
小型无人艇集成控制系统设计与实验研究
2016-04-24 03:18阚亚雄卢道华仲伟波
舰船科学技术 2016年10期
阚亚雄,卢道华,仲伟波,王 佳
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003;2. 江苏科技大学 海洋装备研究院,江苏 镇江 212003;3. 江苏科技大学 电子信息学院,江苏 镇江 212003)
小型无人艇集成控制系统设计与实验研究
阚亚雄1,卢道华2,仲伟波3,王 佳1
(1. 江苏科技大学 机械工程学院,江苏 镇江 212003;2. 江苏科技大学 海洋装备研究院,江苏 镇江 212003;3. 江苏科技大学 电子信息学院,江苏 镇江 212003)
针对传统无人艇控制系统集成度低、可靠性差、通信距离有限等问题和在运动控制中存在的艇身水动力系数不确定性,加上外界风浪流的干扰等非线性因素,设计开发了一种小型无人艇集成控制系统。首先详细阐述了该集成控制系统的硬件结构、软件工作模式、控制模型及运动控制算法,使用matlab/simulink 工具箱进行速度、航向及深度的运动控制仿真实验。然后以自研的无人艇样机为实验对象进行下水实验。最终计算机仿真和实物下水试验结果表明,所设计的运动控制器不仅能实现艇上各传感器的数据采集与通信功能,下达和反馈运动控制指令的功能,也可以在一定外界干扰下跟踪运动控制中的期望目标,实现控制要求。
无人艇;集成控制系统;反步滑模控制;数据采集系统
0 引 言
小型无人艇是一种智能小型船舶,具有水线以上雷达反射面积小、智能自主、密集搭载多功能传感器等特点[1-2]。目前无人艇控制系统的研究作为一个新兴的船舶研究领域发展较晚但发展速度较为迅速,以美国的 Spartan 号和以色列的 Protector 号为代表,均具备半自主能力,可装备模块化载荷执行水雷战、情报监视与侦察、部队防护、港口防护、对敌水面和陆地目标实施精确打击以及反潜等任务。我国在无人艇关键技术方面的研究近年也取得了巨大成就,但与西方国家相比有着很大差距[3]。国内在无人艇的集成控制系统上的研究还很少,至今尚无一款成熟的国产无人艇能同时够搭载多波束测深仪,毫米波雷达等多种传感器进行有效的水面水下作业任务。在无人艇底层运动控制仿真方面针对单泵喷水推进滑行艇提出了一种滑模控制算法实现了无人艇航向跟踪的仿真工作[4]。文献[5]引入了一种水面无人艇测控系统设计方法。文献[6]采用一种数字仿真和部分硬件系统结合的形式,构造了一套半实物仿真平台。这些研究对无人艇的运动控制和仿真有益,但在实物中将多传感器和运动控制模块集成为综合控制系统的研究较少。
本文以自主研发的小型侦察型无人艇实物为研究对象,详细阐述了该无人艇集成控制系统的系统体系结构、工作模式、数学模型以及基础运动控制算法。在仿真和下水实验中实现了无人艇在水平面和垂直面上的运动控制动作以及艇上各传感器的数据采集与通信传输,能实时将控制指令的下达并反馈回控制站等功能。本文旨在开发一套稳定、可靠的无人艇集成控制系统,适用于小型自主巡航兼有远程人工遥控功能的无人艇。
1 控制系统总体框架
1.1 某小型无人艇集成控制系统结构
所设计的无人艇集成控制系统包括岸基控制站和艇载控制系统组成。两大集成控制系统之间由无线数据通讯系统实现远距离无线实时控制。舰载系统为无人艇控制系统核心,它具有以下 4 类模块:1)底层运动控制模块,2)环境感知模块,3)导航位姿位置定位模块,4)目标探测避障模块。集成了包括 24 GHz毫米波雷达,单波束声呐,GPS/北斗定位模块,位姿参考模块等在内的多个传感器。系统结构如图1 所示,图2 为舰基集成控制系统实物图。
1.2 某小型无人艇岸基集成控制系统
岸基控制站可放置在陆地或舰船上,实现无人艇的人工控制、通信等功能,其内部包括电源系统、岸基工控机、显示屏、通信系统、操作手柄、PLC 控制器等系统组成。电源系统由 220 VAC 或 24 VDC 锂电池供电,满足不同场合下系统供电需求;操作手柄和PLC 构成人工控制系统,实现无人艇人工控制;通讯系统可根据无人艇的不同需求配置不同无线通讯线路(WIFI 通信、水声通信、无线数传通信),其中无线数传通信可满足无人航行器的遥控指令传输、WIFI 通讯满足无人艇的信息或图像的传输,水声通信满足无人艇在水下潜航时的指令和图像的传输等。

图1 无人艇集成控制系统硬件体系Fig. 1 Integrated control systemhardware structure of USV

图2 无人艇舰基控制系统部分实物图Fig. 2 Figure of USV integrated control physical system
1.3 某小型无人艇舰基集成控制系统
艇载控制系统由舰载工控机、通用底层控制系统和通信系统组成。工控机实现无人艇的通信数据处理、雷达信号处理、图像信号处理、单束波信号、避碰等功能。底层控制系统是基于西门子 S7-200 系列PLC 为核心进行开发的,通过串口与岸基 PLC 和舰载工控机进行通信,传输指令和数据;通过开关量输入接口可接受无人艇转舵机构上限位开关等开关量信号,通过开关量输出接口可控制继电器等负载;通过模拟量输入接口可接受温湿度、角度等模拟量信号;通过模拟量输出接口可控制主电机转速等,实现航速控制;高速脉冲输出接口实现升降舵、方向舵步进电机控制,从而实现无人航行器航向及升沉控制。舰载通信系统采用无线通信、WIFI 通信,与岸基控制站实现数据传输。
2 集成控制系统软件体系结构
无人艇的集成控制系统的软件任务主要由底层的数据采集,运动控制,数据的处理、融合、监控、故障的诊断,无线通信和顶层的控制模型与算法组成。
2.1 软件工作模式
图3 为无人艇控制软件的体系结构,具体说明如下:1)舰载底层 PLC 运动控制器主要用于发出主电机,方向舵步进电机,升降舵步进电机的控制指令,表现为主电机的调速电压、步进电机的脉冲数等。2)无人艇数据采集与反馈,表现为无人艇的位置、姿态、主螺旋桨转速,各舵的舵角位置等。3)数据处理,表现为岸基工控机接收到传感器原始数据后进行相应的滤波降噪处理并显示在多任务显示屏上。4)岸基工控机根据目标点进行航迹规划等
集成控制软件的运行平台为 Win7 操作系统,开发工具为 VC++6.0,工控机运行时,所执行的任务按功能主要分为 4 类:
1)运动控制主任务。舰载 FPC7063 工控机利用VC 中建立的主任务模块,控制节拍为 1 s/次,每隔 1 s调用一次底层 PLC 上传的数据和数据处理系统处理的传感器数据,根据调用的数据和岸基控制系统下达的指令进行处理分析,完成运动控制指令的下达或调用故障诊断与紧急处理任务模块进行故障诊断与紧急制动。
2)信息采集和指令下达。信息采集包括:各传感器通过串口协议或 TCP/IP 协议上传的数据,其中串口数据主要有 PLC 数据、单波束声呐数据、北斗 GPS 数据、SDI-MAHRS 位姿参考系统数据、主电池 BMS 管理器数据。基于 TCP/IP 协议上传的数据为 24 GHz 毫米波雷达数据。指令下达主要通过串口根据modbus协议向 PLC 发送控制命令。
3)数据处理。岸基工控机需要处理的数据首先包括判断北斗/GPS、航姿参考系统采集的原始串口数据是否符合相应的数据格式,剔除某个时刻不完整的数据,还包括有着较大扰动和噪点的毫米波雷达、激光红外摄像机采集的数据和图像,如果不对数据加以预处理,剔除噪点和滤波就会存在控制精度低,图像识别率低的情况。
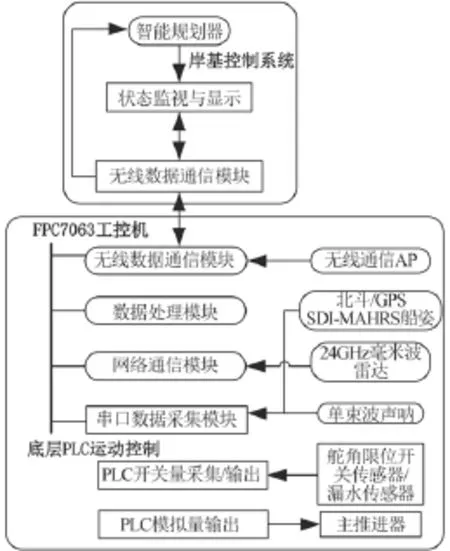
图3 无人艇软件体系结构图Fig. 3 software systemstructure of USV
4)通信任务。包括任务舰载工控机和岸基工控机通过无线 WIFI 进行无线数据的通信任务,也包括正常工作时利用串口通信实现工控机与 PLC 的数据通信,每 1 s 接受一次上传数据,并向底层 PLC 发送 1 次指令。
2.2 集成系统数学模型
根据相关文献资料[4],此型无人艇是典型的六自由度运动模型,可在 6 个自由度方向实现前进、后退、下潜、上浮,纵摇及转向运动。其运动模式各控制量相互耦合,不便于控制器的控制算法设计,考虑到该小型无人艇的对称性,本文忽略横摇对无人艇的影响后简化为水平面运动模型和垂直面运动模型。以水平面为例,无人艇的水平面运动学方程为:

无人艇的水平面动力学方程为:

式中:X,M,N 分别为无人艇执行机构在纵荡、纵摇和横摇方向上的控制输入力(力矩);m为无人艇质量;Iy和 Iz为无人艇的转动惯量;为无人艇航行过程中可能受到风浪流的干扰或者是水动力系数不准确等不确定性影响总和。
2.3 无人艇集成控制系统控制算法
对于无人艇这样的非线性、时变系统,本文采用的控制方法自适应反步滑模算法,将反步法、滑模法和自适应律相结合,算法控制流程的前 n - 1 步采用反步法,第 n 步引入滑模控制消除反步法的匹配不确定性影响,最后采用自适应律在线辨识不确定性影响总和的方法。较之常用的 PID 算法其优点在于具有较短的收敛时间、良好的动态性能和自适应能力。运动控制器的具体设计过程不详细介绍[6-7],结果如下:
设计纵向速度控制器为:

设计航向角控制器为:

垂直面深度控制器与水平面控制器推导过程类似,显然,通过调整控制器的参数可以改变控制器的收敛速度、超调量等控制指标。
3 仿真与实物实验结果与分析
3.1 运动控制仿真实验
本文研究对象是自研的一款小型无人艇,艇长 4m,艇宽 1.5m,吃水 1.30m,总高 1.5m,排水量空载 1 t,推进方式采用电推,输入功率 10 hp,螺旋桨桨叶直径295mm,额定最大转速 1 800 r/min,最大航速 10 kn,控制方式为人工遥控、自主操控方式,在搭载多种模块时,可具备目标识别与避碰、自主导航、航迹规划等能力。集成控制系统中的水动力系数参考mIT 的硕士生 Timothy Prestero 提出的 REMUS 水下无人艇仿真模型中参数。首先为了验证水平面自适应反步滑模控制器的有效性和鲁棒性,利用matlab R2014a/Simulink在无人艇数学模型的基础上进行仿真研究。
无人艇仿真实验中的水平面的初始状态为 u(0)= v(0)= r(0)= Ψ(0)= 0,期望的速度为 ud=2m/s,期望首向角为前 50 s 为 Ψd=25°,后 50 s 为 Ψd=-25°。垂直面的初始状态为 u(0)= 0.1m/s,w(0)= q(0)= ζ(0)= 0,期望的速度 ud=2m/s,期望深度ζd=5m。假设无人艇工作环境为定向水流干扰环境下的进行近水面运动仿真,水流速度 Uc=0.1m/s,流向角 αc=π/4。水平面控制器参数为:h1=1,k1=5,c1=3,γ1=5,γ2=π。垂直面控制器参数为:h1=1,h2=0.3,γ1=5,γ2=π/6,k1=0.8,k2=1,c1=0.5,c2=1.5。
3.2 实物实验

图4 无人艇水平面控制器和动力学模型 simulink 建模图Fig. 4 Figure of USV turningmotion control systemand dynamicmodel build in Simulink

图5 无人艇垂直面定深度仿真曲线Fig. 5 Simulation curves of depth control

图6 无人艇水平面定航向仿真曲线Fig. 6 Simulation curves of course control
小型无人艇在研制成功后,先后多次完成下水实验,对无人艇的艇体性能、集成控制系统的运行情况进行验收,确认了该集成控制系统的可行性和可靠性。在试验中,集成控制系统的实物仿真实验硬件设备包括:岸基手柄遥控台、舰载工控机、舰载 PLC、舰载各类传感器、无线通信模块、以及主电机和舵机。分别实现了无人艇的手动遥控和自主巡航功能。
试验中的集成控制系统软件界面如图9 所示,集成控制系统界面包含摄像采集区、数据采集区和运动控制区。集成控制系统采集毫米波雷达和电池管理系统数据如图10 所示。
由仿真结果可以得到如下结论:
1)由matlab 仿真图可看出,在集成控制系统算法的控制下,无人艇在受流向角为 45°,流速为 0.1m/s的水流干扰的仿真环境中进行了基础的航向运动控制和深度运动控制,其中航向控制仿真时间 t 为 100 s,上升时间为 6.78 s,超调量为 9.28%,深度控制仿真时间 t 为 100 s,上升时间为 10 s,超调量为 12%。仿真实验说明控制算法可使无人艇达到控制要求,在较小的环境干扰下控制算法仍具有一定的鲁棒性。
2)实物试验中无人艇舰载工控机通过串口通信或以太网通信实时接收解算艇上各传感器获取的数据如北斗终端、航姿参考仪、24 GHz 毫米波雷达信息、主电池管理系统采集信息等。采用 COMFAST 300m大功率无线 wifi 模块和 DTD433ME 远距离无线数据终端和岸上工控机/PLC 控制器进行了艇上大容量数据如雷达、声呐、图像数据的传输,最后经测试无人艇在无障碍物的水面最远通信距离可达 8 km。试验实现了无人艇的远程遥控、基本的自主控制和艇上各传感器的数据采集收发与集成。

图7 无人艇下水试验图Fig. 7 Figure of USV field testalake

图8 便携式手柄控制台Fig. 8 Figure of control lever systemin field test

图9 集成控制系统人机界面图Fig. 9 Main user interface of USV integrated control system

图10 毫米波雷达和主电池管理系统数据采集图Fig. 10 Figure ofmillimeter-wave radar and BMS data collection
4 结 语
本文针对一种研制的小型无人艇样机,开发了一套集成控制系统,内部软件基于 TCP/IP 协议和modbus 主从站协议,使小型无人艇具备了基本的运动控制功能,包括直航、转向、下潜、上浮、采集传感器数据、接受发送岸基控制台指令的能力,验证了集成控制系统的硬件模块、软件结构体系的设计以及通信接口的可行性和合理性。
[1]CAMPBELL S, NAEEmW, IRWIN G W.areview on improving the autonomy of unmanned surface vehicles through intelligent collision avoidancemanoeuvres[J]. Annual Reviews in Control, 2012, 36(2): 267-283.
[2]李家良. 水面无人艇发展与应用[J]. 火力与指挥控制, 2012, 37(6): 203-207. LI Jia-liang. Development and application of unmanned surface vehicle[J]. Fire Control & Command Control, 2012, 37(6): 203-207.
[3]周洪光, 马爱民, 夏朗. 无人水面航行器发展[J]. 装备研究, 2009, 30(6): 17-20, 30. ZHOU Hong-guang,mA Ai-min, XIA Lang.aresearch on the development of the unmanned surface vehicles[J]. National Defense Science & Technology, 2009, 30(6): 17-20, 30.
5 结 语
通过小波滤波,使得电罗经直航向信号变得平稳,有效滤除高频干扰,为对信号进行傅里叶分析打下良好基础,通过时频转换的傅里叶分析法,可以确定信号中能量较大的频点,利用所得频点对航向模型进行傅里叶展开建模,并对模型参数进行在线地自适应迭代估计,结果表明,模型预测效果较好,为下一步修正电罗经误差打下一定的基础。
参考文献:
[1]谢荣生, 孙枫, 郝燕玲, 等. 基于小波分析的船用捷联陀螺信号滤波方法[J]. 哈尔滨工程大学学报, 2001, 22(2): 24–26. XIE Rong-sheng, SUN Feng, HAO Yan-ling, et al. Filtering of ship’sstrap-down gyroscope signals based on wavelet analysis[J], Journal of Harbin Engineering University, 2001, 22(2): 24–26.
[2]刘前林, 王立世, 黄新建. 运用傅里叶变换对差分吸收光谱的解析[J]. 光谱学与光谱分析, 2008, 28(5): 1076–1079. LIU Qian-lin, WANG Li-shi, HUANG Xin-jian. Using fourier transformto analyse differential optical absorption spectrum[J], Spectroscopy and Spectral Analysis, 2008, 28(5): 1076–1079.
[3]梁志国, 张大治, 孙璟宇, 等. 四参数正弦波曲线拟合的快速算法[J]. 计测技术, 2006, 26(1): 4–7, 47. LIANG Zhi-guo, ZHANG Da-zhi, SUN Jing- yu, et al.afast arithmeticmethod of four-parameter sine wave curve-fit[J], Theory and Practice, 2006,26(1): 4–7.
[4]万彦辉, 秦永元. 小波分析在陀螺信号滤波中的研究[J]. 压电与声光, 2005, 27(4): 455–457. WAN Yan-hui, QING Yong-yuan. Application of wavelet analysis in gyro signal filtering[J], Piezoelectrics and Acoustooptics, 2005, 27(4):455–457.
[5]牟龙华, 邢锦磊. 基于傅里叶变换的精确频率测量算法[J].电力系统自动化, 2008, 32(23): 67–70, 94.mOU Long-hua, XING Jin-lei. An accurate frequencymeasuring algorithmfor power systems based on fourier transform[J], Automation of Electric Power Systems, 2008,32(23): 67–70.
[6]BOGGESS A, NARCOWICH F J.afirst course in wavelets with fourier analysis[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2010.
[7]王世一. 数字信号处理[M]. 2版. 北京: 北京理工大学出版社, 2011: 13–15.
[8]WERNICKmN,mORRIS Gm. Effect of spatial coherence on knife-edgemeasurements of detectormodulation transfer function[J]. Applied Ooptics, 1994, 33(25): 5906–5913.
[9]JENQ Y C, CROSBY P B. Sinewave parameter estimation algorithmwith application to waveformdigitizer effective bitsmeasurement[J]. IEEE Transactions on Instrumentation andmeasurement, 1988, 37(4): 529–532.
[10]吴义华, 杨俊峰, 陈敬原, 等. 正弦信号四参数的高精度估计算法[J]. 中国科学技术大学学报, 2006, 36(6): 625–629. WU Yi-hua, YANG Jun-feng, CHEN Jing-yuan, et al. High accuracy estimation algorithmfor 4 parameters of sine-wave[J]. Journal of University of Science and Technology of China, 2006, 36(6): 625–629.
Design and experience of the small unmanned surface vehicle integrated control system
KAN Ya-xiong1, LU Dao-hua2, ZHONG Wei-bo3, WANG Jia1
(1. School ofmechanical Engineering, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 2.maine Equipment Research Institute, Jiangsu University of Science and Technology, Zhenjiang 212003, China; 3. School of Electronicsand Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
Aiming at the shortcomings existing in the traditional Unmanned Surface Vehicle (USV) control system, such as low integrated, poor reliability, limited in communication distance, and wide variations in USV hydrodynamic coefficients and disturbance,aIntegrated Control Systemis designed and purposed for the kind of small size USV. First, elaborate the structure of the hardware, operatingmodes of the control software, USVmathematicalmodel andmotion control algorithmof the integratedmotion system, the USVmotion control systemand physical simulation are conducted inmatlab/simulink to test the stability and efficiency of the integrated control system. Finally, the results of simulation andafield trial inalake show that the integrated control systemcan not only achieve collect sensors data and give control instructions by communicate the host control system, but also can track the desired target and is insensitive to the changes of the unmatchablemodel perturbation and wave interference, which achieve the control requirements.
USV;integrated control system;adaptive backstepping slidingmode control;data collection system
U664.82
:A
1672 - 7619(2016)10 - 0067 - 05
10.3404/j.issn.1672-7619.2016.010.013
2016 - 02 - 02;
2016 - 04 - 05
阚亚雄(1990 - ),男,硕士研究生,主要从事无人艇控制系统研究。
猜你喜欢
环球时报(2019-11-14)2019-11-14
现代电子技术(2019年1期)2019-01-10
试题与研究·教学论坛(2017年19期)2017-07-07
大陆桥视野·下(2017年5期)2017-06-19
环球时报(2017-05-16)2017-05-16
中学数学杂志(高中版)(2016年6期)2017-03-01
电脑知识与技术(2016年21期)2016-10-18
印刷技术·数字印艺(2015年7期)2015-08-31
现代电子技术(2015年5期)2015-03-31
新高考·高一物理(2014年1期)2014-09-18
