
基于信息流视角的智能船舶系统模型
2016-04-24 03:18:18吴笑风张郑海
舰船科学技术 2016年10期
吴笑风,张郑海,许 攸,范 维,石 瑶,岳 宏
(1.中国船舶重工集团公司 第七一四研究所,北京 100101;2.渤海船舶重工有限责任公司,辽宁 葫芦岛 125004)
基于信息流视角的智能船舶系统模型
吴笑风1,张郑海2,许 攸1,范 维1,石 瑶1,岳 宏1
(1.中国船舶重工集团公司 第七一四研究所,北京 100101;2.渤海船舶重工有限责任公司,辽宁 葫芦岛 125004)
通过船舶的智能化实现更加安全、环保、经济和可靠的航行,既满足国际海事法规的要求,也符合船东和其他利益相关方的需求。智能船舶代表一种未来船舶的发展状态,以通过大量数据以及信息的高效利用和船岸互联互通实现对船舶优化运营的支持为典型特征。文中结合国际海事组织的 e-Navigation 技术架构,基于信息流视角提出一种与船舶平台无关的智能船舶系统模型。该模型综合考虑船载端和岸端数据和信息的采集、处理、交互和应用等问题,为智能船舶系统的描述提供一种通用的参考架构。
智能船舶;智能系统;e-航海;系统结构模型;信息流
0 引 言
目前,世界上 80% 以上的贸易通过航运完成;有超过 50 000 艘商船从事国际贸易,维护着全球物资运输的稳定[1]。同时,随着全球海上油气资源开发等海上工程应用的增加,海洋工程船舶保有量和未来需求也呈现持续上涨趋势[2]。
近年来,信息技术革命在全球范围内如火如荼地展开,为工业界带来深刻的变革。工业界常以德国“工业 4.0”、美国“工业互联网”和我国“中国制造2025”作为代表性理念,将“智能化”的制造模式和产品向各个领域延伸,并由此衍生出一系列适应当前信息化进程的新兴业态。
作为传统行业,船舶工业和航运业都在经历智能化的冲击,产品特性和生产经营模式都在发生着前所未有的变化。在制造业中,大量基于信息化的生产和服务手段被有机地集成到产品的整个生命周期中。同时,产品(特别是复杂产品,如高端装备)本身的信息化和智能化程度提升对产品的制造和运营服务模式也提出了更高的要求。在英国劳氏船级社等机构发布的《全球海洋技术趋势 2030》(Globalmarine Technology Trends 2030)和 DNV GL 发布的《航运业的未来》(The Future of Shipping)报告中,智能船舶都被列为未来船舶和海洋领域的关键技术之一。
本文从智能船舶系统的信息化本质出发,结合国际海事组织(IMO)“e-航海”(或称“电子航海”,即 e-Navigation/e-Nav)概念的技术架构,构建一个基于信息流的智能船舶系统模型,为智能船舶系统的描述提供一种通用的参考架构。
1 智能船舶的发展
1.1 “智能船舶”概念的起源和内涵
船舶的智能化是一个循序渐进的发展历程。文献[3-4]中提出,e-Nav 概念可被视为智能船舶概念的起源。e-Nav 这一名词最早于 2005 年由英国交通部提出并受到广泛关注。2006 年,日本等 7 国在 IMO 海上安全委员会(MSC)第 81 次会议提出“制定 e-Nav 发展战略”[5]。e-Nav 的正式定义:“通过信息化的手段,对船上和岸上的海事信息进行协调一致的收集、整合、交换、显示及分析,以达到船舶安全、经济航行和环境保护的目标”由国际航标协会(IALA)提出,并于 2007 年被 IMO 采纳。e-Nav 力图通过整合和融合现有的技术工具,最大限度地发挥人和机器的各自优势,对航运活动的模式进行优化[6]。从这个意义上讲,e-Nav 在一定程度上具备了“智能化”的属性。
工业界中一种较普遍的观点认为,“智能”是自动化和信息化深度融合发展到一定程度的产物,即机器具备一定“思考”的能力,能够部分取代人类专家的脑力劳动,实现人机间的相互理解和协作[7]。而实际上,无论是当下被热议的“智能制造”还是“智能船舶”,对“智能”的定义均采用了现阶段的业界共识,其严格的科学内涵仍有待深入挖掘。这里仅以中国船级社发布的全球首部《智能船舶规范》对智能船舶的定义:“利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境、物流、港口等方面的信息和数据,并基于计算机技术、自动控制技术和大数据处理和分析技术,在船舶航行、管理、维护保养、货物运输等方面实现智能化运行的船舶”作为代表,可以看出,智能船舶可被视作支持 e-Nav 实现的一种重要方式。虽然“智能”的定义方法不在本文讨论的范围内,但对于“智能船舶”而言,其目的明确,即通过船舶的智能化,实现更加安全、环保、经济和可靠的航行[8-9],既满足国际海事法规框架中的基本要求,也符合船东和其他利益相关方的需求。
1.2 国外智能船舶的发展
日本、韩国和欧洲对智能船舶的研究和实践开始较早,并已初见成效,较具有代表性。
日本于 2012 年 12 月启动“智能船舶应用平台(Smart Ship Application Platform,SSAP)”项目(预计 2017 年 3 月结束),旨在使船载和岸基信息服务系统方便地获取并最大化地运用船舶导航系统、机械系统和其他船载设备的数据,并予以充分利用,以提高航行的安全性和环保性[10]。
韩国制定了“智能船(Smartship)x.0”规划。其智能船舶概念认为,通过物联网、大数据、虚拟现实等信息通信技术(ICT)促进船—岸间的信息融合,在增强船舶安全性、环保性和经济性的同时,还能够催生新的市场和服务模式,例如船舶运维解决方案和标准化的旧船估值等[11]。
欧洲根据其海员数量短缺、人力成本上升和减少人为失误导致海上事故等需求[12],于 2012 年 9 月启动了“基于智能网络的海上无人航行(Maritime Unmanned Navigation through Intelligence in Networks,MUNIN)”项目,研发自主航行船舶和无人船舶的相关问题[13]。限于当前国际法规的限制和国际上的广泛争议,无人船舶的服役在短期内还无法实现。但欧洲对于无人和自主船舶技术的研究和概念设计仍在持续进行[14]。
尽管各国的关注点不同,但可看出智能船舶技术正在从设备级向全局性和系统性的方向发展。
1.3 国内智能船舶的发展
在我国,智能船舶是“中国制造 2025”中重点领域“海洋工程装备及高技术船舶”的重要方向之一。我国对智能船舶设备级和子系统级的研究上已具备了一定了积累,对系统层级的研究也在逐步展开。
于 2016 年 3 月 1 日起正式实施的《智能船舶规范》综合考虑了船舶安全性、环保性、经济性和可靠性的需求,将(商用)智能船舶分解为 6 个功能模块,包括智能航行、智能船体、智能机舱、智能能效管理、智能货物管理和智能集成平台,自成体系并涵盖了船舶上的各类智能系统[9],是全球首部智能船舶规范,是我国在智能船舶系统方面的重要研究成果。实践方面,由我国设计的智能示范船 38 800 载重吨散货船 i-Dolphin 船型将于 2016 年 9 月开始建造,计划于2017 年交付[15]。
2 基于信息流视角的智能船舶系统模型
2.1 e-Navigation技术架构
前文已述,e-Nav 常被视为智能船舶概念的起源。文献[6]对 e-Nav 的总体技术架构类比为“硬币的 3 个面”:正反 2 个面分别代表船载端和岸端的信息收集、整合、分析和显示;中缝代表船岸间的信息和数据交换。也就是说,船—船、船—岸和岸—岸之间的信息流和数据流是 e-Nav 的核心。文献[16]中提出,数据和信息流、应用接口以及用户接口是 e-Nav 架构中的三大要素,又进一步提出了以信息流为视角的 e-Nav总体架构,如图1 所示。

图1 e-Nav 总体架构示意图Fig. 1 Schematic diagrams of the overarching e-Nav architecture
e-Nav 总体架构中并未对每个部分实现的具体方式做出定义。这主要是因为 IMO 对 e-Nav 的开发遵循了“用户需求驱动”(非技术驱动)的原则[6],在图1 总体架构的基础上,根据用户的需求决定具体的解决方案和发展方向。因此,e-Nav 实质上是一个不断发展、动态的概念。相比之下,智能船舶的发展具有较强的技术驱动属性。作为对 e-Nav 的一种实现方式,智能船舶系统在最大化发挥先进技术效用的同时,也应充分考量其对 e-Nav 架构的兼容性。从信息流角度出发构建一个开放式的系统模型,能够满足这样的需求。
2.2 智能船舶系统的进化
范维和许攸[3]首次提出智能船舶可大致划分为 4 个发展阶段:第 1 阶段仅限于船用设备和子系统状态的本地和远程监测,各设备和子系统的信息链路多为独立布置,数据分析多以离线方式进行;第 2 阶段依然以船舶为服务对象,利用物联网、云计算和大数据分析等技术,通过岸上数据中心和船舶数据库的定时同步服务,达到更高的系统集成度和信息融合度,为船舶提供安全、环保和能效优化等建议,实现半自动化航行;第 3 阶段将在船舶数据分析的基础上,融入港口、物流等信息,实现信息的船—岸无缝连接,实时动态地完成航行、船期和港口操作优化;第 4 阶段将脱离人的因素,实现船舶自主或无人驾驶、港口自动化装卸和物流等。上述智能船舶技术的发展趋势所对应的系统拓扑由图2 和图3 示意性地展示[10]。在实际发展过程中,上述 4 个阶段并无明确界限,一定程度上呈现并行发展的趋势。

图2 智能船舶系统发展初始阶段示意图Fig. 2 Schematic diagramshows the early phase of the development of intelligent ship system

图3 智能船舶系统发展更高阶段示意图Fig. 3 Schematic diagramshows the higher phases of the development of intelligent ship system
总的来说,智能船舶技术的发展符合从设备到系统、从船基到岸基的规律。从信息互联互通的角度看,船舶智能化程度的加深过程也是信息化程度加深的过程,即从设备和应用服务独立布设和连接的松散状态(见图2)逐渐发展成为通过数据中心、总线和局域网对设备和应用服务进行模块化和集成化组织的模式(见图3)。数据和信息的流通贯穿船载端和岸端,系统对信息量和信息的双向交互都有明确的要求。在新的系统组织模式中,系统具有开放的形态,系统功能可进行模块化地调整和扩展,数据将被更加高效地继承和融合。
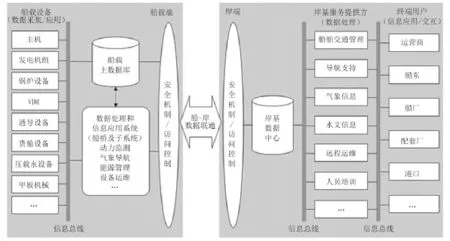
图4 基于信息流的智能船舶系统框图Fig. 4 Systemblock diagramof intelligent ships-an information flow oriented representation
2.3 智能船舶系统模型
文献[17]针对智能工厂提出了一种平台无关的系统结构参考模型,从资源的标准化及服务的封装出发,层级式地构建完整系统。如第 1 节中所述,智能船舶同样以信息互联互通为核心,从信息流的角度看,与智能制造系统的组织模式具有一定的相似之处。参考这一思路,并结合 e-Nav 的技术架构,一种基于信息流的智能船舶系统模型如图4 所示。
系统以数据的充分利用以及高效的管理和传输为核心,分为船载应用和岸基应用两大部分,均有数据库(数据中心)对大量数据进行管理。系统对数据和信息的利用可归纳为“双向三层级”模式。“三层级”指数据和信息呈现的形式按照数据处理和应用的深度可分为数据、中间数据和可读信息 3 个层级;“双向”有两重含义:其一指船载端和岸端之间的双向信息传输;其二指上述 3 个层级间存在的两种信息流向,分别为终端—数据中心的显示/综合流向以及数据—终端的驱动/应用流向。各级数据源和用户按照各自权限上传或获取信息,集中的数据传输经由信息总线完成。船载端和岸基端都设有安全和访问控制机制,以确保系统的网络空间安全(cyber-security),进而保障船舶航行和海事活动的安全和秩序。系统结构模型具有弹性,可根据技术发展和各级用户的需求对功能进行动态调整和扩充。
3 讨论与分析
3.1 信息流模型的合理性、必要性和适用性
在工业界,有关“智能”的定义尚未形成统一。以智能制造系统为代表,我国制造业实践中正在兴起一种观点:一个“智能化”的系统应具备“状态感知、实时分析、自主决策、精准执行”4 个基本特征[18]。具体地,系统利用各类传感器获取设备和子系统的实时运行状态信息和数据,通过高速网络实现数据和信息的实时传输、存储和处理,根据分析的结果,按照预设规则做出判断和决策,再将处理结果反馈到现场调整执行状态,形成闭环。从中可以看出,将数据、信息和高效的互联互通视为成为智能系统的基本要素已成为一种共识。结合第 1 章节中对智能船舶内涵的解读,采用一种以信息流为线索的智能船舶系统模型具备合理性和必要性。
图4 所示的模型是一种具有通用性的智能船舶系统结构的描述方式。它以实现智能船舶所需信息的组织和传输为线索,而与具体的船舶平台无关。如前所述,已有多个国家和组织机构开展了智能船舶相关的研究项目,其各自对于智能船舶系统的定义和功能的实现方式不尽相同;但图4 的信息流模型展示了一种抽象化的对系统运行原理的表征。
以综合船桥系统(Integrated Bridge System,IBS)为例:IBS 是实现《智能船舶规范》中“智能航行”和“智能集成平台”的重要载体,具有完善的导航、驾控、避碰、信息集中显示、报警监控、通信、岸站支持、航行管理和控制自动化等多种功能,同时将各设备的信息进行优化处理,使系统比各设备单独使用时在保障船舶安全航行和降低人员成本等方面发挥更大的作用[19]。文献[20]中的图1 展示了一种典型的IBS 系统拓扑,其中包括对多种船载设备的数据收集或操控,以及对各类信息的综合显示。前者可模块化地对应图4 中“船载设备”部分;后者作为一种信息应用系统,对应图中“船载应用系统”部分。系统可根据需求与岸基数据中心进行通讯,上传船舶状态信息或下载用于船舶运营辅助决策的相关信息。类似地,该系统结构模型与《智能船舶规范》中所定义的6 个功能模块均能进行对应并确定相应的子集。这说明该系统结构模型可为智能船舶不同功能模块的描述提供有效的参考。
3.2 模型应用中的关键问题
对于一个完整的智能船舶系统,本文提出的基于信息流的模型仅是支持其系统间互联互通的基本拓扑结构和框架。在实际系统的构建中,为保证该系统结构的通用性,仍有大量的具体问题需要深入研究。
系统的标准化是其中较具代表性的问题之一。船用信息通信网络与陆基网络在本质上具有相似之处,但限于特殊的工作环境,仍需专用的标准对系统的设置和运行进行必要的规范。国际标准化组织(ISO)船舶和海洋技术委员会(TC8)于 2013 年发布了 ISO 16425 国际标准,在充分考虑了船载和陆基系统差异的基础上,对船载通讯网络系统结构、数据格式要求、管理和运行、检查和试验等问题制定了指导性标准。同时,ISO/TC8 中已有多项关于通信导航、信息传输、航行记录仪等方面的国际标准发布或处于研制过程中,可为智能船舶系统和子系统的标准化提供参考。
此外,随着信息化进程的加快而兴起的网络空间安全问题对于海事活动安全性具有重要意义,也应在智能船舶系统中给予特别重视。
3.3 智能船舶的发展进路
实现智能化是船舶系统技术发展的未来目标。尽管 e-Nav 和智能船舶等新兴概念为海事业和船舶工业提供了发展远景,但其进路上的自动化、信息化等前续阶段并不能被跨越。
着眼现阶段,国际上针对海事活动安全和环保的要求日趋严格。近年来,IMO 关于船舶节能减排等问题的规则(包括船舶能效设计指数 EEDI、船舶能效管理计划 SEEMP 等)相继出台。徐绍衡[21]指出,强制性节能与环保的指标多依靠船舶和设备的优化设计和自动化控制技术实现。从张信学等[22]对绿色船舶技术发展的战略研究中也可看出这一特征。
而另一方面,智能船舶的理念虽不能“包治百病”,但在船舶和配套设备技术的发展中,充分融合信息化技术,提升产品的信息化程度,为整个船舶系统的运行和优化提供支持,将是智能船舶实现的过程中的重要手段。
4 结 语
从某种意义上讲,航运领域中诞生了原始的“智能交通”:有历史记载以前,水手就开始使用导航工具从事航海活动;20 世纪初,航运业即成为全球最早获得无线电频率分配的行业;航运是全球最早启用卫星导航系统的民用领域之一;防撞雷达和自动识别应答器分别于 1974 年和 2002 年成为船舶必备设备[22]。而随着船舶工业和航运业的发展,应用“智能”设备的目的也从最初的助航和增加船舶安全性逐渐衍生出对环保、经济性和可靠性等方面的更高需求,包括降低船舶控制和管理难度、减少人为误操作、提高设备及船舶营运的安全、优化船舶航行、控制燃油消耗、降低成本、提高收益等目的。因此,智能化对于船舶和航运业的未来具有重要意义。对我国而言,智能船舶在“中国制造 2025”战略中拥有举足轻重的地位,其发展关乎我国船舶工业和航运业在供给侧改革背景下的转型升级以及未来在全球的地位。
从某种意义上讲,航运领域中诞生了原始的“智能交通”:有历史记载以前,水手就开始使用导航工具从事航海活动;20 世纪初,航运业即成为全球最早获得无线电频率分配的行业;航运是全球最早启用卫星导航系统的民用领域之一;防撞雷达和自动识别应答器分别于 1974 年和 2002 年成为船舶必备设备[22]。而随着船舶工业和航运业的发展,应用“智能”设备的目的也从最初的助航和增加船舶安全性逐渐衍生出对环保、经济性和可靠性等方面的更高需求,包括降低船舶控制和管理难度、减少人为误操作、提高设备及船舶营运的安全、优化船舶航行、控制燃油消耗、降低成本、提高收益等目的。因此,智能化对于船舶和航运业的未来具有重要意义。对我国而言,智能船舶在“中国制造 2025”战略中拥有举足轻重的地位,其发展关乎我国船舶工业和航运业在供给侧改革背景下的转型升级以及未来在全球的地位。
对智能船舶的系统性研究和技术研究应相辅相成。智能船舶代表一种未来船舶的发展状态,文中提出的基于信息流的系统结构模型提供了一种与船舶平台无关的、抽象化的对系统运行原理的表征方法,对于从不同角度描述智能船舶系统相关问题时提供了一个有效的参考架构。但对应架构的数据互联互通关键问题,如系统集成、数据结构、通讯协议、网络安全机制、标准化等,以及如何对 e-Nav 实现更深度的融合和更有效的支撑,仍需进一步探索。
[1]IMO.maritime Safety Committee (MSC), 96th session, 11-20may 2016 (opening address)[EB/OL]. (2016-05-11). http://www.imo.org/en/MediaCentre/SecretaryGeneral/Secretary-GeneralsSpeechesToMeetings/Pages/MSC-96-opening.aspx.
[2]2015年海洋工程辅助船市场容量及发展趋势分析[EB/OL]. (2015-12-01). http://www.chyxx.com/industry/201512/ 363705.html.
[3]范维, 许攸. 日本率先拉开“智能船舶”国际标准化战略序幕[J]. 船舶标准化与质量, 2015(4): 39-40.
[4]严新平. 智能船舶的研究现状与发展趋势[J]. 交通与港航, 2016(1): 23-26.
[5]Development of an e-Navigation strategy (MSC 81/23/10)[R]. 81st Session ofmaritime Safety Committee, London: Internationalmaritime Organization, 2005.
[6]张铁军, 王玉林, 朱勇强, 等. e-航海概论[M]. 北京: 人民交通出版社股份有限公司, 2015. ZHANG Tie-jun, WANG Yu-lin, ZHU Yong-qiang, et al. An outline of e-Navigation[M]. Beijing: China Communications Press Co., Ltd., 2015.
[7]王隆太. 先进制造技术[M]. 北京: 机械工业出版社, 2003. WANG Long-tai. Advancedmanufacturing technology[M]. Beijing: Chinamachine Press, 2003.
[8]智能船舶规范2015[S]. 中国船级社, 2016. Rules for intelligent ships[S]. China Classification Society (CCS), 2016.
[9]贺辞. CCS《智能船舶规范》六大功能模块要求[J]. 中国船检, 2016(3): 84-85. HE Ci. The six functionalmodule requirements of CCS rules for intelligent ships[J]. China Ship Survey, 2016(3): 84-85.
[10]Smart ship application platformproject (SSAP)[EB/OL]. (2016-06). http://www.e-Navigation.net/index.php?page=ssapsmart-ship-application-platform.
[11]CHO S W. "Smartship"-the future ofmaritime innovation[C]//8th Asian Shipbuilding Experts' Forum. Jeju Island, Korea, 2014.
[12]PORATHE T, BURMEISTER H C, RØDSETH Ø J.maritime unmanned navigation through intelligence in networks: ThemUNIN project[C]//12th International conference on computer and it applications in themaritime industries (COMPIT).Cortona, Italy: COMPIT, 2013.
[13]Maritime unmanned navigation through intelligent in networks (MUNIN)[EB/OL]. (2016-05). http://http://www.unmannedship.org/munin/wp-content/uploads/2013/01/MUNIN-Brochure.pdf.
[14]WAKEFIELD J. Rolls-Royce imaginesafuture of unmanned ships[EB/OL]. (2014-03-05). http://www.bbc.com/news/technology-26438661.
[15]李予阳, 李治国. "中国造"世界首艘"会思考"船舶亮相 智能"基因"贯穿始终[EB/OL]. (2015-12-15). http://www.ce. cn/xwzx/gnsz/gdxw/201512/15/t20151215_7556929.shtml.
[16]Development of an e-Navigation strategy implementation plan (NAV 57/6)[R]. London: Internationalmaritime Organization, 2011.
[17]张祖国. 基于全制造服务周期的智能工厂系统结构模型[J].舰船科学技术, 2016, 38(5): 121-128. ZHANG Zu-guo. Research on systemarchitecturemodel of intelligent factory based on totalmanufacturing service lifecycle[J]. Ship Science and Technology, 2016, 38(5): 121-128.
[18]吴笑风, 岳宏, 石瑶, 等. 我国船舶产业智能制造及其标准化现状与趋势[J]. 舰船科学技术, 2016, 38(5): 1-6. WU Xiao-feng, YUE Hong, SHI Yao, et al. Current status and development trend of smartmanufacturing technology and standardization of China's shipbuilding industry[J]. Ship Science and Technology, 2016, 38(5): 1-6.
[19]柳晨光, 初秀民, 谢朔, 等. 船舶智能化研究现状与展望[J].船舶工程, 2016, 38(3): 77-84, 92. LIU Chen-guang, CHU Xiu-min, XIE Shuo, et al. Review and prospect of ship intelligence[J]. Ship Engineering, 2016, 38(3): 77-84, 92.
[20]曲全福, 陈志刚, 高洪宇. 新型综合船桥系统[J]. 中国惯性技术学报, 2011, 19(3): 325-328. QU Quan-fu, CHEN Zhi-gang, GAO Hong-yu. New integrated bridge system[J]. Journal of Chinese Inertial Technology, 2011, 19(3): 325-328.
[21]徐绍衡. 21世纪船舶自动化技术的最新发展[J]. 江苏科技大学学报(自然科学版), 2014, 28(6): 511-517. XU Shao-heng. The latest development of ship automation technology in twenty-first century[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2014, 28(6): 511-517.
[22]张信学, 赵峰, 王传荣, 等. 绿色船舶技术发展战略研究[J].中国工程科学, 2016, 18(2): 66-71. ZHANG Xin-xue, ZHAO Feng, WANG Chuan-rong, et al. Research on the development strategy of green ship technology[J]. Engineering Sciences, 2016, 18(2): 66-71.
[23]RØDSETH Ø J. Amaritime ITS architecture for e-Navigation and e-Maritime: supporting environment friendly ship transport[C]//Proceedings of the 14th IEEE International Conference on Intelligent Transportation Systems. Washington, DC, USA: IEEE, 2011: 1156-1161.
Systemmodel for intelligent ships: an information flow oriented representation
WU Xiao-feng1, ZHANG Zheng-hai2, XU You1, FAN Wei1, SHI Yao1, YUE Hong1
(1.The 714 Research Institute of CSIC, Beijing 100101, China; 2.Bohai Sea Shipping Heavy Industries Co., Ltd., Huludao 125004, China)
Intelligent ship represents the future trend of the ship industry. It caters to the IMO rules and regulations as well as the interests of ship-owners and other stakeholders bymaking shipping safer,more environment-friendly,more economic andmore reliable through the intelligentization of ships. Intelligent ship is characterized bymaximizing the use of data and information on both the ship-side and the shore-side, together with highly efficiently exchanging thembetween the two sides, allowing optimized shipping operations. This paper proposes an information flow oriented and platformindependent systemmodel for intelligent ships, taking into account its compatibility with the IMO's e-Navigation architecture. Issues including the collection, processing, exchange and application of the data and information on both the ship-side and shore-side are considered in themodel, providingauniversal information flow oriented interpretation for describing intelligent ship systems.
intelligent ships;intelligent system;e-navigation;systemarchitecturemodel;information flow
U66
:A
1672 - 7619(2016)10 - 0014 - 06
10.3404/j.issn.1672-7619.2016.010.003
2016 - 06 - 07;
2016 - 07 - 29
吴笑风(1986 - ),男,博士,工程师,研究方向为系统工程及船舶海洋技术标准化等。
猜你喜欢
船舶(2021年4期)2021-09-07 17:32:22
军事运筹与系统工程(2020年1期)2020-09-11 06:41:08
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
铁道通信信号(2018年12期)2019-01-31 05:36:40
文苑(2018年23期)2018-12-14 01:06:06
军事运筹与系统工程(2018年1期)2018-11-10 05:33:12
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
