
铁路航测中应用Inpho软件进行空三数据处理技术方法的研究
2016-04-13 03:26卓云
铁道勘察 2016年1期
卓 云
( 中铁第四勘察设计院集团有限公司,湖北武汉 430063)
铁路航测中应用Inpho软件进行空三数据处理技术方法的研究
卓云
( 中铁第四勘察设计院集团有限公司,湖北武汉430063)
Research on Aerial Triangulation Technology Methods with Inpho in Railway Aerial Survey
ZHUO Yun
摘要介绍Inpho软件中MATCH-AT空三加密模块的功能及其特点,结合铁路航测的生产实践,阐述Inpho软件空三数据处理的技术方法。基于POS数据辅助,可减少外控点数量,应用Inpho软件空三加密仍能保持很高的精度。
关键词铁路航测Inpho空三加密
在铁路航空摄影测量系统中,空三数据处理是最终数字成图的重要环节。其空三加密的过程就是根据少量野外控制点的大地坐标以及在像片上所量测外业控制点和内业加密点的像点坐标,经平差计算,得出加密点的大地坐标及其像片的外方位元素,把大量的野外控制测量工作转移到内业生产,从而缩短航测成图的周期,提高整体的工作效率。随着航空摄影技术的发展,尤其是带有POS系统高分辨率、高精度数字航摄系统的快速发展,高质量且信息丰富的数码影像数据已广泛应用于铁路航测生产。应用Inpho软件对带有POS辅助系统的数码影像进行空三数据处理,使其高精度、高效率及高度自动化的特点在铁路航测生产中的优势得以充分体现。
1Inpho软件空三加密技术特点
Inpho软件是专业的航空摄影测量与遥感处理系统软件,可以全面系统地处理航测遥感、激光、雷达等数据。其空三加密模块为MATCH-AT。主要技术流程及特点如下。
1.1工程设置
包括相机文件设置(焦距、像幅大小、像元大小、主点偏移量及相机畸变差等)、影像导入、GNSS/IMU数据引入、GPS数据导入、测区航带建立等。需要注意以下几个问题:①相机文件的参数要严格按照相机检校报告填写,根据实际情况灵活运用相机设置中坐标系的旋转可解决复杂地形中航向旋转、东西航线与南北航线交错、原始航线与补飞航线重叠等问题。②POS数据是空三数据处理过程中影响精度的关键数据,GNSS/IMU的数据引入时应注意与像控点的坐标系统统一。 ③导入影像时需参照像控点成果中高程设置测区平均高程,这对之后的模型匹配起到重要作用。④可依据GNSS/IMU的数据计算出航线,如果生成航带排列不理想,可增加方位角角度值用于约束航带间关系。
1.2金字塔影像
数码影像下完成的内部金字塔中通过RGB的设置生成影像色彩信息,用来解决后期正射影像制作时匀光匀色的问题。
1.3模型连接点的匹配
MATCH-AT模块的连接点匹配算法是基于特征级和最小二乘匹配相结合的多极影像金字塔匹配算法,其高精度的匹配特征即使在沙漠、森林等纹理比较弱的区域也可以很好地完成匹配工作。在复杂地形中,地形起伏不一,特征地物分布无规则,匹配时可对整体连接点获取不理想的部分区域建立子区,单独获取连接点来解决连接点不准确或连接点不够的问题。也可删除原连接点,保留像控点,在POS数据不参与计算的情况下再次获取连接点。
1.4平差
在放置完像控点及匹配点合理的情况下进行数据平差处理, MATCH-AT模块采用光束法区域网平差模型进行平差解算,其基本理论是中心投影的共线条件方程式,通过每个像点的坐标观测值,按照最小二乘准则平差,得出各加密点坐标。为了保证限差满足精度要求,微调像控点后,可适当调整GNSS/IMU的标准差值,以减少POS信息对平差计算的权重。
2工程实例
以沿海某新建高速铁路的航测内业inpho软件空三加密为例。
2.1基本资料
该测段线路走向为南北向,影像数据是东西航向。采用2000国家大地坐标系为平面坐标系,高程系统采用1985国家高程基准,测区的外控资料平面点为国家四等及以上点,高程点为国家四等及以上水准点。影像数据为带有POS数据的DMC数码航摄仪影像,焦距f=91.968 6 mm,影像尺寸为14 144×15 552,像元大小为5.6 μm,地面分辨率为0.05 m。测区共7个航带,105张影像,每个航带有14个相对。由于像幅小,像对多,外业采用区域网平高布点。像控点布设方案如图1所示,平高点均匀分布在四周,沿航线方向间隔6条基线布设一个高程控制点。

图1 像控点布设方案
2.2空三数据处理
在Applications Master 下建立工程,准确设置相机文件参数,导入影像数据、GNSS/IMU数据、GPS数据等。为了模型连接点匹配的准确,在导入影像时设置飞行区域的地面平均高度值。计算航线生成时设置azimuth tolerance为5°,系统准确计算出7条航线及其分布情况。建立内部金字塔影像之后进行连接点的匹配,由于影像本身的色差、地形地物的遮挡变形等,系统匹配连接点会出现点位不理想、不清晰以及错点的情况,故需先人工确定测区外围4个像控点的点位,再由系统参照GNSS/IMU数据启动空中三角测量进行连接点的匹配。利用Inpho软件影像处理和多影像匹配技术完成模型连接点的点位选择和航带间连接点的转换,匹配单元的大小可根据影像实际情况变化,以保证模型中有足够的连接点。检测连接点匹配情况时,需要在区域网的边缘处适当增加连接点。MATCH-AT模块工作界面如图2。
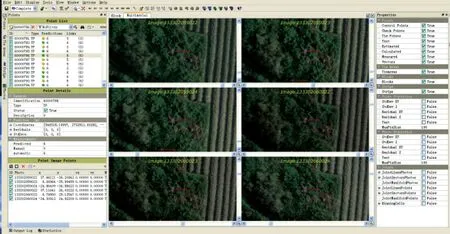
图2 MATCH-AT工作界面
GPS像控点也可利用迭代的方式进行量测:首先提取连接点,然后手工量测测区外围的控制点,再次获取连接点后像控点的位置只需做微调即可。在实际空三加密作业中,遇到错点或者判断不清的点,可以有针对地选择用于平面或者高程控制,以提高整个区域的加密精度。如本测区中像控点Y65023用于高程控制,该测区的平差结果如表1所示。

表1 平差结果 m
2.3成果分析
依据规范,1∶2 000区域网外业布点航线数为2~4条,高程控制点间隔为4~6条基线,而本测区在影像像幅小,基线短的情况下区域网放宽为7航线,高程控制点按7基线布设,基于POS辅助下利用inpho软件空三加密后得出的像控点残差能够满足规范中1∶2 000精度要求。在空三数据处理过程中,精度关系着数字成图的质量。本算例中选取3个中间野外控制点作为检查点,通过外围像控点做区域网平差计算,其比较后精度对比如表2。

表2 精度检核 m
通过以上对比可以看出,用inpho进行空三加密的精度能够满足铁路航空摄影测量1∶2 000空三数据处理规范的要求,说明inpho系统下区域网平差具稳定性及均衡性。使用inpho进行空三加密不仅可以大大降低对野外控制点数量上的需求,而且效率也有明显的提高。
3结束语
数码影像像幅小、像对基线短,相较光学影像,同一测区的像片数量、像对数增加很多,基于POS辅助应用Inpho软件对数码影像数据进行空三加密,具有高精度、高效率、高自动化,能够实时发现外业中的粗差点并快速有效地完成空三数据处理。
采用inpho空三加密在POS辅助下可以有效减少外业控制点的数量,缩短航测生产周期。而将外业控制点均匀分布在测区中有利于提高测区加密成果的精度。
参考文献
[1]马军.ORIMA空三加密软件在铁路航测中的应用与开发[J].铁道勘察,2009(2)
[2]胡海友.基于Inpho的空三加密及正射影像制作方法研究[J].铁道勘察,2013(6)
[3]刘江瑜.基于新型传感器的空三加密研究及精度分析[J].铁道勘察,2013(2)
[4]杨希.INPHO软件进行带状测区数码影像的POS辅助空三加密方法探讨[J].铁道勘察,2015(2)
[5]陈书贵.对DMC影像进行空三加密的生产试验[C]∥2006年铁道勘测技术学术会议论文集.北京:铁道勘测技术专业委员会,2006
[6]刘艳芳.ADS40数字航摄仪在铁路航测中的生产试验[J].铁道勘察,2010(1)
[7]龙海奎,曾庆友,吴珊.POS系统在空三加密中的应用与分析[J].城市勘测,2011(5)
中图分类号:P231.4; P231.5
文献标识码:A
文章编号:1672-7479(2016)01-0031-03
作者简介:卓云(1982—),女,2006年毕业于中国地质大学地理信息系统专业,工程师。
收稿日期:2015-12-07
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
理论与创新(2020年15期)2020-10-09
河南城建学院学报(2020年3期)2020-08-14
辽宁省博物馆馆刊(2020年0期)2020-08-13
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
企业科技与发展(2018年5期)2018-09-10
新课程·小学(2017年8期)2017-09-20
IT经理世界(2017年4期)2017-03-25
