基于图解法的三轴车辆操纵稳定性分析
2016-04-15 11:25刘西侠刘维平
振动与冲击 2016年4期
刘西侠, 袁 磊, 刘维平
(装甲兵工程学院 机械工程系, 北京 100072)
基于图解法的三轴车辆操纵稳定性分析
刘西侠, 袁磊, 刘维平
(装甲兵工程学院 机械工程系, 北京100072)
摘要:三轴车辆车身长、轴载大、行驶工况复杂,这使得三轴车辆的操纵稳定性相对较差。考虑轮胎侧偏角超过5°后,轮胎呈现出较强的非线性特性,分别在线性域和非线性域内对车辆操纵稳定性进行分析。建立整车模型以及线性和非线性轮胎模型;在线性域内,基于根轨迹法研究某三轴车辆结构和状态参数对其操纵稳定性的影响;在非线性域内,基于相平面法分析三轴车辆操纵稳定性与其行驶工况的关系;最后,分析三轴全轮转向车辆的控制机理及其操纵稳定性,为三轴全轮转向车辆的设计和控制提供参考。
关键词:三轴车辆;操纵稳定性;根轨迹法;相平面法
三轴车辆与两轴车辆相比,由于轴数和质量的增加,高速行驶时转向失真严重,有必要对车辆的操纵稳定性进行深入研究,以提高车辆的操纵稳定性和行驶安全性。两轴车辆操纵稳定性的评价方法,主要是转向盘角阶跃输入的稳态响应和瞬态响应分析以及转向盘正弦输入的频率响应分析[1]。以上方法能够直观地反应车辆的稳态和动态性能,但所需曲线较多。韦超毅等[2]指出根轨迹法能够弥补该缺陷,并提出可通过根轨迹落在S平面上的位置来判断车辆操纵稳定性优劣。韦超毅等[3]进一步通过根轨迹法研究了拖挂式房车操纵稳定性的影响因素。以上研究表明根轨迹法能够较为直观和高效的分析车辆线性域的操纵稳定性。
三轴车辆行驶工况复杂,当其处于低附着路面转向、转向制动和转向加速工况时,轮胎呈现出较强的非线性特性。此时,基于线性理论的稳定性分析方法已不再适用[4-5]。对于两轴车辆,基于非线性理论的车辆稳定性分析和失稳机理研究是近年来的一个热点。文献[5-7]中提出可通过相平面法判断车辆的稳定状态。盖玉先等[5]分别利用质心侧偏角-横摆角速度相平面和质心侧偏角-质心侧偏角速度相平面对车辆侧向稳定性进行了研究。以上研究表明相平面法能够直观地反应出车辆非线性域的操纵稳定性[6-7]。
本文将两轴车辆中好的研究成果应用到三轴车辆上,利用图解方法全面分析三轴车辆的操纵稳定性。首先建立三轴车辆整车模型以及线性和非线性轮胎模型。基于根轨迹法,研究车辆处于线性域内的操纵稳定性影响因素。基于相平面法,研究车辆处于非线性域的操纵稳定性。最后,对某三轴全轮转向车辆的控制机理和高速稳定性进行研究。这些研究对于三轴车辆结构参数优化以及全轮转向控制系统设计具有一定的参考意义。
1车辆数学模型
1.1整车模型
车辆操纵稳定性分析中常用的模型为二自由度车辆模型,如图1所示,图中:O-X-Y为地面坐标系,O-x-y为车辆坐标系,β为车辆质心侧偏角,wz为车辆横摆角速度,vx为车辆车速,li(i=1,2,3)车辆质心到各轴的距离,φ为车辆横摆角,ψ为车辆航向角。对车辆进行受力分析,可得数学模型为:
(1)
式中:m为车辆总质量,Iz为车辆横摆转动惯量,Fyi(i=1,2,3)为各轮胎侧向力。
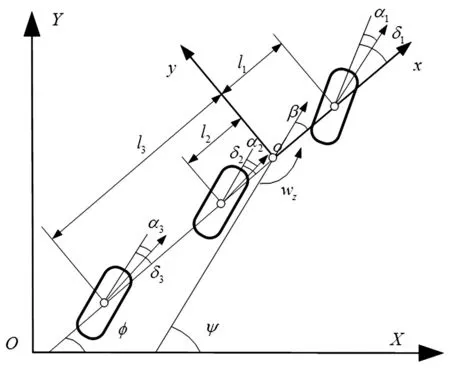
图1 二自由度车辆模型Fig.1 The vehicle model of two-degree freedom
1.2轮胎模型
当轮胎侧偏角处于5°以下时,轮胎呈现线性特性。其线性轮胎模型如:
Fyi=Cyi(δi-β-liwz/vx)
(2)
式中,Cyi为轮胎侧偏刚度。
当轮胎侧偏角超过5°较大时,轮胎呈现出非线性特性,采用Dugoff非线性轮胎模型如:
(3)
其中:
式中:Cxi为轮胎纵向刚度,Fzi为轮胎垂直载荷,μi为地面附着系数,Si为轮胎纵向滑移率。
式(2)和式(3)中,轮胎侧向力与侧偏角的关系,如图2所示。图中:对于非线性轮胎模型,当轮胎侧偏角超过5°后,轮胎呈现出非线性特性。

图2 轮胎侧向力变化曲线Fig.2 The curve of tire lateral force
2根轨迹法分析
当轮胎处于线性域时,线性理论的分析结果对于车辆设计与评价具有较强的参考价值。以某三轴车辆为基准车,基于根轨迹法研究三轴车辆的操纵稳定性影响因素[8]。
2.1根轨迹法
根轨迹法是指通过图解方法表示线性系统特征根与某一系统参数关系的方法,可通过根轨迹(特征根位置移动在s平面上形成的轨迹)位置直观判断系统瞬态响应特性,如图3所示。系统稳定性条件为:系统特征根位于s平面的左半平面。图3中,系统阻尼比ξ=cosθ,阻尼比代表系统的反映速度和超调量,阻尼比小,反映速度快,超调量大;系统圆频率wn为矢径,圆频率代表系统的恢复能力,圆频率越大,过渡时间越短;而ξwn表示系统的稳定裕度,该值越大,系统越稳定,过渡时间越短。
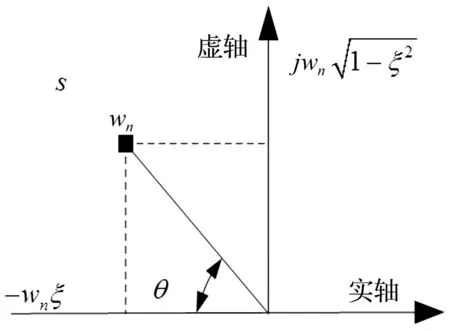
图3 s平面及特征根位置Fig.3 The s plane and position of characteristic root
2.2操纵稳定性影响因素研究
车辆操纵稳定性的研究可分为稳态响应特性和瞬态响应特性研究。车辆稳态响应特性通常用稳定性因素和稳态横摆角速度增益进行评价,较为容易。在此主要讨论车辆稳态前的动态过程,即瞬态响应特性。采用根轨迹法对车辆的瞬态响应特性进行研究。
2.2.1车速对瞬态响应特性影响
图4给出了基准车速为20 m/s,车速在10 m/s~30 m/s范围内变化的系统根轨迹图。图4中:① 随车速的增加,系统阻尼比先保持不变而后逐渐减小,说明系统反应速度和超调量先保持不变而后逐渐增加;② 随车速的增加,系统的圆频率先减小而后逐渐增大,说明系统过渡时间先增加而后减小;③ 随车速的增加,系统的稳定裕度逐渐减小,系统稳定性逐渐降低。同时,车速高于基准车速时,车速的增加虽然导致了系统的过渡时间减小,但系统的超调量增加,车辆总体稳定性降低。因此,车辆以较高车速行驶时,其车辆操纵稳定性并不好。
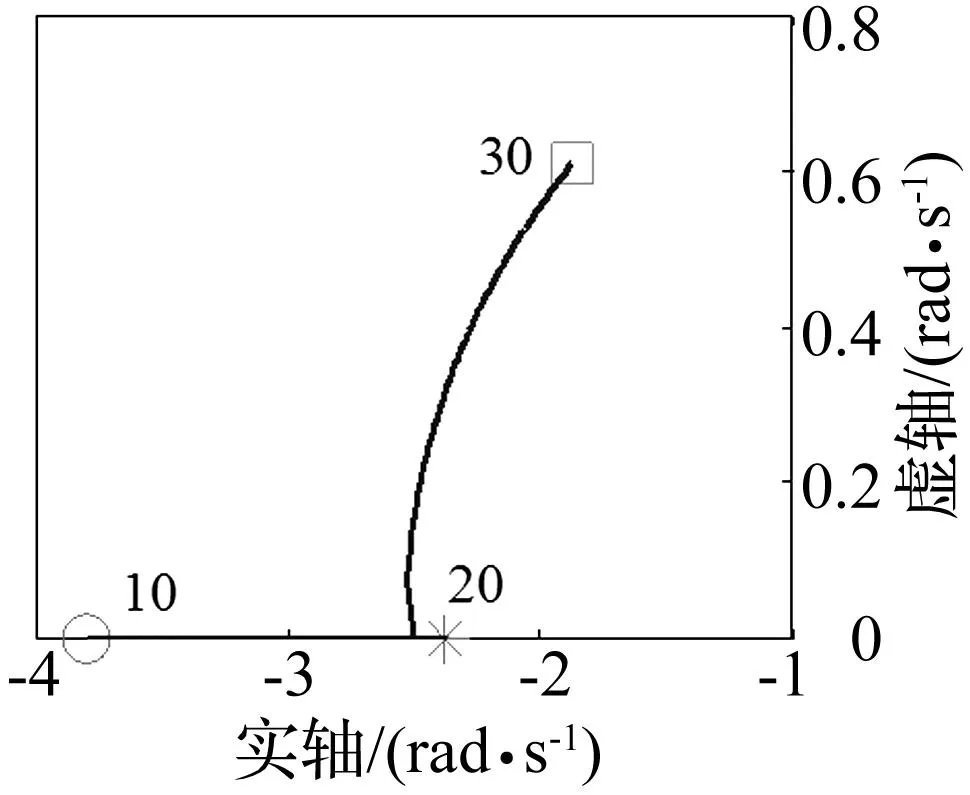
图4 车速变化的根轨迹图Fig.4 The root locus of changing speed
2.2.2质量对瞬态响应特性影响
图5给出了基准质量为15 800 kg,车辆质量在7 900 kg~23 700 kg范围内变化的系统根轨迹图。图5中:① 随质量的增加,系统阻尼比先保持不变而后逐渐减小,说明车辆反应速度和超调量先保持不变而后逐渐减小;② 随质量的增加,系统圆频率也是先增加后减小,说明系统过渡时间先减小后增加;③ 随质量的增加,系统的稳定裕度先增加后减小。同时,在选定基准质量附近,适当增加车辆质量,虽然系统超调量不变,但系统过渡时间减小,车辆稳定性增加。但是进一步增加质量后,系统超调量和过渡时间都将增大,车辆稳定性大幅降低。因此,车辆应尽量避免大幅超载。

图5 质量变化的根轨迹图Fig.5 The root locus of changing mass
2.2.3横摆转动惯量对瞬态响应特性影响
图6给出了基准横摆转动惯量为79 780 kg/m2,横摆转动惯量在39 890 kg/m2~119 670 kg/m2范围内变化的系统根轨迹图。图6中:① 随横摆转动惯量的增加,系统阻尼比先大幅增加而后保持不变,说明车辆反应速度和超调量先大幅度减小,而后保持不变;② 随横摆转动惯量的增加,系统的圆频率逐渐减小,说明系统过渡时间逐渐增加;③ 随横摆转动惯量的增加,系统的稳定裕度逐渐增加,说明系统稳定性逐渐增强。同时,在选定基准横摆转动惯量附近,增加车辆横摆转动惯量,系统超调量不变,但过渡时间增加,车辆稳定性降低。而适当减小车辆横摆转动惯量,系统过渡时间减小,车辆稳定性增加。因此,适当减小车辆横摆转动惯量有利于提高车辆操纵稳定性。

图6 横摆转动惯量变化的根轨迹图Fig.6 The root locus of yaw inertia
2.2.4前轮侧偏刚度对瞬态响应特性影响
图7给出了基准刚度为400 000 N/rad,前轮侧偏刚度在200 000 N/rad~600 000 N/rad范围内变化的根轨迹图。图7中:① 随前轮侧偏刚度的增加,系统阻尼比逐渐增加,车辆反应速度和超调量逐渐减小;② 随前轮侧偏刚度的增加,系统圆频率逐渐增加,说明系统过渡时间逐渐减小;③ 随前轮侧偏刚度的增加,系统的稳定裕度逐渐增加。同时,随前轮刚度的增加,车辆超调量和过渡时间都减小,车辆稳定性增加。因此,增加前轮侧偏刚度,有利于提高车辆操纵稳定性。

图7 前轮侧偏刚度变化的根轨迹图Fig.7 The root locus of the changing front wheel cornering stiffness
2.2.5中轮侧偏刚度对瞬态响应特性影响
图8给出了基准刚度为400 000 N/rad,中轮侧偏刚度在200 000 N/rad~600 000 N/rad范围内变化的根轨迹图。图8中:① 随中轮侧偏刚度的增加,系统阻尼比先增加后保持不变,说明系统反应速度和超调量先减小后保持不变;② 随中轮侧偏刚度的增加,系统圆频率逐渐减小,说明系统过渡时间逐渐增加;③ 随中轮侧偏刚度的增加,系统的稳定裕度先增加后减小。同时,在基准侧偏刚度附近,中轮侧偏刚度增加,虽然过渡时间稍有增加,但系统超调量减小,系统稳定性增加。因此,适当增加中轮侧偏刚度有利于增强系统的稳定性。
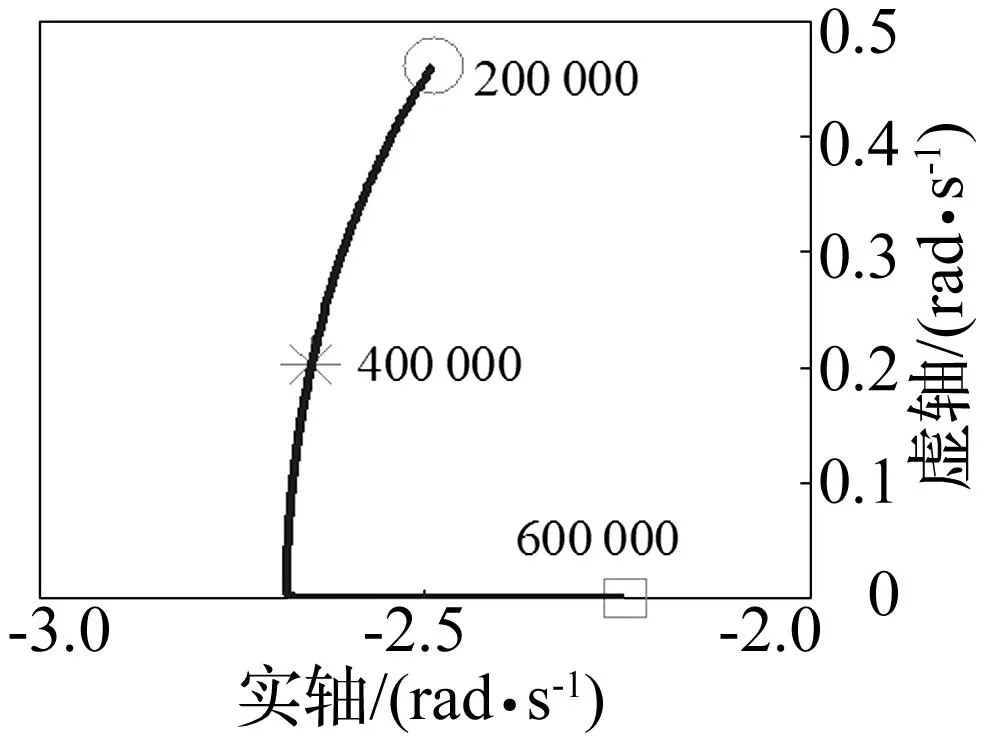
图8 中轮侧偏刚度变化的根轨迹图Fig.8 The root locus of the changing middle wheel cornering stiffness
2.2.6后轮侧偏刚度对瞬态响应特性影响
图9给出了基准刚度为400 000 N/rad,轮胎侧偏刚度在200 000 N/rad~600 000 N/rad范围内变化的根轨迹图。图9中:① 随后轮侧偏刚度的增加,系统阻尼比先不变而后大幅减小,说明车辆反应速度和超调量先不变后大幅增加;② 随后轮侧偏刚度的增加,系统圆频率逐渐增加,说明系统过渡时间逐渐减小;③ 随后轮侧偏刚度的增加,系统的稳定裕度逐渐增加。同时,在选定基准侧偏刚度附近,增加后轮侧偏刚度,虽然系统超调量稍有增加,但过渡时间减小,车辆稳定性增强。因此,适当增加后轮侧偏刚度有利于提高车辆的操纵稳定性。

图9 后轮侧偏刚度变化的根轨迹图Fig.9 The root locus of the changing rear wheel cornering stiffness
3相平面法分析
当轮胎处于非线性域时,上述线性系统理论不再适用,转而采用基于非线性系统理论的相平面分析方法[10]。依然以某三轴车辆为基准车,在不同初始条件下,基于相平面法研究车辆低附着路面转向时的操纵稳定性。
3.1相平面法
3.2β-wz相平面分析
β-wz相平面较多应用于车辆操纵稳定性的分析中,该相平面对车辆的稳定域和非稳定域区分明显。对车辆处于低附着路面工况下,车速、前轮转角和地面附着系数变化时,车辆的操纵稳定性进行研究。为分析轮胎转角对车辆操纵稳定性影响,取路面附着系数为0.4,车速为20 m/s,车辆前轮转角分别为0°、4°两种工况;为分析车速对车辆操纵稳定性的影响,取路面摩擦系数为0.4,前轮转角为2°,车速分别为10 m/s、30 m/s两种工况;为分析路面摩擦系数对车辆操纵稳定性影响,取前轮转角为2°,车速为20 m/s,路面摩擦系数为0.2和0.4两种工况。
由图10(a)、(b)可知:相同地面附着系数和车速条件下,随前轮转角的增加,车辆将难以收敛。图10(b)中,当前轮转角为4°时,车辆状态参数已不能收敛到稳定点。特别当初始的横摆角速度和质心侧偏角符号相反时,车辆失稳严重。
由图10(c)、(d)可知:相同轮胎转角和地面附着系数时,随车速的增加,车辆将难以收敛。图10(d)中,当车速为30 m/s时,车辆状态参数已不能收敛到稳定点。同样,特别当初始的横摆角速度和质心侧偏角符号相反时,车辆失稳严重。
由图10(e)、(f)可知:相同前轮转角和车速时,随地面附着系数的降低,车辆将难以收敛。即使在初始的横摆角速度和质心侧偏角符号相同时,车辆依然难以收敛,失稳严重。





(a) μ=0.4,v=20m/s,δ1=0°(b) μ=0.4,v=20m/s,δ1=4°(c) μ=0.4,v=10m/s,δ1=2°


(d) μ=0.4,v=30m/s,δ1=2°(e) μ=0.4,v=20m/s,δ1=2°(f) μ=0.2,v=20m/s,δ1=2°图10 β-wz相平面图Fig.10Theβ-wzphaseplane


(a) μ=0.4,v=20m/s,δ1=0°(b) μ=0.4,v=20m/s,δ1=4°(c) μ=0.4,v=10m/s,δ1=2°


(d) μ=0.4,v=30m/s,δ1=2°(e) μ=0.4,v=20m/s,δ1=2°(f) μ=0.2,v=30m/s,δ1=2°图11 β-β·相平面图Fig.11Theβ-β·phaseplane
4三轴全轮转向车辆稳定性分析
以某三轴车辆为基准车,基于零侧偏角比例控制策略,实现车辆所有轮胎转向,分析车辆全轮转向后其操纵稳定性的变化[10]。
4.1全轮转向控制机理
全轮转向是通过控制各轮胎转角来改善车辆的转向性能。根据文献[10]中全轮转向零质心侧偏角控制车辆的稳态横摆角速度增益公式可知:全轮转向并不改变车辆的稳定性因素K的表达式,车辆固有转向特性并没有改变,其控制主要体现在对车辆稳态横摆角速度增益上,如图12。

图12 全轮转向稳态特性Fig.12 The steady-state characteristicsof all-wheel steering
由图12知,相比于原不足转向的基准车以及中性转向的基准车,随车速的提高,车辆低速段横摆角速度增益较基准车大,车辆高速段横摆角速度增益较基准车小,其拐点车速为12.5 m/s,这是由于全轮转向改变了车辆的稳态横摆角速度转向增益值。另外,由于全轮转向控制,随车速的提高,车辆低速段横摆角速度增益逐渐增加,高速段横摆角速度增益逐渐降低,其拐点车速为13.5 m/s。
与稳态响应相类似,根据文献中车辆横摆角速度与前轮转角的传递函数可知:全轮转向控制并不改变车辆的根轨迹,其控制主要体现在对车辆稳态横摆角速度转向增益的改变上[12]。因此,在对车辆进行全轮转向控制前,车辆需要具有较为合理的本质属性,比如车辆的瞬态响应特性。
4.2相平面分析

相比具有相同工况的基准车,如图10(d)和图11(d),通过全轮转向控制后,车辆均出现了收敛区域,如图13(a)和图14(a)。同时,进一步降低地面附着系数,车辆依然在小范围内收敛,如图13(b)和图14(b)。


(a) μ=0.4,v=30m/s,δ1=2°(b) μ=0.2,v=30m/s,δ1=2°(a) μ=0.4,v=30m/s,δ1=2°(b) μ=0.2,v=30m/s,δ1=2°图13 全轮转向β-wz相平面图Fig.13Theβ-wzphaseplaneofall-wheelsteering图14 全轮转向β-β·相平面图Fig.14Theβ-β·phaseplaneofall-wheelsteering
5结论
基于根轨迹法和相平面法对某三轴车辆的操纵稳定性进行了研究。为三轴车辆优化设计以及三轴全轮转向车辆的控制系统设计提供了有益参考。
(1) 利用根轨迹法研究了车辆结构和状态参数对车辆瞬态响应稳定性的影响。结果表明:在基准车的基础上,适当增加车辆质量、前轮侧偏刚度、中轮侧偏刚度和后轮侧偏刚度,适当降低车辆的横摆转动惯量有益于进一步改善车辆的瞬态转向特性。另外,车辆车速提高后,其操纵稳定性变差。

(3) 基于零侧偏角比例控制全轮转向,研究了全轮转向控制机理。结果表明:车辆结构参数的优化设计是全轮转向控制的基础。进一步通过相平面法分析了三轴全轮转向对低附着路面转向和高速转向时的控制效果。结果表明:全轮转向扩宽了车辆的稳定区域,提高了车辆的高速操纵稳定性。
综上所述,要提高三轴车辆的操纵稳定性,首先需要进行车辆的结构参数优化,可通过对车辆质量、横摆转动惯量、各轮胎刚度的调整来改善车辆的瞬态响应特性。而后进一步通过零质心侧偏角比例控制的全轮转向来改善车辆稳态转向特性,拓宽车辆稳定性区域。
参 考 文 献
[ 1 ] 张晓江,高秀华,杨铭. 多轴车辆的转向性能[J]. 吉林大学学报:工学版,2009,39(4): 861-863.
ZHANG Xiao-jiang,GAO Xiu-hua,YANG Ming. Steering performance of multi-axle steering vehicle[J]. Journal of Jilin University:Engineering and Technology Edition,2009,39(4): 861-863.
[ 2 ] 韦超毅,谢美芝,盘朝奉,等. 根轨迹法在汽车操纵稳定性研究中的应用[J]. 农业机械学报,2007,38(9):19-22.
WEI Chao-yi,XIE Mei-zhi, PAN Chao-feng,et al. Integrated root locus method and stability factor to study handling stability of automobile[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(9):19-22.
[ 3 ] 韦超毅,陈可,周孔亢,等. 基于根轨迹的拖挂式房车操纵稳定性分析[J]. 农业机械学报,2007,38(2):15-18.
WEI Chao-yi,CHEN Ke, ZHOU Kong-kang,et al. Stability analysis of operation for passenger car-trailer based on root-locus method[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(9):19-22.
[ 4 ] 李华师,韩宝玲,罗庆生,等. 基于模糊控制的三轴车辆全轮转向性能仿真[J]. 农业机械学报,2012,28(13):34-38.
LI Hua-shi,HAN Bao-ling,LUO Qing-sheng, et al. Simulation of all-wheel steering for three-axle vehicle based on fuzzy control[J]. Transactions of the Chinese Society for Agricultural Machinery,2012,28(13):34-38.
[ 5 ] 盖玉先,郭庆悌, 宋健,等. 汽车动力学稳定性的研究[J]. 哈尔滨工业大学学报,2006,38(12):2112-2115.
GAI Yu-xian,GUO Qing-ti,SONG Jian, et al. Research on vehicles’ dynamic stability[J]. Journal of Harbin Institute of Technology,2006,38(12):2112-2115.
[ 6 ] 刘伟. 基于质心侧偏角相平面的车辆稳定性控制系统研究[D]. 吉林:吉林大学,2013.
[ 7 ] 高月磊. 基于相平面稳定域边界的轻型车稳定性控制研究[D]. 吉林:吉林大学,2013.
[ 8 ] 高国. 自动控制原理[M]. 广州:华南理工大学出版社,2003,62-68.
[ 9 ] 张琪昌,王洪礼,竺致文,等. 分岔与混沌理论及应用[M]. 天津:天津大学出版社,2005,50-60.
[10] 刘丽,储江伟,施树明,等. 车辆纵向加速度对操纵稳定性的影响分析[J]. 振动与冲击,2009,28(6):145-149.
LIU Li,CHU Jiang-wei,SHI Shu-ming,et al. Analysis on the influence of vehicle longitudinal acceleration on handling stability[J]. Journal of Vibration and Shock,2009,28(6):145-149.
[11] 袁磊,刘西侠,金毅,等. 一种具有不同转向模式的多轴转向车辆设计[J]. 机械设计制造,2012,10:33-37.
YUAN Lei,LIU Xi-xia,JIN yi, et al. Design for multi-axis turning car at different steering models[J].Machinery Design & Manufacture,2012,10:33-37.
[12] 袁磊,刘西侠,徐国英,等. 三轴车辆转向性能分析[J]. 农业装备与车辆工程,2012,8:10-15.
YUAN Lei,LIU Xi-xia,XU Guo-ying,et al. Analysis on turning characteristics of three-axle steering vehicle[J]. Agriculture Equipment & Vehicle Engineering,2012,8:10-15.
Operating stability analysis for a three-axis vehicle based on a graphical method
LIUXi-xia,YUANLei,LIUWei-ping
(Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
Abstract:A three-axis vehicle has a long length body, a high axial load and complex driving conditions, these make its lateral stability be poor relatively. When the tire slip angle is more than five degrees, the tire reveals stronger nonlinear characteristics. The operating stability of the vehicle was analyzed in a linear domain and a nonlinear domain, respectively. The vehicle model, linear tire model and nonlinear tire model were built. In linear domain, based on the root locus method, the changes of the vehicle’s transient steering characteristics were analyzed with the change of the vehicle structural and state parameters. In nonlinear domain, based on the phase plane method, the relationship between the vehicle operating stability and driving conditions was analyzed. At the end, the control mechanism and operating stability of the all-wheel steering vehicle were analyzed. They provided a theoretical support for the design and control of the three-axis vehicle.
Key words:three-axis vehicle; lateral stability; root locus method; phase plane method
中图分类号:U461.6
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.04.016
通信作者袁磊 男,博士生,1990年7月生
收稿日期:2015-06-02修改稿收到日期:2015-07-17
基金项目:国家自然科学基金(51305457)
第一作者 刘西侠 男,副教授,1974年9月生
E-mail:89985624@qq.com