
双电机四轮驱动电动汽车自适应驱动防滑控制的研究*
2016-04-12 01:21孙大许兰凤崇何幸福陈吉清
汽车工程 2016年5期
孙大许,兰凤崇,何幸福,陈吉清
(1. 广东机电职业技术学院, 广州 510515; 2. 华南理工大学机械与汽车工程学院,广州 510640; 3. 广东省汽车工程重点实验室,广州 510640)
2016097
双电机四轮驱动电动汽车自适应驱动防滑控制的研究*
孙大许1,2,兰凤崇2,3,何幸福2,3,陈吉清2,3
(1. 广东机电职业技术学院, 广州 510515; 2. 华南理工大学机械与汽车工程学院,广州 510640; 3. 广东省汽车工程重点实验室,广州 510640)
为在双电机四驱电动汽车上实现纯电机控制的驱动防滑功能,在不同附着系数的路面上,采用PID控制的方法对控制参数进行优化。在此基础上,采用径向基函数系统辨识的单神经元自适应控制算法,对PID控制参数进行在线自适应调整,从而提高了控制算法的响应速度和鲁棒性。在不同路面上进行了离线仿真和快速原型在环试验。结果表明,采用该控制算法,能在不同路面工况下实现电动汽车的驱动防滑功能,与PID算法相比,提高了自适应能力、控制精度和速度,并满足实时性控制要求。
电动汽车;驱动防滑控制;径向基函数;遗传算法
前言
驱动防滑系统(acceleration slip regulation,ASR)是能够在车辆驱动过程中提高车辆加速性能和保证车辆稳定性的主动安全系统,其原理是将驱动轮的滑转率控制在最佳滑转率附近,保证轮胎与地面之间具有良好的附着力,从而获得良好的驱动性能和操纵稳定性[1-2]。传统汽车的ASR系统,通常是通过减少节气门的开度来降低发动机功率或控制驱动轮的制动转矩以防止车辆在起步加速过程中驱动轮的过度滑转。电动汽车的动力主要来自电机,对电机的输出转矩控制具有控制精度高和响应速度快的优势,因此在电动汽车上,完全可以采用纯电机控制的方式实现ASR功能,并能够与路面识别系统相结合,在不同附着系数的路面上实现滑转率的最佳精确控制。
在控制电机输出转矩实现ASR方面,已有不少研究。文献[3]中利用电机转矩控制快速、准确的优势,采用模型跟踪和滑转率最优控制的方法对电动汽车的驱动防滑系统进行了研究,并进行了实验,验证了控制系统的实际效果。文献[4]中利用电机驱动本身的特性,避免了车速的测量,利用电驱动动力学模型对车轮的滑转率进行估计,并通过实验验证了电动汽车的驱动防滑控制效果。文献[5]中基于轮胎与路面非线性特性,提出一种利用驱动电机转速与转矩反馈实现驱动防滑控制的方法,并与最佳滑转率比例积分(PI)控制和动态转矩控制相结合,开发了电机转矩自适应驱动防滑控制器,但轮胎逆模型难以求解,且PI控制无法适应多种路面。文献[6]中采用模糊自整定PID控制算法设计了双轮驱动电动汽车的防滑控制系统,并通过仿真验证了模糊自整定控制器优于单一的PID控制器。
本文中在综合电动汽车驱动防滑控制研究的基础上,提出基于径向基函数(radial basis function, RBF)系统辨识的单神经元自适应PID控制方法(以下简称“RBF自适应控制算法”),来实现ASR功能,该方法是在PID控制算法的基础上,针对PID控制算法适应性差、鲁棒性不强的缺点,采用RBF系统辨识的单神经元自适应控制算法,对PID控制参数进一步在线自适应调整,提高控制系统的适应性、调整速度和精度。利用多目标遗传算法对径向基函数系统辨识的单神经元控制中的比例、积分、微分的学习速率、神经网络辨识的学习速率和神经网络辨识的动量因子进行优化整定,并在不同附着系数的路面上进行离线仿真和快速控制原型在环实时试验,对控制算法的效果和实时性进行验证。
1 整车结构与驱动防滑控制逻辑
目标车型为双电机四驱电动汽车,整车驱动部分结构布局如图1所示,整车及主要部件的主要参数如表1所示。采用两个驱动电机分别驱动前轴和后轴,前驱动系统和后驱动系统完全相同,结构上前后对称;前后轴上的电机驱动力均可根据需要进行调节,由于驱动电机同时控制左右两侧车轮上的驱动力矩,在驱动防滑控制中须采用“高选原则”,即在每一时刻,把滑转率较大的车轮作为控制对象。
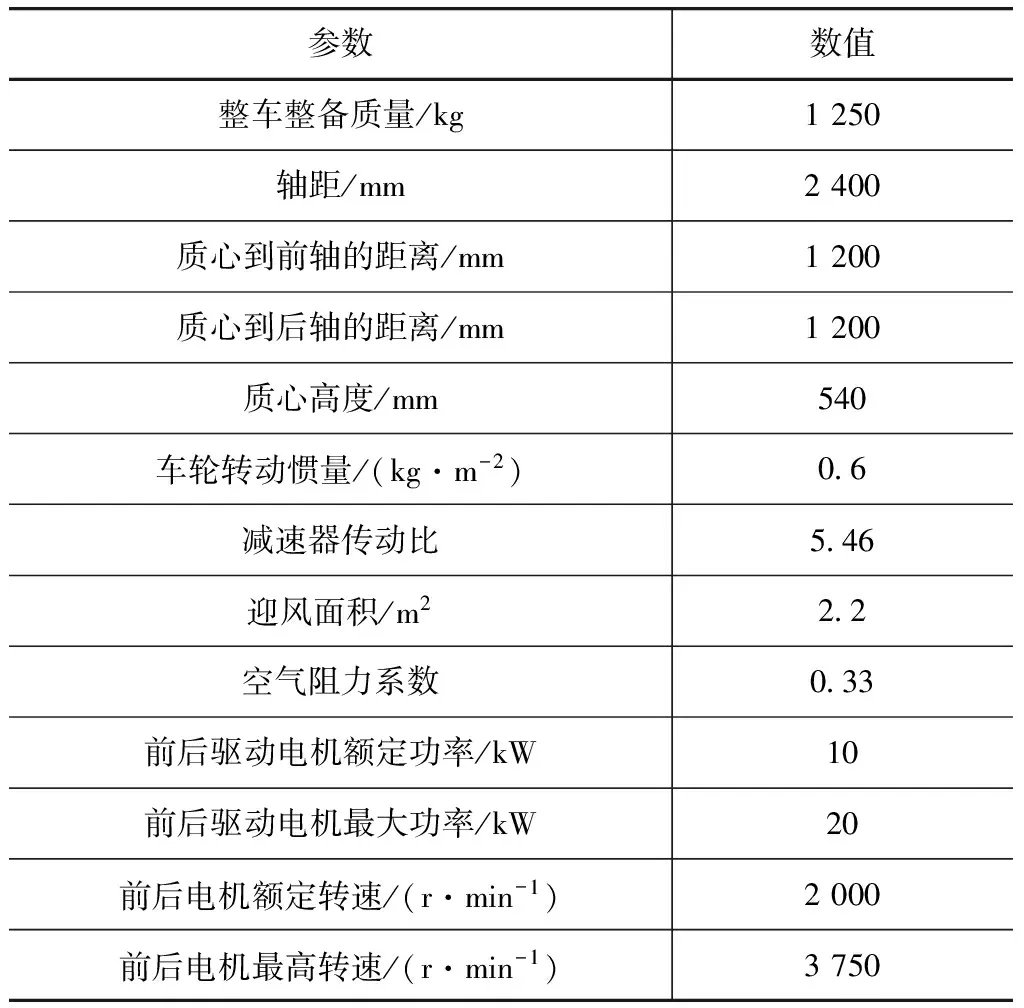
表1 目标车型的主要参数
ASR控制器根据左右两侧车轮的滑转率差来确定车辆是否在均一路面行驶, 当滑转率差小于一定阈值时,为均一路面,否则为非均一路面。当车辆在非均一路面行驶时,按照经验滑移率进行控制。当车辆在均一路面行驶时,根据路面识别模块识别的最佳滑转率进行控制。由汽车理论[7]可知,大部分路面的最佳滑转率在20%以下,由于低速电动汽车动力相对不足,一般在较低附着系数的路面上才会出现驱动轮过度滑转现象,因而本文中采用20%为ASR系统启动的阈值;冰路面上最佳滑转率在10%左右,取车轮最大滑转率为5%以下时,不启动路面识别的计算,以节约系统能耗。
PID控制算法具有控制简单,无须建立控制对象准确的数学模型,因而具有易于工程应用的优点。在PID控制算法中,为避免系统出现大的超调,采用了积分分离型PID控制算法。在传统的PID控制算法的基础上,采用开发的RBF自适应控制算法取代PID控制算法,通过实时调整PID算法的控制参数,以改善控制算法的自适应性和鲁棒性。ASR控制逻辑图如图2所示(图中S表示滑转率)。从图中可以看出,控制逻辑采用了纯滑转率ASR控制的方法。与固定门限值法纯滑转率其它控制算法相比,该逻辑由于采用了识别的最佳滑转率目标值进行控制,对不同路面的适应性更好。其工作过程为,当车辆加速过程中,系统实时计算驱动轮的滑转率,当两侧车轮的滑转率差值大于某一阈值(文中根据冰路面最佳滑转率10%左右,压实雪路面最佳滑转率15%左右,取5%)时,系统判断为非均一路面,为了防止系统在复杂路面上频繁改变目标值和误判,当最大滑转率大于20%时,ASR控制被触发,此时以经验值作为目标滑转率,对滑转率较大的车轮进行控制;否则,系统认为行驶的路面为均一路面,同时,系统判断车轮的滑转率大于5%时,启动对路面的最佳滑转率识别,当滑转率大于20%时,ASR控制被触发,路面识别系统输出识别的最佳滑移率,进行自适应控制。ASR系统一旦被触发,就一直保持触发状态,直到加速踏板被松开或制动踏板被踩下,ASR系统退出控制,等待下一次触发到来。图2中的控制模式切换是指当ASR控制启动时,驱动电机的输出转矩由积分分离型PID控制或RBF自适应控制模块输出,当ASR不启动时,驱动电机的输出转矩由加速踏板直接控制。
2 双电机四驱电动汽车动力学模型
双电机四驱电动汽车,前后驱动系统为对称结构,前后驱动系统的动力学模型完全相同,以前驱动系统为例建立驱动轮动力学模型:
(1)
(2)

将式(1)和式(2)相加得
(3)
从驱动电机到驱动轮的动力学模型为
(4)

由式(3)和式(4)可以看出,通过控制驱动电机的输出转矩可同时改变左右两侧驱动轮的驱动转矩,从而可以控制驱动轮的角加速度和转速,结合车速即可进一步控制驱动轮的滑转率,利用电机转矩控制响应速度快的优势,采用高选原则(控制滑转率较大的车轮),从而实现把左右两侧驱动轮的滑转率控制在目标值附近。
3 相关控制算法
3.1 路面识别方法
路面识别是主动安全控制中实现精确控制的前提,基于精确控制的ASR必须与准确的路面识别算法相结合。由汽车理论[7]可知,在车辆加速过程中,轮胎与地面之间的利用附着系数μ与滑转率λ有密切的关系,在不同的路面有不同的μ-λ关系,由μ-λ曲线可以看出,μ有极大值。在ABS控制中,需要在很短的时间内,对路面的附着系数进行识别,识别算法要求简单且实时性好。在文献[8]和文献[9]中,采用了利用附着系数极大值的方法,该算法简单、快速,本文中也采用此方法对路面状况进行识别。具体识别算法为
dμ(λ(k))=μ(λ(k))-μ(λ(k-1))
(5)
dμ(λ(k-1))=μ(λ(k-1))-μ(λ(k-2))
(6)
式中:λ(k)为k时刻车轮的滑转率;μ(λ(k))为k时刻车轮对应的利用附着系数。
当dμ(λ(k))<0且dμ(λ(k-1))>0时,μ出现极大值,可近似为
μmax≈μ(λ(k-1))
(7)
3.2 积分分离型PID控制算法
在实际车轮滑转率与目标滑转率差异较大时,传统PID控制方法会造成较大超调量,甚至引起系统的振荡。引入积分分离控制思想,当差值较大时,取消积分项;当差值小于阈值时,引入积分项。其控制规则如下:(1)当|e(k)|≥ε时,采用PD控制,避免较大超调量,增加响应速度;(2)当|e(k)|<ε时,采用PID控制,消除静态误差。其中,e(k)为k时刻目标值与实际值之间的差值,ε为人为设定阈值。
积分分离型增量PID控制算法可写为
μ(k)=μ(k-1)+kP(e(k)-e(k-1))+
βkIe(k)+kD(e(k)-2e(k-1)+
e(k-2))
(8)
式中:kP,kI和kD为PID控制参数;β为积分项开关数。
3.3 径向基函数单神经元自适应PID控制算法
RBF自适应算法[10-11]是在传统PID控制和单神经元自适应控制基础上,通过RBF网络对系统进行辨识,引入对象输出对输入的灵敏度信息(Jacobian信息),提高系统自适应能力。
RBF网络输入量x=[x1,x2,…,xn]T,径向基向量h=[h1,h2,…,hm]T,其中hj一般用高斯基函数[10-11]表示:
(9)
式中:Cj为第j个节点的中心矢量,Cj=[cj1,cj2,…,cji,…cjn]T,i=1,2,…,n。网络的基宽向量B为
B=[b1,b2,…,bm]T
(10)
网络的权向量W为
W=[w1,w2,…,wm]T
(11)
k时刻辨识网络输出ym(k)为
(12)
辨识器的性能指标A为
(13)
式中y(k)为k时刻系统的实际输出量。
根据梯度下降法,输出权、节点中心和节点宽度参数的迭代算法为
Δwj(k)=η(y(k)-ym(k))hj
(14)
wj(k)=wj(k-1)+Δwj(k)+
α(wj(k-1)-wj(k-2))
(15)
(16)
bj(k)=bj(k-1)+Δbj+α(bj(k-1)-
bj(k-2))
(17)
(18)
cji(k)=cji(k-1)+Δcji(k)+α(cji(k-1)-
cji(k-2))
(19)
式中:η为学习速率;α为动量因子。
得到Jacobian阵的算法为
(20)
其中x1=Δu(k)
PID控制的控制误差为
e(k)=yd(k)-y(k)
(21)
设PID控制的3项输入为
(22)
控制律为
(23)
神经网络自适应整定的性能指标为
(24)
神经网络的3项输入为
(25)
kP,kI和kD采用梯度下降法进行自调整,其调整算法为
(26)
式中:ΔkP,ΔkI和ΔkD分别为kP,kI和kD的调整量;ηP,ηI和ηD分别为ΔkP,ΔkI和ΔkD的调整速率。
根据上述RBF自适应控制算法,需要确定的参数有径向基向量h、网络中心矢量的Cj、网络基宽向量B、网络权向量W、kP,kI,kD的初值、学习速率η、动量因子α和ΔkP,ΔkI,ΔkD的调整速率ηP,ηI,ηD。对于PID自适应调整控制,h,Cj,B和W的初值根据文献[12]获得,kP,kI,kD的初值由传统PID控制算法的优化整定得到,η,α,ηP,ηI和ηD是与实际工作过程相关的控制参数,需要通过结合实际工作过程优化整定得到。
4 离线仿真
4.1 仿真参数的确定
AVL CRUISE软件是用于仿真车辆动力性、经济性和排放性的专业软件,特别适用于车辆动力传动系统的开发,可以计算并优化车辆的动力性能和制动性能。采用该软件建立的整车模型,可方便地与MATLAB/Simulink模型相结合,进行ABS/ASR和其他控制策略的开发分析[13-14]。
为确定本文中的目标车型在不同附着系数路面上加速时驱动轮的过度滑转情况,首先在无ASR控制下,分别在附着系数为0.1的冰路面和附着系数为0.2的压实雪路面上进行全负荷急加速测试,在AVL CRUISE中的仿真结果如图4所示。可以看出,只有在冰路面上紧急加速时,才出现了驱动轮过度滑转情况。因而在后面的研究中,主要针对冰路面及与冰路面有关的复合路面,对ASR控制进行研究。
采用积分分离PID控制算法在MATLAB/Simulink环境中建立ASR控制模型,并与AVL CRUISE中建立的双电机四驱电动汽车整车模型相结合构成联合仿真模型,在冰路面上由静止进行全负荷加速测试,并采用多目标遗传算法对前后电机ASR的PID控制参数(kPF,kDF,kIF,kPR,kIR,kDR)进行优化整定(控制参数的下标F和R分别表示前电机和后电机),优化整定的最优结果为(10.15,12.34,2.95,18,12.34,13.22)。
以积分分离型PID控制算法的控制参数为初值,采用RBF自适应控制算法取代PID控制算法。在冰路面上,利用多目标遗传算法再对基于径向基函数的神经网络相关参数(ηPF,ηIF,ηDF,ηPR,ηIR,ηDR,ηF,ηR,α)进行优化整定的结果为(0.27,0.60,0.66,0.79,0.68,0.72,0.59,0.79,0.48)。利用优化的参数,采用积分分离型PID控制算法和RBF自适应控制算法开发的ASR控制器分别在均一路面、对接路面和对开路面上进行急加速仿真,验证控制策略的有效性。
4.2 均一路面仿真
采用径向基函数系统辨识的自适应控制算法,在冰路面上进行的起步加速测试结果如图5所示。可以看出,系统能够识别出适应路面的最佳目标滑转率为0.1,并把前后轮滑转率控制在目标值0.1附近,前后电机转矩稳定在50N·m左右,仅从均一的冰路面上测试结果来看,与PID控制算法区别不大。
4.3 对接路面仿真
4.3.1 对接路面1:冰路面变为压实雪路面
在冰路面变为压实雪路面的对接路面上,进行急加速起步时的仿真结果如图6所示。可以看出,自适应控制算法和PID控制算法均能够把前后车轮的滑移率控制在目标值附近,并能够根据路面变化进行调整,两种算法的控制结果相差不大。
4.3.2 对接路面2:压实雪路面变为冰路面
在压实雪路面到冰路面的对接路面进行测试的结果如图7所示。可以看出,采用PID控制算法在车辆加速过程中经过路面接口后,不能把车轮的滑转率调整到目标值附近;而RBF的自适应控制算法能够把驱动轮滑转率调整到目标值附近。结果表明RBF自适应控制算法与传统PID控制算法相比,具有自适应性好、鲁棒性强的优势,也说明单纯采用PID控制算法,很难适应所有路面的变化情况。
4.4 对开路面仿真
在右边为冰路面左边为压实雪路面的对开路面上,对电动汽车进行急加速测试的结果如图8所示。可以看出,自适应ASR控制算法实现了对滑转率较大一侧车轮的滑转率的调节,并调整到了目标值附近,而压实雪路面上的车轮滑转率没有发生过度滑转现象,与PID算法控制效果相同。
5 硬件在环试验
利用dSPACE集成开发平台,把RBF自适应ASR控制算法加载到dSPACE DS1401中开发出快速控制原型;同时,把AVL CRUISE中开发的整车模型加载到dSPACE DS1006中构成整车仿真器,然后快速控制原型通过CAN通信的仿真与仿真器相连接,构成快速控制原型在环实时测试平台,其实物连接图如图9所示。
分别在冰路面、从冰路面到压实雪路面的对接路面、从压实雪路面到冰路面的对接路面和冰路面与压实雪路面的对开路面上,由静止状态进行急加速测试,验证在实时环境下自适应ASR的控制效果。
5.1 冰路面试验
电动汽车在冰路面上进行紧急加速时, RBF自适应控制算法的纯电机ASR实时仿真结果如图10~图13所示。从图中可以看出,路面识别系统能够识别出最佳滑转率为0.1,前后轮滑转率成功地被控制在0.1左右,前后电机的转矩被控制在45N·m左右,轮速保持在车速上方,车辆的加速度曲线维持在0.98m/s2附近,证明了在冰路面上,系统实现了ASR的效果。
5.2 对接路面1:冰路面变为压实雪路面
在冰路面变为压实雪路面的对接路面上的紧急加速时的实时仿真结果如图14~图17所示。可以看出,在冰路面上时,前后车轮滑转率被调整到0.1附近;在压实雪路面上,驱动电机在达到最大输出转矩时仍然没有使驱动轮过度滑转,前后驱动电机的输出转矩保持在最大值附近,在冰路面时加速度为0.98m/s2左右,过渡到压实雪路面上时,加速度稳态最大达到1.5 m/s2。
5.3 对接路面2:压实雪路面变为冰路面
从压实雪路面变为冰路面的对接路面上的仿真结果如图18~图20所示。可以看出,在车辆驱动加速过程中,由附着系数相对较高的压实雪路面过渡到附着系数相对较低的冰路面上时,前后车轮的滑转率被调整到0.1上下波动,并逐步收敛到0.1附近较小的范围,实现了ASR控制。
5.4 冰路面与压实雪路面的对开路面
车辆在冰路面与压实雪路面的对开路面上进行紧急加速时实时仿真结果如图21~图24所示。可以看出,位于冰路面上的车轮的滑转率被控制在0.1左右,位于压实雪路面上的车轮滑转率保持在一个较小值之内,车辆的加速度被控制到了0.98m/s2附近,实现了对整车的ASR控制。
6 结论
(1) 在均一路面上进行紧急起步加速时,PID控制算法与基于径向基函数系统辨识的自适应控制算法的ASR控制效果相差不大,主要是因为均一路面上工况相对稳定,PID控制参数可调整的范围较小,自适应控制不能发挥自适应的优势。
(2) 在从压实雪路面到冰路面的对接路面上进行紧急起步时,在路面的过渡阶段,前轮在冰路面上而后轮在压实雪路面上时,采用PID控制控制参数不能适应这种工况的变化,未能把驱动轮的滑转率控制到目标值附近;而基于径向基函数系统辨识的自适应控制算法能够发挥控制算法的自适应的优势,自动地调整PID控制参数,从而能够顺利地把驱动轮的滑转率调整到目标值附近。
(3) 采用自适应控制算法进行快速原型在环实时试验时,在从压实雪路面到冰路面的工况下,驱动轮的滑转率在0.1上下波动,控制效果与离线仿真相比波动较大,说明在复杂工况下,实际的控制效果要比离线仿真的效果差。
[1] 张弦,罗禹贡,范晶晶,等. 电动车辆驱动防滑控制方法的研究[J]. 车辆与动力技术,2007(3): 13-19.
[2] 杨宇,杨毅,余达太,等. 电动汽车驱动防滑控制系统(ASR)的研究[J]. 自动化技术与应用,2004, 23(2): 29-32.
[3] HORI Y, TOYODA Y, TSURUOKA Y. Traction Control of Electric Vehicle: Basic Experimental Results Using the Test EV “UOT Electric March”[J]. IEEE Transactions on Industry Applications, 1998, 34(5): 1131-1138.
[4] FUJII K, FUJIMOTO H. Traction Control Based on Slip Ratio Estimation Without Detecting Vehicle Speed for Electric Vehicle[J].IEEE, 2007: 688-693.
[5] 张利鹏,李亮,祁炳楠,等. 分布式驱动电动汽车转矩自适应驱动防滑控制[J]. 机械工程学报,2013, 49(14): 106-113.
[6] 杨化方,李军伟. 双轮驱动电动汽车防滑控制系统的研究[J]. 农业装备与车辆工程,2009(2): 14-17.
[7] 余志生.汽车理论[M]. 北京:机械工业出版社, 2009.
[8] 王吉. 电动轮汽车制动集成控制策略与复合ABS控制研究[D]. 长春:吉林大学, 2011.
[9] 余卓平,左建令,陈慧. 基于四轮轮边驱动电动车的路面附着系数估算方法[J]. 汽车工程, 2007, 29(2): 141-145.
[10] 邵伍周,唐忠,蔡智慧,等. 基于RBF神经网络在线辨识的永磁同步电机单神经元PID矢量控制[J]. 电力科学与技术学报,2007, 22(2): 48-52.
[11] 刘寅虎,李绍铭. 基于动态RBF神经网络在线辨识的单神经元PID控制[J]. 系统仿真学报,2006, 18(增2): 804-807.
[12] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2013.
[13] 李献菁,孙永正,邓俊,等. 插电式串联混合动力汽车发动机起停控制策略的优化[J]. 汽车工程, 2011, 33(2): 112-117.
[14] 王庆年,曲晓冬,于远彬,等. 复合电源式混合动力公交车功率分配策略研究[J]. 汽车工程, 2014, 36(4): 389-393.
Study on Adaptive Acceleration Slip Regulation for Dual-motor Four-wheel Drive Electric Vehicle
Sun Daxu1,2, Lan Fengchong2,3, He Xingfu2,3& Chen Jiqing2,3
1.GuangdongMechanical&ElectricalPolytechnic,Guangzhou510515; 2.SchoolofMechanical&AutomotiveEngineering,SouthChinaUniversityofTechnology,Guangzhou510640; 3.GuangdongProvinceKeyLaboratoryofVehicleEngineering,Guangzhou510640
To realize the acceleration slip regulation (ASR) function of pure motor control for dual-motor four-wheel drive electric vehicles, the control parameters are optimized with PID control method on roads with different adhesive coefficients. On this basis, an online adaptive adjustment is conducted on PID control parameters by using single neuron adaptive control algorithm based on radial basis function system identification, enhancing the response speed and robustness of control algorithm. An off-line simulation and a rapid prototype-in-the-loop test are performed on different roads. The results show that the use of control algorithm proposed can realize the ASR function of electric vehicles on different road conditions, enhance adaptability and control accuracy and speed, meeting the requirements of real time control, compared with PID algorithm.
EV; ASR; radial basis function; genetic algorithm
*广东省科技计划项目(2014B010106002,2014B010125001)资助。
原稿收到日期为2014年7月7日,修改稿收到日期为2014年9月16日。
猜你喜欢
选煤技术(2022年2期)2022-06-06
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
湖北工业大学学报(2021年2期)2021-04-28
中国新技术新产品(2020年4期)2020-05-05
电机与控制学报(2018年9期)2018-05-14
科技创新导报(2016年27期)2017-03-14
