
基于元胞自动机城市道路缩减区驾驶行为分析
2016-04-22 02:52:54龙科军黄奕皓肖向良杜玉灿
徐州工程学院学报(自然科学版) 2016年1期
关键词:元胞自动机
龙科军,黄奕皓,肖向良,2,杜玉灿,李 峰
(1.长沙理工大学 交通运输工程学院,湖南 长沙 410114;2.湖南省建筑设计院,湖南 长沙 410011)
基于元胞自动机城市道路缩减区驾驶行为分析
龙科军1,黄奕皓1,肖向良1,2,杜玉灿1,李峰1
(1.长沙理工大学 交通运输工程学院,湖南 长沙410114;2.湖南省建筑设计院,湖南 长沙410011)
摘要:针对城市道路缩减区造成的拥堵问题,通过对长沙城市道路缩减区进行数据采集与分析,得到缩减区的运行特征参数,如车头间距、车速、最大车速、高峰小时流量以及缩减区内车辆换道比例等驾驶行为特征值,并结合调查数据对元胞自动机模型进行参数标定.采用标定后的元胞自动机对两类缩减区进行仿真实验,得到不同密度情况下车道缩减区内的车辆换道比例和换道次数,确定出对道路交通影响最大的密度区间.
关键词:车道缩减区;元胞自动机;驾驶行为;交通仿真
城市缩减区的形成是由于城市道路路幅变窄导致车道急剧减少而形成的[1],在城市的桥梁、涵洞或者施工区比较常见.城市缩减区对交通流的影响是显而易见的,主要体现在两个方面:1)缩减区本身车道的减少导致缩减区位置的通行能力与前后道路不一致,通行能力的不足造成交通流在此集聚,形成交通拥堵;2)驾驶员面对缩减区车道的中断需要变换车道,而换道概率的增加则严重影响车辆行驶速度,进一步加快拥堵的形成.目前,国内外对缩减区的研究主要集中在高速公路上因施工而形成的缩减区,Jin等[2]通过研究高速公路合流区的流量与速度关系模型以及合流区驾驶员的行为特性,认为合流区在非拥挤条件下流量与速度关系受车辆驾驶行为的影响较大;陈雅等[3]构建了城市快速路施工区的交通模型,通过计算机仿真模拟了施工区交通通行,研究了城市快速路施工区道路的通行能力;李喜华[4]从实际调查入手分析了城市道路占道施工区交通流特性,通过选取饱和度、平均行驶速度、平均行程延误、单位里程平均停车次数等指标建立了车道缩减区的服务水平评价标准,并利用VISSIM仿真软件进行了评价;郭啸峰[5]通过调查研究城市道路施工占道缩减区交通流的特性,利用元胞自动机Nash模型进行仿真,定量定性分析了施工路段的交通流特性.基于此,本研究通过实地采集车道缩减区内驾驶行为数据,引入交通元胞自动机(CA)模型[6-8],利用Matlab编写元胞自动机程序,模拟车道缩减区内的驾驶行为,并通过仿真模拟了车道缩减区的交通运行规律,以求为车道缩减区的设计、交通组织管理与控制方案评价提供可行的工具.
1车道缩减区驾驶行为特征调查与分析
通过对长沙市内城市道路的实地调查,共选取了2个调查点,即新开铺路湘府路大桥段、书院路南湖路段分别调查2车道缩减至1车道、3车道缩减至2车道.
第1个调查点为书院路湘府路大桥段.由于湘府路大桥的修建,原有单向3个车道,渐变为2个车道后,最终以1个车道通行.在实际调查时,由于视野与距离限制,只能拍摄到车道由2车道渐变为1车道段,因此主要调查车道由2个缩减至1个的区域.如图1所示.
第2个调查点为书院路南湖路段.由于南湖路隧道的修建,道路在到达隧道引道段时,进行了1个车道的缩减,书院路由单向3车道缩减至2个车道.如图2所示.
1.1调查内容和方法
本次调查的主要内容包括车辆的平均行驶速度、平均车头间距、车辆换道间距.车辆的平均行驶速度是车辆在道路行驶的一个基本指标,是指车道缩减区长度与车辆在车道缩减区内行驶的时间比值,取平均值;最大行驶速度表示车辆在缩减区域内可行驶的最大速度;平均车头间距表示车辆在车道缩减区内车辆跟驰的平均车头间距;车辆换道间距是指在车道缩减区内车辆在换道时与即将转入的目标车道前车之间的距离;车辆换道车速是指在车道缩减区内车辆换道进入目标车道时所行驶的距离与所需要的时间之间的比值.选取正常工作日的早、晚高峰时段对选定的车道缩减区进行调查;为方便计数处理,采用视频摄像法;对调查数据以高峰小时交通量的统计区间进行计算处理.

图1 2车道缩减区调查图

图2 3车道缩减区调查图
1.2调查结果分析
1.2.12车道缩减区
1)车道缩减区车辆平均行驶速度范围在26.7~45.6 km/h,车辆平均行驶速度统计均值为36.8 km/h.平均行驶速度集中在30~40 km/h的范围内的车辆数达到626辆,占统计车辆数的53.7%;小于30 km/h的车辆数为157辆,占统计车辆数的13.5%;平均行驶速度大于40 km/h的车辆数达到328辆,占总车辆数的32.8%.车辆平均行驶速度分布情况见表1.

表1 车辆平均行驶速度分布统计表
2)平均车头间距分布.车辆车头间距在15~40 m之间,统计平均车头间距为28.3 m,车头间距集中分布在25~30 m之间,数量为368辆,占统计车辆的31.6%;其次是30~35 m之间,数量为284辆,所占比例为24.4%;车头间距小于20 m的车辆数较小,未超过统计车辆数的10%.车辆平均车头间距分布见表2.
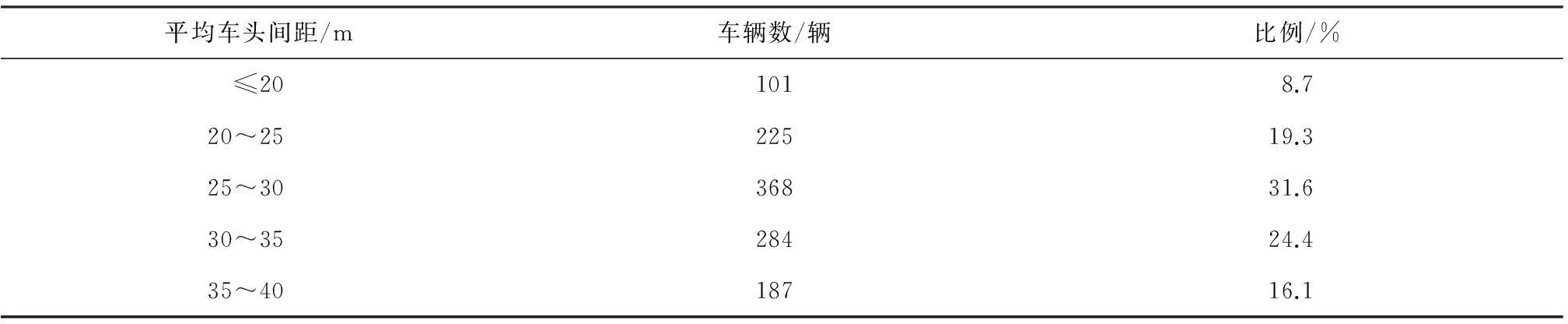
表2 车辆平均车头间距分布统计表
3)平均换道间距分布.车辆换道间距在35 m以上,统计平均换道间距为48.6 m;换道间距车辆数最多的区间在45~50 m之间,为70辆,占统计车辆的26.9%;其次是40~45 m之间,数量为65辆,所占比例为25.0%;换道间距小于40 m和大于55 m的车辆数比例均较高.换道间距在各个区间上总体上分布较为均衡,见表3.

表3 车辆平均换道间距分布统计表
1.2.23车道缩减区
1)平均车速分布.车道缩减区车辆平均行驶速度的范围在35.1~52.6 km/h,车辆平均行驶速度统计均值为42.6 km/h.平均行驶速度主要分布在35~45 km/h的范围内,车辆数达到1710辆,占统计车辆数的67.4%;大于50 km/h的车辆数为172辆,占统计车辆数的6.8%;平均行驶速度在45~50 km/h之间的车辆数为654辆,占总车辆数的25.8%.车辆平均行驶速度分布见表4.

表4 车辆平均行驶速度分布统计表
2)平均车头间距分布.车辆车头间距在25~50 m之间,统计平均车头间距为36.2 m,车头间距车辆数较多地分布在30~35 m之间,数量为1028辆,占统计车辆的40.5%;其次是35~40 m之间,数量为807辆,所占比例为31.8%,车头间距小于30 m和大于45 m的车辆数均较少,未超过统计车辆数的10%.车辆平均车头间距分布见表5.
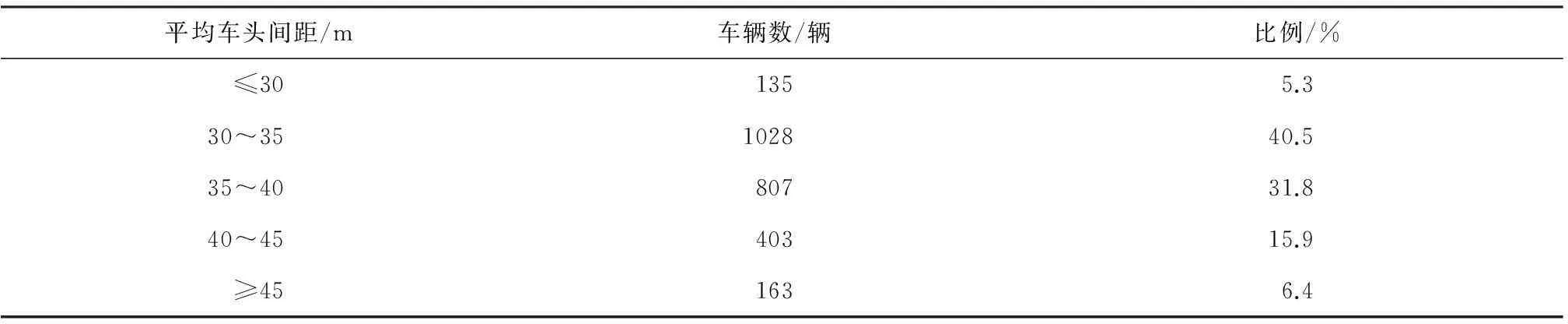
表5 车辆平均车头间距分布统计表
3)平均换道间距分布.车辆换道间距在40 m以上,统计平均换道间距为51.4 m,换道间距车辆数分布最多的区间在45~50 m之间,为169辆,占统计车辆的40.0%;其次是50~55 m之间,数量为116辆,所占比例为27.4%;换道间距小于45 m和大于60 m的车辆数比例均较低,未超过统计车辆数的10%.车辆平均换道间距分布见表6.
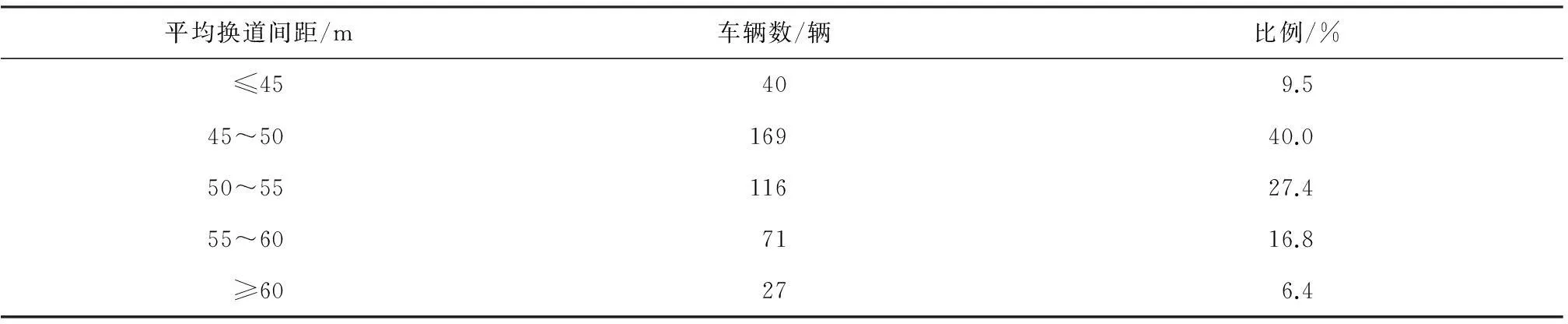
表6 车辆平均换道间距分布统计表
2模型构建
2.1道路分段
假定道路是从外边车道进行的缩减,由外边车道依次往里对车道进行编号(L1,L2,L3,…,Li);道路分为3个部分:M0、M1和M2段,M0为正常路段,其中M1段为车道渐变的缩减区段,M2段为缩减车道后的路段.道路分段如图3所示.
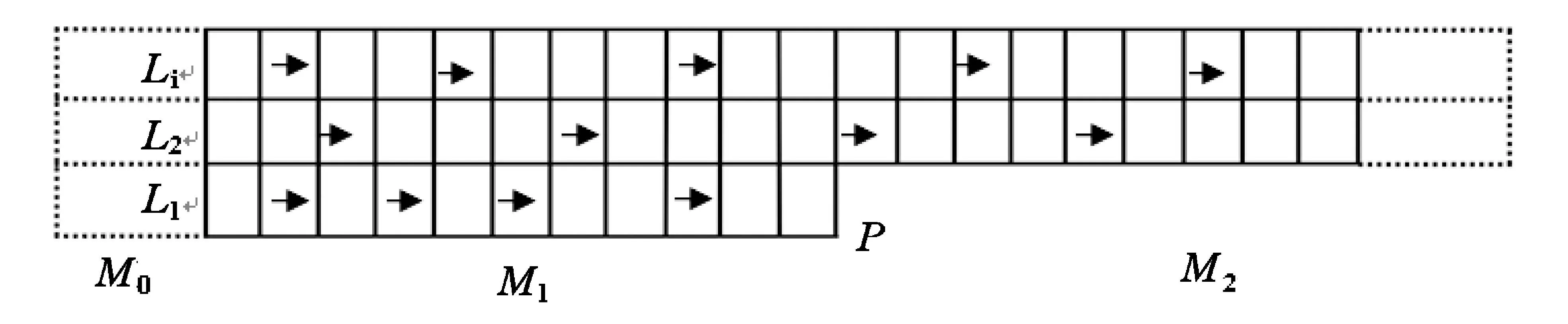
图3 道路分段示意图
2.2基本假设
2.2.1车辆跟驰
在车辆行驶过程中,车辆在换道受到限制的情况下,总是希望自己的车辆与前车在一个恰当的距离内紧随前车行驶,而这个恰当的距离便是车辆行驶过程为实现安全行驶所采用的期望跟车间距.车辆在跟驰过程[9-11]中有3个假设条件:
1)车辆在跟驰过程中的加减速行为,取决于与前车之间的距离,车辆行驶无随机加减速情况.
2)元胞格点长度选取考虑车辆的最小间距,静止的车辆中间的间距可以为0,另外以某个速度点区分较低速度行驶车辆与高速行驶车辆.
3)为保证车辆同步行进更新,假定每辆车驾驶员操控车辆,即“人-车共同体”的反应时间小于仿真间隔.
2.2.2车辆换道
车辆换道分为两类,即对称换道和非对称换道,亦可称为自由换道和强制换道[12-15].其基本假定为:
1)车辆只有在低速或静止状态的情况下需要进行换道,而高速行驶的车辆需先减速后再进行换道.
2)车辆在正常路段M0与缩减后的路段M2可以实施对称的自由换道,不论是静止的车辆还是行驶中的车辆都可以结合换道条件进行换道.
3)在缩减区M1段,对于静止的车辆可以实现自由换道,而对于行驶的车辆在换道时总是优先考虑向远离被缩减车道上的车辆换道,而处于被缩减车道邻近的第1个车道上的车辆不能向被缩减车道上换道.
4)已在被缩减区道路上静止的车辆,只要邻侧车道上空位数大于1个时间间隔内车辆的最大行驶距离即进行换道.
2.3模型规则
2.3.1车辆行驶状态检测
1)高速行驶的车辆.如果一辆车与前车的间距大于等于高速行驶车辆的期望跟车间距,则在下一个时间仿真间隔内将该车定义为高速运行车辆,以最大速度行驶,即如果gapij≥gapsg,则Aij=2,Vij=Smax.
2)低速或减速行驶的车辆.如果一辆车与前车的间距大于0且小于高速行驶车辆的期望跟车间距,则将该车定义为低速行驶车辆,以平均行驶速度行驶,即如果gapij
3)静止的车辆.如果一辆车与前车的距离为0,则该车静止,即如果gapij=0,则Aij=3,Vij=0.
2.3.2运行规则
根据车辆行驶的基本假设条件,车辆的行驶遵循以下规则:



3)车辆换道后,各车道车辆位置更新.对于低速或减速行驶的车辆,按平均行驶距离向前移动格点,即若Aij=1,则xij(t+dt)→xij(t)+Sp;对于加速或高速行驶的车辆,按最大行驶速度向前移动格点,即若Aij=2,则xij(t+dt)→xij(t)+Smax.
3车道缩减区交通仿真分析
3.1交通仿真软件
根据元胞自动机模型,采用标定参数,利用Matlab软件自编仿真程序,对车道缩减区进行交通仿真[16],如图4所示.图中右侧连续黑色区域表示缩减区后的路段,车辆由左向右行驶;内侧车道缩减,缩减区域为黑色区域往左20个格子的距离,颜色与普通道路一致,仅改变车辆在此区域的换道规则;黑色散点表示有车辆占据.

图4 车道缩减区仿真示意图
3.2驾驶行为特征结果分析
3.2.12车道缩减区
经仿真,得到2车道缩减区换道换道比例和换道次数与密度的关系,如图5所示.
图5 2车道缩减区换道情况图
2车道缩减区换道的比例与次数有一个极大值与极小值,换道次数先随密度的增加而增大,到达极大值后,换道次数随密度的增加而迅速下降,取得极小值,之后换道次数与密度之间呈现出正比例函数的线性关系.2车道缩减区换道比例的极大值在密度为24.6辆/km时取得,此时的换道比例和次数分别为32.4%和374次;极小值在密度为27.5辆/km处取得,此时对应的换道比例和次数分别为23.2%和262次,对应的流量分别为1090辆/h和1140辆/h,对应的速度分别为44.3 km/h和41.5 km/h.
当密度小于24.6辆/km时,2车道缩减区车辆行驶基本不受缩减区的影响,车辆换道处于一个相对自由状态;当密度处于24.6~27.5辆/km,车辆换道受到缩减区的影响,缩减区的换道比例随着密度的增加急速下降,说明未被缩减的车道通行处于明显优势状态,处于被缩减车道的车辆换道难度增加,车辆在缩减区换道的机会减少,导致车辆在缩减区选择被缩减车道行驶的数量下降;当密度大于27.5辆/km时,随着道路上车辆数的增加,缩减区逐渐拥堵,更多的车辆被迫选择被缩减的车道,随着密度的增加,车辆行驶的速度降低,缩减区2个车道上的车辆相互干扰增强.
因此,从车辆在缩减区行驶的有序性分析,2车道缩减区当密度处于24.6~27.5辆/km、流量处于1090~1140辆/h的区间时,车辆在缩减区通行的有序性较好,且车辆行驶速度较高.
道路总换道与密度的关系如图6所示.从整条道路来看,车辆换道总次数与比例随密度的升高而不断增加,抵达某个峰值后,随着密度的增加而减少.车辆换道次数最大比例为101.5%,换道总次数达到1322次,此时对应的密度为62辆/km,流量为1239辆/h,速度为20 km/h,相比车道缩减区换道的极大和极小值密度要高出1倍多,同时速度降低也达50%以上.
图6 2车道路段总换道情况图
当路段上车道缩减区车辆的行驶受到影响时,整条道路的换道频率并没有达到峰值,而是在密度继续增长,以致于超过最佳密度后,整条道路车辆的换道次数才抵达峰值,这说明缩减区对道路的影响主要在拥挤条件下车辆选择缩减车道行驶的数量增加,但随着密度的进一步增大,整条道路处于阻塞状态,随着阻塞程度的加剧,车辆行驶的速度降低,2车道之间可以换道的机会减少,车辆换道的次数与比例下降.对整条道路而言,2车道缩减区在密度小于62辆/km的情况下,虽然车辆换道次数随密度不断增加,但道路虽然拥挤却并没非常明显的阻塞,而当密度大于62辆/km后,车辆速度下降到20 km/h以下,道路处于阻塞状态,车辆换道空间不足,总体换道比例下降,因此,将2车道缩减区密度控制在62辆/km以下时,对道路的通行有利.
3.2.23车道缩减区
经仿真,3车道缩减区的换道次数与比例开始随着密度的增加而增加,当密度到达40辆/km后,缩减区的换道比例开始下降,在密度抵达52辆/km时,出现第1个极小值,之后换道比例处于平稳状态,在密度为62辆/km之后,换道比例出现时高时低的波动现象.这说明在密度小于40辆/km时,缩减区的车辆可以较自由的选择车道,而在密度为40~52辆/km之间时,车辆开始选择被缩减车道外的其它2条车道行驶.随着密度的增加,选择不变车道行驶的车辆比例越高,缩减区车辆的换道比例逐渐下降,在密度为52辆/km时,车辆在缩减区选择未缩减车道行驶的比例达到一个极值点;在密度为52~62辆/km之间,车辆行驶开始受到限制,更多的车辆被迫选择缩减车道行驶,换道比例开始逐渐上升,但浮动较小;当车辆大于62辆/km时,车辆在缩减区的换道受到极大的限制,往往出现由一个车道的车辆全部换道另一车道行驶,或者被缩减车道上的车辆无有效空间换道的情况,而造成换道次数的大幅度波动现象.3车道缩减区换道情况如图7所示.

图7 3车道缩减区换道情况图
对于3车道缩减区,当密度为40辆/km时,车辆换道比例为51.7%,此时的流量为2484辆/h,速度为62.8 km/h;当密度为52辆/km时,车辆换道比例为20.9%,对应的流量为2687辆/h,速度为51.6 km/h;当密度为62辆/km时,车辆换道比例为23.64%,此时的流量大小为2833辆/h,速度为45.5 km/h.对于3车道缩减区而言,当密度处于40~52辆/km时,对车辆的行驶有利(此时车辆通行较为有序,车辆可以有较高的速度通行,且流量较大).
道路总换道与密度的关系如图8所示.从3车道缩减区整条道路的角度分析,随着密度增加,道路上的换道比例逐渐升高,当密度大于52辆/km时,道路上车辆的换道比例开始出现时高时低的小幅度不稳定性的波动增长;当密度大于75辆/km时,道路上车辆的换道比例出现大幅度波动,呈极不稳定状态;当密度为52辆/km时,车辆的换道比例为87.2%,当密度为75辆/km时,车辆的换道比例为162%,此时的流量大小为2820辆/h,速度为37.7 km/h.这说明在密度小于52辆/km的情况下,道路上的车辆行驶受到缩减区的影响较小,在密度为52~75辆/km的情况下,道路上的车辆行驶受到了缩减区一定的影响,车辆换道比例开始出现小幅度波动;在密度大于75辆/km时,车辆的行驶受到了极大制约,整条道路都受到缩减区的影响,车辆换道出现了大幅的波动.因此,在3车道缩减区,就整条道路而言,车辆的密度处于75辆/km以下时,可以减少车辆的行驶对缩减区的影响,有利于道路的通行.

图8 3车道路段总换道情况图
4结论
针对城市道路较常见的缩减区,建立元胞自动机模型,分析2个不同类型车道缩减区在不同密度情况下的换道次数和换道比例,得到对缩减区影响最大的密度区间.主要结论有:
1)当密度小于24.6辆/km时,二车道缩减区的换道率随着密度的增加而增加;当密度为24.6辆/km时,换道率与密度之间出现极大值,此时换道率为32.4%,换道次数为374次,流量为1090辆/h;随着密度的增加,换道率呈一定比例下降,密度为27.5辆/km时出现极小值,此时换道率为23.2%,换道次数为262次,流量为1140辆/h.
2)2车道缩减区的换道总数在密度为62辆/h时出现极值,此时流量为1239辆/h;当密度大于62辆/h时,换道总数下降;当车辆受到缩减区的影响时,换道总数并没有达到最大值,而是超过最佳密度时才达到.
3)2车道缩减区的密度小于24.6辆/h时,车流属于自由流,行驶不受车道缩减的影响;密度属于24.6~27.5辆/h时,车辆的行驶慢慢受到缩减区的影响,车辆不得不利用被缩减车道;密度大于27.5辆/h时,缩减区交通逐渐拥堵.
4)3车道缩减区换道率随着密度的增大而增加,达到40辆/km,此时出现极大值,对应的换道率为51.7%,流量为2484辆/h,速度为62.8 km/h;当密度为40~52辆/km时,换道率与密度呈负比例;当密度为52辆/km时,换道率为20.9%,流量为2687辆/h,速度为51.6 km/h.
5)3车道缩减区换道比例与密度成正比例关系.当密度大于52辆/km时,换道比例出现小幅度的不稳定状态,说明此时行车受到缩减区的影响;当密度大于75辆/km时,换道比例出现大幅度波动的极不稳定状态,此时行车受到缩减区的极大制约.
6)2车道缩减区的密度为24.6~27.5辆/km之间时,缩减区的行车有序性最佳;3车道缩减区的密度为40~52辆/km之间时,缩减区的有序性为最佳,不会出现交通拥堵.
本研究仅仅是考虑城市道路车道缩减这一因素对车辆的驾驶以及道路交通运行的影响,构建的模型相对简单.城市道路交通系统是极为复杂多变的,为了更为接近实际道路车辆运行的状况,模型还需要考虑混合交通、人为因素以及其它基础设施条件(如非机动车道、指示标志等)等对车辆运行的影响,而对这些问题则需要进一步的分析与研究.
参考文献:
[1] 谭小灵,杨葛飚.道路施工对城市交通影响的分析和对策研究[J].城市道桥与防洪,2005(3):110-113.
[2] JIN S,WANG D,XU C,et al.Staggered car-following induced by lateral separation effects in traffic flow[J].Physics Letters A,2012(3):153-157.
[3] 陈雅,邵长桥.城市快速路施工区通行能力研究[J].道路交通与安全,2010,10(1):53-56.
[4] 李喜华.城市占道施工对路段交通影响的研究 [D].北京:北京交通大学,2011.
[5] 郭啸峰.城市占道施工区交通流特性分析及仿真研究[D].北京:北京交通大学,2012.
[6] 周茂松,吴兵,盖松雪.高速公路养护维修作业区通行能力影响因素的微观仿真研究[J].交通与计算机,2005,22(6):54-57.
[7] 刘有军,曹珊.基于元胞自动机的强制换道模型研究[J].交通信息与安全,2009(3):78-80.
[8] 薛飞,钟诚文,白存儒.局部车道缩减的双车道元胞自动机交通流模型研究[J].系统仿真学报,2010(5):1114-1116.
[9] 王殿海,金盛.车辆跟驰行为建模的回顾与展望[J].中国公路学报,25(1):115-127.
[10] 李林波,吴兵,潘弘,等.城市道路路段拥挤交通流特性研究[J].山东交通学院学报,2010(1):13-16.
[11] 曹宝贵,杨兆升.一种改进的车辆跟驰动力学模型[J].华南理工大学学报(自然科学版),2011,39(10):96-99.
[12] 许伦辉,罗强,吴建伟,等.基于最小安全距离的车辆跟驰模型研究[J].公路交通科技,2010,27(10):95-100.
[13] 许伦辉,胡三根,罗强,等.基于驾驶员类型的车辆换道模型[J].华南理工大学学报(自然科学版),2014,42(8):104-111.
[14] 王崇伦,李振龙,陈阳舟,等.考虑换道约束空间的车辆换道模型研究[J].公路交通科技,2012,29(1):121-127.
[15] 孙德辉,杨凯.基于信息交互的元胞自动机车辆换道行为模型研究[J].中国外资,2010(10):237-238.
[16] 肖向良.城市道路车道缩减区驾驶行为特征及交通仿真研究[D].长沙:长沙理工大学,2014.
(编辑徐永铭)
Analysis of Driving Behaviors in the Urban Lane-decreasing Zone Based on Cellular Automaton
LONG Kejun1, HUANG Yihao1, XIAO Xiangliang1,2, DU Yucan1, LI Feng1
(1.Changsha University of Science and Technology School of transportation engineering,Changsha 410114, China;2.Hunan Provincial Architectural Design Institute,Changsha 410011, China)
Abstract:In order to solve the traffic jam caused by the lane-decreasing zone and provide the effective organization and management,the data of Changsha was collected and analyzed to obtain the operation parameters and driving behavior characteristics value,such as the front pitch,speed,maximum speed,rush hour traffic and lane changing proportion etc.Then the model parameter calibration of cellular automata was set and put into the simulation experiment to obtain the ratio and times of lane-changing under the different density of the decreasing zone and thus the maximum density range with greatest impact on road traffic was determined.
Key words:lane-decreasing zone; cellular automata; driving behavior; traffic simulation
中图分类号:U491.1
文献标志码:A
文章编号:1674-358X(2016)01-0033-09
作者简介:龙科军(1974-)男,教授,博士,硕士生导师,主要从事交通运输系统规划与组织研究.
基金项目:江西省交通运输科技计划项目(2013C0008)
收稿日期:2015-11-05
猜你喜欢
无线互联科技(2017年7期)2017-06-23 18:28:43
无线互联科技(2017年10期)2017-06-22 00:16:09
物联网技术(2017年3期)2017-03-30 12:23:39
数学学习与研究(2017年5期)2017-03-29 09:28:00
筑路机械与施工机械化(2016年11期)2017-02-05 20:49:54
数字技术与应用(2016年9期)2016-11-09 22:38:29
考试周刊(2016年62期)2016-08-15 07:16:20
科技视界(2016年13期)2016-06-13 17:54:06
科技与创新(2016年9期)2016-05-28 19:25:18
软件导刊(2015年9期)2015-10-09 06:22:22
