子技术,2011,1:51-55 Wang Na,Zhang Jianhua,Zhang Guohua.The overviews on proximity-space link protocol[J].Space Electronic Technology,2011,1:51-55(in Chinese)
[9]谭维炽,顾莹琦.空间数据系统[M].北京:中国科学技术出版社,2004:170-173 Tan Weizhi,Gu Yingqi.Space data system[M].Beijing:China Science and Technology Press,2004:170-173(in Chinese)
[10]CCSDS.CCSDS 211.0-B-5Proximity-1space link protocol-data link layer[S].Washington D.C.:CCSDS,2013
[11]CCSDS.CCSDS 211.2-B-2Proximity-1space link protocol-coding and synchronization sublayer[S].Washington D.C.:CCSDS,2013
[12]CCSDS.CCSDS 211.1-B-4Proximity-1space link protocol-physical layer[S].Washington D.C.:CCSDS,2013
[13]Kaplan E D,Hegarty C J.Understanding GPS principles and applications[M].Boston:Artech House,2007
(编辑:张小琳)
Study of Inter-satellite Ranging and Time Synchronization Technology Based on CCSDS Proximity-1Protocol
SHEN Jingshi1ZUO Lihua2HE Rui1KANG Xuhui1
(1Shandong Aerospace Electro-technology Institute,Yantai,Shandong 264670,China)(2DFH Satellite Co.,Ltd.,Beijing 100094,China)
Inter-satellite information interacting,ranging measurement and time synchronization are key technologies for the satellite constellations and satellite formation flying missions.In this paper,a method of non-coherent precisely ranging and time synchronization is proposed based on the timing services as given in CCSDS proximity-1protocol,then the detailed formular derivation and model error of the algorithm are proposed and analyzed.The theoretical analysis and experiment results show that the method presented in the paper achieves higher precision of ranging measurement and time synchyonization,and can easily integrates the functions.Further more,it can provide an advantage design approach for the inter-satellite link.
Proximity-1;inter-satellite communication;non-coherent ranging;time synchronization
TN915
:ADOI:10.3969/j.issn.1673-8748.2016.01.010
2015-12-08;
:2016-01-07
申景诗,男,硕士,高级工程师,从事卫星通信、天基组网技术研究工作。Email:shenjingshi@hotmail.com。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
导航定位学报(2022年4期)2022-08-15
计算机测量与控制(2019年12期)2020-01-03
电子制作(2019年19期)2019-11-23
导航定位学报(2018年3期)2018-09-03
太空探索(2018年8期)2018-08-08
计算机测量与控制(2018年6期)2018-07-04
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
